
Low Complexity Multi-object Tracking System Dealing with Occlusions
Aziz Dziri
1
, Marc Duranton
1
and Roland Chapuis
2
1
Embedded Computing Lab, CEA, LIST, F-91191 Gif-sur-Yvette, France
2
Institut PASCAL, Pascal Blaise University, 63171 Aubiere, France
Keywords:
GMPHD, Occlusion, Overlapping, Multi-object Tracking, Background Subtraction.
Abstract:
In this paper, we propose a vision tracking system primarily targeted for systems with low computing re-
sources. It is based on GMPHD filter and can deal with occlusion between objects. The proposed algorithm
is supposed to work in a node of camera network where the cost of the computer processing the information
is critical. To achieve a low computing complexity, a basic background subtraction algorithm combined with
a connected component analysis method are used to detect the objects of interest. GMPHD was improved
to detect occlusions between objects and to handle their identities once the occlusion ends. The occlusion
is detected using a low complexity distance criterion that takes into consideration the object’s bounding box.
When an occlusion is noticed, the features of the overlapped objects are saved. At the end of the overlapping,
the extracted features are compared to the current features of the objects to perform the object reidentification.
In our experiments two different features are tested: color histogram features and motion features. The exper-
iments are performed on two datasets: PETS2009 and CAVIAR. The obtained results show that our approach
ensures a high improvement of GMPHD filter and has a low computing complexity.
1 INTRODUCTION
Multi-object tracking is an important step for several
vision applications. It is often used in surveillance
applications for action recognition, behavior analy-
sis (Vezzani et al., 2013; Wang et al., 2003) and au-
tomatic traffic monitoring (Roller et al., 1993). The
multi-object tracking is also used in Advanced Driver
Assistance Systems (ADAS) (Lamard et al., 2012;
Geronimo et al., 2010). Multi-object tracking is a
challenging problem because of the varying number
of objects over time, illumination change, overlap-
ping between objects and varying appearance of ob-
jects (color, dynamic shape, ...). To solve this chal-
lenge several methods were developed and a detailed
survey can be found in (Yilmaz et al., 2006; Vezzani
et al., 2013).
Recently, the development of visual camera net-
work for surveillance applications is increasing and
the challenge to reduce the energy consumption of
these systems is becoming critical. The solution to
this problem is the reduction of the communication
cost between the nodes of the network and the use
of embedded calculators for information processing.
Embedded calculators consume less energy than PCs
but they are limited by their computing resources and
memory. For this reason, developing low complexity
algorithms is highly required. In this case, the best al-
gorithm is the one ensuring the best trade-off between
the tracking quality and the computing complexity.
Objects tracking algorithms can be classified into
three main categories (Yilmaz et al., 2006): point
tracking, kernel tracking and silhouette tracking.
Both, kernel tracking and silhouette tracking algo-
rithms use visual features (appearance model, con-
tour,...) to achieve the correspondence between the
object instances across frames. These methods are
efficient and can handle partial or/and full occlu-
sions. However, their complexity is high, because
it is related to the number of objects and the num-
ber of pixels processed to extract the visual feature
and to match them. In the other hand, in point
tracking algorithms, the object is represented by one
point and, often, is tracked based only on its motion
(Joint Probability Data Association (JPDA) (Black-
man and Popoli, 1999), Multi-Hypothesis tracking
(MHT) (Blackman, 2004), Gaussian Mixture Prob-
ability Hypothesis Density (GMPHD) (Vo and Ma,
2006)...). The point representation of the objects
causes a less efficient tracking for a visual system
where there is a lot of occlusions between objects.
However, it allows low complexity algorithms.
194
Dziri A., Duranton M. and Chapuis R..
Low Complexity Multi-object Tracking System Dealing with Occlusions.
DOI: 10.5220/0005316701940201
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 194-201
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

In this paper, we propose a low complexity multi-
object tracking system that can handle occlusions be-
tween objects. To detect the objects of interest we
use a basic background subtraction (BGS) algorithm
and a connected component analysis method to en-
sure a low complexity detection. The detected ob-
jects are then tracked with GMPHD tracker. The
original GMPHD filter is a point tracker that can-
not handle occlusions. To deal with this problem,
GMPHD were improved to detect and deal with oc-
clusions. This approach is developed to be used in
a node of global surveillance system where several
nodes are connected to each other and where the cost
of each node and its energy consumption should be
minimized.
The section-2 of the paper presents the detection
method. The section-3 reviews the original GMPHD
tracker. In section-4, the related work for occlusion
handling based on GMPHD tracker are discussed.
The section-5 explains our approach dealing with oc-
clusions between objects. Finally, the whole tracking
system is tested with PETS2009 (pets2009, 2009) and
CAVIAR (caviar, 2004) datasets and the results are
compared to the original GMPHD tracker.
