
Does Inverse Lighting Work Well under Unknown Response Function?
Shuya Ohta and Takahiro Okabe
Department of Artificial Intelligence, Kyushu Institute of Technology, Iizuka, Japan
Keywords:
Single-image Understanding, Inverse Lighting, Response Function, Lambertian Model.
Abstract:
Inverse lighting is a technique for recovering the lighting environment of a scene from a single image of an
object. Conventionally, inverse lighting assumes that a pixel value is proportional to radiance value, i.e. the
response function of a camera is linear. Unfortunately, however, consumer cameras usually have unknown and
nonlinear response functions, and therefore conventional inverse lighting does not work well for images taken
by those cameras. In this study, we propose a method for simultaneously recovering the lighting environment
of a scene and the response function of a camera from a single image. Through a number of experiments using
synthetic images, we demonstrate that the performance of our proposed method depends on the lighting dis-
tribution, response function, and surface albedo, and address under what conditions the simultaneous recovery
of the lighting environment and response function works well.
1 INTRODUCTION
Humans seem to extract rich information about an ob-
ject of interest even from a single image of the object.
Since the dawn of computer vision, understanding a
single image is one of the most important and chal-
lenging research tasks.
The appearance of an object depends on the shape
and reflectance of the object as well as the lighting
environment of a scene. From the viewpoint of physi-
cal image understanding, this means that the problem
of single-image understanding results in recovering
those three descriptions of a scene from a single im-
age. Unfortunately, however, such a problem is terri-
bly underconstrained;we havemultiple unknownsbut
only a single constraint per pixel. Therefore, conven-
tional techniques such as shape from shading (Horn,
1986) assume that two out of the three descriptions
are known and then recover the remaining one.
One direction of generalization of single-image
understanding is to recover two or three descriptions
from a single image. For example, Romeiro and Zick-
ler (Romeiro and Zickler, 2010) propose a method for
simultaneously recovering the reflectance of an object
and the lighting environment of a scene from a sin-
gle image of the object with known shape (sphere).
Barron and Malik (Barron and Malik, 2012) propose
a method for simultaneously recovering the shape,
albedo, and lighting environment from a single im-
age. Those methods exploit the priors, i.e. the statisti-
cal models of those descriptions, and search the most
likely explanation of a single image.
In this study, we focus on single-image under-
standing under unknown camera properties, that is
another direction of generalization. Existing meth-
ods for single-image understanding assume that a sin-
gle image is taken by an ideal camera and ignore the
effects of in-camera processing. They represent the
pixel values of the image as a function with respect
to the descriptions of a scene, i.e. shape, reflectance,
and lighting environment, and then recover some of
those descriptions from a single image. On the other
hand, we assume that a single image is taken by a
consumer camera and take in-camera processing in
particular tone mapping into consideration. We rep-
resent the pixel values of the image as a function with
respect to both the scene descriptions and the proper-
ties of a camera and camera setting, and then address
the recovery of scene descriptions from a single im-
age under unknown camera properties.
Inverse lighting (Marschner and Greenberg, 1997)
is a technique for recovering the lighting environment
of a scene from a single image under the assumptions
that the shape and reflectance (or basis images) of the
scene are known. Comparing with active techniques
using devices such as a spherical mirror (Debevec,
1998) and a camera with a fish-eye lens (Sato et al.,
1999) placed in a scene of interest, inverse lighting
is a passive technique and therefore could recover the
lighting environment from a given image taken even
in the past, although it is applicable to scenes with
relatively simple shape and reflectance.
Conventionally, inverse lighting assumes that a
pixel value is proportional to a radiance value at the
652
Ohta S. and Okabe T..
Does Inverse Lighting Work Well under Unknown Response Function?.
DOI: 10.5220/0005344406520657
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 652-657
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

corresponding point in a scene. The relationship be-
tween radiance values and pixel values is described
by a radiometric response function, and the above as-
sumption means that the response function of a cam-
era is linear. Unfortunately, however, consumer cam-
eras usually have nonlinear response functions in or-
der to improve perceived image quality via tone map-
ping (Grossberg and Nayar, 2003). Therefore, con-
ventional inverse lighting requires a machine-vision
camera with a linear response function or radiometric
calibration of a response function in advance.
