
Robust Face Recognition using Key-point Descriptors
Soeren Klemm, Yasmina Andreu, Pedro Henriquez and Bogdan J. Matuszewski
Robotics and Computer Vision Research Laboratory, School of Computing Engineering and Physical Sciences,
University of Central Lancashire, Preston, U.K.
Keywords:
Face Recognition, SIFT, SURF, ORB, Feature Matching, Face Occlusions.
Abstract:
Key-point based techniques have demonstrated a good performance for recognition of various objects in nu-
merous computer vision applications. This paper investigates the use of some of the most popular key-point
descriptors for face recognition. The emphasis is put on the experimental performance evaluation of the
key-point based face recognition methods against some of the most popular and best performing techniques,
utilising both global (Eigenfaces) and local (LBP, Gabor filters) information extracted from the whole face
image. Most of the results reported in literature so far, on the use of the key-points descriptors for the face
recognition, concluded that the methods based on processing of the full face image have somewhat better
performances than methods using exclusively key-points. The results reported in this paper suggest that the
performance of the key-point based methods could be at least comparable to the leading “whole face” meth-
ods and are often better suited to handle face recognition in practical applications, as they do not require face
image co-registration, and perform well even with significantly occluded faces.
1 INTRODUCTION
Face is one of the most frequently used biometric fea-
tures. It is used for subject recognition and iden-
tity verification with the most commonly listed ad-
vantages, including ubiquitous, non-contact and non-
invasive data acquisition. For many years, face recog-
nition and related research have been of great inter-
est to computer vision and image processing com-
munities, with applications exploited in public secu-
rity (Chellappa et al., 1995), fraud prevention (Jafri
and Arabnia, 2009) and crime prevention and detec-
tion (Kong et al., 2005). Although a fair amount
of research has been made on the development of
face recognition systems based on range and 3D face
scans (Zhang and Gao, 2009), the 2D image based
systems are still being investigated due to prevalence
of the relevant acquisition systems as well as simplic-
ity and low cost of such systems. One of the most
popular techniques applied to face recognition uses
a specially designed image transformation model to
represent faces in a more compact and/or discrimi-
native manifold. The typical examples of this class
of techniques include Principal Component Analy-
sis (PCA) (Yang et al., 2004), Linear Discriminant
Analysis (LDA) (Belhumeur et al., 1997) or Inde-
pendent Component Analysis (ICA) (Bartlett et al.,
2002). These techniques are often called global meth-
ods, as the transformation uses the whole face to
find the corresponding representation in the target
manifold and the representation in that manifold can
strongly depend on the spatially distant points in the
original face image. In recognition of the difficulties
with global methods in dealing with images captured
in real settings, for example with changing illumina-
tion condition, another class of methods have been
proposed, focused on extraction of local discrimina-
tive information. These techniques usually do not
require images to be transformed to a different do-
main, but rather calculate local descriptors for all the
pixels representing the face. These descriptors are
subsequently integrated in a form of localised his-
tograms with the final feature vector created through
concatenation of the local histograms. The most pop-
ular techniques in this class include Local Binary
Patterns (LBP) (Ahonen et al., 2006) and Gabor fil-
ters (Xie et al., 2010). Yet another class of methods is
based on calculation of the local descriptors but only
in the image regions associated with anatomically sig-
nificant and predefined facial landmarks, such as eye
or mouth corners. In the realm of processing im-
ages in practical applications all these techniques ex-
hibit some deficiencies. In case of global and local
methods based on processing of the whole face im-
ages, the basic requirement is that the database and
the query images are spatially co-registered and accu-
447
Klemm S., Andreu Y., Henriquez P. and Matuszewski B..
Robust Face Recognition using Key-point Descriptors.
DOI: 10.5220/0005314404470454
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 447-454
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

rately cropped. This process is prone to errors partic-
ularly when faced with constraints imposed by prac-
tical applications. Similarly the anatomical landmark
based methods require that the landmarks are accu-
rately identified. The methods investigated in this pa-
per, based on key-point descriptors, do not require im-
age co-registration or accurate image cropping or in-
deed accurate detection of anatomical landmarks as
the selection of the relevant key points is inherently
embedded in the methods’s key point matching. The
main premise of this paper is that the techniques based
on the key points can achieve comparable results with
other techniques, and are more robust when dealing
with images acquired in practical applications. The
paper proposes the testing methodology and presents
the comparative test results between the most popu-
lar methods based on the whole image processing and
popular key-point methods. The performance of these
techniques with respect to facial occlusion is tested in
some detail as an example of the robustness of these
methods to the conditions often met in real applica-
tions.
