
An Interactive Visualization System for Huge Architectural Laser Scans
Thomas Kanzok
1
, Lars Linsen
2
and Paul Rosenthal
1
1
Department of Computer Science, Technische Universit
¨
at Chemnitz, Chemnitz, Germany
2
Jacobs University, Bremen, Germany
Keywords:
Point Clouds, Out of Core, Level of Detail, Interactive Rendering.
Abstract:
This paper describes a system for rendering large (billions of points) point clouds using a strict level-of-
detail criterion for managing the data out of core. The system is comprised of an in-core data structure for
managing the coarse hierarchy, an out-of-core structure for managing the actual data and a multithreaded
rendering framework that handles the structure and is responsible for data caching, LOD-calculations, culling,
and rendering. We demonstrate the performance of our approach with two real-world datasets (a 1.8 b points
outdoor scene and a 360 m points indoor scene).
1 INTRODUCTION
Due to the falling prices in the market for 3D scanning
devices, especially for terrestrial laser scanners, it has
become viable for small to middle sized companies to
afford the devices themselves or hire a contractor to
have objects scanned for them. In the field of civil en-
gineering in particular a rising popularity of 3D scan-
ning for building documentation can be witnessed at
the moment. However, currently available software
has still not fully solved the problems that arise with
the growth of the produced datasets that can go well
into the gigabytes of binary data.
However, for working with the data not everything
has to be loaded from the disk at once, since parts of
the model will probably not be visible anyways while
other parts are too far away to perceive details. The
key for dealing with this amount of data is to parti-
tion the data conveniently so that invisible parts can
be omitted (culling) while visible parts can be ren-
dered with respect to the actual visible level of detail
(LOD).
Finding an appropriate partitioning of the data that
allows for such algorithms while making best use
of the available hardware, especially the GPUs, has
been an intensively studied field since the turn of the
millennium. In recent years the mark of billions of
points has been broken (Elseberg et al., 2013) and the
amounts of data are still rising.
In this paper we present our rendering system for
point clouds that has been tested to work with data
sizes of several billions of points. In order to deal with
this data we had to implement a system that handles
the data out of core, i.e. mostly stored on a hard drive
and only partially resident in RAM or GPU-memory.
Making use of the widespread multicore CPUs we de-
veloped a framework that is able to handle all man-
agement of the structure in parallel without interfer-
ing with the actual interactive rendering. This is not
possible without:
• A space partitioning structure that incorporates hi-
erarchical levels of detail.
• An accurate LOD-estimation scheme.
• A parallel framework that distributes independent
tasks over the available CPU cores.
The paper will mainly give insight into the developed
rendering architecture, but also provide the reader
with enough information to comprehend the under-
lying concepts.
2 RELATED WORK
Investigations of point based rendering have be-
gun long before the widespread use of 3D-scanning
for data acquisition (Levoy and Whitted, 1985),
but gained real drive with the Digital Michelangelo
Project (Levoy, 1999), during which the first prac-
tically applicable rendering system for large point
clouds was developed (Rusinkiewicz and Levoy,
2000).
Since then several improvements regarding ren-
dering quality (Botsch and Kobbelt, 2003; Botsch
265
Kanzok T., Linsen L. and Rosenthal P..
An Interactive Visualization System for Huge Architectural Laser Scans.
DOI: 10.5220/0005315202650273
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 265-273
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

et al., 2004; Zwicker et al., 2004) and efficiency have
been suggested. Due to the falling prices of increas-
ingly accurate and fast scanning hardware the sizes of
generated datasets have risen drastically and are cur-
rently lying in regions above the billions.
To handle these amounts of data multiple ap-
proaches were published that use different methods to
subdivide the data into a manageable hierarchy (usu-
ally a tree) that allows rendering of hierarchy nodes
with a level-of-detail (LOD) that scales with the ap-
parent size of the node on the screen. This is only
possible if every non-leaf node provides a coarse rep-
resentation of the data that itself and all its children
contain. Previously coarser levels were generated as
the average of finer levels (Rusinkiewicz and Levoy,
2000) but since the publication of Sequential Point
Trees (SPTs) (Dachsbacher et al., 2003) the paradigm
of using ”representative points”, i.e. points that are
a good approximation of a larger set, from fine lay-
ers to create a coarser structure has gained popularity.
Since the original SPTs had to be stored in RAM to be
renderable, they were extended to an out-of-core vari-
ant using nested octrees (Wimmer and Scheiblauer,
2006). Another way to organize points is to handle
them in ”layers” (Gobbetti and Marton, 2004) that
are sorted in a kD-tree manner or to store the data
in the leaves of a kD-tree-like structure (Goswami
et al., 2013) (hence the name ”layered point trees”, or
LPTs). kD-trees have the advantage of allowing for
equally-sized nodes, but have to be reorganized when
changes to the data are made, which is much easier
when using octree-structures.
Although the discussed approaches seem to of-
fer reasonable performance for large datasets they
have certain drawbacks that do not map well to cur-
rent hardware. The SPT-approach is based on a
per-object sorting and therefore does not allow for
culling and fine-grained LOD calculations. This can
be done much better in the LPT-Framework, which is
also nicely suited for GPU rendering. However, the
trees rely on a uniform point distribution, as already
pointed out by the authors, which can not be guaran-
teed in real world scans. Both concerns are addressed
by the nested-octree-approach. However, their er-
ror metric is very coarse and does not account for
flat nodes perpendicular to the viewer, which could
be drawn with considerably fewer points than a cube
that is homogenously filled with the same amount of
points. Last but not least, most of the mentioned pa-
pers are especially focused on the used data structure
and hardly discuss the rendering framework around it.