2 DETECTION
Detection is the step allowing to localize the objects
of interest in the image plan. It is the part requiring a
lot of computing resources in a vision tracking system
that uses a point tracker. Indeed, to have a low com-
plexity multi-target tracking system, a low complex-
ity detection method is required. A basic background
subtraction method, defined by equations (1) and (2),
is used. The noise is reduced by a morphological fil-
tering. A connected component analysis is performed
on the filtered image and the bounding box, the cen-
troids coordinates and the area of each blob are ex-
tracted. The blobs with an area lower than a defined
threshold are eliminated. The other blobs form the ob-
jects of interest. The centroids coordinates, the height
and the width of the objects constitute the observa-
tions used by GMPHD tracker.
BG
k
(x, y) = (1−α)BG
k−1
(x, y) +αI
k
(x, y)
(1)
FG
k
(x, y) =
1 if |I
k
(x, y) −BG
k−1
(x, y)| ≥ th
fg
0 if |I
k
(x, y) −BG
k−1
(x, y)| < th
fg
(2)
BG
k
and FG
k
are respectively the background model
and the foreground binary image at time k, I
k
is the
input image at time k and α is the learning rate of the
background model.
This detection method requires only one gray-
level frame to buildthe backgroundmodel. Compared
to a complex modeling of the background like Gaus-
sian Mixture Model (GMM) where each pixel of the
model is represented by a mixture of Gaussian, the
complexity of the used method is lower. For the con-
nected component analysis efficient implementations
already exist (Ma et al., 2008). The detection quality
of this method remains acceptable for slow illumina-
tion change of the scene.
3 GAUSSIAN MIXTURE
PROBABILITY HYPOTHESIS
DENSITY
GMPHD is an implementation of the Probabil-
ity Hypothesis Density (PHD) filter developed by
Mahler (Mahler, 2003), for multi-target tracking
(MTT). The PHD filter is used, in computer vision,
for multi-object tracking (Wang et al., 2006), (Ed-
man et al., 2013) or to improve the objects detection
in videos (Hoseinezhad et al., 2009), (Wu and Hu,
2010).
GMPHD is the implementation of PHD where the
multi-target state is modeled by a Gaussian mixture.
Each track is represented by a Gaussian distribution
that is defined by a weight used to confirm the track,
a mean that describes the state vector of the target,
a covariance matrix and an unique ID that represents
the target’s identity. The advantage of this filter com-
pared to other methods, is that it allows to track a time
varying number of targets. Furthermore, it manages
the initialization, the maintenance and the termination
of tracks. The track initialization can be caused by a
birth of new targets or by targets spawned from exist-
ing targets. It also takes into account the clutter den-
sity in the surveillance region. The clutter in a vision
tracking system is generally caused by the imperfec-
tion of the detection method (miss detectionsand false
alarms).
The first step of GMPHD consists in predicting the
multi-target state based on the previous multi-target
state, i.e, it initializes the new tracks using an initial-
ization model and propagates the existing tracks using
a state model. This step is described by equations (3)
to (7). In the prediction step, new IDs are assigned to
the new tracks and the existing tracks will keep their
IDs. The weight, mean and covariance of the Gaus-
sian components representing new tracks are defined
by the initialization model. The mean and the covari-
ance of Gaussian components representing the exist-
ing tracks are predicted as in Kalman filter.
LowComplexityMulti-objectTrackingSystemDealingwithOcclusions
195

V
k|k−1
(x
k|k−1
) =
J
γ,k
∑
i=1
ω
(i)
γ,k
N (x
k|k−1
;m
(i)
γ,k
, P
(i)
γ,k
)
+
J
k−1|k−1
∑
i=1
J
β,k
∑
j=1
ω
(i)
k−1|k−1
ω
( j)
β,k
N (x
k|k−1
;m
(i, j)
S
, P
(i, j)
S
)
+ p
s,k
J
k−1|k−1
∑
i=1
ω
(i)
k−1|k−1
N (x
k|k−1
;m
(i)
p
, P
(i)
p
)
(3)
m
(i, j)
S
= F
( j)
β,k
m
(i)
k−1|k−1
+ d
( j)
β,k
(4)
P
(i, j)
S
= Q
( j)
β,k
+ F
( j)
β,k
P
(i)
k−1|k−1
(F
( j)
β,k
)
T
(5)
m
(i)
p
= F
k
m
(i)
k−1|k−1
(6)
P
(i)
p
= Q
k
+ F
k
P
(i)
k−1|k−1
F
T
k
(7)
The form GM(x) =
∑
J
i=1
ω
i
N (x;m
i
, P
i
) represents a
Gaussian mixture. J is the number of Gaussian com-
ponents in the mixture. ω
i
,m
i
and P
i
are respectively
the weight, the mean and the covariance matrix of the
i
th
Gaussian component. V
k|k−1
(x
k|k−1
) is the Gaus-
sian mixture modeling the predicted multi-target state
at time k. J
γ,k
, ω
γ,k
, m
γ,k
, P
γ,k
define the Gaussian mix-
ture modeling the birth of new targets. J
β,k
, ω
β,k
, m
S,k
,
P
S,k
define the Gaussian mixture modeling spawned
targets from existing targets. J
k−1|k−1
, ω
k−1|k−1
,
m
k−1|k−1
, P
k−1|k−1
define the Gaussian mixture mod-
eling the multi-target state at time k. p
s,k
(x
k−1
) is the
probability of the target whose state is x
k−1
at time
k − 1 to survive at time k. F
k
and Q
k
describe the dy-
namic model of the targets at time k, and F
(i)
β,k
, d
(i)
β,k
and
Q
(i)
β,k
describe the spawning model at time k. A
T
is the
transpose of a matrix A.