2 BASELINE METHODS
For years, face recognition methods based on Eigen-
faces and Local Binary Patterns have been widely em-
ployed reporting successful recognition rates under
different scenarios. Over time, this has led to con-
sider these two techniques as standard face recogni-
tion methods. Nevertheless, new face recognition ap-
proaches have continued to be published, such is the
case for Local Gabor XOR Patterns. According to
the latest survey on face recognition (Bereta et al.,
2013), Local Gabor XOR Patterns is a state-of-the-
art method due to the very good recognition rates
reported. In this section these well-established face
recognition techniques are briefly described.
Eigenfaces method is an early technique of de-
scribing images of faces with a relatively low di-
mensional vector. The method was Proposed by
Sirovich and Kirby (Sirovich and Kirby, 1987). The
feature vector of an image is calculated by first
subtracting a mean face image and then perform-
ing a Karhunen-Loeve transform/Principal Compo-
nent Analysis (PCA). Eigenfaces relies on well ad-
justed input images that have been normalized with
respect to illumination and contrast and aligned with
major landmarks that, if not perfectly aligned, intro-
duce detection errors, as they will have an influence
on scale, position and rotation of the image.
Local Binary Patterns (LBP) were originally de-
fined to describe image textures (Ojala et al., 2002).
However, they have been applied to describe face im-
ages achieving high face recognition rates (Ahonen
et al., 2006). LBP based descriptors have become a
state-of-the-art approach in face analysis not only for
their successful results but for the fact that they are not
affected by changes in mean luminance since they are
invariant against greyscale shifts (Ojala et al., 2002).
An LBP number provides information about the dis-
tribution of grey level values of a circularly symmet-
ric set of neighbouring pixels. Given a face image and
its division into equally sized regions, a histogram is
computed for each region. The resulting descriptor
comprises the concatenation of all histograms. LBP
descriptors can be affected by face localisation errors
because they are based on descriptions of local re-
gions of the images.
Local Gabor XOR Patterns (LGXP) (Xie et al.,
2010) are a descriptor based on Gabor filters and
Local XOR Patterns. This method is one of the
best methods for face recognition according to the
most recent face recognition survey (Bereta et al.,
2013). This descriptor utilises Gabor filters which
have proved to be a powerful tool for addressing dif-
ferent computer vision tasks including face recogni-
tion (Xie et al., 2010). The idea behind LGXP is to
use the Gabor phase information but alleviating its
sensitivity to the varying positions. With that purpose,
the Gabor phase is quantised to a set of ranges, so if
various phases belong to the same interval they are
treated as a similar descriptor. Then the Local XOR
Pattern operator is applied to quantised phase maps.
As for the previous descriptor, this method also re-
quires the face images to be aligned.
3 FACE RECOGNITION BASED
ON KEY POINTS
In the previous section, the most widely employed
face recognition approaches were introduced. How-
ever, other methods can be applied to address this
problem. A well-known set of techniques for gen-
eral object detection and recognition is investigated
in the following sections. These techniques search for
characteristic points (usually known as key points) in
the image that usually correspond to corners or blobs,
which are regions of the image where some proper-
ties remain constant. Next, information about the sur-
rounding of these key points is extracted and the im-
age is characterised by the set of all extracted descrip-
tors.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
448

3.1 Key-point Detectors and
Descriptors
One of the most popular techniques of this kind
is Scale Invariant Feature Transform (SIFT) (Lowe,
2004), which has been used for solving face recog-
nition problems achieving competitive results (Luo
et al., 2007; Geng and Jiang, 2009; Dreuw et al.,
2009; Kisku et al., 2010). These works propose modi-
fications or extensions to SIFT in order to improve the
recognition rates. In this paper a comparison of the
robustness of the different baseline face recognition
methods and key point based techniques is presented.
Hence, any improvement that can be applied to key-
point detectors and descriptors, could be applied to
the described approach as well.
The SURF feature detector and descriptor was
proposed as a faster but at least as powerful alterna-
tive to the SIFT detector/descriptor (Bay et al., 2008).
Both descriptors have been designed with a view to
image matching but are used in many different areas
of computer vision like object detection, video track-
ing and face recognition (Geng and Jiang, 2009; Du
et al., 2009). Both descriptors are invariant to scale
changes and rotation and their performance is com-
parable in many cases. SURF appears to be a more
preferable method as it is faster to compute and pro-
duces smaller feature vectors compared to SIFT.