This paper shall not only give the reader insights
into the used data management but also explain how
to integrate the data model into a working rendering
framework.
3 GENERAL APPROACH
Our approach makes use of the parallelism of modern
GPUs and CPUs by offloading all management efforts
to the CPU, leaving the GPU to the task it is best
suited for – rendering. Our main contributions are
a crisp LOD mechanism that includes depth culling
and a parallel out-of-core rendering framework that
allows us to render billions of points in an interactive
way.
The design goal for our data structure was to find a
representation of a point cloud that has the following
key features:
1. Out-of-core management of point data, this im-
plies a hierarchical organization.
2. Fine-grained way of selecting a level of detail for
the nodes in the hierarchy.
3. GPU-friendly layout of the hierarchy layers.
The data structure we used to achieve this
goal is inspired by the work of Wimmer and
Scheiblauer (Wimmer and Scheiblauer, 2006). In
contrast to them however, our data is not as tightly
nested in order to allow for batch rendering, as we
will see in the following section. The parallel render-
ing architecture is described in the section after that.
3.1 Data Structure
The data structure of our system is comprised of an
outer structure which is used for calculating a node-
wise LOD and an inner structure which enables the
selection of representative points for the calculated
LOD. The outer structure is designed in a way that al-
lows it to always be completely held in CPU-memory.
It is used for LOD calculation and all implemented
culling mechanisms whereas the inner structure gets
loaded into a vertex buffer object (VBO) from a hard
drive on demand and is used for the actual rendering.
Similar to nested point trees (Wimmer and
Scheiblauer, 2006), our outer structure is an octree
that is used to cut the data into convenient chunks,
each node completely encompassing all of its chil-
dren. The data structure is built top down, starting
with a cubic root node that contains all available data
and is then recursively split into its children while
retaining a number of ”representative points” in the
node.
Those points are chosen using an adaptive n-Tree,
where n is chosen based on the local dimensionality
of the node’s data (see Equation 3.1), meaning the tree
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
266
will be binary if the data is distributed along a line,
a quadtree if the data is planar and an octree if the
data spans a volume. The created tree is adaptive in
that it can be given a number of target points to store
and it will keep a homogeneous point distribution by
contracting leaf nodes with higher depth when a node
with lower depth is to be split and the tree would oth-
erwise exceed its capacity. Node capacity will usu-
ally be given by a target GPU buffer size, which will
let every node have either almost the same amount of
points (for uncompressed data) or a number of points
that depends on the compression factor of the node
(see Section 5).
For determining the local dimensionality of a node
we use a criterion introduced by Westin et al. (Westin
et al., 1997), that is an anisotropy value
c
a
= c
l
+ c
p
=
λ
1
+ λ
2
− 2λ
3
λ
1
+ λ
2
+ λ
3
= 1 − c
s
; (1)
defined by the eigenvalues of λ
1
, λ
2
, λ
3
of the covari-
ance matrix of all the points in the node. Here c
l
, c
p
and c
s
; c
l
+c
p
+c
s
= 1 describe the linearity, planarity
and ”sphericality” of the node:
c
l
=
λ
1
− λ
2
λ
1
+ λ
2
+ λ
3
;c
p
=
2(λ
2
− λ
3
)
λ
1
+ λ
2
+ λ
3
;c
s
=
3λ
3
λ
1
+ λ
2
+ λ
3
.
The values of c
l
, c
p
and c
s
form barycentric coor-
dinates which facilitate a good estimation of planarity
and linearity of a node.
The strict division between structure and data
makes it easy to store the management data of the
whole tree in RAM (for reasonable choices for the
number of points, see Table 1). This will be conve-
nient later for our rendering architecture.
Table 1: The generated number of tree nodes for three target
node sizes (in points per node, ppn) using our test datasets
of 1.8 billion and 367 million points. We assume that node
sizes smaller than 2
12
= 4096 points are not practical any-
more, since the used VBOs would become much smaller
than 100 kb. The values represent the uncompressed case.
With compression the structure gets smaller.