The second step of GMPHD consists in updat-
ing the multi-target state by using the current obser-
vations. This step is described by equations (8) to
(15). Each Gaussian component representing a pre-
dicted track is expanded to M
k
+ 1 Gaussian compo-
nents where M
k
represents the number of observations
at time k. M
k
of these Gaussian components are the
result of updating the state with the observations. The
other Gaussian component is the result of updating
the track without any observation. This allows to take
into account the miss detection of the target that can
be caused by the detection method. The M
k
+1 Gaus-
sian components have the same ID as the predicted
track from where they were expanded.
V
k|k
(x
k
) =
∑
z∈Z
k
J
k|k−1
∑
i=1
ω
cd
(z)
(i)
N (x
k
;m
cd
(z)
(i)
, P
(i)
cd
)
+ (1− p
D,k
)
J
k|k−1
∑
i=1
ω
(i)
k|k−1
N (x
k
;m
(i)
k|k−1
, P
(i)
k|k−1
)
(8)
where
ω
cd
(z)
(i)
=
p
D,k
ω
(i)
k|k−1
N (z;m
(i)
, S
(i)
)
κ
k
(z) + L(z)
(9)
m
(i)
= H
k
m
(i)
k|k−1
(10)
S
(i)
= R
k
+ H
k
P
(i)
k|k−1
H
T
k
(11)
L(z) = p
D,k
J
k|k−1
∑
j=1
ω
( j)
k|k−1
N (z;m
( j)
, S
( j)
)
(12)
m
cd
(z)
(i)
= m
(i)
k|k−1
+ K
(i)
k
(z− m
(i)
)
(13)
P
(i)
cd
= [I − K
(i)
k
H
k
]P
(i)
k|k−1
(14)
K
(i)
k
= P
(i)
k|k−1
H
T
k
S
(i)
−1
(15)
V
k|k
(x
k
) is the Gaussian mixture modeling the up-
dated multi-target state at time k. J
k|k−1
, ω
k|k−1
,
m
k|k−1
, P
k|k−1
define the predicted Gaussian mixture
at time k. Z
k
is the set of observations at time k.
p
D,k
(x
k
) is the probability to detect a target having
the state x
k
at time k. κ
k
(.) is the parameter model-
ing clutter density at time k. H
k
and R
k
describe the
observation model at time k.
Equations (3) and (8) show that the number of
Gaussian components in the mixture increases from
J
k−1|k−1
at time k − 1 to J
k|k
= (J
k−1|k−1
(1 + J
β,k
) +
J
γ,k
)(M
k
+ 1) at time k. To limit the number of com-
ponents to J
max
, a pruning and merging method was
developed by Vo (Vo and Ma, 2006). This step in-
volves to delete the Gaussian components with low
weights and merge the Gaussian components close to
each other. Mahalanobis distance is used to detect
if two Gaussian components are close to each other.
When several Gaussian components are merged, the
ID of the result will be the ID of the Gaussian compo-
nent with the highest weight. Finally, after the prun-
ing and the merging, only the J
max
Gaussian compo-
nents with highest weights are kept.
In the final Gaussian mixture, several Gaussian
components can have the same ID. This happens
when a target splits. The Gaussian component with
the highest weight keeps the ID and all the others will
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
196

receive new IDs (Clark et al., 2006). The Gaussian
components with weights above a defined threshold
(th
estimation
) constitute the confirmed tracks.
GMPHD is a point tracker offering the best trade-
off between the computing complexity and the track-
ing quality (Dziri et al., 2014). However, in a video
tracking scenario, the objects are not points and oc-
clusions between objects can occur. In this case, the
detection method detects only one object and only one
observation is generated. This observation will be
associated to only one of the occluded objects. The
weights of the Gaussian components representing the
other objects decrease very fast and become lower
than the pruning threshold. The tracks of these objects
are, then, pruned and the objects’ IDs are lost. When
the occlusion ends, these objects receive new IDs be-
cause of the splitting, detected in GMPHD. This is
a big limitation for consistent targets labeling. To
solve this problem, several approach were developed.