Accordingly, we propose a method for recover-
ing the lighting environment of a scene from a single
image taken by a camera with an unknown and non-
linear response function. Our proposed method also
assumes that the shape and reflectance of an object
are known, and then simultaneously estimates both
the lighting environment of a scene and the response
function of a camera from a single image. Specifi-
cally, our method represents a lighting distribution as
a linear combination of the basis functions for light-
ing and also represents a response function as a linear
combination of the basis functions for response, and
then estimates those coefficients from a single image.
We conduct a number of experiments using synthetic
images, and investigate the stability of our method.
We demonstrate that the performance of our method
depends on the lighting environment, response func-
tion, and surface albedo, and show experimentally un-
der what conditions the simultaneous recovery of the
lighting environment and response function from a
single image works well.
The main contribution of this study is twofold;
(i) the novel method for simultaneously recovering
the lighting environment of a scene and the response
function of a camera from a single image, and (ii) em-
pirical insights as to under what conditions inverse
lighting from a single image with an unknown re-
sponse function works well.
2 INVERSE LIGHTING
In this section, we explain the framework of in-
verse lighting on the basis of the original work by
Marschner and Greenberg (Marschner and Green-
berg, 1997). Inverse lighting assumes that the shape
and reflectance of an object are known, and then re-
covers the lighting environment of a scene from a sin-
gle image of the object. We assume that the object is
illuminated by a set of directional light sources, and
describe the intensity of the incident light from the di-
rection (θ, φ) to the object as L(θ, φ). Here, θ and φ
are the zenith and azimuth angles in the spherical co-
ordinate system centered at the object. Hereafter, we
call L(θ, φ) a lighting distribution.
Specifically, we represent a lighting distribution
L(θ, φ) by a linear combination of basis functions as
L(θ, φ) =
N
∑
n=1
α
n
L
n
(θ, φ), (1)
where α
n
and L
n
(θ, φ) (n = 1, 2, 3, ..., N) are the coef-
ficients and basis functions for lighting. Then, based
on the assumption of known shape and reflectance,
we synthesize the basis images, i.e. the images of
the object when the lighting distributions are equal to
the basis functions for lighting L
n
(θ, φ). We denote
the p-th (p = 1, 2, 3, ..., P) pixel value of the n-th ba-
sis image by R
p
(L
n
). According to the superposition
principle, the p-th pixel value of an input single image
I
p
(p = 1, 2, 3, ..., P) is described as
I
p
=
N
∑
n=1
α
n
R
p
(L
n
). (2)
This means that we obtain a single constraint on the
coefficients of lighting per pixel.
Rewriting the above constraints in a matrix form,
we obtain
.
.
.
I
p
.
.
.
=
.
.
.
. . . R
p
(L
n
) . . .
.
.
.
.
.
.
α
n
.
.
.
,(3)
I = Rα. (4)
Since the P × N matrix R is known and the number
of pixels (constraints) P is larger than the number of
basis functions (unknowns) N in general, we can es-
timate the coefficients of lighting α by solving the
above set of linear equations. Specifically, the coeffi-
cients are computed by using the pseudo inverse ma-
trix R
+
as
α = R
+
I = (R
⊤
R)
−1
R
⊤
I, (5)
if R is full rank, i.e. the rank of R is equal to N.
This solution is equivalent to that of the least-square
method;
α = argmin
ˆα
P
∑
p=1
"
I
p
−
N
∑
n=1
ˆ
α
n
R
p
(L
n
)
#
2
. (6)
Once the coefficients of lighting α are computed,
we can obtain the lighting distribution by substituting
them into eq.(1).
3 PROPOSED METHOD
In this section, we propose a method for simultane-
ously recovering both the lighting environment of a
DoesInverseLightingWorkWellunderUnknownResponseFunction?
653

scene and the response function of a camera from a
single image taken under an unknown and nonlinear
response function.
3.1 Representation of Lighting
Distribution
Our proposed method assumes that the shape of an
object is convex and the reflectance obeys the Lam-
bertian model, and then recovers the lighting dis-
tribution of a scene on the basis of the diffuse re-
flection components observed on the object surface.