# points ppn nodes structure size
1.8 billion 2
15
115498 20.26 MB
2
16
56430 9.90 MB
2
17
28642 5.03 MB
367 million 2
15
32120 5.64 MB
2
16
11824 2.07 MB
2
17
5612 0.98 MB
Nested in the outer structure are abstraction lay-
ers of the point cloud that can essentially be seen as
the layers of Gobbetti and Marton’s Layered Point
Clouds (Gobbetti and Marton, 2004) without the strict
binary balanced subdivision, which we abandoned to
overcome their dependence on homogeneous point
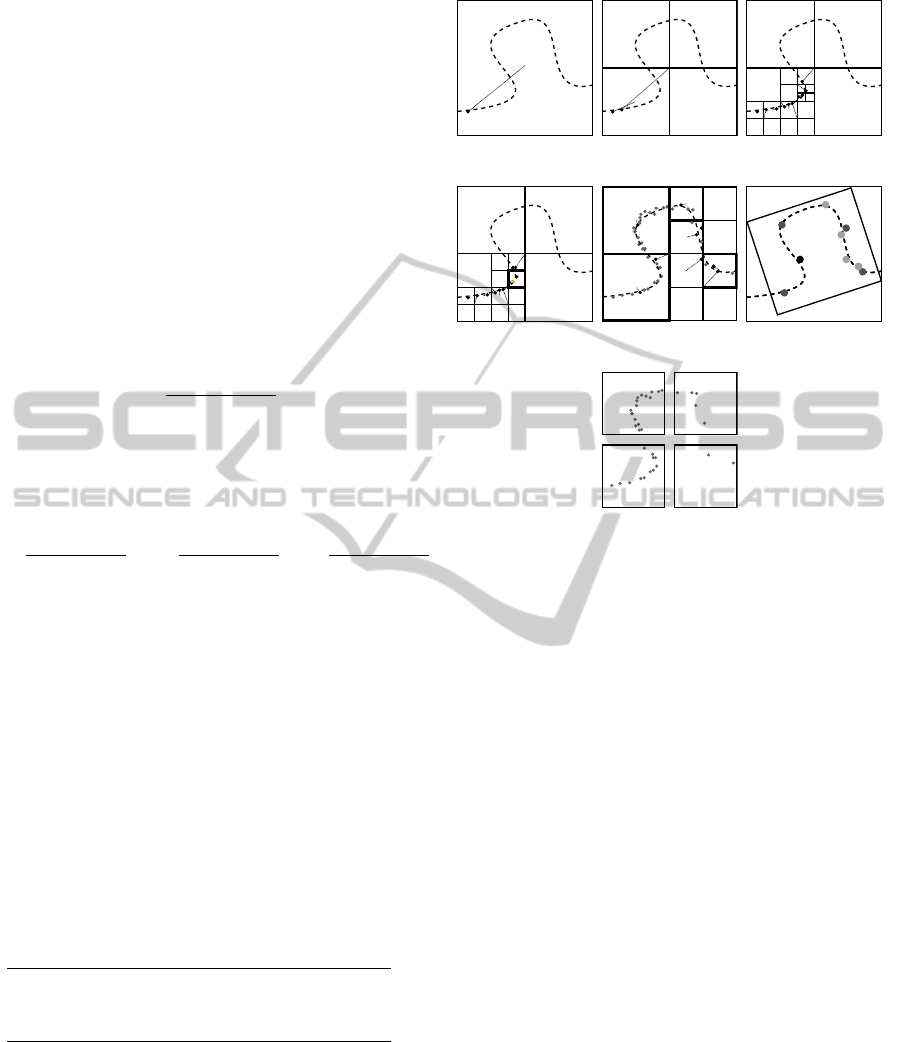
(a) (b) (c)
(d) (e) (f)
(g)
Figure 1: An example for our tree creation process; Each
node holds a reference (shown as a line to the center) to a
representative point, i.e. the point that is currently closest to
the center of the node (a). During tree buildup this reference
can be updated and the tree will be split (b) until the maxi-
mum capacity is reached (10 in this example, (c)). When we
now want to insert a new point first the children of the low-
est node are contracted, which propagates the blue point to
the appropriate child in the outer tree. Insertion of the new
node also replaced a representant, making the orange point
also obsolete. The contracted node is marked and may never
be expanded again (bold border) (d). After all points are in-
serted (e) representants for the nodes are sampled homoge-
nously over the data set. A level-order traversal yields the
LOD representation (f), which gets assigned a contour that
takes into account the possible approximation error. The
unused points are inserted into the children of the outer tree
(g).
distribution. We are organizing the points by a
level-order traversal of the previously created adap-
tive n-tree, which enables us to select which points
to render based on their by their ”visual importance”
(see (Dachsbacher et al., 2003)).
Finally the tree nodes get assigned a contour sim-
ilar to the one used by Laine and Karras (Laine and
Karras, 2011). This contour is either the oriented
bounding box of each node with respect to the points
that are stored in the node itself (when the node is
flat enough) or the axis-parallel bounding box of the
node computed during tree construction. We decide
whether a node is ”flat enough” based on the local di-
mensionality (see Equation 3.1). Thresholds of 0.03
AnInteractiveVisualizationSystemforHugeArchitecturalLaserScans
267
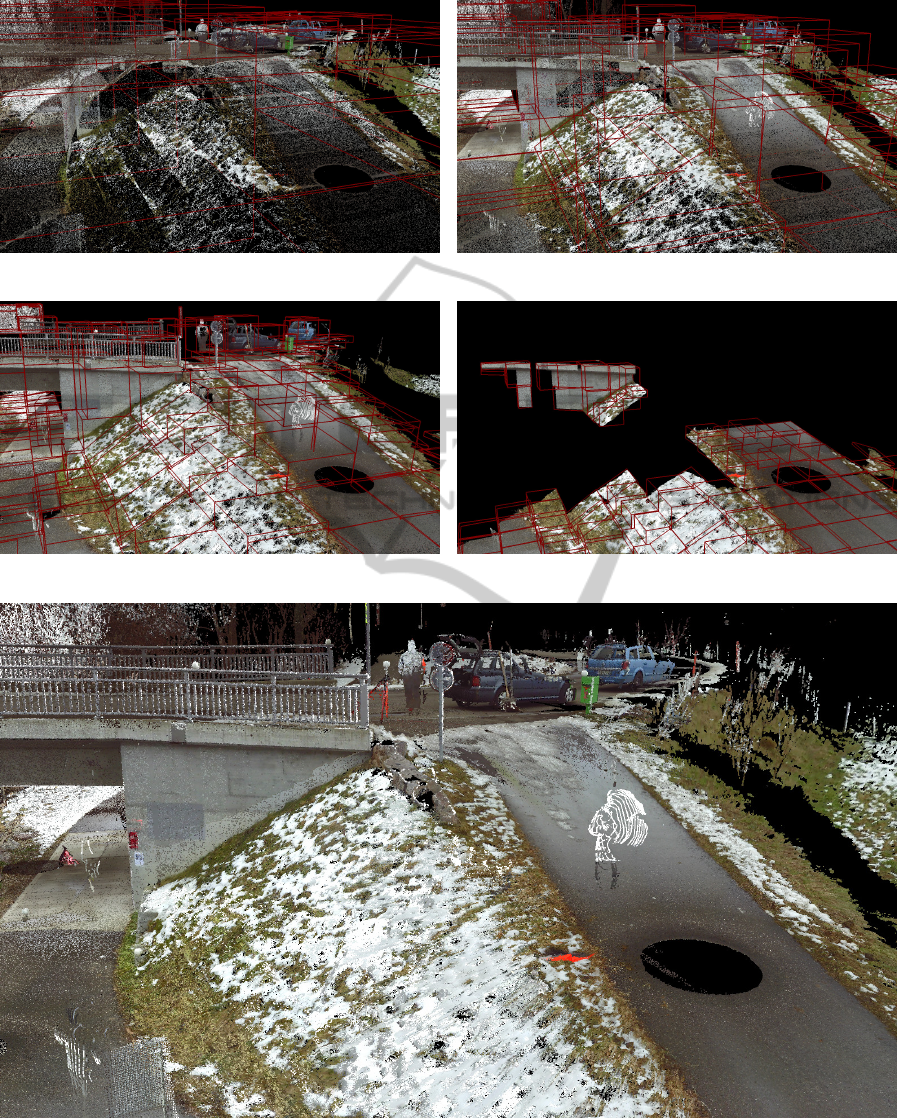
(a) Level 3 (b) Level 2
(c) Level 1 (d) Level 0
(e) Combined View