These approaches are reviewed in the next section.
4 RELATED WORK
To solve the occlusion problem, the authors of (Vi-
jverberg et al., 2009) improved the tracking by ex-
tending the state vector (position and velocity) with
the width and the height of the extracted bounding
box. The second contribution is the use of Fisher cri-
terion instead of Mahalanobis distance in the merging
step of GMPHD. Finally, to handle the occlusion be-
tween targets, occlusion detection is performed after
the prediction step. If the distance between two pre-
dicted Gaussian components is smaller than a defined
threshold, there is a high probability that the observa-
tions of the targets associated to these Gaussian com-
ponents will overlap. In this case, a composed tar-
get is initialized. The composed target contains refer-
ences to the overlapped targets. Both composed target
and overlapped targets are updated in GMPHD. After
the pruning and merging step, an overlapped target
is removed from the composed target if it is too far
from all the other overlapped targets belonging to the
composed target. In the same way, the composed tar-
get is removed if it contains less than two overlapped
targets. Finally, the overlapped targets are merged ir-
reversibly when the weight of the composed target is
higher than the sum of the weights of the overlapped
targets. This approach does not introduce a big over-
head in the complexity of the algorithm. However,
the drawback of this approach is that the weights of
overlapped targets will decrease very fast when there
is no observations generated for them. This leads to
perform an irreversible merging after some frames of
overlapping and to lose the overlapped targets.
The occlusion problem in (Eiselein et al., 2012) is
addressed by using the approach of hypothesis propa-
gation described in (Panta et al., 2009). The approach
of (Panta et al., 2009) uses label trees to ensure a con-
sistent target labeling. Each label represents a unique
physical target. Each branch of a label tree is a possi-
ble state trajectory of the target. The hypothesis prop-
agation is managed as in Track Oriented Multiple Hy-
pothesis Tracking (TOMHT) filter (Blackman, 2004).
Each label tree is classified as confirmed or tentative
and the N-scan pruning procedure is used to limit the
number of hypothesis. The score used in hypothesis
propagation is based on the weight of tracks. In each
branch, the track with the highest score is selected to
form the target trajectory. When an occlusion occurs
between two targets, both states will exist in both la-
bel trees. The score computed with Log-Likelihood
Ratio (LLR) is propagated from time k − 1 to time k
to rank the tracks. When the occlusion ends, the track
with the highest score is selected in each label tree.
The authorsof (Eiselein et al., 2012) adopted the same
approach for a vision system. They contributed by
using an appearance feature (color histogram) to rank
the tracks when an overlapping occurs. Indeed, if two
targets are close to each other, they will be considered
overlapped and the N-scan pruning procedure is dis-
abled. At that time, both states will exist in both label
trees and histogram matching will be used to compute
the score. When the targets get far from each other,
the track with highest score is selected in each label
tree. The method is interesting for vision tracking
since it allows the use of image features (color, tex-
ture, ...) to handle objects overlapping in GMPHD.
However, it has the same drawbacks as the TOMHT
approach where the complexity increases rapidly with
the occlusion time and the number of hypothesis.
The authors of (Lamard et al., 2012) perform ob-
jects tracking in real world coordinate using Gaussian
Mixture Cardinalized PHD (GMCPHD) filter. They
use the image information to detect occlusions. After
prediction, targets are projected from the real world
to the image plan. If an overlapping between targets
is noticed in the image, the detection probability is
modeled in GMCPHD to take that into consideration.
This allows to have both targets when occlusion oc-
curs and to reidentify the targets when the occlusion
ends, if they did not change their directions. How-
ever, this method requires camera calibration which is
not always possible. Additionally, the image features
cannot be exploited in the reidentification process.