It is known that the image of a convex Lambertian
object under an arbitrary lighting distribution is ap-
proximately represented by a linear combination of
9 basis images when low-order spherical harmonics
Y
lm
(θ, φ) (l = 0, 1, 2; m = −l, −l + 1, ..., l − 1, l) are
used as the basis functions for lighting (Ramamoorthi
and Hanrahan, 2001). For the sake of simplicity, we
denote the spherical harmonics Y
lm
(θ, φ) by Y
n
(θ, φ),
where n = (l + 1)
2
− l + m.
Substituting the spherical harmonics into eq.(1), a
lighting distribution L(θ, φ) is represented as
L(θ, φ) =
9
∑
n=1
α
n
Y
n
(θ, φ). (7)
In a similar manner to eq.(2), the p-th pixel value of
the n-th basis image is represented as
I
p
=
9
∑
n=1
α
n
R
p
(Y
n
). (8)
Note that the pixel value I
p
is equivalent to the radi-
ance value when the response function of a camera is
linear.
The reason why the image of a convex Lamber-
tian object under an arbitrary lighting distribution is
approximated by using low-order spherical harmon-
ics is that high-frequency components of a lighting
distribution have no/little contribution to pixel val-
ues. In an opposite manner, we cannot recover the
high-frequency components of a lighting distribu-
tion from pixel values (Ramamoorthi and Hanrahan,
2001). This is the limitation of inverse lighting from
diffuse reflection components.
3.2 Representation of Response
Function
The radiance values of a scene are converted to pixel
values via in-camera processing such as demosaicing,
white balancing, and tone mapping. In this study, we
focus on tone mapping because it is widely used in
consumer cameras in order to improve perceived im-
age quality and the pixel values converted by tone
mapping are significantly different from the radiance
values as shown in Figure 1 (a) and (b). As men-
tioned in Section 1, the relationship between radiance
values and pixel values is described by a radiometric
response function. In general, the response function
depends on cameras and camera settings.
Let us denote a response function by f , and as-
sume that a radiance value I is converted to a pixel
value I
′
by using the response function as I
′
= f(I).
Since the response function is monotonically increas-
ing, there exists the inverse of f, i.e. an inverse re-
sponse function g. The inverse response function con-
verts a pixel value I
′
to a radiance value I as I = g(I
′
),
and therefore has 255 degrees of freedom for 8-bit
images. Such a high degree of freedom makes the si-
multaneous recovery of a lighting distribution and a
response function from a single image intractable.
Accordingly, our proposed method uses an ef-
ficient representation of response functions by con-
straining the space of response functions on the basis
of the statistical characteristics. Specifically, we make
use of the EMoR (Empirical Model of Response) pro-
posed by Greenberg and Nayar (Grossberg and Nayar,
2003). They apply PCA to the dataset of response
functions, and show that any inverse response func-
tion is approximately represented by a linear combi-
nation of basis functions as
I = g(I
′
) = g
0
(I
′
) +
M
∑
m=1
β
m
g
m
(I
′
). (9)
Here, β
m
and g
m
(I
′
) are the coefficients and basis
functions for response. Since the inverse response
function is also monotonically increasing, the coef-
ficients has to satisfy
g
0
(I
′
)+
M
∑
m=1
β
m
g
m
(I
′
) < g
0
(I
′
+1)+
M
∑
m=1
β
m
g
m
(I
′
+1),
(10)
where I
′
= 0, 1, 2, ..., 254 for 8-bit images.
3.3 Simultaneous Recovery
Substituting eq.(9) into the left-hand side of eq.(8),
we can derive
g
0
(I
′
p
) =
9
∑
n=1
α
n
R
p
(Y
n
) −
M
∑
m=1
β
m
g
m
(I
′
p
), (11)
i.e. a single constraint on the coefficients of lighting
and response per pixel. We can rewrite the abovecon-
straints in a matrix form as
g
0
= (R|G)
α
β
, (12)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
654
where g
0
= (g
0
(I
′
1
), g
0
(I
′
2
), ··· , g
0
(I
′
P
))
⊤
and G is a
P× M matrix;
G =
.
.
.
··· −g
m
(I
′
p
) ···
.
.
.