While SIFT utilises local minima and maxima of a
Difference of Gaussians operator to detect key points,
SURF uses easier to compute Box Filters and inte-
gral images to further speed up the process. It should
be noted that there is also a U-SURF implementation
that interleaves the orientation assignment and leads
to more distinct features and faster computation times
though is no longer providing rotation invariance.
The SURF feature descriptor is created by rotating
the neighbourhood according to the calculated orien-
tation of the feature and then dividing this area into
4×4 square sub-regions. Then box filter responses
in horizontal and vertical direction at 5×5 equally
spaced sampling points within each of the sub-regions
are calculated. These responses and their absolute
values are summed up separately for each sub-region.
The 4-dimensional descriptor vectors of all 16 sub-
regions are concatenated and form a 64-dimensional
feature vector. The SIFT descriptor comprises of ap-
proximately the same number of features, however it
contains 8-bin histograms of gradient orientation per
sub-region resulting in a descriptor of 128 elements.
Another key point based approach that will
be evaluated is Oriented Fast and Rotated BRIEF
(ORB) (Rublee et al., 2011). This method is com-
posed of the FAST key point detector and BRIEF fea-
ture descriptor. FAST key-point detector counts the
number n of 16 consecutive pixels in a circular pat-
tern around the candidate that are brighter or darker
than the candidate by a certain threshold t. If n ≥ 12
the candidate is treated as a corner. The BRIEF de-
scriptor is a concatenation of the results of 256 bi-
nary tests. Each test is a comparison of the intensity
values of two pixels within a patch surrounding the
key point. To make the descriptor more robust against
noise and small rotations, the compared values are the
average of a 5×5 window around the test pixels.
3.2 Feature Matching
All key point based methods require a measure to
quantify the likeliness of two faces based on the re-
sults of the comparison of their key points. In contrast
to the methods described in Section 2 for key point
based methods there is no pair of equally sized de-
scriptors but two sets, generally containing a different
number of descriptors, to compare.
For the experiments performed the similarity of
the query face to each of the N faces in the database
is calculated as follows.
For every query face a set of I key points
K
Q
= {K
Q1
,K
Q2
,...,K
QI
} (1)
is detected and a feature descriptor D
Qi
is calculated
for every K
Qi
such that the descriptor set
D
Q
= {D
Q1
,D
Q2
,...,D
QI
} (2)
can be assumed to describe the face in all necessary
detail.
For every face k in the database a set of key points
K
k
and descriptors D
k
where k = 1. . . N are detected
and calculated using exactly the same methods. Let
J
k
= |K
k
| = |D
k
| be the number of key points in the
k-th image of the database.
The indices of the key point K
k
i
j
i
with the closest
match to the query key point Q
i
are given as:
(k
i
, j
i
) = arg min
k, j
kD
Qi
− D
kj
k (3)
These key points were determined using the
FLANN (Muja and Lowe, 2009) algorithm for SIFT
and SURF features and a Brute Force nearest neigh-
bour search for ORB. FLANN cannot be used for
ORB, as the Hamming distance has to be applied for
matching BRIEF descriptors.
To exclude randomly matched feature descriptors,
that do not belong to the same part of the face, the
image of the face is divided using a 3×3 grid pattern.
The resulting 9 subsets of pixels are defined as:
A
r,c
= {(x,y) :c− 1 ≤ x
a
3/w < c, and
r− 1 ≤ y
a
3/h < r}
(4)
RobustFaceRecognitionusingKey-pointDescriptors
449

(a) (b)
Figure 1: Matched (green) and un-matched (red) key points
in corresponding faces using the SURF descriptor. Fig-
ure (a) shows false matched key points (diagonals), that are
eliminated by matching only key points that belong to the
same sub-area of the images as can be seen in Figure (b).
Where w and h denote width and height of the im-
age in pixels, x = [0, 1,...,w−1] and y = [0,1,...,h−
1] represent the positions of one pixel in the image and
1 ≤ r,c ≤ 3 are the row and column within the grid.
The similarity for the k-th face in the database is now
defined as:
S
k
=
I
∑
i=1
δ
k,k
i
∑
r
∑
c
δ
K
k
i
j
i
(A
r,c
)δ
K
Qi
(A
r,c
)
(5)
Where δ
i, j
denotes the Kronecker delta function
and δ
x
0
(A) denotes the Dirac measure. The face with
the highest similarity is chosen as the correct match.