LowComplexityMulti-objectTrackingSystemDealingwithOcclusions
197
5 OUR APPROACH
To deal with occlusion between objects we extend the
original GMPHD tracker, presented in section-3, by
occlusion detection module and objects reidentifica-
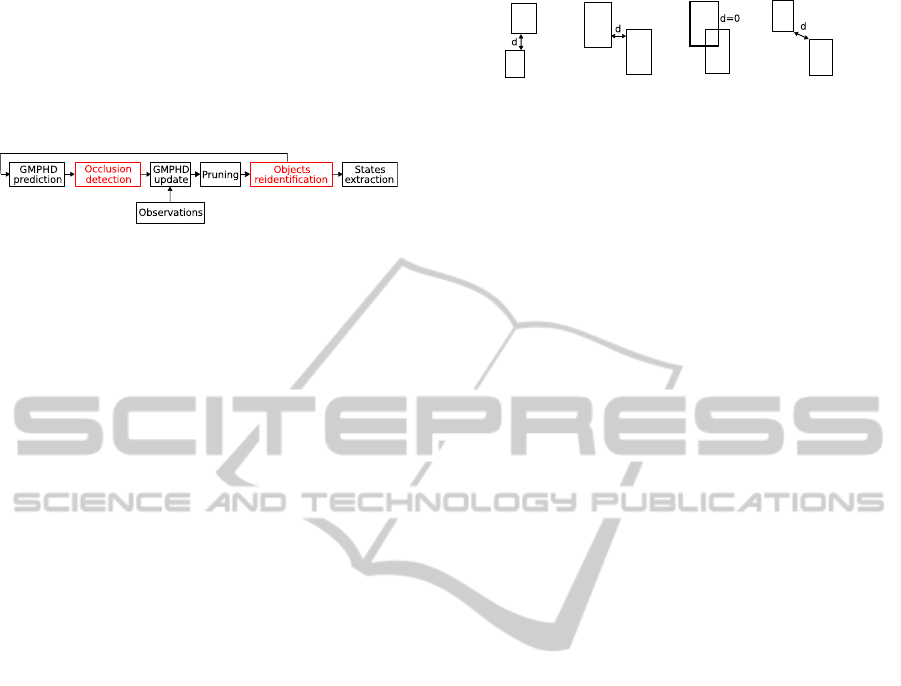
tion module, as shown in the figure 1. The occlusion
Figure 1: Schematic diagram of the improved GMPHD
tracker.
detection module consists in computing a distance be-
tween the predicted Gaussian components represent-
ing active targets. We consider a target as active if the
weight of its Gaussian component is above the esti-
mation threshold th
estimation
, for more than N succes-
sive frames. If the distance between the predictions
of active targets is lower than a defined threshold,
the active targets are considered overlapping. In this
case, the weights, means and covariance matrices of
the Gaussian components are merged using the merg-
ing method described in section-3 to form a composed
target. All the targets’ IDs are kept in the composed
target. Furthermore, features from each target are ex-
tracted and saved in the composed target to allow a
correct reidentification when the occlusion ends, i.e.
assign the right ID to the right target. Several features
can be extracted from the objects, to choose the ap-
propriate features the reader is invited to see (Vezzani
et al., 2013). Finally, in the image plan, an occluded
target is represented by one rectangle containing sev-
eral IDs and is defined by its centroid coordinates,
width and height. To incite the split of the composed
target, the standard deviation of the coordinates x and
y of the state vector are increased. This allows to en-
large the area where the observations, generated by
the objects resulting from the split, appear.
The distance used to detect objects overlapping is
the distance between two rectangles, described in fig-
ure 2. When an overlapping occurs between two rect-
angles the distance is equal to zero. In cases where
rectangles do not overlap the distance is equal to the
minimum Euclidean distance between the points of
the rectangles. The choice of this distance is due to
the model of objects represented by rectangles. Fur-
thermore, this distance has more physical meaning, in
this case, than Mahalanobis distance or Fisher crite-
rion used in (Vijverberg et al., 2009). It also uses sim-
ple operations which makes it a low complexity dis-
tance. The composed targets and all the other tracks
undergo the update and pruning steps of the original
GMPHD filter. To avoid losing targets because of the
merging step, i.e merge two active targets and keep
Figure 2: Distance between two rectangles.
only one ID, we only merge the non-active targets.
GMPHD tracker (section-3) allowsthe association
of one track to several observations when an object
splits. The objects corresponding to these observa-
tions will have the same ID. When this happens, the
object represented by the Gaussian component with
the highest weight keeps its ID and the other objects
receive new IDs. In our approach, this is true only
when the split target is not a composed target, i.e.
the split target have only one ID. Indeed, if two or
more objects have the same set of IDs and the num-
ber of IDs in each track is greater than one, it means
that a composed target is split into several targets and
that the occlusion ended. In this case, the reidenti-
fication module compares the saved features to the
new features, in order to assign the right ID to the
right object. For example, assume that a color his-
togram is used as features and can be extracted by
the detection method for each detected object. When
an occlusion is detected between several objects, the
histogram of the objects are extracted. These objects
are merged in global object and their histograms are
saved. When the occlusion ends, several composed
objects will have the same set of IDs. The histogram
given by the detection method for each objects is com-
pared to the features saved in the composed object
using Euclidean distance. The ID associated to the
feature allowing the smallest distance is assigned to
the object, and this ID is deleted from all the other
composed objects.
If a composed object contains more than two oc-
cluded objects, when the occlusion ends, the object
with the big bounding box will contain the largest
number of IDs. For example, if three objects over-
lap and if the global object split into two objects, the
one with the big bounding box keeps two IDs and the
other takes the ID given by the re-identification mod-
ule.