. (13)
If the P × (9+ M) matrix (R|G) is full rank, i.e. the
rank of (R|G) is (9+ M), we can compute both the co-
efficients of the lighting distribution and those of the
response function by using its pseudo inverse matrix
in a similar manner to Section 2;
α
β
= (R|G)
+
g
0
. (14)
This solution is equivalent to that of the least-
square method;
{α, β} = argmin
ˆα,
ˆ
β
P
∑
p=1
"
g
0
(I
′
p
)−
9
∑
n=1
ˆ
α
n
R
p
(L
n
)+
M
∑
m=1
ˆ
β
m
g
m
(I
′
p
)
#
2
.(15)
Since the response function is monotonically increas-
ing, we solve eq.(15) subject to eq.(10). We used the
MATLAB implementation of the trust-region reflec-
tive algorithm for optimization. In the experiments,
we set M = 5. Once the coefficients of lighting α and
those of response β are computed, we can obtain the
lighting distribution and response function by substi-
tuting them into eq.(7) and eq.(9).
In order to make the simultaneous recovery of
lighting and response more stable, we can incorpo-
rate the priors of lighting distributions and response
functions into the optimization. For example, we can
add the smoothness term with respect to the response
function
w
255
∑
l=1
"
∂
2
g(I
′
)
∂I
′2
I
′
=
l
255
#
2
(16)
to eq.(15), where w is a parameter that balances the
likelihood term and the smoothness term. In our pre-
liminary experiments, we tested some simple priors
and found that we often need to fine-tune the param-
eters of the priors according to input images. There-
fore, we do not use any priors in this study and investi-
gate the stability of the linear least-square problem in
eq.(15) with the linear constraints in eq.(10) instead.
4 EXPERIMENTS AND
DISCUSSION
In this section, we conduct a number of experiments
using synthetic images, and investigate the stability
0
100
200
300
400
500
600
0 50 100 150 200 250
Frequency
Pixel Value
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Radiance Value
Pixel Value
(a) (b) (c)
(d) (e) (f)
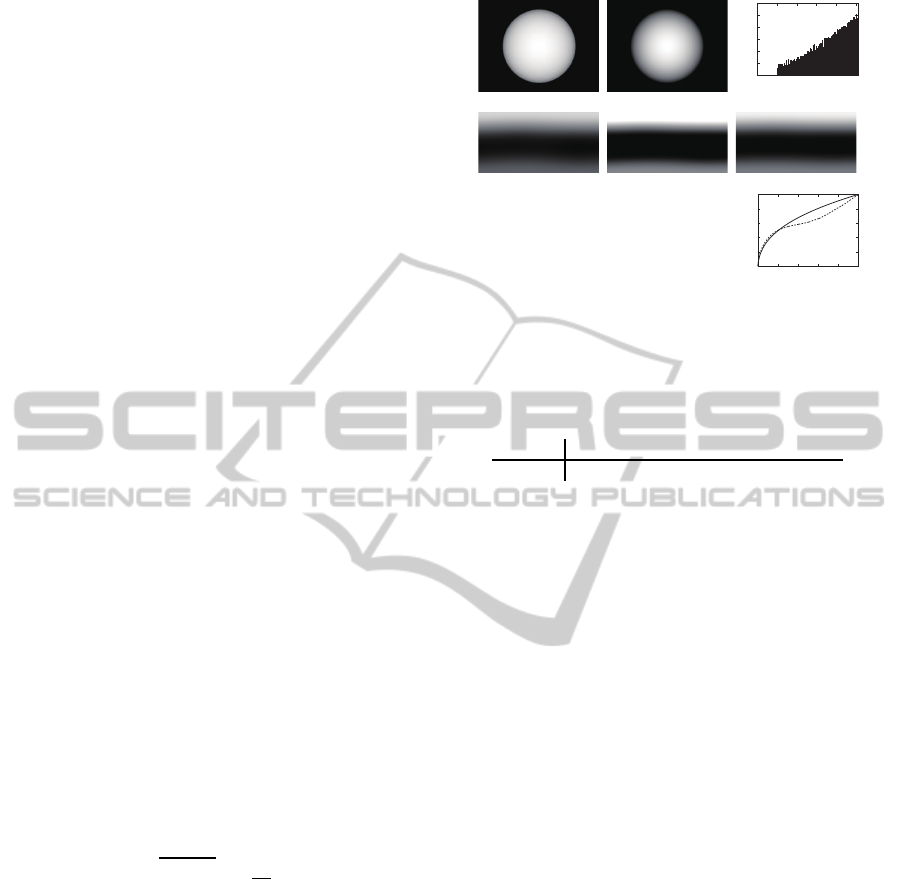
(g)
Figure 1: Recovered lighting distributions and response
function from a single image of an object under a single
directional light source.