Figure 2: The layer structure of our tree contributes some points from each layer (top) to the final rendering (bottom). Note
that some of the bounding volumes are aligned to the geometry, others are not. This is the result of our anisotropy estimator
(Equation 3.1), which allows for a very fine-grained LOD calculation as seen in (d), where nodes on the bridge’s wall are
rendered although parts of the flat hillside perpendicular to the viewer are already left out. (The highest levels 9 to 4 were
omitted for brevity.)
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
268

have shown to provide a good distinction, leading to
the classification of a node as
Volumetric ⇔ c
s
> 0.03 or
Planar ⇔ c
p
> 0.03 or
Linear else
Having computed the contours for each node we
encode them as the principal axes of the node and
store everything to a file. The amount of stored data
sums up to a maximum of 184 bytes per tree node that
have to be stored in memory. As we can see in Table 1
this should not pose any serious limitation for today’s
computers.
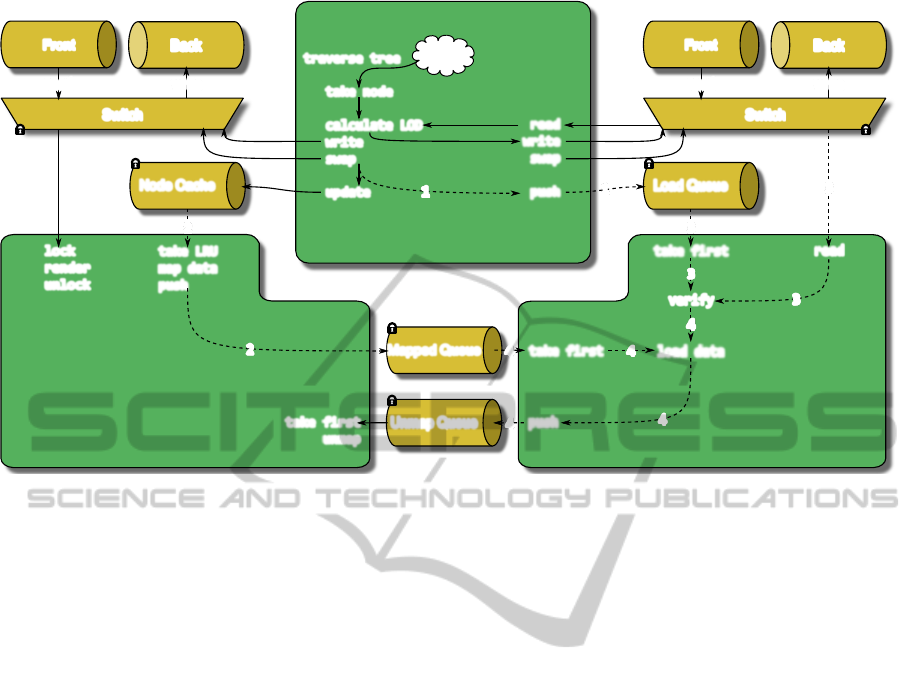
3.2 Rendering Architecture
When rendering our structure we use multiple CPU-
cores to relieve the GPU from any task except the one
it was designed to do best – transforming and raster-
izing primitives. Basically we are using three paral-
lel threads that are working together: an LOD thread
that is responsible for calculating the node’s apparent
size (the level of detail – LOD) and culling invisible
nodes, a loader thread that is responsible for loading
data from the hard drive, and a rendering thread that
takes the visible nodes and their LOD and initiates
rendering of the respective Vertex Buffer Objects (see
Figure 3). This thread is additionally responsible for
mapping and unmapping buffers, since it is the one
that ”owns” the OpenGL context. This approach is
not unlike the one described by Corr
ˆ
ea et al. (Corr
ˆ
ea
et al., 2002), but includes a layering- and LOD mech-
anism and is tailored towards optimal buffer usage on
modern GPUs.
3.2.1 Management Structures
The three threads need six core structures in order to
distribute their results among each other. These struc-
tures – which are prone to synchronization issues and
have to be guarded carefully – are:
1. The tree itself and the nodes therein
2. Two rendering lists that store structures necessary
for rendering. One is used for writing into by the
LOD thread (”back”) and one that is read from by
the rendering thread (”front”).
