
Knowledge Bases for Visual Dynamic Scene Understanding
Ernst D. Dickmanns
Technology of Autonomous Systems, University of the Bundeswehr, Munich, Germany
Department of Aero-Space Technology (LRT), Neubiberg, Germany
Keywords: Knowledge Representation, Real-time Machine Vision, Behavior Decision, Scene Understanding.
Abstract: In conventional computer vision the actual 3-D state of objects is of primary interest; it is embedded in a
temporal sequence analyzed in consecutive pairs. In contrast, in the 4-D approach to machine vision the
primary interest is in temporal processes with objects and subjects (defined as objects with the capability of
sensing and acting). All perception of 4-D processes is achieved through feedback of prediction errors
according to spatiotemporal dynamical models constraining evolution over time. Early jumps to
object/subject-hypotheses including capabilities of acting embed the challenge of dynamic scene
understanding into a richer environment, especially when competing alternatives are pursued in parallel
from beginning. Typical action sequences (maneuvers) form an essential part of the knowledge base of
subjects. Expectation-based Multi-focal Saccadic (EMS-) vision has been developed in the late 1990s to
demonstrate the advantages and flexibility of this approach. Based on this experience, the paper advocates
knowledge elements integrating action processes of subjects as general elements for perception and control
of temporal changes, dubbed ‘maneuvers’ here. − As recently discussed in philosophy, emphasizing
individual subjects and temporal processes may avoid the separation into a material and a mental world;
EMS-vision quite naturally leads to such a monistic view.
1 INTRODUCTION
Starting in ancient philosophy (Socrates, Plato,
Aristotle), then continued every now and then over
almost 2500 years, and especially in the recent past
there has been a discussion about what is the right
way to treat the phenomenon of ‘knowledge’. Is
there a quasi-static truth over and above individuals
(Plato and followers) or do we essentially observe
physical processes and actions of individuals and
then have to come to interpretations that have to be
mutually accepted without any guaranteed relation
to an observer-independent truth.
In their dissertations (Noe 1995, see Noe 2004;
Kiverstein 2005) the authors investigate the question
whether the claimed insurmountable gap between
the naturalistic and the idealistic (phenomenal)
philosophical view can be bridged by an approach
basically different from the predominant one. They
came to the conclusion that avoiding the quasi-static
‘absolute’ view and relying more on temporal
processes with individual subjects may eliminate the
development of a gap. In a similar direction hint the
results of the Russian psychologist and philosopher
(Leontyev 2009). In his view the core of knowledge
is the capability of individuals to make sense of a
process observed and to respond with some activity,
the outcome of which is the basis for learning
behaviors and for developing capabilities for goal
oriented decisions as well as for a system of values.
In terms of modern neurophysiology this view
may be associated with the effect of the mirror
neurons in brains of vertebrates that are active both
when an action is performed and when it is visually
observed by a subject (Gallese and Goldman 1998,
see also web-entries). The essential point is that
activities over time are directly represented in neural
systems as well as abstracted quasi-static results.
In the field of ‘Cognitive Vision’, a survey may
be found in (Christensen and Nagel 2006) with over
500 references. The introductory Section (Vernon
2006) finishes with the conclusion: “Broadly
speaking, there are essentially two approaches to
recognition: 1. The cognitivist symbolic information
processing representational approach, 2. The
emerging systems approach (connectionism,
dynamical systems, enactive systems)... . The former
one takes a predominantly static view of knowledge
209
D. Dickmanns E..
Knowledge Bases for Visual Dynamic Scene Understanding.
DOI: 10.5220/0005340802090215
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 209-215
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

represented by symbol systems that refer to the
physical reality that is external to the cognitive
agent. ... The emergent systems approach: ● takes a
predominantly dynamic or process view of know-
ledge, and views it more as a collection of abilities
that encapsulate ‘how to do’ things; ● is therefore
subservient to the cognitive agent and dependent on
the agent and the environmental context.”