Table 1: The RMS errors of the estimated response func-
tions.
Case
A B C D E
RMSE 0.09 0.10 0.54 0.04 0.13
of our proposed method. We can see from eq.(12) and
eq.(14) that the stability of our method is described by
the full rankness of the matrix (R|G) or the condition
number of the pseudo inverse matrix (R|G)
+
.
Each column of the sub-matrix R corresponds to
a basis image of an object illuminated by spherical-
harmonics lighting. It is known that the basis images
are orthogonal to each other if the surface normals
of the object distribute uniformly on a unit sphere
because spherical harmonics are orthonormal basis
functions on a unit sphere (Ramamoorthi and Han-
rahan, 2001). Intuitively, inverse lighting works well
for spherical objects but does not work for planar ob-
jects. In this study, we assume spherical objects and
therefore the sub-matrix R is full rank.
Each column of the sub-matrix G corresponds to
an eigenvector of response functions, and therefore
the columns are orthogonal to each other if the pixel
valuesin a single image distribute uniformly from 0 to
255. Intuitively, the simultaneous recovery of lighting
distribution and response function works well when
the histogram of the pixel values is uniform. Because
the pixel values in the image of a spherical object de-
pend on the lighting distribution of a scene, the re-
sponse function of a camera, and the surface albedo
of the object, we demonstrate how the performance
of our method changes depending on the lighting dis-
tribution, response function, and surface albedo.
Case A:
In Figure 1, we show images of a sphere under a
single directional light source with a linear response
function (a) and with a nonlinear response function
DoesInverseLightingWorkWellunderUnknownResponseFunction?
655
(a) (b) (c)
(d) (e) (f)
(g)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0 50 100 150 200 250
Frequency
Pixel Value
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Radiance Value
Pixel Value
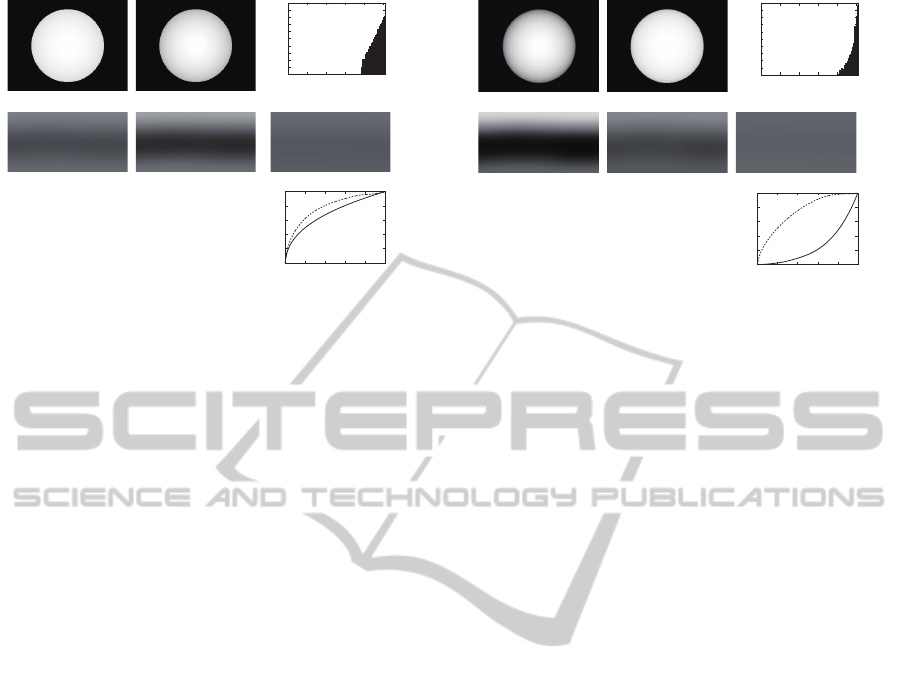
Figure 2: Results when only the lighting distribution is dif-
ferent from Figure 1.