Figure 1 shows the matches before (a) and after (b)
the pruning based on Eq. 4.
4 EXPERIMENTAL STUDY
The aim of this experimental study is to test the de-
scribed face recognition method based on key points
(Section 3) together with the presented baseline face
recognition techniques (Section 2).
First, a set of experiments using non occluded im-
ages is performed in order to have baseline recog-
nition rates. Following, experiments with occluded
faces are carried out considering simulated and real
occlusions.
4.1 Experimental Setup
The experiments can be grouped as follows i) experi-
ments with non-occluded faces, ii) experiments with
simulated occlusions and iii) experiments with real
occlusions. These three groups of experiments are
carried out using each of the previously introduced
face recognition methods: key points, LGXP, LBP
and Eigenfaces. Before carrying out all these experi-
ments, an experiment considering only non-occluded
faces is used to decide what type of key-point detector
and descriptor (SURF, SIFT or ORB) is more suitable
for the task.
For all the face recognition methods, except the
ones based on key points, the faces need to be aligned
so the facial features (eyes, nose and mouth) are ap-
proximately in the same location in all images. In
order to perform such alignment, the manually anno-
tated coordinates of the eyes, nose tip and mouth of
all images are requiered. Given the desired position
of the eyes, nose tip and mouth, a rigid transformation
is applied to the coordinates of those facial features in
each image to obtain the aligned face.
4.2 Face Image Data Sets
Two face image databases are used in the experi-
ments, those are FERET (Phillips et al., 1998; Phillips
et al., 2000) database and the AR (Martinez and Be-
navente, 1998) database.
The FERET database is one of the most widely
used databases for evaluating face recognition perfor-
mance. Different partitions of the database are pro-
vided with it, resulting in different data sets. For our
experiments the fa data set is used as the gallery set,
and the testing data sets are fb, dup1 and dup2.
The AR database consists of images taken from
126 individuals on 2 sessions with a separation of 14
days. As there are not available the same number of
images per subject, a subset of 50 female and 50 male
individuals is used. Out of the 13 images that were
captured per subject and session, only three images
of each session are used in this work: frontal face,
face with sunglasses and face with a scarf. For our
experiments, the non-occluded images of the first ses-
sion are used as the gallery set, and the testing datasets
are i) the non-occluded images of the second session,
ii) the images of the subjects wearing sunglasses from
both sessions, and iii) the images of the subjects wear-
ing a scarf from both sessions.
The performance of the different methods is tested
using the originally occluded data sets from the AR
database as well as simulated occlusions applied to
the FERET data sets (see Section 4.4). By perform-
ing the tests on both data sets, the performance with
respect to a controllable amount of simulated occlu-
sion can be tested and the findings can be supported
with more realistic conditions of the AR images.
4.3 Design Parameters
In this section the parameter settings for each of the
methods used in the experiments are indicated.
Key point based methods use the SURF, SIFT and
ORB implementations provided with the Open
Source Computer Vision library
1
(OpenCV). It is
1
OpenCV library is available online at http://opencv.org/
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
450

worth noting that these methods use no aligned
face images, however the location of the face in
the image needs to be detected. The well-known
Viola & Jones face detector (Viola and Jones,
2001) is used, with the implementation provided
with the OpenCV library.
LGXP method is based on the work by (Xie et al.,
2010). Hence, the values of the design parameters
are those given in that work. Although, the results
reported in that publication have not been repli-
cated, the recognition rates achieved with our im-
plementation are useful for comparing the perfor-
mance of this method under different conditions
tested in the experiments.
LBP method is based on regions of 9×9 pixels from
which LBPs are calculated taking 8 sample points
with a radius of 2 pixels. Each of the histograms
extracted from each region has 59 bins, since uni-
form LBPs are used (Ahonen et al., 2006).
Eigenfaces method is implemented using the default
parameters of the FaceRecognizer provided with
the OpenCV library.
Regarding the size of the images, the key point
based method uses the images as they are provided
in the face databases. For the other face recognition
methods the images from the FERET database are re-
sized to 80× 88 pixels following the recommendation
given in (Xie et al., 2010). However, an experiment
using larger image sizes is also perfomed in order to
check if the reduced size affects the recognition re-
sults. For the AR data sets the ready available set
of warped images (Martinez and Kak, 2001) is used,
each image has a size of 120× 165 pixels.