3. A prioritized load queue to which the LOD thread
pushes nodes that have to be loaded and from
which the loader thread pops its appropriate tar-
gets.
4. Two coarse (128×128 pixels) depth buffers, again
one back- and one front buffer for occlusion
culling.
5. A hierarchical node cache that keeps track of a
timestamp for each node that has been used for
actual rendering in order to find the least recently
used one for data loading when we have reached
our memory limit.
6. A map queue and an unmap queue for manag-
ing VBOs that are currently mapped for writing
or were recently written by the loader thread and
are now ready for unmapping.
The last two queues have to be managed by the
rendering thread because this thread is associated with
the GL context and therefore the only one that can
issue GL commands for mapping and unmapping of
buffer memory (Hrabcak and Masserann, 2012).
3.2.2 LOD Thread
The LOD thread is responsible for maintaining a list
of visible nodes that can be read by the rendering
thread to draw the respective Buffer Objects. While
the software is running this thread goes through the
hierarchy repeatedly and calculates the projected size
of a node’s contour on the screen. In order to do this
as strictly as possible we are transforming the con-
tour of each node to screen coordinates in software
while performing frustum culling. Additionally we
are using our coarse depth buffer to perform occlu-
sion culling. The depth test is done by rasterizing the
node’s contours in software using a parallel coverage-
based rasterizer similar to (Pineda, 1988). We decided
against a hardware-based occlusion culling (Bittner
et al., 2004) because we wanted to unload the GPU
from any tasks except rendering and we assume that
current and coming CPUs will have enough cores
to accomplish this task. For each node that passes
through these stages we can calculate its projected
size on the screen and use this value as the LOD for
this node.
We now have to check whether the node’s data is
already loaded from the HDD, in which case we can
append its required rendering data (VBO Id, LOD, in-
ternal GL type) to the rendering queue. If no data is
loaded yet for this node we calculate a priority value
based on the distance of the node from the viewer (to
start filling the space close to the viewer) and push the
node to the load queue.
When the LOD thread has finished the two ren-
dering lists and the two depth buffers are swapped the
thread begins anew from the root node. Care has to
be taken to avoid synchronization issues with the re-
sources shared between the threads, a schematic im-
age of the whole architecture including the necessary
locks can be found in Figure 3.
AnInteractiveVisualizationSystemforHugeArchitecturalLaserScans
269
read
write
Front
Back
Switch
Rendering Queues
read
write
Front
Back
Switch
Depth Buffers
Load QueueNode Cache
Mapped Queue
Unmap Queue
Tree
LOD Thread
Rendering Thread
Loader Thread
traverse tree
take node
calculate LOD
write
swap
update
read
write
swap
push
lock
render
unlock
take LRU
map data
push
take first
unmap
1
1
2
2
3
take first
push
take first
load data
read
verify
3
3
4
4
4
4
4
3
Figure 3: Overview of the data structures used by our rendering architecture. Detailed descriptions of the behavior of the
threads can be found in the respective sections. The dashed parts are only carried out when their respective conditions are
met: (1) A node is visible but not loaded (2) The mapped queue is not full (3) The load queue is not empty (4) The node is
still visible.
3.2.3 Loader Thread
Whenever the load queue is not empty the loader
thread takes the top node from the load queue, re-
moves it from the queue and again performs the oc-
clusion and frustum checks allready described for the
LOD thread. This avoids unnecessary HDD accesses
to load nodes that are not even visible anymore be-
cause the user has lost them from his view in the
meantime. If the node is still visible the thread gets
a pointer to mapped memory from the list of mapped
buffers and loads the data into the buffer (This ap-
proach is inspired by Hrabcak and Masseran’s inves-
tigations on asynchronous buffer transfers (Hrabcak
and Masserann, 2012)). When this is done it pushes
the node to the rendering threads unmap queue and
tries to read the next node.
3.2.4 Rendering Thread
This thread is responsible for displaying the data in
the given LOD. The front rendering list that was pre-
viously filled by the LOD thread is now processed by
issuing a draw call for each VBO in the list. Prior to
that the thread has also to take care of unmapping all
recently loaded nodes from the mapped queue and of
assuring that the map queue is filled with pointers to
memory usable for the loader thread.
Currently, the two queues have a fixed size of 5
buffers. In order to keep the mapped queue filled the
rendering thread requests up to 5 recently used nodes
from the cache, maps their associated buffers to RAM
and marks the nodes as ”not loaded”. Based on our
experiments we concluded that a cache size of 2000
nodes suffices to have all visible nodes loaded and still
have a reserve to map. This is of course dependent on
the number of points stored per node and will proba-
bly not be enough when sizes smaller than in Table 3
are used, but we do not think that using yet smaller
nodes would be beneficial under any circumstances.
The actual rendering in our system uses a color-
and a geometry-buffer as described by Saito et
al. (Saito and Takahashi, 1990) to enable deferred
shading and to estimate the necessary normals in
image space, should none be given in the data.
Optionally we support a splatting approach similar
to (Preiner et al., 2012) to even out illumination in-
consistencies between different scans (Kanzok et al.,
2012).