(b). The histogram of the pixel values in the tone-
mapped image (b) is shown in (c). Figure 1 (d) shows
the lighting distribution estimated from the linear im-
age (a) by using the conventional method assuming a
linear response function (see Section 2). Here, the
lighting distribution L(θ, φ) is represented by a 2D
map whose vertical and horizontal axes correspond
to the zenith angle θ and azimuth angle φ respec-
tively. Figure 1 (e) and (f) show the lighting distri-
butions estimated from the tone-mapped image (b)
by using the conventional method and our proposed
method respectively. In Figure 1 (g), the solid and
dotted lines stand for the ground truth and estimated
response function by using our method.
We can see that the lighting distribution estimated
by using our proposed method (f) looks more sim-
ilar to (d) than that estimated by using the conven-
tional method (e). Since inverse lighting based on dif-
fuse reflection components cannot estimate the high-
frequency components of a lighting distribution as
mentioned in Subsection 3.1, (d) is considered to
be the best possible result. Therefore, those results
demonstrate that our method works better than the
conventional method for the tone-mapped image. In
addition, (g) demonstrates that the response function
estimated by using our method is similar to the ground
truth in some degree. The root-mean-square (RMS)
errors of the estimated response functions are shown
in Table 1.
Case B:
In Figure 2, we show the results when only the light-
ing distribution is different from Figure 1. Specif-
ically, a single directional light source and a uni-
form ambient light are assumed. Comparing the light-
ing distributions estimated by using the conventional
method (e) and our proposed method (f) with the best
possible result (d), we can see that our method out-
(a) (b) (c)
(d) (e) (f)
(g)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0 50 100 150 200 250
Frequency
Pixel Value
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Radiance Value
Pixel Value
Figure 3: Results when only the response function is differ-
ent from Figure 1.
performs the conventional method. In addition, (g)
shows that the response function estimated by using
our method is similar to the ground truth in some de-
gree.
Those results demonstrate that the performance of
our method depends on lighting distributions. Al-
though the performance of our method is not perfect,
our method works well for both the case A and the
case B, and outperforms the conventional method.
Case C:
In Figure 3, we show the results when only the re-
sponse function is different from Figure 1. Compar-
ing (e) and (f) with (d), it is clear that our method
does not work well. In addition, (g) shows that the
response function estimated by using our method is
completely different from the ground truth.
Those results demonstrate that the performance of
our method depends also on response functions and
that our method does not work well for the case C.
The histogram of the pixel values in the tone-mapped
image (c) shows that the range of pixel values is sig-
nificantly reduced due to the tone mapping. Compar-
ing Figure 1 (g) with Figure 3 (g), we can see that the
simultaneous recovery works well when the inverse
response function is convex upward, i.e. expands the
range of pixel values, but does not work well when it
is convex downward, i.e. shrinks the range of pixel
values.
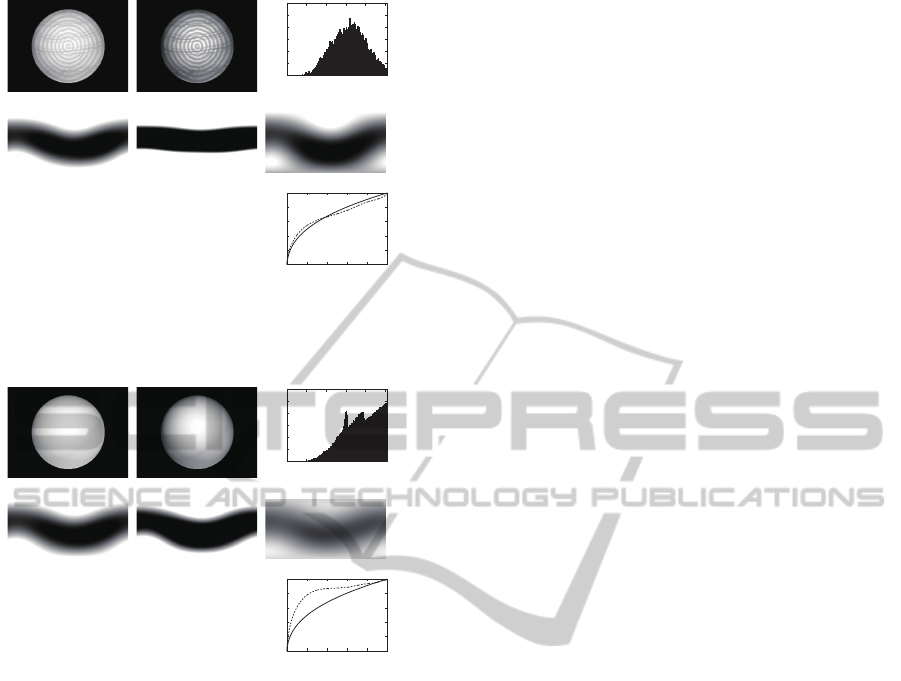
Case D:
In Figure 4, we show the results when the image of
a textured sphere under four directional light sources
is used. Comparing (e) and (f) with (d), we can see
that our method works better than the conventional
method. In addition, (g) shows that our method can
estimate the response function accurately.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
656
(a) (b) (c)
(d) (e) (f)
(g)
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Radiance Value
Pixel Value
0
100
200
300
400
500
600
0 50 100 150 200 250
Frequency
Pixel Value
Figure 4: Recovered lighting distributions and response
function from a single image of a textured object under four
directional light sources.