Our approach can be used independently on the
detection method and it is not constrained by the type
of features. The image features and the matching dis-
tance in the object reidentification module can be se-
lected by the user depending on the reidentification
rate and the computing resources allowed for a given
tracking scenario. Our approach uses the image fea-
tures only when it is required. Indeed, as the use of
image features requires considerable computing re-
sources, our approach optimizes the use of these fea-
tures to allow a low complexity multi-object tracking,
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
198
2
3
4
5
6
7
8
9
200 300 400 500 600 700 800
Number of objects
frame
detection
GMPHD tracker
our approach
ground truth
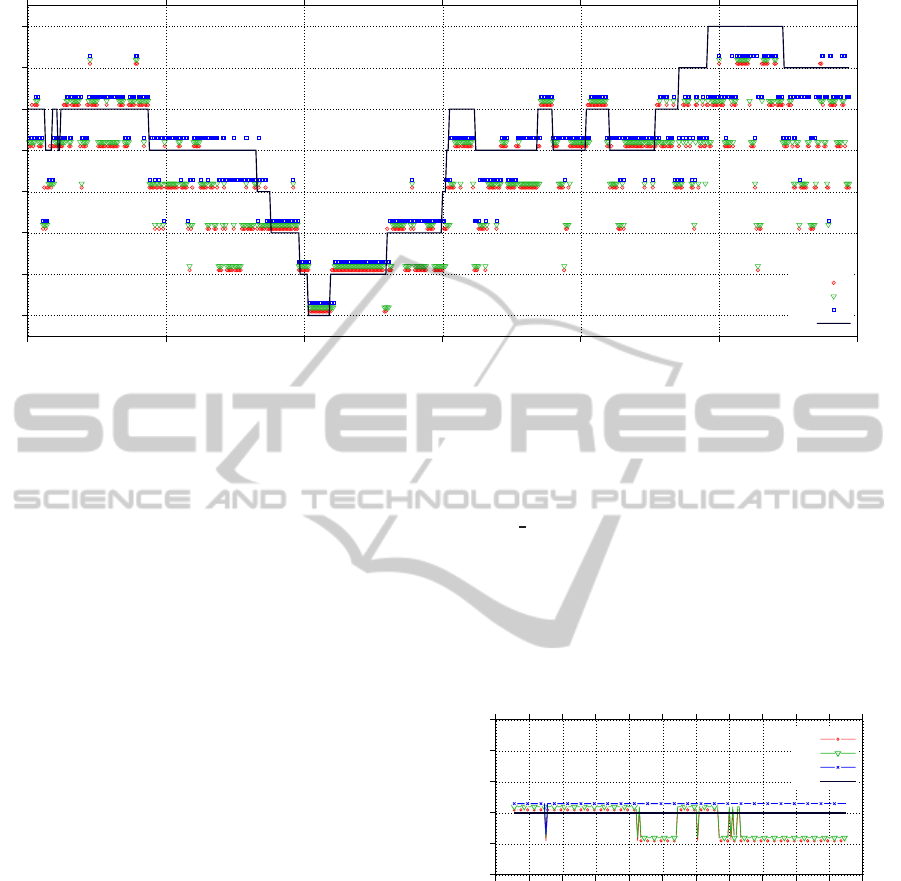
Figure 3: Number of objects estimated over time for PETS2009 dataset. The markers are shifted for the different approaches
for readability purpose.
i.e, the image features are only used when there is oc-
clusion between objects.
6 RESULTS
In this section, our approach is compared to GMPHD
tracker presented in section-3 and the improvements
obtained are evaluated. The state vector, in both ap-
proaches, contains the position and the velocity coor-
dinates of the object. The width and the height of the
objects are defined by the detection method.
Tracking systems are evaluated based on the fol-
lowing functionalities:
1. The ability of estimating the correct position of
objects
2. The ability of estimating the correct number of
objects in each frame
3. The ability of ensuring consistent labeling of ob-
jects over time, i.e. assign a unique ID for each
object and keep this assignement over the track-
ing.
The functionalities (1) and (2) depend on both detec-
tion and tracking methods. However, functionality (3)
is only related to the tracking method. Indeed, our im-
provement will affect the functionalities (2) and (3)
when objects overlapping occurs. Our approach does
not change the way that the position of objects is es-
timated, the estimation is the same as the one of GM-
PHD tracker. Because of that, the functionality (1) is
not discussed.
Our approach is evaluated using the sequence
S2L1-view1 of PETS2009 dataset (pets2009, 2009)
where several humans (the maximum at the same
time is 9) walk in the scene and several occlu-
sions happen between them. The second sequence
is Meet
WalkTogether1 of CAVIAR dataset (caviar,
2004) where two humans meet and walk together.
The tracking is performed from frame 201 to 700 in
PETS2009 dataset. The 200 first frames were used
to initialize the background model. For CAVIAR
dataset, the tracking is performed on the frames 1250
to 1450. The frame 1000 to 1250 are used to initialize
the background model.