3.2.5 Load Distribution
The LOD thread may not be much slower than the
rendering thread in order to keep up with the render-
ing. Since we are targeting at least 10 fps for our
application to be considered ”interactive” we have a
time of 100 ms available each frame for one run of
the threads.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
270

Table 2: The measured timings for different configurations
of visible nodes and visible points. As one can see the tim-
ings are sufficient for interactive rendering, however, the
bottleneck is the streaming of points from the HDD to the
GPU (see Section 4).
nodes points LOD (ms) Rendering (ms)
293 6.6 m 3.6 52.2
726 10.4 m 18.0 63.8
472 10.4 m 7.3 58.5
138 5.7 m 3.5 52.5
350 11.5 m 18.0 68.8
250 13.1 m 7.0 56.2
64 65.5 m 3.9 66.4
166 13.8 m 13.3 72.0
166 18.3 m 4.7 50.6
We can see in Table 2 that this aim can be achieved
in most configurations. The loader thread is not criti-
cal in this respect since it only ever takes one node,
loads it and signals it back to the rendering thread
which in turn unmaps the buffer and renders the node.
This achieves an implicit synchronization between the
two threads, at least at a per-node level.
4 RESULTS & DISCUSSION
The choice for the number of representants k of a
node has severe implications for VBO-size, manage-
ment overhead, and streaming efficiency. We used
two datasets to investigate the effects of node sizes on
these factors, both generated by laser scanning real
world scenes: one outdoor scene of a bridge with
slightly over 1.8 b points and one indoor scene of a
small office with just above 360 m points. While the
indoor scene had lots of occlusion due to multiple
walls it was considerably smaller. The outdoor scene
on the other hand had extremely dense areas (see e.g.
Figure 4c) but much less occlusion. The experiments
were carried out on a workstation PC with an Intel
Core i7 CPU running Windows 7 64bit and a GeForce
GTX 680 GPU with 2048MB DDR5 memory.
We carried out different experiments to determine
the optimal node size and the best VBO usage strat-
egy in terms of loading and rendering speed. To as-
sure that no caching effects of the operating system or
the hard drive would skew the results we made sure
that no dataset was used twice in succession. The
timings taken for the frames per second were aver-
aged over 5 seconds for each view. The views were
chosen with respect to typical applications. For the
outdoor scene we have one overview over the whole
scene, one closeup view as it could occur when flying
through the data or measuring and one detail view that
makes full use of the detail level in the data. Similarly
the views for the office were chosen (Figure 4).
The experiments, summarized in Table 3, have
shown that neither the LOD-calculation including
software-rasterization for the occlusion test nor the
actual rendering speed are seriously limiting the in-
teractivity of the application.
With a worst case of eight frames per second ren-
dering speed we are always able to navigate the scene
without very noticeable stuttering, especially since
the drop in framerate only occurred when viewing ex-
tremely dense areas as seen in Figure 4c. At the mo-
ment the only issue is the time necessary to stream
new data from the harddrive to the GPU. However,
since rendering and interaction are not bound to the
speed of the loader thread, navigating the scene al-
ways stays possible and thanks to the layered struc-
ture of our data the user always has enough informa-
tion about his environment to keep working with the
data.
In terms of the most efficient node (and accord-
ingly VBO) sizes we can draw the following conclu-
sions from our experiments:
1. More points per node lead to less visible nodes
in the scene and to slightly shorter loading times.
This comes at the price of more points that have
to be drawn in each frame, because the coarser
the structure gets, the more difficult it becomes to
calculate a precise LOD for a node.
2. Fewer points per node allow for a more precise
LOD-calculation which leads to higher fps. How-
ever, the number of visible nodes can get very
high which has to be taken into account when de-
signing the cache.
As it is we tend to prefer the medium size of 65536