The former (quasi-static) approach was the
predominant one in the 1980s. A group at UniBw
Munich has used a dynamical-systems-approach for
vehicle guidance by computer vision by relying on
feedback of prediction errors for image features
(Kalman 1960). The use of real-world dynamical (4-
D) models for image sequence processing resulted in
a breakthrough in performance achieved with very
limited computing power (Dickmanns, Graefe 1988,
Dickmanns 2007). For road vehicle guidance by
machine vision, in the meantime, the approach based
on the Extended Kalman Filter (EKF) has become
the standard method for recognition of road and lane
parameters as well as for tracking other vehicles.
In any case it is essential that the dynamical
models used represent objects in the real world,
including their behavior over time (and not in some
intermediate measurement space like image
coordinates). Human knowledge about the world is
mainly geared to objects and classes of object. Two
hyper-classes of objects have to be distinguished if
scene understanding on the semantic level is the
goal: 1. Objects that are not able to initiate motion
on their own (called here more precisely: ‘objects
proper’) and 2. objects that are able to sense
information about the environment and to activate
some control output affecting their physical state;
the latter will be dubbed ‘subjects’ here. All animals
and robots fall into this category. The simple term
‘object’ is used here for both types.
For understanding of scenes including subjects it
is mandatory to have knowledge available about
how these subjects transform their sensor data into
own behavior. If this triggering of behavior is not a
fix program, like in humans, the closed-loop
sequence of sensing, behavior decision and acting is
of importance. Since direct access to mental
processes of subjects is not possible, the best
substitute is to try to grasp a subject’s intention by
observing the onset of maneuvers. This is possible
only if typical maneuvers of members of the class of
subjects observed are represented in the knowledge
base of the observer; in the context of the situation
given, the likely candidates for maneuvers have to
be recognized from data of their onset. Knowledge is
not considered to be absolute truth but the best
background available in the individuals or in the
community for arriving at proper decisions in actual
or future situations of any kind.
2 EFFICIENT REPRESENTATION
OF SUBJECTS
To a large extent, knowledge about the world is
linked to classes of subjects and to their individuals.
Beside geometrical shape and body articulation
these classes and their individuals are characterized
by the capabilities of: a) sensing, b) data processing
and perception on a higher mental level, c) decision
making in a situational context, and d) control
actuation for achieving some goal or a mission.
In order to understand the semantics of what
these individuals are doing it is necessary to have
knowledge about the maneuvers performed and
about the context these maneuvers are applied in,
usually. This means that three levels should be
represented and used in parallel:
1. The visual feature level with links to objects and
to how their motion and ego-motion affect the
appearance of these features (Jacobian matrices);
2. The object level with:
α) Body shape and articulation,
β) typical movements of limbs, head/neck and
the body as part of maneuver elements for
locomotion or some other goal.
γ) Feature distribution on their 3-D surface.
δ) Typical goals of subjects in given situations.
3. The task domain on the situation level with
typical environmental conditions.
One basic task of subjects is to come up with well-
suited decisions for their own behavior given the
environmental conditions perceived and the own
system of goals and values. Thus, the whole range
from features of objects to situations for subjects
has to be considered in parallel.