(a) (b) (c)
(d) (e) (f)
(g)
0
100
200
300
400
500
600
0 50 100 150 200 250
Frequency
Pixel Value
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Radiance Value
Pixel Value
Figure 5: Results when only the surface albedo is different
from Figure 4.
Case E:
In Figure 5, we show the results when only the sur-
face albedo is different from Figure 4. Comparing (e)
and (f) with (d), we can see that our method does not
necessarily work well. In addition, (g) shows that the
response function estimated by using our method de-
viates from the ground truth to some extent.
Those results demonstrate that the performance of
our method depends also on the surface albedo of an
object and that our method works better for textured
objects. The effects of texture can be explained as
follows. First, non-uniform albedo makes the distri-
bution of pixel values diverse. Second, more impor-
tantly, two pixels with similar surface normals but dif-
ferent reflectance values yield a strong constraint on
the response function. Since the irradiance values at
the pixels with similar surface normals are also simi-
lar to each other, the radiance values converted from
the pixel values at those pixels by using the inverse
response function should be proportional to their re-
flectance values.
5 CONCLUSION AND FUTURE
WORK
In this study, we extended inverse lighting by tak-
ing an unknown and nonlinear response function of a
camera into consideration, and proposed a method for
simultaneously recovering the lighting environment
of a scene and the response function of a camera from
a single image of an object. Through a number of
experiments, we demonstrated that the performance
of our proposed method depends on the lighting dis-
tribution, response function, and surface albedo, and
addressed under what conditions the simultaneous re-
covery works well.
One of the future directions of this study is to in-
corporate sophisticated priors in order to make the si-
multaneous recovery more stable. Another direction
is to make use of other cues such as specular reflec-
tion components and cast shadows in order to recover
high-frequency components of a lighting distribution.
ACKNOWLEDGEMENTS
A part of this work was supported by JSPS KAK-
ENHI Grant No. 26540088.
REFERENCES
Barron, J. and Malik, J. (2012). Shape, albedo, and illumi-
nation from a single image of an unknown object. In
Proc. IEEE CVPR2012, pages 334–341.
Debevec, P. (1998). Rendering synthetic objects into real
scenes: bridging traditional and image-based graphics
with global illumination and high dynamic range pho-
tography. In Proc. ACM SIGGRAPH’98, pages 189–
198.
Grossberg, M. and Nayar, S. (2003). What is the space
of camera response functions? In Proc. IEEE
CVPR2003, pages 602–609.
Horn, B. (1986). Robot vision. MIT Press.
Marschner, S. and Greenberg, D. (1997). Inverse lighting
for photography. In Proc. IS&T/SID Fifth Color Imag-
ing Conference, pages 262–265.
Ramamoorthi, R. and Hanrahan, P. (2001). A signal-
processing framework for inverse rendering. In Proc.
ACM SIGGRAPH’01, pages 117–128.
Romeiro, F. and Zickler, T. (2010). Blind reflectometry. In
Proc. ECCV2010, pages 45–58.
Sato, I., Sato, Y., and Ikeuchi, K. (1999). Acquiring a radi-
ance distribution to superimpose virtual objects onto a
real scene. IEEE TVCG, 5(1):1–12.
DoesInverseLightingWorkWellunderUnknownResponseFunction?
657