points per node. At this size our binary point data
amounts to exactly 1.5 MB per node, which fits nicely
into a VBO and it seems to offer the best compromise
between loading and rendering speed.
5 CONCLUSIONS
We have presented an out of core rendering frame-
work for large point models that efficiently distributes
the main tasks over the cores of the CPU. The GPU
is therefore free to handle the actual rendering of the
points. Experiments with two real world datasets have
shown the capability of the system to cope with huge
a amount of data. A remaining issue is the optimiza-
tion of streaming efficiency from HDD to GPU. This
could be mitigated by compressing the data in the fol-
lowing form:
AnInteractiveVisualizationSystemforHugeArchitecturalLaserScans
271
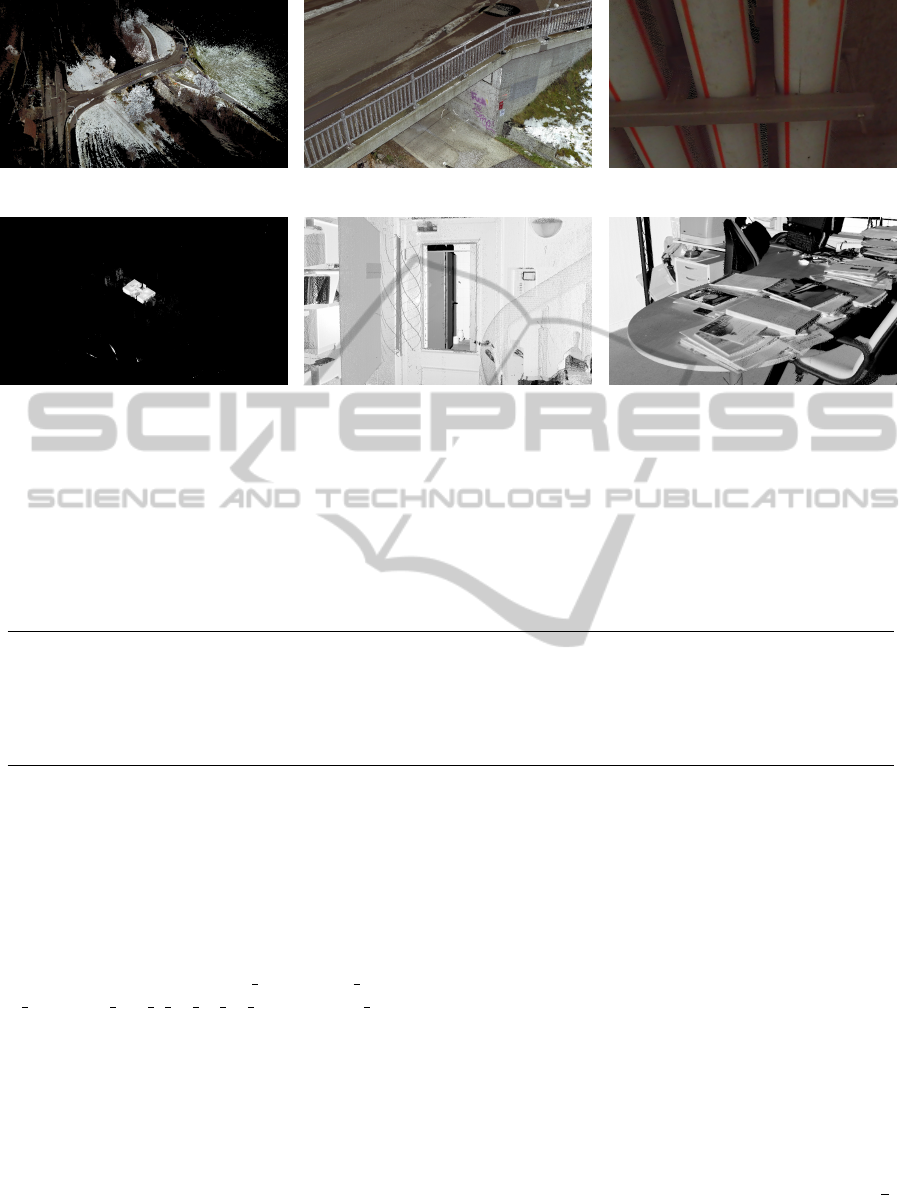
(a) Overview (b) Close View (c) Detail View
(d) Overview (e) Close View (f) Detail View
Figure 4: The three views in each two datasets used for the comparison in Table 3. The bridge was viewed from far and near
above (a and b) and from below (c). The office was viewed from above (a), from the entrance (b) and on an actual desk inside
(c). Navigation from one point to another can happen smoothly and without stalling due to the external handling of node
loading and LOD-calculation.
Table 3: The table shows the number of nodes and points that are rendered for the respective views as well as the times taken
until the view was completely loaded (under the transition-arrows). The node sizes used where 32768, 65536 and 131072
points per node (ppn). The worst configurations are emphasized in bold.
ppn # visible Overview loading Close View loading Detail View
nodes points fps → nodes points fps → nodes points fps
2
15
with z-test 294 6.7 m 19 11.8 s 923 17.7 m 14 4.9 s 452 11.8 m 17
w/o z-test 298 6.7 m 19 19.0 s 1304 22.5 m 11 4.8 s 481 12.7 m 16
2
16
with z-test 183 7.8 m 15 7.6 s 469 19.6 m 13 3.4 s 235 14.0 m 24
w/o z-test 197 8.0 m 16 11.9 s 661 25.3 m 10 3.8 s 261 15.5 m 15
2
17
with z-test 89 9.1 m 10 7.4 s 257 21.8 m 12 3.9 s 161 18.6 m 14
w/o z-test 89 9.1 m 12 11.6 s 388 30.0 m 10 4.7 s 175 20.2 m 13
2
15
with z-test 26 736 k 56 8.1 s 846 18.7 m 16 0.9 s 107 3.5 m 49
w/o z-test 26 764 k 56 33.0 s 1910 36.7 m 8 0.6 s 109 3.5 m 57
2
16
with z-test 19 1.0 m 54 7.0 s 452 23.3 m 16 1.1 s 79 5.1 m 51
w/o z-test 20 1.0 k 55 19.1 s 998 41.8 m 8 1.1 s 81 5.3 m 55
2
17
with z-test 22 631 k 57 10.9 s 798 20.5 m 18 0.8 s 53 1.7 m 58
w/o z-test 23 736 k 57 17.5 s 1106 26.4 m 15 0.8 s 57 1.8 m 57
Positions could be encoded as unsigned
integer coordinates corresponding to the
OpenGL data types GL UINT, GL USHORT,
GL UNSIGNED INT 2 10 10 10 REV and GL UBYTE,
making it possible to use 96, 48, 32 or 24 bits per
position. This does not reach the high compression
factors demonstrated by other researchers (e.g. (Chou
and Meng, 2002)), but lets us do the decompression
in specialized GPU hardware with nearly no overhead
and does not need connectivity information. Each
node stores the minimum of its octree-bounding
box o and a sampling resolution r that get passed
to the vertex shader as uniform, which will then
compute compute the actual vertex position x from
the compressed one
ˆ
x as follows:
x = o +
ˆ
x ◦ r, (2)
with ◦ denoting a component-wise multiplication.
The quantification of colours could be achieved
for example by simultaneously building a Kohonen
map (Boggess et al., 1994) from the point colours dur-
ing structure buildup, the normals can be quantised
according to a uniform distribution on the unit sphere.
This can be achieved by applying several Lloyd-
relaxations (Lloyd, 1982) to an energy-minimizing
pattern (Rakhmanov et al., 1994). According to our
calculations this could reduce the data size to
1
3
,
which would hopefully translate to the loading times
as well.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
272

Due to the hierarchical structure changes in data
size do not pose a problem for our approach. Pro-
cessing fewer points may improve performance, since
more points will fit in the cache minimizing loading
effort. Using more points will result in longer pre-
processing (O(n log n) due to the tree buildup), but
rendering performance should not be affected.