2.1 The Decision Framework
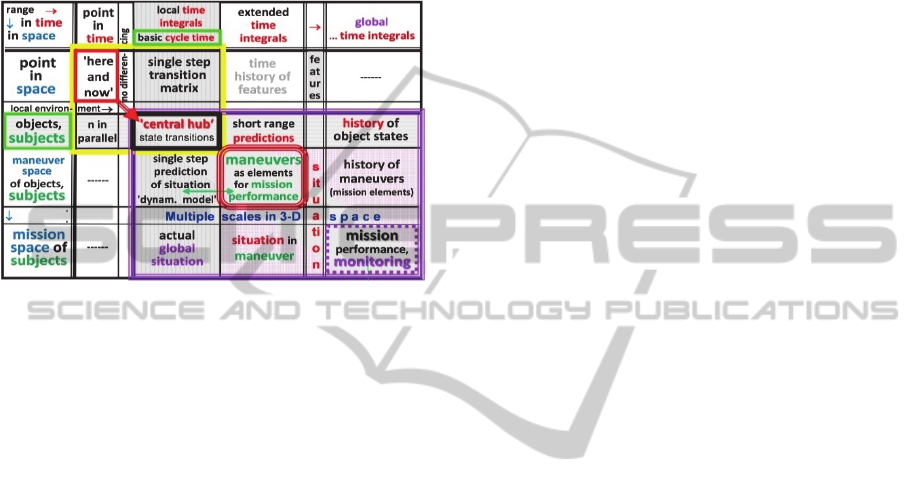
Figure 1 visualizes the ranges needed both in 3-D
space (vertical in first column, range elements in
blue) and in 1-D time (horizontal in first row, range
elements in red). All measurements are done at the
point ‘here and now’ in the upper left corner of the
yellow rectangle. Since the sensors are distributed
over the vehicle, usually, the effect of the dislocation
of each sensor from the center of gravity (cg) as the
point of reference for motion has to be taken into
account. The worst effect due to dislocation is
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
210
experienced in inertial sensing with accelerometers.
Their signals contain beside the acceleration at the
cg also components from rotational accelerations
and from centrifugal forces due to rotational speeds.
These signals, however, are available at almost no
time delay (microseconds range) and contain the
effects of any type of perturbations on the vehicle
body directly, like hitting a pothole or wind gusts.
Figure 1: Multiple scales in space (vertical) and time
(horizontal) for recognition and tracking of image features,
objects / subjects, and the situation in real-time image
sequences including results from inertial sensors.
On the contrary, video signals allow discovering
these perturbations only from careful observation of
integrals of these effects that are linked to temporal
derivatives of vehicle states (positions and angular
orientations); the analysis of image sequences
includes time delays of several video cycles (~ 0.1 to
0.3 sec.). In addition, high angular rates may lead to
motion blur in images. This is the reason why
advanced biological vision systems like those of
vertebrates have combined visual / inertial sub-
systems that allow exploiting the advantages and
avoiding the disadvantages of both systems used
separately. Negative feedback of inertial angular rate
data, sensed on the base of the gaze platform, onto
the commanded gaze direction reduces the
amplitudes of rotational perturbations in the images
by more than an order of magnitude, thereby
alleviating image interpretation (Dickmanns 2015).
On the other hand, the tendency towards drift errors
resulting from continuous integration of inertial rate
data can easily be counteracted by visual feedback
based on proper edge or corner features from
stationary objects far away. These properties of
combined interpretation of inertial and visual sensor
data may have given rise to developing a feeling
(and later on the notion) of time and temporal
integrals as essential elements of knowledge in
dynamic scene understanding of biological systems.
This aspect has been neglected in many approaches
to real-time machine vision for motion control.
Proper handling of delay times and corresponding
treatment of the effects of time integrals using
dynamical models has been an important ingredient
to the early successes of the 4-D approach to real-
time machine vision with low computing power.
Taking conventional measurement signals for
vehicle speed, distance traveled, and steer angle into
account in the framework of full dynamical models
even allows monocular motion stereo interpretation
at almost no extra cost. This is equivalent to the
highest level of ‘Self-Localization And Mapping’
(SLAM) and even more exact than the so called ‘6D
approach’ in this field (where the D means ‘degree
of freedom’ and not ‘dimension’ as in the 4-D
approach). The central hub shown in the center of
Figure 1, where the ‘object’-row and the center-
column representing ‘basic video cycle time’
intersect each other, combines all actual information
on objects perceived including the full state of the
own subject. Since in recursive estimation by
feedback of prediction errors of features temporal
differentiation of noisy sensor data is avoided
(horizontal center of the yellow rectangle) but a
smoothing integration step is used, this approach is
superior to inverse perspective projection based on
two consecutive images.
