
An Economic Approach for Generation of Train Driving Plans using
Continuous Case-based Planning
Andr´e P. Borges
1
, Osmar B. Dordal
1
, Richardson Ribeiro
2
, Br´aulio C.
´
Avila
1
and Edson E. Scalabrin
1
1
Programa de P´os-Graduac¸ ˜ao em Inform´atica, Pontif´ıcia Universidade Cat´olica do Paran´a,
Rua Imaculada Conceic¸˜ao 1155, Curitiba, Paran´a, Brazil
2
Department of Informatics (DAINF), Federal University of Technology-Parana,
Via do Conhecimento, Km 1, Pato Branco, Paran´a, Brazil
Keywords:
Case-based Planning, Driving Plans.
Abstract:
We present an approach for reusing and sharing train driving plans P using continuous (or without human
intervention) Case-Based Planning (CBP). P is formed by a set of actions, which when applied, can move a
train in a stretch of railroad. This is a complex task due to the variations in the (i) composition of the train,
(ii) environmental conditions, and (iii) stretches travelled. To overcome these difficulties we provide to the
driver a support system to help the driver in this complex task. CBP was chosen because it allows directly
reuse the human drivers experience as well as from other sources. The main steps of the CBP are distributed
among specialized agents with different roles: Planner and Executor. Our approach was evaluated by different
metrics: (i) accuracy of the case recovery task, (ii) efficiency of task adaptation and application of such cases
in realistic scenarios and (iii) fuel consumption. We show that the inclusion of new experiences reduces the
efforts of both the Planner and the Executor, reduces significantly the fuel consumption and allow the reuse
of the obtained experiences in similar scenarios with low effort.
1 INTRODUCTION
For years, different sectors of the economy have been
tested in relation to their innovation capabilities and
competitiveness, which can be summarized by the ex-
pression doing what we already do well, better. These
capabilities, in general, aim to create new cash flows
for a company. Thus, the use of information tech-
nology is imperative for establishing a different and
sophisticated way to reduce costs without compro-
mising quality, and still consider the scarcity of re-
sources. In this scenario, the railroad, to be compet-
itive, must minimize transportation costs and capital-
ize every available resource, such as railroad cars and
locomotives.
Although the railroad is one of the most feasible
modes for freight transportation, there is still latitude
for cost reduction. The use of any technological re-
source that can reduce expenses, for example, fuel
consumption, can represent significant cost reduction
in one year of operation. For example, the United
States of America railroads consumed 3.600 million
of gallons of fuel in 2012, approximated 145.7 thou-
sand gallons per locomotive, which represent a cost
14.285 mi of dollars (of the Assistant Secretary for
Research and of Transportation (US DOT), 2014).
The establishment of general train driving policies
that derive from important financial returns is diffi-
cult because of: (i) the need (or existence) of special-
ized training for drivers; (ii) variations in train for-
mation (e.g., number of locomotives, railroad cars);
and (iii) influence of driving conditions (i.e., climate,
constraints). Moreover, the train driver must possess
significant knowledge regarding rules and regulations
(e.g., driver cab controls, signaling systems, and track
safety), traction knowledge (e.g., engine layout and
safety systems) and route knowledge, in addition to
several hours of practical driver skills. This set of re-
quirements is necessary in order to achieve a feasible
safe, fast and cost-effective driving of several trains.
In this context, an approach for generating cen-
tralized driving plans that drive with static rules has a
small possibility of producing significant results given
variations in the use conditions of the track and di-
versification of the experiences gained. The approach
proposed here includes the use of a distributed archi-
tecture to increase the availability of resources such
as experiences and comprehensiveness of plans be-
440
P. Borges A., B. Dordal O., Ribeiro R., C. Ávila B. and E. Scalabrin E..
An Economic Approach for Generation of Train Driving Plans using Continuous Case-based Planning.
DOI: 10.5220/0005348504400451
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 440-451
ISBN: 978-989-758-096-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

fore and during execution of such plans. Further-
more, the application of case-based learning allows
those involved to become increasinglyspecialized and
autonomous. To achieve autonomy and specializa-
tion, the existence of some agents specialized in well-
defined tasks is assumed: Memory (maintaining a
case base), Planner (preparingfeasible drivingplans),
and Executor (executing and adjusting plans).
The Planner and Executor agents adapt and exe-
cute plans, respectively, against different driving con-
ditions and strategies. For example, a given strategy
can target specific goals, such as energy efficiency or
driving speed. The construction base of each strat-
egy can be purely mathematical, algorithmic, or rule-
based (e.g., hIF-THENi) (Sato et al., 2012). These
techniques offer few possibilities for adaptation with-
out the intervention of an expert in this field. Such dif-
ficulty represents an important limitation when there
is diversification of the profiles of the railroads and
trains involved.
In this paper,the main motivation is to improve the
performance of Executor agents when facing new sit-
uations, by exchanging experiences between agents,
reducing the necessary efforts to apply a driving plan.
The exchange of experiences occurs when the ex-
ecuted driving plans by human drivers, or another
sources, is incorporated to the knowledge base of
Memory agent and is used by Planner agent to elabo-
rate new driving plans.
The driving plans are elaborated using the Case-
Based Planning approach without human interac-
tion. CBP is based on canonical case-based reasoning
(Aamodt and Plaza, 1994)(Spalzzi, 2001). This ap-
proach is divided in four main steps: recover the past
case solutions that are similar to the new problem,
reuse and adapt (if necessary) the most similar case,
revise the proposed solution to guarantee its applica-
bility and retain the new solution for future use. At
first step, an Euclidian Distance is used by the Mem-
ory agent to calculate the distance between the new
problem and the stored cases. A set of most similar
cases will be adapted using the Genetic Algorithm,
which tries to optimize the new solution. The best
adapted solution is revised according to domain spe-
cific knowledge, to guarantee the safety during the
journey, avoiding situations that damage the train or
the railroad, like slipping, lack of moving force or
high speed. At end, the executed driving plans are
stored by Memory agent when it returns to the sta-
tion.
The approachwas evaluated by the accuracy of the
case recovery task, and the efficiency of task adapta-
tion and application of such cases in several scenarios.
The applicability of the proposed solution is evaluated
in terms of fuel consumption, comparing our best sce-
nario against the fuel consumptions obtained for other
approaches with the same configurations of train and
railroad. We show that the inclusion of new expe-
riences reduced the efforts of both the Planner and
the Executor and reduces significantly the fuel con-
sumption. In addition, the CBR approach allowed the
reuse, with low effort, of the obtained experiences in
similar scenarios.
The next section introduces some related works.
Section 3 presents the developed system. Then, Sec-
tion 4 shows some of the experiment results. Finally,
the last section presents our conclusions.
2 RELATED PAPERS
Many researches have applied Case-based reasoning
within various problem-solving domains. For exam-
ple, like a recommender mechanism (Wang and Yang,
2012) or in autonomic systems to minimize human in-
tervention and to enable a seamless self-adaptive be-
havior in the software systems. (Khan et al., 2011).