0
1
2
3
4
5
240 260280 300 320 340360 380 400 420 440460
Number of objects
frame
detection
GMPHD tracker
our approach
ground truth
Figure 4: Number of objects estimated over time for
CAVIAR dataset. The markers are shifted for the different
approaches for readability purpose.
Firstly, the accuracy of our method in estimating
the number of objects in the field of view (FoV) of the
camera is evaluated and compared to the ground truth.
The ground truth is manually evaluated by counting
the number of humans in each frame. As the num-
ber of estimated objects is directly related to the de-
tector quality, both number of detected objects and
estimated objects are given in figures 3 and 4. The
number of objects in each frame is estimated on both
datasets with both methods.
Figures 3 and 4 show that our method estimates
LowComplexityMulti-objectTrackingSystemDealingwithOcclusions
199

well the number of objects in FoV of the camera and
outperforms GMPHD tracker. Indeed, even if the de-
tector does not return the correct number of objects
in the frame because of the occlusion, our method
can handle that and gives the right number of ob-
jects. This is due to the occlusion detection module.
The error in estimating the number of objects in the
frames 506 to 540 of the PETS2009 dataset is because
two objects entered the FoV already occluded. When
the occlusion ends, the corrected number of object is
estimated. The number of object estimated by both
methods is not correct in the frames 690 to 790 of
PETS2009 dataset. This is because the human open-
ing the trunk of the car present in the scene is very
small to be detected.
The performance of finding the correct ID of each
object, after an occlusion, is evaluated by counting
the number of times that the object’s ID changes for
each real object over the tracking. When an object
leaves the scene and enters again, it is considered as a
new object. As each object is represented by a unique
ID, the less the object’s ID changes, the most efficient
the tracking algorithm is. This is evaluated on both
datasets and two different features are tested: color
histogram and motion feature. The results obtained
are compared to GMPHD tracker. There are seven-
teen objects, in PETS2009 sequence and two objects
in CAVIAR sequence.
The color histogram feature is used as explained
in the example of section-5. The use of motion fea-
ture involves to save in the composed target the state
vectors of occluded objects. At each time iteration,
these features undergo the prediction step of GM-
PHD. When the composed target splits, the motion
direction is used to reidentify the objects. The direc-
tion can be deduced from the sign of velocity coordi-
nates of the state vector. Indeed, if two objects cross
each other, their velocity coordinates will have differ-
ent sign. In this case, the split object will get the ID
corresponding to the feature having the same velocity
sign. When the overlapped objects have the same di-
rection, the velocity sign is not enough to reidentify
them correctly. In this case, the Euclidean distance
between their positions is used. The ID corresponding
to the feature with the smallest distance is assigned to
the object.
Figure 5 shows the number of times that the ob-
ject’s ID change in the PETS2009 dataset. The num-
ber of change per object is high in GMPHD tracker.
This number is reduced, using our approach. The mo-
tion feature performs better than the color histogram
because, in this dataset, the color of the cloths is not
very different from one human to another. Using 256
bins per channel, in the color histogram, allows more
0
2
4
6
8
10
12
14
16
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Number of times that the ID changed
Real object
motion feature
color 8 bins
color 256 bins
GMPHD tracker
Figure 5: Object’s ID change in PETS2009 dataset. Color
8 bins: the RGB histogram with 8 bins per channel. Color
256 bins: the RGB histogram with 256 bins per channel
robust reidentification than the case where only 8 bins
are used per channel. Even with our approach, the
number of the objects’ ID change is not zero. Indeed,
a lot of changes are caused by miss detection, when
the objects are occluded by the environment, typically
the light pole in the middle of the scene. GMPHD
tracker has an average of 4.58 change of ID per ob-
ject. However, our method achieve an average of 1.89
with the motion feature and 2 with the color histogram
256 bins.
The same experiment is performed on CAVIAR
dataset. Using GMPHD tracker, the first object
changes its ID 2 times and the second 4 times. With
our approach, this change is reduced to zero for both
objects independently on the used features.
Several examples of images are presented in fig-
ure 6. In each example, the states: before occlusion,
during occlusion and at the end of the occlusion are
showed for our approach and for GMPHD tracker.
Concerning the complexity of the algorithm, our
tracking system is implemented using C language.
Using the motion feature on PETS2009 dataset with
an image resolution of 768 × 576, the whole multi-
object tracking system (detection + tracking + occlu-
sion handling) exceeds 60 fps on a core 2 duo PC run-
ning at 3 GHz. These results are very promising for
an embedded implementation on low cost computer
architecture.
7 CONCLUSION
In this paper, we presented a low complexity multi-
object tracking algorithm that can be used in a node
of a global tracking system to ensure a low cost sys-
tem. Our approach is based on GMPHD filter and can
handle the occlusion between objects. The obtained
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
200

Figure 6: Examples of tracking.
results on PETS2009 and CAVIAR datasets show that
our approach offers a high improvement in estimat-
ing the number of objects and in ensuring a consistent
targets labeling over time, compared the original GM-
PHD. Furthermore, our approach exceeds 60 fps on a
PC. This makes it a good candidate for an embedded
implementation.