The standard nonlinear equations of perspective
projection are linearized around the actual state. The
so called ‘Jacobian matrix’ then linking parameters
of visual features linearly to object state components
has to be inverted for obtaining better state estimates
from prediction errors of features. This matrix is an
important knowledge element since it contains the
information how a feature will change in the image
if a state or shape component of the object is varied.
This is the reason why Extended Kalman Filtering
(EKF) for vision is preferred over particle filtering
or other variants if the objects in the scene are
known to sufficient detail; this check has to be done
on the level of task domains and of potential
situations encompassing a large number of different
objects and environmental conditions. Since this
involves large ranges in both space and time, it is
shown in Figure 1 in the lower right corner
(rectangle in magenta); here, only abstracted data
from n objects tracked in parallel and abstracted
situational data are of importance. By making the
transition from image data to objects, the volume of
data is reduced by two to three orders of magnitude,
hopefully without losing relevant information on
essential components in the scene. This allows
checking situations with many individual objects by
KnowledgeBasesforVisualDynamicSceneUnderstanding
211

referring to proper knowledge bases containing the
behavioral capabilities and possibly the preferences
of subjects in certain conditions. Three levels of
knowledge bases linked to the main diagonal of
Figure 1 will be discussed below.
2.2 Visual Features
At the point ‘here & now’ primary feature detection
can be done purely bottom-up without reference to
previous images; only local neighborhoods in the
image plane are taken into account. This yields
features like: 1. local regions with nonplanar
intensity distributions, shown in Figure 2 in white; 2.
edge elements, shown in red (vert. search) and green
(hor. search), 3. Corners (blue crosses), and 4. larger
regions with homogeneous gray shading, (colors or
textures have not been evaluated in Figure 2).
Many types of additional features derived from
object hypotheses may be used during tracking
phases in a feedback mode of prediction-errors using
recursive estimation methods. Typical examples are
to look for wheels (usually parts of ellipses) and tires
(dark) or for groups of head- and backlights relative
to the position of vehicle bodies.
2.3 Objects / Subjects in Motion
A human observer looking at the synthetic image in
Figure 2 cannot but immediately recognize a three-
lane road with heavy traffic. The gray regions in the
lower part (‘nearby’) with typical ‘lane markings’
(both the white local regions as locations of non-
planar gray value distribution and the red-colored
edge elements within them, forming almost-straight
longer line segments) enforce this interpretation. For
an experienced human driver seven objects above
the road are readily detected. Usually it takes three
to seven video cycles (~ 0.1 to ~ 0.3 seconds) to
achieve a stable interpretation with small sums of
squared prediction errors in road scenes.
Figure 2: Scene with dense traffic made up of five types of
features (no single pixels!).
The additional degrees of freedom of subjects
relative to ‘objects proper’ require that for scene
understanding the latter and ‘subjects’ have to be
treated differently. While for ‘objects proper’
knowledge about laws of motion is sufficient, for
subjects the self-decided variation of movements is
an additional degree of complexity for adequate
perception and understanding of motion processes.
The distinction for dynamical systems between
state variables and control variables, introduced by
Caratheodory in the first half of the last century for
treating optimal control problems, may be the key to
better understanding of movements of subjects. The
following definition holds: State variables in a
dynamical system are all those variables, the value
of which cannot be changed at one point in time;
they evolve over time with differential equations
describing the constraints holding. If formulated
properly, the state variables contain all effects of the
past. Only the actual state and the control variables −
to be chosen freely (within limits) at each moment −
determine its future development. It is interesting to
note that the presence of control variables in
dynamical systems is a precondition for developing
a free will. If there is no control variable available in
a system, its future development cannot be
influenced (and thus ‘free will’ is meaningless).