Case-based reasoning has been used successfully
in collaborative systems whose missions were to as-
sist people in various tasks, such as selecting the
appropriate behavior for an unattended vehicle ride
(Bajo et al., 2007) (Vacek et al., 2007) , optimizing
industrial processes (Navarro et al., 2012), and estab-
lishing rules used to assist experts in detecting envi-
ronmental changes (Mota et al., 2008). In these sys-
tems, the goal was to share plans as a way of enrich-
ing experiences by generating shared and interactive
plans and execution. In our application, the collabora-
tive driving approach directly considered the experi-
ences of human drivers (adjusting them if necessary),
as well as the experiences of automatic driving sys-
tems. Also, our main difference lies in the indepen-
dent execution of the plan, i.e., during its execution,
there is no interaction with the Planner (which gener-
ated the plan) located in the processing station. The
Executor is embedded in the onboard computer of the
main locomotive,without a dedicated communication
channel with the agents of its origin station. There is
no transmission of driving plans because of environ-
mental restrictions, such as the presence of tunnels,
distance of transmission towers, and increase in the
cost of the operation.
In railroad transportation, several works were de-
veloped over the years in order to optimize driving
and use of the rail network. In (Gu et al., 2012)
the focus was to determine the speeds practiced dur-
ing the trip, using non-linear programming to avoid
abrupt actions from the driver agent. A similar focus
AnEconomicApproachforGenerationofTrainDrivingPlansusingContinuousCase-basedPlanning
441
S
TATION
PA Planner Agent
EA Executor Agent
Dispatcher
PA
<Ei-1, Ei>
EA
<Ei-1, Ei>
Control
Comunication
Case
Base
Memory Agent
PA
<Ei, Ei+1>
EA
<Ei, Ei+1>
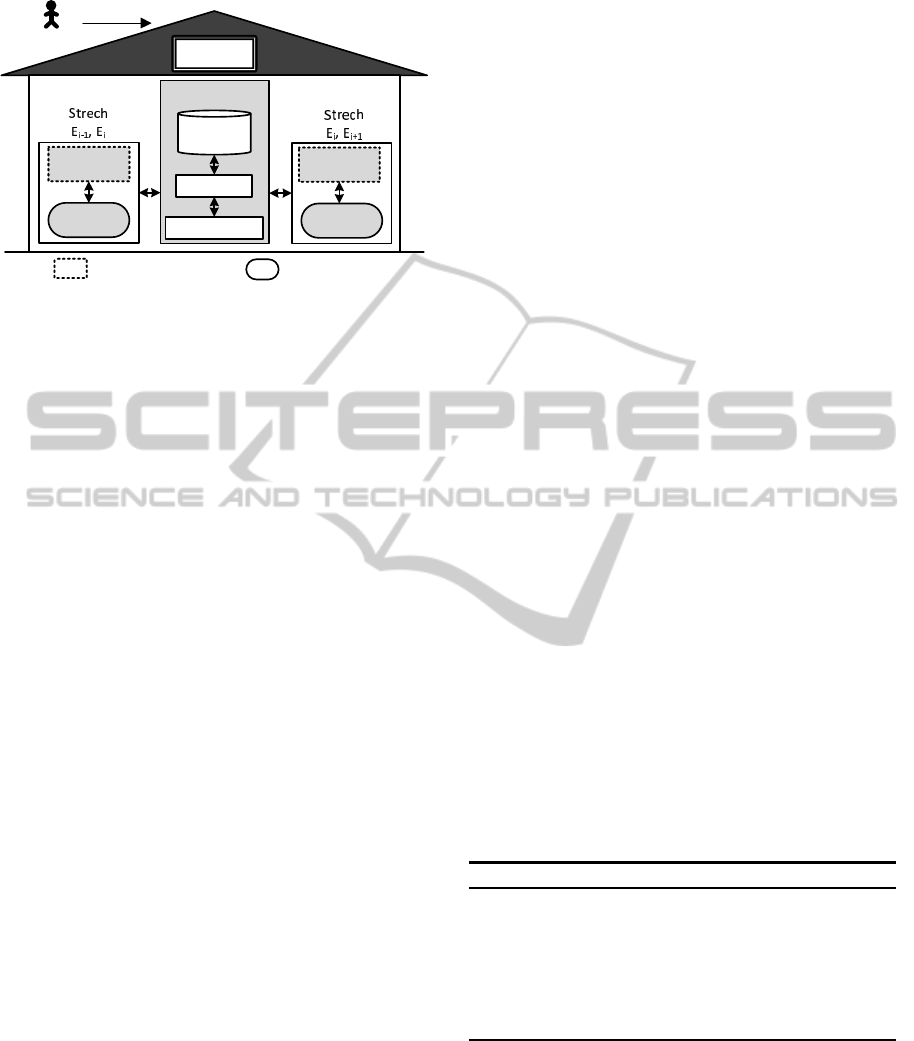
Figure 1: ITDS: Representation of a station, with a Memory
agent, two Planner agents, and two Executor agents.
was given by (Hengyu and Hongze, 2012), but with
the use of fuzzy neural networks to control actions.
In (Fang et al., 2013) the authors present several ap-
proaches developed for re-scheduling problem in rails
networks. In (D. and Houpt, 2011) the authors present
a train control-system to optimize trips that requires
the continuously profile update by GPS (Global Posi-
tioning System) to control the locomotives, however,
due the presence of tunnels the GPS signal may fail
and become unavailable. Finally, in (Borges et al.,
2012) a single agent, based on CBR, was created to
prepare train-driving plans based on the recovery of a
single action at a time. The internal organization of
the case base was proposed in the composition of the
cases and specializations, which required time to be
organized, and resulted in lower percentages of suc-
cess than those presented here. Furthermore, the plan-
ning of a single action at a time made the approach
computationally costly.
3 ARCHITECTURE
The developed system, referred to as the Intelligent
Train Drive System (ITDS) utilizes the following re-
sources: rail network, freight train, and software
agent (Wooldridge and Jennings, 1995). The rail net-
work is viewed as a graph where the vertices repre-
sent physical or logical stations, and the edges have
information from the track (i.e., profile). Each station
hosts a Memory agent, a Planner, and one or more
Executors for each stretch S
i
. This configuration is il-
lustrated in Figure 1, where the triple hE
i−1
,E
i
,E
i+1
i
defines the ends of two stretches S
1
= hE
i−1
,E
i
i and
S
2
= hE
i
,E
i+1
i.
The interaction between the different agents is
well defined in time. Planner PA1 receives, from an
external system, a demand d to drive the train on a
stretch S
i
. PA1 then segments plan P of stretch S
i
into
n parts p
1
,..., p
n
, according to the vertical profile of
the stretch. The cycle starts. For each p
k
, PA1 for-
wards to Memory agent MA1 a request for plans ap-
plicable in p
k
. MA1 collaboratively returns to PA1 a
set of candidate plans SP = sp
1
,...,sp
m
. PA1 reduces
this set SP to a single feasible plan sp
k
, adapting it
to the current situation, and includes sp
k
in plan P.
Then, it selects p
k+1
and repeats this cycle n times.