The future work consists in implementing our
method on an embedded processor with low comput-
ing resources connected to an image sensor in order
to form a smart camera. The idea is to extend our
approach to a network of smart cameras.
REFERENCES
Blackman, S. (2004). Multiple hypothesis tracking for mul-
tiple target tracking. Aerospace and Electronic Sys-
tems Magazine, IEEE, 19(1):5–18.
Blackman, S. and Popoli, R. (1999). Design and Analysis of
Modern Tracking Systems. Artech House, Norwood,
MA.
caviar(2004). http://homepages.inf.ed.ac.uk/rbf/caviardata1.
Clark, D., Panta, K., and Vo, B.-N. (2006). The gm-phd
filter multiple target tracker. In Information Fusion,
2006 9th International Conference on, pages 1–8.
Dziri, A., Duranton, M., and Chapuis, R. (2014). Low com-
plexity multi-target tracking for embedded systems.
In Information Fusion (FUSION), 2014 17th Interna-
tional Conference on, pages 1–8.
Edman, V., Maria, A., Granstr¨om, K., and Gustafsson, F.
(2013). Pedestrian group tracking using the gm-phd
filter. In Proceedings of the 21st European Signal Pro-
cessing Conference :.
Eiselein, V., Arp, D., Patzold, M., and Sikora, T. (2012).
Real-time multi-human tracking using a probability
hypothesis density filter and multiple detectors. In Ad-
vanced Video and Signal-Based Surveillance (AVSS),
2012 IEEE Ninth International Conference on, pages
325–330.
Geronimo, D., Lopez, A., Sappa, A., and Graf, T. (2010).
Survey of pedestrian detection for advanced driver as-
sistance systems. Pattern Analysis and Machine Intel-
ligence, IEEE Transactions on, 32(7):1239–1258.
Hoseinezhad, R., Vo, B.-N., and Suter, D. (2009). Fast
single-view people tracking. In Cognitive Systems
with Interactive Sensors (COGIS2009).
Lamard, L., Chapuis, R., and Boyer, J.-P. (2012). Dealing
with occlusions with multi targets tracking algorithms
for the real road context. In Intelligent Vehicles Sym-
posium (IV), 2012 IEEE, pages 371–376.
Ma, N., Bailey, D., and Johnston, C. (2008). Optimised sin-
gle pass connected components analysis. In ICECE
Technology, 2008. FPT 2008. International Confer-
ence on, pages 185–192.
Mahler, R. (2003). Multitarget bayes filtering via first-order
multitarget moments. Aerospace and Electronic Sys-
tems, IEEE Transactions on, 39(4):1152–1178.
Panta, K., Clark, D., and Vo, B.-N. (2009). Data association
and track management for the gaussian mixture prob-
ability hypothesis density filter. Aerospace and Elec-
tronic Systems, IEEE Transactions on, 45(3):1003–
1016.
pets2009 (2009). http://cs.binghamton.edu/ mrl-
data/pets2009.html.
Roller, D., Daniilidis, K., and Nagel, H. (1993). Model-
based object tracking in monocular image sequences
of road traffic scenes. International Journal of Com-
puter Vision, 10(3):257–281.
Vezzani, R., Baltieri, D., and Cucchiara, R. (2013). People
reidentification in surveillance and forensics: A sur-
vey. ACM Comput. Surv., 46(2):29:1–29:37.
Vijverberg, J. A., Koeleman, C. J., and With, P. H. N. d.
(2009). Tracking rectangular targets in surveillance
videos with the gm-phd filter. In Proceedings of
the 30-th Symposium on Information Theory in the
Benelux, pages 177–184.
Vo, B.-N. and Ma, W.-K. (2006). The gaussian mixture
probability hypothesis density filter. Signal Process-
ing, IEEE Transactions on, 54(11):4091–4104.
Wang, L., Hu, W., and Tan, T. (2003). Recent develop-
ments in human motion analysis. Pattern Recognition,
36(3):585 – 601.
Wang, Y.-D., Wu, J.-K., Kassim, A., and Huang, W.-M.
(2006). Tracking a variable number of human groups
in video using probability hypothesis density. In Pat-
tern Recognition, 2006. ICPR 2006. 18th Interna-
tional Conference on, volume 3, pages 1127–1130.
Wu, J. and Hu, S. (2010). Phd filter for multi-target visual
tracking with trajectory recognition. In Information
Fusion (FUSION), 2010 13th Conference on, pages
1–6.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object track-
ing: A survey. ACM Comput. Surv., 38(4).
LowComplexityMulti-objectTrackingSystemDealingwithOcclusions
201