On the other side, if there are no measurement
data available, there is no base for proper decision
making and application of behaviors in the (then
unknown) environment given. Thus, the ‘sensing –
acting loop closures’ are the driving factors for
‘mental data processing of subjects’. Beside body
shape and articulation as well as kind of locomotion
it is the capability of sensing and data processing
that determines the class of subjects among animals.
A rather direct link from sensed data to control
actuation is dubbed a reflex. The idea of evolution is
that during this process more and more senses have
developed providing various data in parallel. Those
animals that happened to use them in a fashion
leading to superior results for their survival in the
environment encountered, had better chances to
generate more descendants and to spread. Combined
use of data from separate paths must have been one
important step of development. This process has
generated a multitude of classes of living beings.
Most of them developed specialized organs for the
combination of sensor data and finally the brain.
Visual perception of the environment plays a
dominant role in the development of cognitive
capabilities. In the neural systems of vertebrates,
data processing and cognition is based on temporal
processes in billions of neurons with very many
cross-connections. Detailed functioning of this very
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
212
complex biochemical / electrical network is yet
widely unknown. However, it seems likely that
frequently observed typical motion processes of
other objects or subjects form part of the knowledge
base for understanding of situations. In biological
systems these maneuvers are learned by repeated
observation or by own exercises.
Especially in the latter case it is not the trajectory
of the body and the limbs that are learned but the
time history of the control output leading to these
trajectories. This procedure is a much more efficient
encoding of the maneuver for application since it
concentrates on those variables that are the only
ones to be changed directly. Guiding a road vehicle
for a lane change thus does not require a trajectory
to be stored (with ~ half a dozen state variables over
extended ranges in time) but just the (parameterized)
time history of the one control variable “steer angle
rate” to be applied. Properly scaled, in the nominal
case without perturbations, this needs less than a
dozen numbers for the entire maneuver.
Since in the real world perturbations both in the
environment (cross-winds, road sloping, pot holes,
etc.) and in the perception system are more the rule
than an exception, superimposed feedback control
for counteracting these effects is mandatory. The
reference trajectory for this feedback component can
be computed online from the nominal parameters
actually used in the dynamical model of the
maneuver. With little additional computing effort
this also provides the coefficients for linear state
feedback control that yields acceptable eigenvalues
for the closed-loop system due to the knowledge
stored in the dynamical model (Dickmanns 2007).
2.4 Situations in Task Domains
A ‘situation’ is defined as the complete collection of
all conditions relevant for decision making for a
subject. It encompasses all relevant environmental
conditions in the task domain: Weather conditions,
lighting- and visibility conditions, surface conditions
for ground vehicles, local geometrical structure and
objects around. In all cases the mission to be
performed and its decomposition into a list of
consecutive mission elements and maneuvers are
stored symbolically; timing conditions for transitions
and the own health state are of importance. All
potential situations constitute such a tremendous
volume that subdivision into specific task domains is
mandatory. In human society, this and the limited
capabilities of single individuals are the reason for
the development of the many existing professions.
Within each task domain there are characteristic
missions to be performed; each mission can be
subdivided into a sequence of mission elements that
can be treated with the same set of behavioral
components. Certain maneuvers are characteristic
for specific mission elements and for the transition
between those; their proper representation is
essential for efficient overall systems.