At the end, P is forwarded to an EA1, which embarks
on the train and applies it.
During the application of P, there is no com-
munication between the agents, a differential aspect
when compared to other approaches (D. and Houpt,
2011)(Gu et al., 2012)(Hengyu and Hongze, 2012).
However, because the conditions for plan execution
may change, it may be necessary to partially redo
parts of plan P. The capacity of the Executor to redo
parts of plan P ensures feasible and safe driving with-
out the need to receive a new plan from PA1. This
is an important aspect for making the use of commu-
nication channels less relevant. Existing train-station
communication is only used for monitoring and con-
trolling the position of each train. This helps to reduce
the costs of freight transport and coupling across sys-
tem software modules.
The algorithm 1 summarizes the ITDS flow. The
input of the algorithm is a base-case B containing past
experiences of human drivers or another fonts. While
a demand is not emitted by a Dispatcher, the system
remain waiting for a demand (lines 1-3). When the
order is received, the Planner elaborates a plan P to
attend the d using the previous experiences stored in
B (line 4). Next, the Executor agent will execute P
(line 5). After the execution of P, the executed plan P
′
is incorporated in the case-base of the Memory Agent
(line 6).
Algorithm 1: Basic ITDS flow.
Require: a case-base B
1: while d = null do
2: d ← listenDispatcher()
3: end while
4: P ← planner(B, d)
5: P
′
← execute(P)
6: B ← store(B,P
′
)
The agents responsible for execute the tasks sum-
marized will be described in the next section.
3.1 Agents
The role of the Dispatcher is to globally manage the
times and orders for the movement of trains in a rail
network, rationally attempting to occupy the spaces
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
442
and existing resources (Company, 1979). The Dis-
patcher decides whether to stipulate the maximum al-
lowable speed at certain points of the track, and to
restrict or allow the passage of the train in a sec-
tor (Company, 1979). This information is sent to
the Planner along with the dispatch order, trigger for
planning.
The Planner generates a driving plan P to meet the
demand of the Dispatcher, which is to move train T
from end E
i
to E
i+1
. Each action of P can take one of
the following behaviors: accelerate, maintain, or re-
duce the speed of train T. Each behaviour is adjusted
according to a specified power. Accelerate and reduce
correspond, respectively, to increase and decrease ac-
celeration points. In a locomotive, each acceleration
point, typically from 1 to 8, generatesa positive power
capable of moving the train. Speed reduction can be
accomplished by generating a power less than the sum
of the resistances or by applying the brakes. Brak-
ing involves applying pressure in the brake pipe, mea-
sured in psi (pressure in pounds per square inch) and
is represented here by acceleration point -1. To move
the train, an appropriate acceleration point for a given
position of the railroad stretch to be covered must be
planned in order to avoid sliding and overcome the
sum of resistances (Loumiet et al., 2005).
To ensure train movementin all points of the track,
it is also necessary to know the minimum required
power. This power is calculated by the Dispatcher and
reported to the Planner in the dispatch order. The cal-
culation considers the minimum tractive force of all
the locomotives intended to move a train against the
high resistance of the stretch to be covered. Moreover,
the resulting set of actions should meet the objectives,
which are in opposition in the first two at the base, of
performing a quick trip, reducing fuel consumption,
and complying with the security restrictions. Thus,
one should plan speeds near the cruise speed, for ex-
ample, 5 km/h below the maximum speed. Within this
criterion, actions should reduce fuel consumption and
travel time. The resulting set is the driving plan P for
train T in a stretch S.
The role of the Executor is to apply plan P, re-
ceived at end E
i
, performingthe following basic tasks:
testing the applicability of ak based on the current
train conditions, adjusting the parameters of a
k
(if
necessary), and applying a
k
. Until the complete ex-
ecution of P, P may undergo several ∆ adjustments.
For example, in the case of non-applicability of an
action a
k
, the Executor may adjust ak based on driv-
ing skills. Adverse conditions may represent, for ex-
ample, a climate change (changes the friction coeffi-
cient), changes in the maximum allowable speed, and
others. Such conditions perceived by various sensors
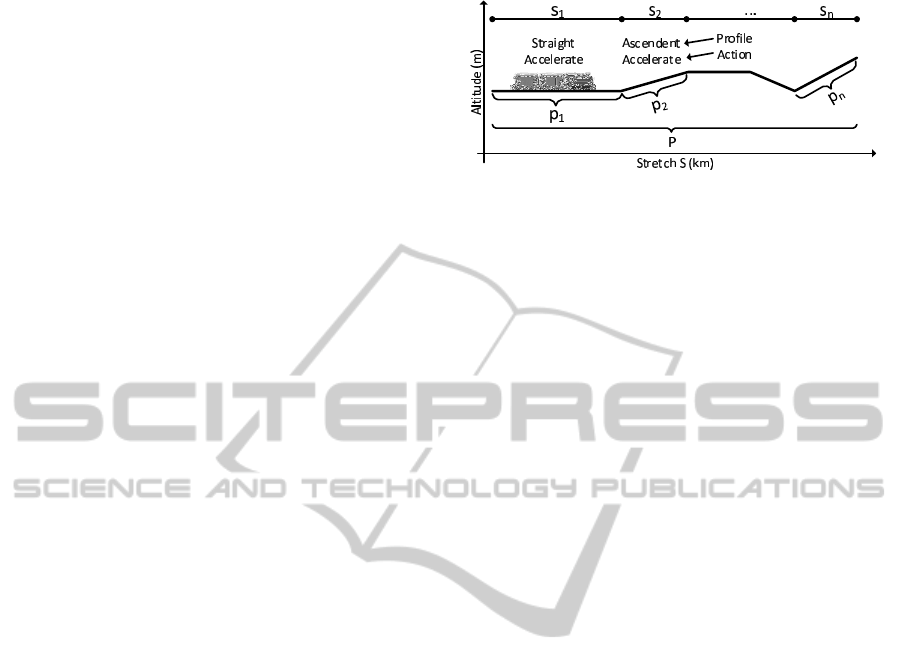
Figure 2: Example of segmentation of a stretch S into parts
s
1
,...,s
n
according to the vertical profile and a set of cases
p
1
, p
2
,..., p
n
, which when ordered form a plan P for the
movement of trains.
are read in predetermined time intervals.
The Memory agent has two basic functions: (i)
providing the Planner with a set of plans applicable
to each part of a given stretch and (ii) maintaining a
base of plans in a dynamic memory structure (Schank,
1983). Each Memory, located in a station, maintains
only the plans applied in the stretches from ends E
i
to E
i+1
and from E
i
to E
i−1
. Maintaining only the
plans of the stretches connected to the station allows
specialization in these stretches. Each plan executed
P+ ∆ is returned to the Memory of the origin end
point to be integrated into the local base of the sta-
tion plans. Such structure allows the inclusion of a
new plan that can activate simple internal processes
of plan reclassification and/or more sophisticated op-
timization of data structures and indexing of plan con-
tents (Schank, 1983).