4.4 Simulated Occlusions
In order to have a controlled amount of occlusions
in the images, simulated occlusions were added to
the FERET data sets used for testing. These occlu-
sions were introduced randomly by replacing a square
shaped area of the detected face. To provide a more
realistic scenario the occlusions were not only black
or white masks, but taken from the Colored Brodatz
Texture database. The occluded images were created
by first detecting the face in the original FERET im-
age. A square shaped mask of 10% and 25% of the
size of the facial area was created by randomly select-
ing one of the 112 textures in the Brodatz database
and an equally sized area within each of the templates.
This area was then copied to a random position inside
the facial area of the FERET image. The process was
repeated 5 times and the reported results are averaged.
Table 1: Face recognition rates (%) over FERET data sets
achieved by different key-point methods.
SIFT SURF ORB
fb 93.75 97.88 81.15
dup1 52.31 57.61 29.48
dup2 44.30 52.63 21.93
Table 2: Face recognition rates (%) over FERET data sets
without occlusions. Images have been aligned and cropped
to 80× 88 pixels for LGXP, LBP and Eigenfaces methods.
SURF LGXP LBP Eigenfaces
fb 97.88 80.24 92.74 69.56
dup1 57.61 47.01 47.96 23.51
dup2 52.63 39.04 28.51 6.14
5 RESULTS
The evaluation of the tested face recognition meth-
ods is first performed using non-occluded data. The
results provide a certain level of confidence in the im-
plemented algorithms as they can be compared to for-
merly reported results. Those results are then com-
pared with the scaled simulated occlusion results and
verified using the results from real occlusions.
5.1 No Occlusions
Table 1 shows that on non-occluded faces of the
FERET database, the SURF descriptor performs as
expected based on the results formerly reported (Geng
and Jiang, 2009) the same applies to SIFT (Liu et al.,
2011). SURF constantly provides better results than
the other key point based descriptors, especially ORB
does not seem to be suited for face recognition, at
least for the given test environment. For this reason,
the results of SIFT and ORB will no longer be re-
ported for other tests.
Table 2 shows the results for all the described
methods on the same database. In this Table as well
as in Table 3, the SURF results are duplicated (from
Table 1) for reference only. The results for the LBP
algorithm are seconded by previously reported results
on the FERET images (Bereta et al., 2013; Yang and
Chen, 2013). On the used implementation of LGXP,
the performance achieved is worse than previously re-
ported (Xie et al., 2010).
It is worth highlighting at this point that images
of 80 × 88 pixels were used in order to follow the
same experimental setup as in (Xie et al., 2010). To
assess the influence of the comparatively small size
of the aligned images, a second experiment was per-
formed using larger images of 300 × 330 pixels (see
RobustFaceRecognitionusingKey-pointDescriptors
451
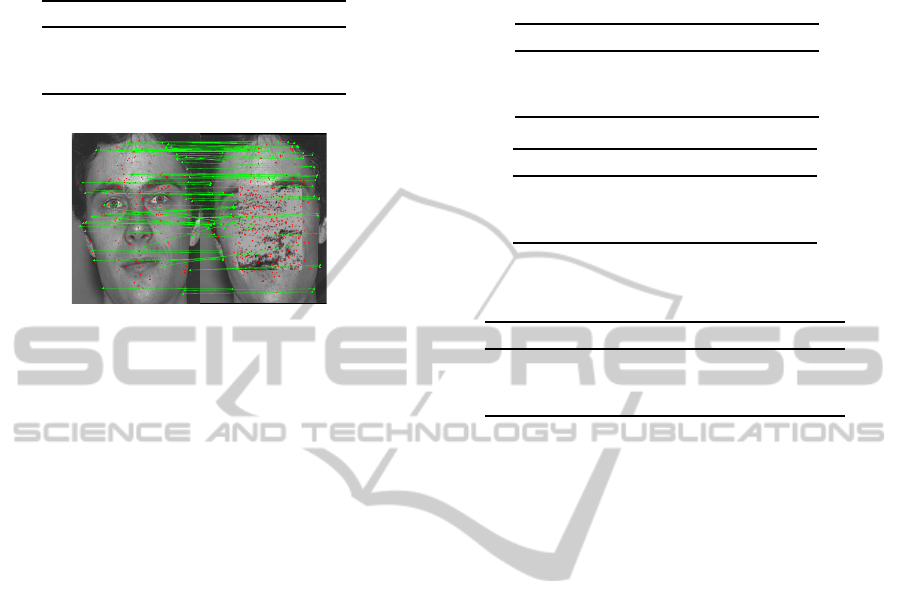
Table 3: Face recognition rates (%) over FERET data sets
without occlusions, but with images aligned and cropped to
300× 330 pixels for LGXP, LBP and Eigenfaces.