There is also a need for evaluating the
performance levels achieved and for keeping track
of their changes over time under different
environmental conditions (both improvements and
deteriorations). These values form the basis for
adapting maneuver parameters and for selecting
maneuvers in the future in accordance with the
situation encountered. This constitutes learning of
(dynamical) behavioral components; learning which
one of these parameter sets should be used in which
situations is what constitutes ‘experience in the
field’. This experience allows recognizing snapshots
as part of a process; on this basis expectations can be
derived that allow a) focusing attention in feature
extraction on special events (like occlusion or
uncovering of features in certain regions of future
images) or b) increased resolution in some region of
the real world by gaze control for a multifocal
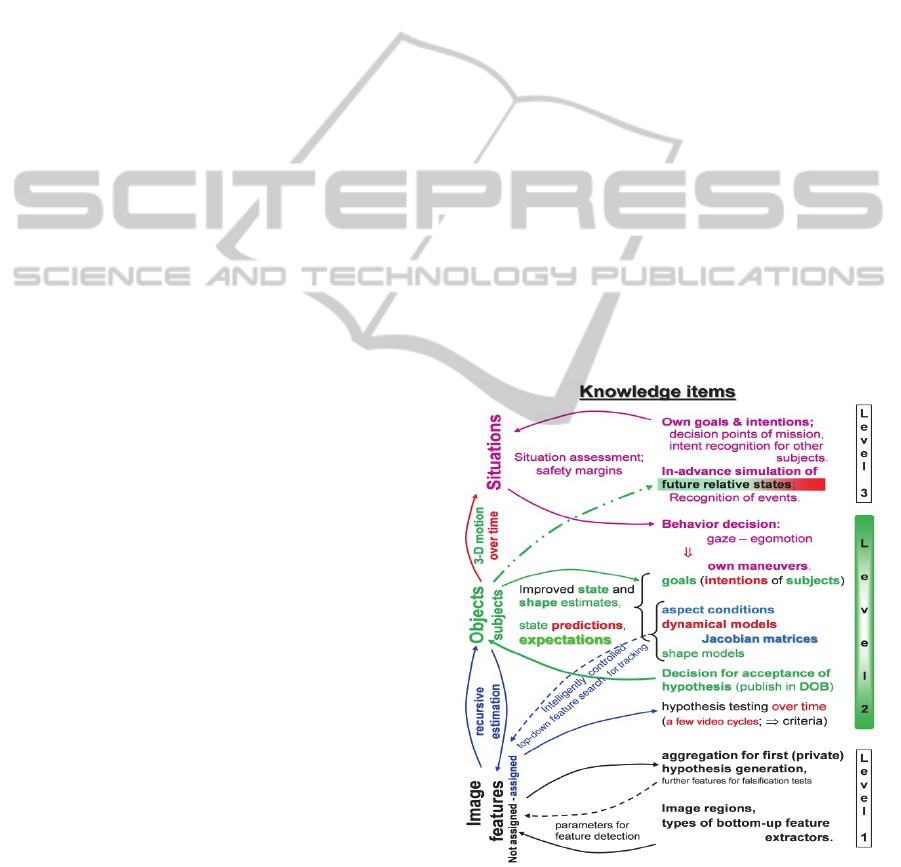
system (dashed curves in lower left of Figure 3).
Figure 3: Information flow between the three levels of
knowledge representation in dynamic vision.
Crucial situation-dependent decisions have to be
made for transitions between mission phases where
switching between behavioral capabilities for
KnowledgeBasesforVisualDynamicSceneUnderstanding
213

maneuvers is required. That is why representation of
specific knowledge for ‘maneuvers’ is important
(rounded central red block within the rectangle in
the lower right corner of Figure 1).
3 THREE LEVELS IN PARALLEL
As mentioned previously, the levels discussed
separately above have to be treated in parallel with
continuous feedback between them. Figure 3
sketches the information flow. At the base are
consecutive image evaluation processes independent
of temporal aspects. However, a component for the
generation of object hypotheses has to be available
interpreting collections of features that might stem
from the same real-world object. Initially, this
hypothesis is kept locally private for testing over the
next few video cycles. Only after the sum of the
squared prediction errors remains below a threshold,
the hypothesis is made public in the perception
system by inserting it into the scene tree
representing the relative states by homogeneous
coordinates. This makes the objects available to
situation-level 3. [For more detailed discussions see
(IV’00, 2000), Chap. 13 of (Dickmanns 2007), and
www.dyna-vision.de ].