3.2 The Plan Elaboration
The elaboration of a plan requires: information from
the train (i.e., position, number of locomotives and
railroad cars, and weight) and from the track stretch
(i.e., maximum speeds, friction coefficients, and ver-
tical profile). The vertical profile is critical for defin-
ing the relevant portions of a stretch S = s
1
,...,s
n
(see
Figure 2).
For each part s
i
, a plan is prepared that corre-
sponds to a new problem to be solved. Each part
must become specialized. Figure 2 illustrates plan
P with p
1
,..., p
n
. Each p
i
describes a set of actions
with more predictable behaviours (maintain, acceler-
ate, and reduce) for a vertical profile (rising, falling,
and plain/plateau).
The behaviours that must be undertaken for proper
driving are shown in Figure 3. Such behaviours will
vary depending on current speed s, initial speed s
i
,
cruise speed s
c
, and maximum speed s
s
(Pinto et al.,
1985). Proper driving is obtained when the current
speed is greater than the initial speed and less than
the maximum speed, remaining close to the cruis-
AnEconomicApproachforGenerationofTrainDrivingPlansusingContinuousCase-basedPlanning
443
I
2
II
III
1
V
III
2
IV
S
s
S
c
S
i
S
critical
I
1
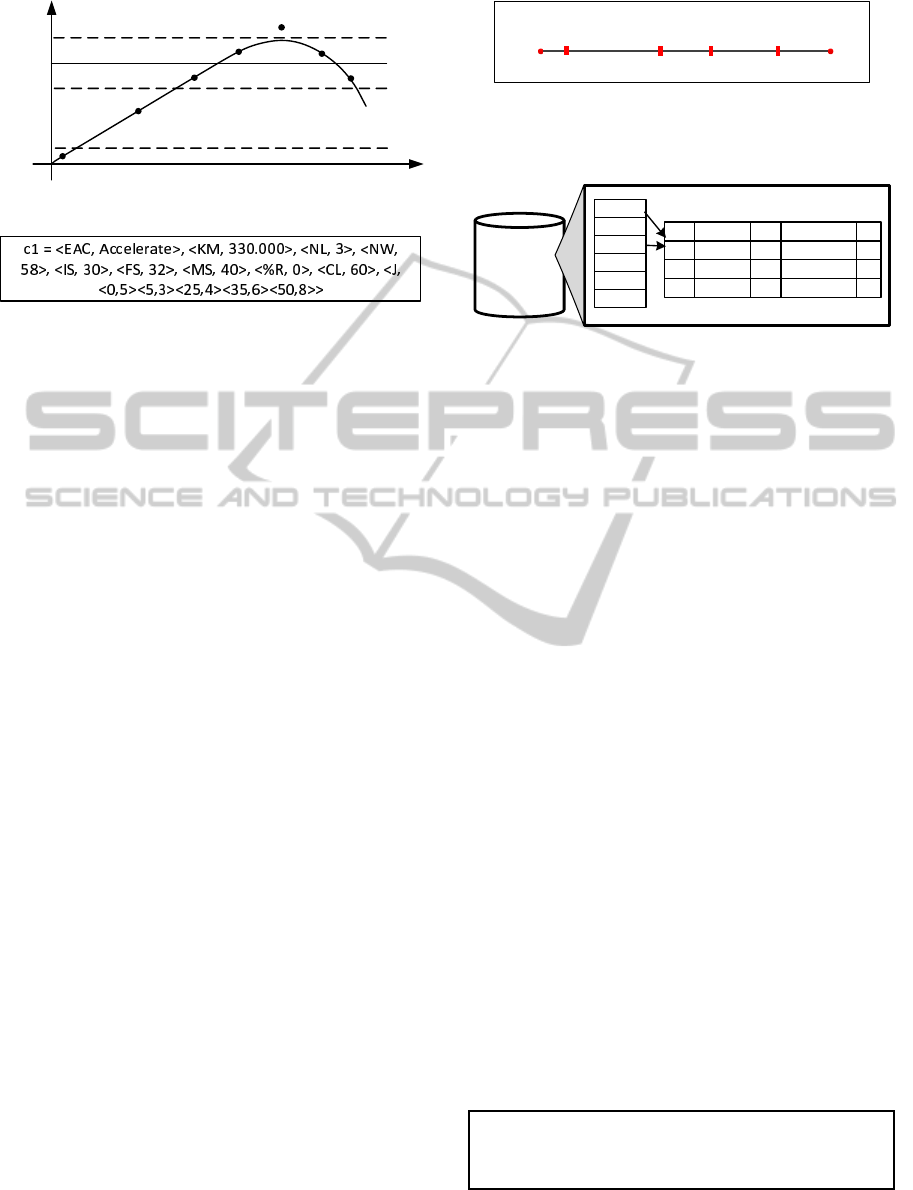
Figure 3: Possible states of train driving (Pinto et al., 1985).
Figure 4: Example of a retrieved case.
ing speed. States indicate actions that must be per-
formed to achieve proper driving. State I suggests
ACCELERATING the train because the current speed
is less than the initial speed. States II and III
1
suggest
ACCELERATE or MAINTAIN speed. On the other
hand, state III
2
must REDUCE the speed because of
the proximity to the current speed with the maximum
speed. In state IV, it must ACCELERATE to approx-
imate the current speed to the speed regimen. The
BRAKING action is recommended in stateV because
the train can exceed the maximum allowable speed.
Pragmatically, case C is a representation of a real-
world object or episode in a particular representation
scheme (Kolodner, 1993). A case represents a finite
set of n attribute/value pairs that is a snapshot of the
situation executed by a train conductor during one
trip.
Figure 4 shows an example of a case recovered
in the form of pairs hattribute,valuei formed by the
following attributes: action performed (EAC), initial
kilometre (KM), number of locomotives (NL), num-
ber of railroad cars (NW), initial speed (IS) in km/h,
final speed (FS) in km/h, maximum speed (MS) in
km/h, ramp percentage (%R), and total displacement
(CL) in meters. Although such attributes are pre-
sented as an illustration, they represent the dominant
features in the movement of a train.
A case also has a solution formed by a set
J = hm
1
,AP
1
i,hm
2
,AP
2
i,,hm
j
,AP
j
i
of ordered pairs. Each pair contains an acceleration
point (AP) and an application position (M) defined in
meters. Figure 5 shows an instance of P, and an appli-
cation of each AP, from left to right, must move from
0 km to 60 km. The determination of each element of
P should allow the Executor to move the train safely
and efficiently.
It is expected that, as the Memory agent has in its
case base, a number of cases applied in stretches leav-
km x km x+60
0
5 3
5
4
25
6
35
8
50
AP
M
8
60
Figure 5: Example of the solution of an applicable case in
kilometre (km) x to the maximum kilometre x+ 60.
Agent
Memory
Case Base
<PA1, EA1>
<PA1, EA2>
<PA2, EA1>
<PA2, EA2>
...
Case 1
Case 1
Case 3
Case 8
Case 5
...
Plan <PA1, EA2>
Case 1
Profile
Straight
Straight
Straight
M
0
5
25
AP
5
3
4
Action
Accelerate
Accelerate
Accelerate
...