SURF LGXP LBP Eigenfaces
fb 97.88 93.65 82.16 69.46
dup1 57.61 52.17 51.22 23.37
dup2 52.63 41.23 48.25 5.70
Figure 2: Example of matched key points in a face with 25%
of simulated occlusion using the SURF descriptor. Despite
a few wrong matches, there is still enough information left
to recognise the subject correctly.
Table 3). While the change in size has no influence on
the results of the Eigenface descriptor, there is even a
decrease in the performance of the LBP method. It
should be noted, that SURF detection has not been
performed on resized images, therefore the figures
given in Table 3 are for reference only.
The additional image details due to the increased
resolution do not provide any significant changes to
the position of the image vectors in the PCA feature
space. Therefore, the separability of the classes does
not improve when using the Eigenfaces method.
LBP seems to benefit from the smaller image sizes
due to the noise reduction resulting from the subsam-
pling as it requires the application of a low-pass filter.
In contrast to LBP, the Gabor filter allows one feature
descriptor to cover multiple scales, therefore the re-
sults benefit from the greater detail but still cover an
area large enough to generate distinct features.
Nevertheless, it should be noted, that the SURF
descriptor performs best in all experiments without
occlusions. This does also include the robustness
against appearance changes, that can be observed by
the drop in recognition performance in between the fb
and dup2 data sets.
5.2 Simulated Occlusions
Table 4(a) and Figure 3(a) show the results obtained
on the fb FERET data set with 10% of simulated oc-
clusions. As those results confirm there is only a small
drop in recognition performancefor all methods when
the facial area is occluded. This is due to the high sim-
ilarity of the faces in both sets, that allows for a con-
Table 4: Face recognition rates (%) over FERET data sets
with artificial occlusions. Images have been aligned and
cropped to 80× 88 pixels for LGXP, LBP and Eigenfaces.
(a) 10% of occlusion
SURF LGXP LBP Eigenfaces
fb 96.31 70.16 86.05 53.31
dup1 51.11 36.11 45.92 16.68
dup2 40.18 29.91 27.98 4.56
(b) 25% of occlusion
SURF LGXP LBP Eigenfaces
fb 92.07 44.98 61.63 27.30
dup1 39.76 17.74 24.62 8.75
dup2 24.65 13.51 15.00 2.19
Table 5: Face recognition rates (%) over AR images without
and with real occlusions.
SURF LGXP LBP Eigenfaces
no occlusion 97.75 89.00 92.00 64.00
sunglasses 94.71 69.00 61.50 33.00
scarf 96.63 46.00 89.00 5.50
stant quality of the single features extracted from the
whole facial area. The experiments using the dup1
and dup2 (see Figure 3(b)) sets show a much larger
drop for all descriptors.
Table 4(b) shows the recognition rates obtained
for each of the methods when the occlusion is 25%
of the facial area. This is a more challenging task and
so the performances drop more significantly if com-
pared to the results using non-occluded images. How-
ever, the SURF method seems to be less affected than
the rest which could be due to the quality of the key-
point descriptors. As can be seen in Figure 2, which
depicts the matches of a non-occluded gallery image
against an image with 25% of occlusion, the number
of wrong matches to the occluded area is negligible.
Therefore, it can be assumed that there are enough
remaining matches to allow good results even when
25% of the facial area is occluded.
The performance of LBP in the fb tests shows the
lack of flexibility of the methods based on local de-
scriptors to deal with the loss of information. As the
occlusions are located randomly and the squares may
appear rotated in the aligned images the occlusions
degrade the information of a larger part of the his-
tograms than 25%. The same reasoning applies to the
LGXP descriptor.
As the occluded images are no longer in their ex-
pected subspace in the Eigenfaces feature space, the
projection vectors calculated by both methods do no
longer provide relevant features.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
452

0
20
40
60
80
100
none 10 % 25 %
Correct recognition %
amount of occlusion
(a) FERET fb data set
0
10
20
30
40
50
60
none 10 % 25 %
Correct recognition %
amount of occlusion
SURF
LGXP
LBPP
Eigenface
(b) FERET dup2 data set
0
20
40
60
80
100
none scarf sun glasses
Correct recognition %
(c) AR database
Figure 3: Average recognition performance of the tested
6 CONCLUSIONS
Figure 3: Average recognition performance of the tested
methods under different occlusions. The error bars indicate
the minimal and maximal performance achieved for the dif-
ferent versions of the occluded data sets.