With the object states given in the scene tree and
with the actions of subjects assumed to be
performed, a single-step prediction of the states for
the next point in time of measurements is computed
(text in red in Figure 3). This allows intelligent
control of top-down feature search (dashed arrow in
blue). For objects of special interest, longer range
predictions may be made for extended situation
analysis (green dash-dotted arrow) to the top level 3.
There may be separate routines for perceiving and
representing environmental conditions that may need
evaluation of special features (like decreasing
contrast with visual range under foggy conditions).
At the situation level (top in Figure 3), all of this
information is evaluated in conjunction, and the
result is communicated to the two sublevels for
control of gaze direction and own locomotion in the
mission context.
4 SUMMARY OF POSITION
Experience in joint use of procedural methods from
‘Control Engineering’ and declarative methods from
‘Artificial Intelligence’ for processing of image
sequences and for scene understanding has led to the
proposal to expand the knowledge base for dynamic
real-time vision and control of actions by a specific
component for ‘maneuvers’: Such a component for
the transition from state S
1
(t
1
) to S
2
(t
2
) contains for
each of these mission element (S
1
to S
2
) in task
domains the following information:
The nominal control time histories u(·);
the dynamical model for generating the nominal
trajectories of the state variables;
code for generating the coefficients of feedback
control laws for counteracting perturbations,
conditions under which the maneuver may be
used with which set of parameters.
Codes for evaluating pay-off functions that allow
judging the quality of the maneuver performed.
This process-oriented approach geared to the control
variables of dynamical systems is more efficient
than centering on state variables.
REFERENCES
Christensen H. I., Nagel H.-H. (eds.), 2006. Cognitive
Vision Systems – Sampling the Spectrum of
Approaches. Springer, (367 papes).
Dickmanns, E.D., 2007. Dynamic Vision for Perception
and Control of Motion. Springer (474 pages).
Dickmanns, E.D., 2015. BarvEye: Bifocal active gaze
control for autonomous driving. (this volume).
“ , Graefe, V., 1988. a) Dynamic monocular machine
vision. Machine Vision and Applications, Springer
International, Vol. 1, pp 223-240. b) Applications of
dynamic monocular machine vision. pp 241-261.
Gallese V., Goldman A. 1998. Mirror Neurons and the
Simulation Theory of Mind-reading. Trends in Cogn.
Sci.2, pp 493-501.
IV’00, 2000. Proc. Internat. Symp. on Intelligent Vehicles,
Dearborn (MI), with six contributions to Expectation-
based, Multi-focal, Saccadic (EMS-) vision:
1. Gregor R. et al.: EMS-Vision: A Perceptual System for
Autonomous Vehicles.
2. Gregor R., Dickmanns E.D.: EMS-Vision: Mission
Performance on Road Networks.
3. Hofmann U.; Rieder A., Dickmanns, E.D.: EMS-
Vision: Applic. to ‘Hybrid Adaptive Cruise Control’.
4. Luetzeler M., Dickmanns E.D.: EMS-Vision: Recog-
nition of Intersections on Unmarked Road Networks.
5. Pellkofer M., Dickmanns E.D.: EMS-Vision: Gaze
Control in Autonomous Vehicles.
6. Siedersberger K.-H., Dickmanns E.D.: EMS-Vision:
Enhanced Abilities for Locomotion.
Kalman, R. D. 1960. A new approach to linear filtering
and prediction problems. Trans. ASME, Series D,
Journal of Basic Engineering, pp 35–45.
Kiverstein J.D., 2005. Naturalism and Phenomenology.
Diss. Univ. Edinborough.
Leontyev A. N. 2009. The Development of Mind.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
214

(Selected Works). Marxists Internet Archive. Printed
by Bookmasters, Inc., Ohio.
Noe Alva 2004. Action in Perception. Cambridge, MA;
MIT Press.
Vernon D., 2006. The Space of Cognitice Vision. In
Christensen and Nagel (eds.), pp 7-24.
KnowledgeBasesforVisualDynamicSceneUnderstanding
215