...
...
...
Figure 6: Representation of the local Memory (left) case
base and example of part of a stored plan (right).
ing the station where it resides, there are greater pos-
sibilities of recovering an applicable case. If the case
is not fully applicable, it is believed that the adap-
tations are in reduced percentages. Figure 6 shows
the cases organized according to the actions taken (AP
and Action) and the constituents of the track profile.
This organization allows recovery of cases more simi-
lar to the stretch of the track in question and the action
to be applied.
3.3 Inter and Intra Agents Data Flow
Figure 7 shows the basic flow of inter and intra agent
collaboration. In this figure, the Dispatcher has been
omitted. Thus, the flow is started by the Planner,
whose first activity is to receive the dispatch order
generated by the Dispatcher and to generate a new
problem. As a result, two collaboration cycles are
established: the first interactively involves the Plan-
ner agent and the Memory agent, and the second se-
quentially involves the Planner, Executor, and Mem-
ory. Henceforth, PA1 is used to designate a Planner
agent, EA1 an Executor agent, and MA1 a Memory
agent.
3.3.1 Planning Flow - Planner and Memory
Interaction
Planning starts when PA1 receives a dispatch order
from the Dispatcher.
(inform :sender Dispatcher :receiver PA1
:content (locomotives=3, wagons=58, [...]))
Then, the perception of the environment is per-
formed, resulting in a new case c1 to traverse stretch
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
444

Executor Agent (EA)Planner Agent (PA)Memory Agent (MA)
Revise
Recieve a dispatch
order
Retrieve
Request similar case
[retrieved]
C : Set<Case>
Reuse
[suggested]
c2 : Case
[valid?]
Retain in plan
[yes]
[no]
Recieve the plan
Retrieve action
Revise action
[yes]
Reuse action
[no]
Apply action
[end of trip?]
[no]
Finalize trip
[yes]
Send
Plan
[end of plan?]
Percept
[no]
Send plan
[yes]
[valid?]
[executed]
P : Plan
Read recieved
case
[new]
c1 : Case
Send set of
cases
[executing]
P : Plan
[planned]
ai : Action
Percept Environment
[new]
: Problem
Update
Base
<<asynchronous>>
[full]
P : Plan
[sent]
P : Plan
[new]
c1 : Case
[sent]
C : Set<Case>
[reproved]
c2 : Case
[approved]
c2 : Case
Figure 7: Basic ITDS flow.
S
i
. The instantiation of c1 is managed by a dedicated
module that performs two basic functions: (i) read
sensors for speed, position, traction, and others, of the
train; (ii) calculate, in this case, the values for resis-
tance, effective tractive force of the pulling locomo-
tives, acceleration force, adherent tractive force, etc.
The data set (perceived and derivatives) defines the
values used to move the train (Loumiet et al., 2005).
PA1 passes on the new case instantiated by means
of a request to MA1.
(request :sender PA1 :receiver MA1 :content
(hattributes of the problemi))
Internally, the message is received and managed
by the Memory. The recovery of similar cases is done
using the Euclidian distance. The advantage of this
division of labor is to allow PA1 to perform another
task during the recovery phase, for example, to pro-
cess another dispatch order.The recovered cases are
then sent to PA1.
(inform :sender MA1 :receiver PA1 :content
(hset of similar casesi))
The most similar case c
i
is selected and adapted
according to the current perception (if necessary) by
the Reuse activity. This task involves replacing the
values of the J pairs (e.g., Figure 5), which are, re-
spectively, happlication position, acceleration pointi.
The adaptation step of the Planner used a genetic al-
gorithm (Baeck et al., 2000) (Mitra and Basak, 2005).
In a genetic algorithm the case base form the ini-
tial population of genotypes. Firstly, the algorithm
retrieves partial matching cases from case base with
specified design requirements. In this paper, each in-
dividual is composed by the recovered case solution J
and the initial population consist of the 50 most simi-
lar cases recovered from the Memory.
Next the retrieved cases are mapped into a geno-
type representation, so, the solution J of the each re-
covered case is mapped into a genotype of an individ-
ual, using integer numbers. For example, the individ-
ual of Figure 5 is mapped as
Individual Number: i0|
Evaluated: T
Fitness: f1138065562|427.0047|
i0|i5|i5|i3|i25|i4|i35|i6|i50|i8|i60|i8
to obey the standard used by the ECJ framework.
Later crossover and mutation operators are ap-
plied. The mutation and crossover rates are 50% for
both. We used one-point crossover since this tech-
nique have been good results when compared with
others (Magalh˜aes Mendes, 2013). Finally, newly
generated genotypes are mapped into corresponding
phenotypes/cases by inferring values for the attributes
and adding the context of the new design.
Applying the genetic algorithm to case adaptation
also requires the identification of a fitness function.
In this paper, two of the main objectives are to reduce
the fuel consumption and optimizing the speed prac-
tised by Executor agents. So, the fitness function g(x),
illustrated in Equation 1, was defined to minimize
such objectives, although they are opposites. These
attributes have a great impact on the generation of in-
dividuals and will determine their utility in the pop-
ulation. Each attribute has a factor which represents
his weight in the problem: fuel consumption ( flgtt)
and speed (fv), where flgtt = 0.02 e f v = 0.01. The
valuesof fuel consumption (lgtt) and speed (v) are ob-
tained by simulating the application of the individual
in the problem. During the simulation, the following
values are calculated for each action: consumption,
travel time, resistance, force to drive the train, and
others. Therefore, the fitness function considers cal-
culations that result in the forces required to move the
train considered (Borges et al., 2012).
AnEconomicApproachforGenerationofTrainDrivingPlansusingContinuousCase-basedPlanning
445

Min.g(x) =
J
∑
j=0
(( flgtt × lgtt
j
) + ( fv× v
j
)) (1)
The values of f lgtt and fv were calculated by a
genetic algorithm made specific for it, where the indi-
viduals are composed by pairs of < flgtt, f v >. Each
parameter can vary according the interval [0.01;1.00],
totalling 100 possible values for each factor, being
this the value of each population generated by the
algorithm. For each individual a journey was simu-
lated, all with the same train and railroad configura-
tions. The fuel consumption obtained in each journey
was used as fitness function value. The crossover and
mutation techniques used the same configuration de-
veloped for this paper. The stopping criteria was set
to 100 generations, because there is a 10000 possible
factor combinations.
Returning to the adaptation step of this paper, the
crossover and mutation operations creates individu-
als that consists of solutions for the actual problem,
called proposed solutions. Each solution generated
by the genetic algorithm J is composed by accelera-
tion points and places of its applications, according to
Figure 5. Each proposed solution J is simulated, ap-
plying the acceleration points at the positions speci-
fied in J. The resulting fuel consumption corresponds
to the fitness of the individual. If the proposed solu-
tion is not applicable, because it results in slipping or
lack of movement force, the individual is penalized
with a high value for the fitness and this individual is
discarded. The stopping criterion of the strategy was
the number of generations, equal to 10. At end, the
individual with minor value of fitness will be chosen
for the adapted case. The fitness function maximizes
some value by default, so, to minimize the fuel con-
sumption we convert the fitness function to 1/g(x).