5.3 Real Occlusions
The results shown in row 1 of Table 5 define a base-
line for the experiments with real occlusions. As can
be seen, they are comparable to the results of the fb
test set without any occlusions (Table 2). This is due
to the only 14 days difference in between the first and
the second session of the AR data gathering process.
The two types of occlusions in the AR sets appear
to be less challenging than the simulated occlusions.
The overall performance of all the descriptors is con-
firmed (see Table 5 and Figure 3(c)). However, when
looking at the recognition rates achieved by all the
methods, it seems that the key-point descriptor was
more robust than the rest, as there is no much drop
from the baseline results and those obtained with real
occlusions. In addition, the key-point method had
also an overall better performance. Regarding the
LGXP method, its performance over scarf images is
not as good as the performance over sunglasses oc-
clusions which seem counterintuitive as eyes tend to
provide more discriminant information than other ar-
eas of the face.
6 CONCLUSIONS
The experiments show that, although the recognition
rates of key point based face recognition methods are
slightly lower than reported results for Local Descrip-
tors (Bereta et al., 2013; Xie et al., 2010), they outper-
form the tested implementations when the faces are
partially occluded.
Furthermore, the use of key-point detectors makes
exact alignment redundant, which does not only elim-
inate the need for annotated data sets but also saves
time during the pre-processing stage of the recogni-
tion process.
Out of the tested range of key-point detectors
and descriptors, SURF appears to be the most suc-
cessful one. Not only does it show higher match-
ing speeds (Du et al., 2009) it does also outperform
the well known SIFT on the occluded faces of the
AR database. ORB does, in the described setup, not
achieve results that are comparable to the other meth-
ods. The same applies to the holistic method Eigen-
faces, that was not capable of delivering good perfor-
mance with partially occluded faces.
There are many possible ways to further increase
the performance of key point based face recognition
methods. The described matching method (Section
3.2) is very generic. It seems promising to use more
advanced methods (Geng and Jiang, 2009) or include
a bayesian approach for evaluating the strength of a
matched key point pair.
As face images can, in many cases, be assumed
to be roughly aligned along the vertical axis, the U-
SURF descriptor might deliver even better perfor-
mance than rotation invariant SURF.
In the area of binary descriptors, there are other
methods that show performance comparable to SIFT
when it comes to feature matching. A combination of
FAST detector and BRISK descriptor was reported to
perform very well (Bekele et al., 2013).
Finally, Gabor filters were able to increase the per-
formance in combination with LBPs (Bereta et al.,
2013; Xie et al., 2010) and have spatial locality, in
contrast to DFT or DCT, it seams reasonable to com-
bine them with key-point descriptor methods as well.
ACKNOWLEDGEMENTS
This work has been supported by the EU FP7 Project
SEMEOTICONS (Grant agreement no: 611516).
Portions of the research in this paper use the FERET
database of facial images collected under the FERET
program, sponsored by the DOD Counterdrug Tech-
nology Development Program Office.
RobustFaceRecognitionusingKey-pointDescriptors
453

REFERENCES
Ahonen, T., Hadid, A., and Pietikinen, M. (2006). Face
description with local binary patterns: Application to
face recognition. IEEE Trans. Pattern Anal. Mach.
Intell., 28:2037–2041.
Bartlett, M. S., Movellan, J. R., and Sejnowski, T. J. (2002).
Face recognition by independent component analysis.
IEEE Trans. Neural Networks, pages 1450–1464.
Bay, H., Ess, A., Tuytelaars, T., and van Gool, L. (2008).
Speeded-Up Robust Features (SURF). Computer Vi-
sion and Image Understanding, 110(3):346–359.
Bekele, D., Teutsch, M., and Schuchert, T. (2013). Evalua-
tion of binary keypoint descriptors. In IEEE Int. Conf.
Image Processing (ICIP), pages 3652–3656.
Belhumeur, P. N., Hespanha, J. P., and Kriegman, D. J.
(1997). Eigenfaces vs. Fisherfaces: recognition using
class specific linear projection. IEEE Trans. Pattern
Anal. Mach. Intell., 19(7):711–720.