ACKNOWLEDGEMENTS
The authors would like to thank the enertec engineer-
ing AG (Winterthur, Switzerland) for providing us
with the data and for their close collaboration. This
work was partially funded by EUREKA Eurostars
(Project E!7001 ”enercloud - Instantaneous Visual In-
spection of High-resolution Engineering Construction
Scans”).
REFERENCES
Bittner, J., Wimmer, M., Piringer, H., and Purgathofer, W.
(2004). Coherent hierarchical culling: Hardware oc-
clusion queries made useful. Computer Graphics Fo-
rum, 23(3):615–624.
Boggess, J.E., I., Nation, P., and Harmon, M. (1994). Com-
pression of color information in digitized images us-
ing an artificial neural network. In Proc of NAECON,
pages 772–778 vol.2.
Botsch, M. and Kobbelt, L. (2003). High-quality point-
based rendering on modern GPUs. In Proc. on Pacific
Graphics, pages 335–343.
Botsch, M., Spernat, M., and Kobbelt, L. (2004). Phong
splatting. In Proc. of SPBG, pages 25–32.
Chou, P. and Meng, T. (2002). Vertex data compression
through vector quantization. IEEE Trans. Vis. & Com-
put. Graph., 8(4):373–382.
Corr
ˆ
ea, W. T., Klosowski, J. T., and Silva, C. T. (2002).
iwalk: Interactive out-of-core rendering of large mod-
els. Technical report, Technical Report TR-653-02,
Princeton University.
Dachsbacher, C., Vogelgsang, C., and Stamminger, M.
(2003). Sequential point trees. In Proc. of SIG-
GRAPH, SIGGRAPH ’03, pages 657–662, New York,
NY, USA. ACM.
Elseberg, J., Borrmann, D., and N
¨
uchter, A. (2013). One
billion points in the cloud an octree for efficient pro-
cessing of 3d laser scans. Journal of Photogrammetry
and Remote Sensing, 76(0):76 – 88.
Gobbetti, E. and Marton, F. (2004). Layered point clouds.
In Proc. of SPBG, SPBG’04, pages 113–120, Aire-la-
Ville, Switzerland, Switzerland. Eurographics Associ-
ation.
Goswami, P., Erol, F., Mukhi, R., Pajarola, R., and Gob-
betti, E. (2013). An efficient multi-resolution frame-
work for high quality interactive rendering of massive
point clouds using multi-way kd-trees. The Visual
Computer, 29(1):69–83.
Hrabcak, L. and Masserann, A. (2012). Asynchronous
buffer transfers. In Cozzi, P. and Riccio, C., edi-
tors, OpenGL Insights, pages 391–414. CRC Press.
http://www.openglinsights.com/.
Kanzok, T., Linsen, L., and Rosenthal, P. (2012). On-the-
fly Luminance Correction for Rendering of Inconsis-
tently Lit Point Clouds. Journal of WSCG, 20(2):161
– 169.
Laine, S. and Karras, T. (2011). Efficient sparse voxel oc-
trees. IEEE Trans. Vis. & Comp. Graph., 17(8):1048–
1059.
Levoy, M. (1999). The digital michelangelo project. In
Proc. on 3-D Digital Imaging and Modeling, pages 2–
11.
Levoy, M. and Whitted, T. (1985). The use of points as
a display primitive. Technical report, University of
North Carolina, Department of Computer Science.
Lloyd, S. (1982). Least squares quantization in pcm. IEEE
Trans. Inform. Theory, 28(2):129–137.
Pineda, J. (1988). A parallel algorithm for polygon ras-
terization. In Proc. of SIGGRAPH, SIGGRAPH ’88,
pages 17–20, New York, NY, USA. ACM.
Preiner, R., Jeschke, S., and Wimmer, M. (2012). Auto
splats: Dynamic point cloud visualization on the
GPU. In Proc. of EGPGV, pages 139–148.
Rakhmanov, E., Saff, E., and Zhou, Y. (1994). Minimal dis-
crete energy on the sphere. Math. Res. Lett, 1(6):647–
662.
Rusinkiewicz, S. and Levoy, M. (2000). Qsplat: A mul-
tiresolution point rendering system for large meshes.
In Proc. of SIGGRAPH, SIGGRAPH ’00, pages 343–
352, New York, NY, USA. ACM Press/Addison-
Wesley Publishing Co.
Saito, T. and Takahashi, T. (1990). Comprehensible ren-
dering of 3-d shapes. SIGGRAPH Comput. Graph.,
24(4):197–206.
Westin, C.-F., Peled, S., Gudbjartsson, H., Kikinis, R., and
Jolesz, F. A. (1997). Geometrical diffusion measures
for MRI from tensor basis analysis. In ISMRM ’97,
page 1742, Vancouver Canada.
Wimmer, M. and Scheiblauer, C. (2006). Instant points:
Fast rendering of unprocessed point clouds. In Proc.
of SPBG, SPBG’06, pages 129–137, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Zwicker, M., R
¨
as
¨
anen, J., Botsch, M., Dachsbacher, C.,
and Pauly, M. (2004). Perspective accurate splatting.
In Proc. of Graphics Interface, GI ’04, pages 247–
254, School of Computer Science, University of Wa-
terloo, Waterloo, Ontario, Canada. Canadian Human-
Computer Communications Society.
AnInteractiveVisualizationSystemforHugeArchitecturalLaserScans
273