The adapted case c
′
i (corresponds to case c2 in
Figure 8) is feasible if and only if all parts of J meet
the following situations: (i) does not result in sliding,
(ii) have sufficient force to move the train, and (iii) if
the acceleration point can be reduced and continue to
move the train, which indicates unnecessary fuel con-
sumption of the action. If the case is not approved,the
values of J are again submitted to the Reuse step, and
this is repeated until a valid solution is found and the
case is approved. A valid solution must comply with
the criteria (i) and (ii) described in the previous para-
graph, but not necessarily with criterion (iii), added
only to reduce fuel consumption.
After adding the valid adapted case in P, PA1 ver-
ifies whether the application of the plan results in the
arrival at the destination. If not, the planning cycle is
repeated for the next part of stretch s
i
. If so, P is sent
to EA1.
Figure 8: Adapted Case.
(execute :sender PA1 :receiver EA1 :content (the
plan P))
EA1 is embedded in the onboard computer of the
main locomotive and begins to command it. If later,
another train passes through the same station, another
Executor EA2 is created with a specific plan for the
new train.
3.3.2 Flow of Execution of the Plan - Executor
The plan execution cycle is similar to the planning
cycle. Each Executor starts its activities upon receiv-
ing the trip plan P. In possession of P, EA1 starts
the trip. During the trip, EA1 Recovers an action
a
k
of P and evaluates its preconditions. For such, it
perceives the environment through data read from the
onboard computer of the lead locomotive (e.g., max-
imum speed, friction coefficient, and others). If no
precondition is violated at the time of reading, the a
k
action is applied, resulting in new information (i.e.,
speed, position, and others), which becomes the pre-
condition for the next action a
k+1
. On the other hand,
if one or more preconditions are invalid, for example,
because of some unforeseen event (e.g., rain, fog, or
changing the speed limit), EA1 corrects the action of
the plan based on its knowledge of driving (Reuse).
Such adjustment is made by evaluating the reason for
the failure, which can be: sliding, lack of force to
move, or stopping unexpectedly. It is expected for
each change (when required) to cause as insignificant
an impact as possible, i.e., the shortest distance be-
tween the planned and the applied acceleration point,
thus resulting in a reduced state space search.
Once the task of EA1 driving the train from end
E
i
to end E
i+1
is complete, the Finalize trip activity
is executed. In it, plan P and its ∆ adjustments are
processed, resulting in a plan P. P is returned to the
origin station E
i
by an Executor whose destination is
E
i
.
(inform :sender EA1 : receiver MA1 :content(an
executed plan P + ∆
The transport of the modified plan to the origin by
means of another train is assumed because, during the
trip, no communication channel is used to transmit the
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
446
plans between the train and the station. If the stretch
has only one direction, the plan is stored at the station
and forwarded to the next station that has a connec-
tion with the plan origin station. Communication be-
tween train and origin station is limited to sending in-
formation related to the conditions of the railroad and
the position of the train because of the cost of data
transmission and limitations of the means of commu-
nication, most of the time, against geographical con-
ditions.
3.3.3 Update Case Base - Memory
Memory agent MA1, upon receiving plan P, does the
following: for each profile p
i
of P, identify the action
taken (accelerate, maintain, or reduce) based on the
speed variation practiced. Each separate and identi-
fied part of the plan is compared with other existing
cases in the base. If it is already present, its reputation
receives a backup. Otherwise, a new event is inserted.
The reputation is a piece of information that allows
management of the case base (if necessary, thus re-
ducing the number of cases).
4 EXPERIMENTS
The approach was evaluated by different metrics: (i)
fuel consumption (LGTT), (ii) accuracy of the case
recovery task, and (iii) efficiency of task adaptation
and application of such cases in synthetic scenarios
which were created inspired in real-world scenarions.
The last two indicate the efficiency of the collabora-
tion of the Memory and Planner agents.
The experiments were conducted in a simulated
driving environment, and field equations (Loumiet
et al., 2005) were implemented in Java (Luke et al.,
2014) and validated using several experiments. The
profiles of the railroads, trains, and the initial case
base are derived from real situations.
Table 1 defines the configurations of the trains
used in the experiments. To complete the experi-
ments, two different stretches of real railroads were
included: S
1
and S
2
, both with the same length (ap-
proximately 64 km), but with different profilesvertical
and horizontaland maximum speed restrictions.
To evaluate the learning curve of each agent and
the performance of the collaboration in terms of shar-
ing and reusing plans, four scenarios were defined
(see Table 2).
The initial case base of the Memory agent, in all
tested scenarios, contains actual trip plans and trips
executed in simulators (Sato et al., 2012).
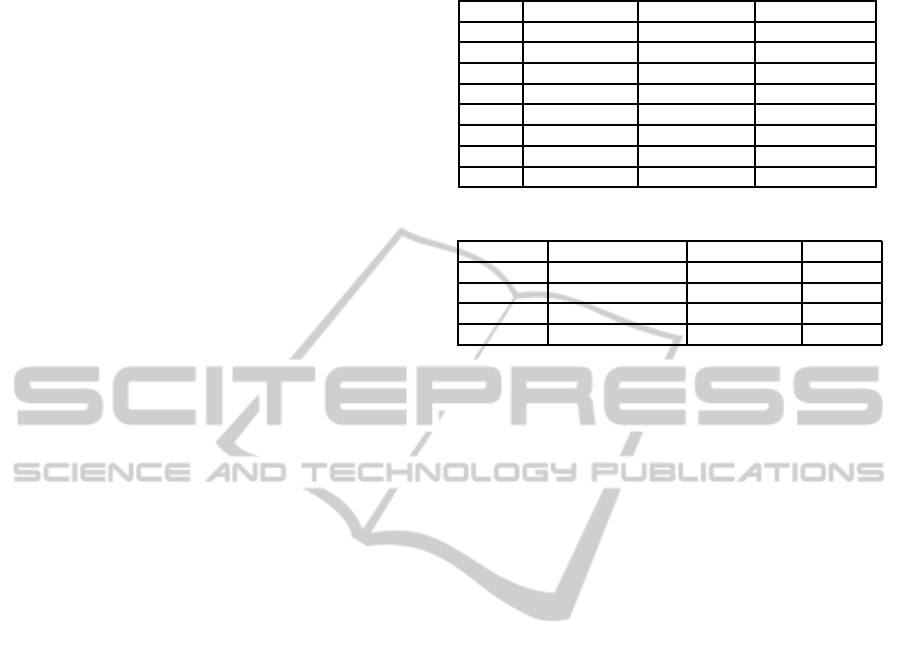
Table 1: Train configuration used in the experiments.
Train Locomotives Railway cars Weight (tons)
1 3 58 6278
2 4 100 6342
3 4 58 6541
4 2 31 3426
5 3 47 5199
6 2 31 3441
7 4 59 6579
8 2 28 3118
Table 2: Simulated scenarios in the experiments.