Bereta, M., Pedrycz, W., and Reformat, M. (2013). Lo-
cal descriptors and similarity measures for frontal
face recognition: A comparative analysis. Journal
of Visual Communication and Image Representation,
24(8):1213–1231.
Chellappa, R., Wilson, C., and Sirohey, S. (1995). Human
and machine recognition of faces: a survey. Proc.
IEEE, 83(5):705–741.
Dreuw, P., Steingrube, P., Hanselmann, H., and Ney, H.
(2009). SURF-face: Face recognition under viewpoint
consistency constraints. In Proc. British Machine Vi-
sion Conf., pages 1–1.
Du, G., Su, F., Cai, A., Ding, M., Bhanu, B., Wahl, F. M.,
and Roberts, J. (2009). Face recognition using SURF
features. In SPIE Proc. Int. Symp. Multispectral Image
Proc. and Pattern Recog., pages 749628–1 – 7.
Geng, C. and Jiang, X. (2009). Face recognition using sift
features. In Image Processing (ICIP), 2009 16th IEEE
International Conference on, pages 3313–3316.
Jafri, R. and Arabnia, H. R. (2009). A Survey of Face
Recognition Techniques. Journal of Information Pro-
cessing Systems, 5(2):41–68.
Kisku, D. R., Gupta, P., and Sing, J. K. (2010). Face recog-
nition using sift descriptor under multiple paradigms
of graph similarity constraints. In Int. J. Multimedia
and Ubiquitous Engineering, volume 5, pages 1–18.
Kong, S. G., Heo, J., Abidi, B. R., Paik, J., and Abidi, M. A.
(2005). Recent advances in visual and infrared face
recognitiona review. Computer Vision and Image Un-
derstanding, 97(1):103 – 135.
Liu, N., Lai, J., and Qiu, H. (2011). Robust Face Recog-
nition by Sparse Local Features from a Single Image
under Occlusion. In Graphics (ICIG), pages 500–505.
Lowe, D. G. (2004). Distinctive Image Features from Scale-
Invariant Keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Luo, J., Ma, Y., Takikawa, E., Lao, S., Kawade, M., and
Lu, B.-L. (2007). Person-specific sift features for face
recognition. In Int. Conf. Acoustics, Speech and Sig-
nal Processing, volume 2, pages II–593–II–596.
Martinez, A. and Benavente, R. (1998). The AR Face
Database: CVC Technical Report #24.
Martinez, A. M. and Kak, A. C. (2001). PCA versus LDA.
IEEE Trans. Pattern Anal. Mach. Intell., 23(2):228–
233.
Muja, M. and Lowe, D. G. (2009). Fast approximate near-
est neighbors with automatic algorithm configuration.
In In VISAPP International Conference on Computer
Vision Theory and Applications, pages 331–340.
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution grayscale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
Pattern Anal. Mach. Intell., pages 971–987.
Phillips, P. J., Hyeonjoon Moon, Rizvi, S. A., and Rauss,
P. J. (2000). The FERET evaluation methodology
for face-recognition algorithms. IEEE Trans. Pattern
Anal. Mach. Intell., 22(10):1090–1104.
Phillips, P. J., Wechsler, H., Huang, J., and Rauss, P. J.
(1998). The FERET database and evaluation proce-
dure for face-recognition algorithms. Image and Vi-
sion Computing, 16(5):295–306.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). ORB: An efficient alternative to SIFT or
SURF. In Int. Conf. Computer Vision, pages 2564–
2571.
Sirovich, L. and Kirby, M. (1987). Low-dimensional proce-
dure for the characterization of human faces. Journal
of the Optical Society of America A, 4(3):519.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Computer
Vision and Pattern Recognition., pages I–511–I–518.
Xie, S., Shan, S., Chen, X., and Chen, J. (2010). Fus-
ing Local Patterns of Gabor Magnitude and Phase for
Face Recognition. IEEE Trans. Image Processing,
19(5):1349–1361.
Yang, B. and Chen, S. (2013). A comparative study on
local binary pattern (LBP) based face recognition:
LBP histogram versus LBP image. Neurocomputing,
120:365–379.
Yang, J., Zhang, D., Frangi, A. F., and Yang, J. (2004). Two-
dimensional PCA: A new approach to appearance-
based face representation and recognition. IEEE
Trans. Pattern Anal. Mach. Intell., 26(1):131–137.
Zhang, X. and Gao, Y. (2009). Face recognition across pose:
A review. Pattern Recognition, 42(11):2876 – 2896.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
454