Scenario Train (Table 1) Reuse plans Stretch
A 1 No S
1
B 1 Yes S
1
C 1 Yes S
2
D [1;8] Yes S
1
The scenarios are evaluated according to the ef-
ficiency (%) of the recovery and adaptation steps of
the cases. This percentage indicates the success of re-
covery or adaptation of a case. For example, at any
given time, the Memory agent recovers, for the Plan-
ner agent, a case with a set of actions A = {3,4,4, 4}.
This set is adapted by the Planner, resulting in A =
{4,4,4,4}. Thus, the recovery task has an accuracy
of 75%. Then, A is passed to the Executor agent and
applied without any changes, resulting in a 100% fit-
ting accuracy. Soon, the adaptation effort is 25% and
the execution effort, in terms of adaptation, is null.
In scenario A, the Memory agent uses only the ini-
tial case base. Ten trips were planned and all of them
for train 1 in stretch S
1
. All plans were executed by
an Executor agent. At the end of each trip, the new
experiences (new plans) were not incorporated to the
case base of the Memory agent. Figure 9 presents the
efficiency (%) of the recovery and adaptation steps of
all the cases in the ten trips. It is observed that the
recovery of cases is less effective than the adaptation
of cases. In percentage, the difference between the
recovery and adaptation task corresponds to the con-
tribution of the adaptation task to make the plan appli-
cable to a given case. The average of this difference
is 8%, with a standard deviation of 1%. Compared
to a method of satisfaction of constraints, the effort
obtained is less in terms of memory used, execution
time, and number of states. Regardless of the highest
peaks of success of the recovery and adaptation task
being 46% and 51%, respectively, the generated and
executed plans are similar at 86%. The similarity is
calculated by the Cosine distance.
In scenario B, the same train configuration and
the same stretch from scenario A was used. How-
ever, at every trip made by the Executor agent, the
applied plan was incorporated to the case base of the
AnEconomicApproachforGenerationofTrainDrivingPlansusingContinuousCase-basedPlanning
447
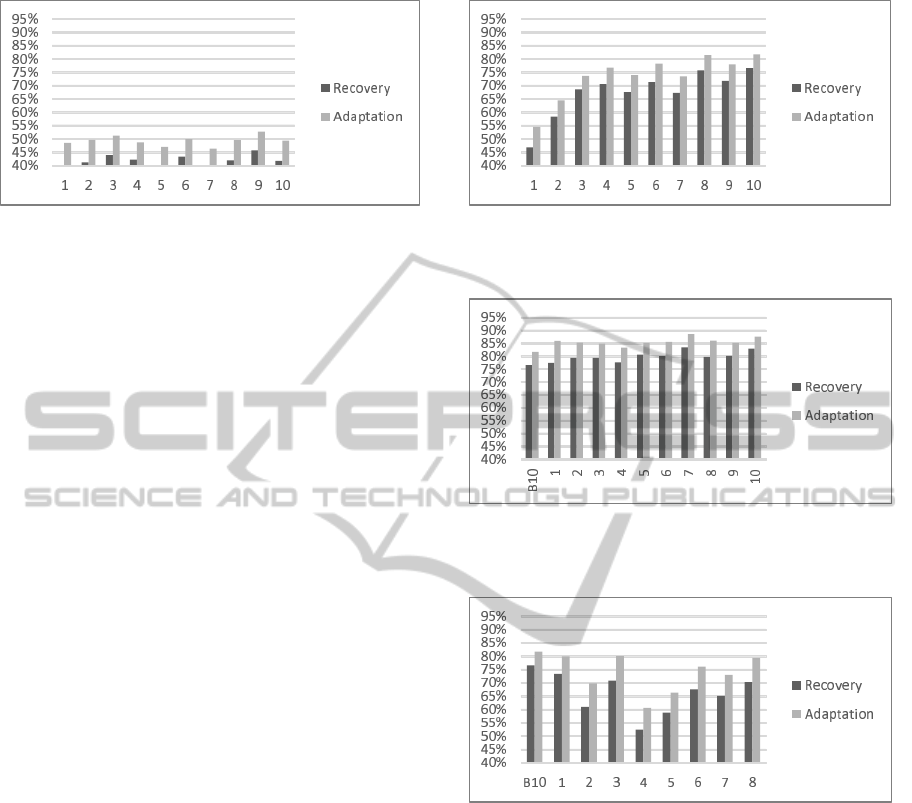
Figure 9: Results of scenario A. Ten trips with the same
train configuration (configuration 1), in stretch S
1
and with-
out reusing plans.
Memory agent. Figure 10 shows that the inclusion
of new plans in the case base of the Memory agent
increased by approximately 25% the efficiency of the
recovery and adaptation tasks. The similarity between
what was planned and what was executed is on aver-
age 90%. The addition of new cases to the experience
base broadens the efficiency of the planning task. It
is observed that between trips 1 and 3, there is an
increasing linear trend of 20%. Moreover, from trip
3, there is a slightly increasing stability, with average
variation of 4% for both tasks, and with standard de-
viation of 2%. The variation is justified because the
trips followed speeds similar to each other, but with
differences in driving plans at certain times. This dif-
ference occurs because of adaptations made by the
genetic algorithm, which in some places suggested
different acceleration points. This results in variation
in the power used, and consequently, variation of the
practiced speeds. This fact is inherent to the natural
behavior of the genetic approach (e.g., mutation).
In scenario C, as in scenario B, on each new trip
made by the Executor agent, the applied plans are in-
corporated into the experience base of the Memory
agent, and thus reused by the Planner agent. The
case base of the Memory agent began with the experi-
ences generated in scenario B. The steps for recovery
and adaptation have an average efficiency of 80% and
86%, respectively (see Figure 11).
In percentage, the difference between the recov-
ery and adaptation task was 9% at the beginning of
the experiment, and then immediately fell to an av-
erage of 5%, with a standard deviation of 1%. De-
spite increased effort because of unfamiliarity with
the environment, the results are significant. These re-
sults encourage the use of a collaborative approach
between agents, located at different stations, to ex-
change plans.
Figure 12 shows the results of scenario D, where
the trips always occur in the same track, but with eight
different train formations. In this scenario, the Mem-
ory agent initiates the experiences of scenario B. In
Figure 10: Results of scenario B. Ten trips with the same
train configuration (configuration 1), in stretch S
1
and
reusing implemented plans.
Figure 11: Results of scenario C. Same train configura-
tion (configuration 1) and initial plans of scenario B, but
in stretch S
2
.
Figure 12: Results of scenario D. Different train configu-
rations (configurations 1 to 8), initial plans of scenario B,
stretch S
1
.
terms of efficiency of recovery and adaptation tasks,
the adaptation task proves superior. There is an ex-
pected drop in success because the train configura-
tions are different for each trip. However, even in this
scenario without repetition of train configuration, it is
possible to note that, to the extent that new cases are
included in the base, the overall efficiency improves.
Hopefully, with a greater number of trips with similar
configurations, efficiency rates move rapidly towards
scenario B.
In the scenarios on which we worked, it can be ob-
served that without reusing plans as past solutions, the
average success rates in the recovery and adaptation
tasks remain low, 42% and 49%, respectively. How-
ever, when we start to reuse the plans as past solu-
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
448
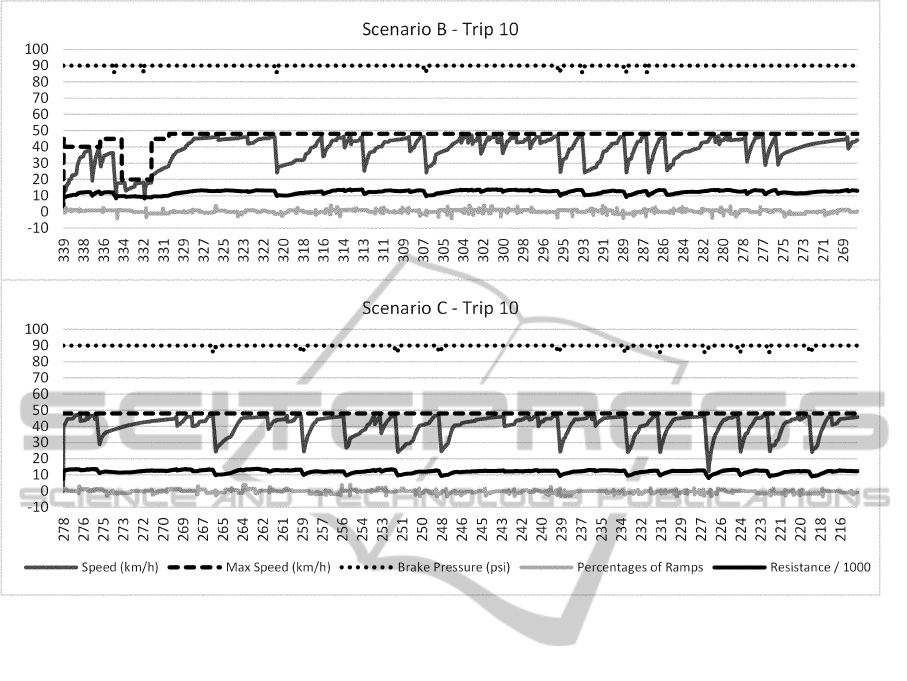
Figure 13: Data of trips made for the same train configuration in different stretches.
tions, the average success rates of recovery and adap-
tation tasks increase to 64% and 74%, respectively.
In terms of complexity, raising the efficiency of such
tasks reduces the effort of searching for the problem
solution. Finally, the contribution of the adaptation
task, in the reuse of shared experiences of different
stretches, remained at the same level of scenario B.
This suggests that the accumulation of cases in a given
scenario proves to be useful in another scenario.
Figure 13 shows graphically the execution of the
ten trips for scenarios B and C. It can be noted that
there is a significant difference for each profile. Such
differences can be observed in the maximum speeds
practiced, percentages of ramps, and resistances. The
evolution of the speeds shows a significant difference
in driving style. The decrease in speeds is related to
the applications of the brakes, and to reflections of
the driving policy that attempts to maintain the speed
of the train near the maximum allowable speed. Such
heuristics are applied to attempt to reduce the duration
of a trip. It should be indicated that the first appli-
cation of the brake follows a default value and must
heavily influence train speed. A smoother speed re-
duction without exceeding the safe speed limit is de-
sired. Such a study is not part of this paper, but it can
be incorporated into the Planner agent, thus giving it
a look ahead mechanism.
In general, in all observed situations, the effort on
adaptation is present, but efficient, and rises over time.
For the field in question, as the trains and the environ-
ment change, the plans used in past situations are not
easily applicable to others; this effectively requires an
adaptive and efficient approach. This finding goes to
the direction of what has classically been understood
as an advantage of the CBR approach in view of a
rule-based approach (Kolodner, 1993). The latter ap-
proach requires explicit knowledge models regarding
the application domain. This demand is difficult to
execute in a complex environment. It also fails when
there is no rule that can be applied in the field. Fur-
thermore, if the environment changes, there is a need
to update the rule base to be able to derive a solution.
As in CBR, knowledge of the field is represented in
the form of cases. It exempts an explicit representa-
tion of the application domain. This allows dynami-
cally maintaining and learning new knowledge as new
cases are incorporated into the case base.
Table 3 is a comparison table that contrasts the
performance of human drivers (Actual column) driv-
ing a simulator where the actions applied are deter-
mined by a constraint satisfaction system (DCOP col-
umn) (Sato et al., 2012) and by the approach pre-
AnEconomicApproachforGenerationofTrainDrivingPlansusingContinuousCase-basedPlanning
449

Table 3: Consumptions obtained in scenario C.
Train
Consumption (LGTT) Reduction
Actual DCOP Our C-A C-B
(A) (B) (C) (%) (%)
1 6.19 4.16 3.36 50% 26%
2 5.68 4.18 4.22 30% -5%
3 6.23 4.09 3.95 41% 10%
4 6.49 4.51 3.88 46% 23%
5 6.29 4.22 3.31 49% 24%
6 6.17 3.99 3.69 40% 8%
7 6.26 4.07 3.86 42% 11%
8 5.68 4.41 4.00 34% 6%
sented (Our column). The DCOP column represents
the best values obtained in this approach. It is em-
phasized that for all consumption values (measured
in LGTT), our approach is higher than for the other
competitors, except on a single opportunity (train 2),
where the DCOP is higher by 5%.
The feasibility of an automatic train driving sys-
tem seems significantly important. For example, for
a fuel consumption expenditure of approximately 250
million dollars per year, any cost savings above 6%
can have a significant impact on the competitiveness
of the freight transport sector.
5 CONCLUSIONS
This paper presented a collaborative approach for
sharing experiences in generating plans for driving
trains. The results obtained showed that the adopted
approach can be generalized and deployed at various
stations of a rail network. We showed that the effi-
ciency of recovery and adaptation tasks increases as
new cases are obtained. Such efficiency generates a
tendency to reduce efforts in planning and re-planning
driving plans. Obviously, if conditions change signif-
icantly, planning efforts increase, at least initially.
Finally, in terms of domain application, two re-
sults are important: in monetary terms, the gener-
ated driving plans can produce significant gains; and
in terms of reuse of experiences, the approach sug-
gested that good drivers should be used to drive trains
in several different stretches of a railroad, for a certain
time, in order to generate experiences. Such experi-
ments can then be used to generate good plans for less
experienced drivers. This helps rationalize the exper-
tise capable for driving trains efficiently. Future work
should follow the following directions: avoiding un-
necessary stops (Dordal et al., 2011), and ensuring the
certification of the information exchanged.
REFERENCES
Aamodt, A. and Plaza, E. (1994). Case-based reasoning:
Foundational issues, methodological variations, and
system approaches. AI Commun., 7(1):39–59.
Baeck, T., Fogel, D., and Michalewicz, Z. (2000). Evolu-
tionary Computation 1: Basic Algorithms and Opera-
tors. Basic algorithms and operators. Taylor & Fran-
cis.
Bajo, J., Corchado, J., and Rodr´ıguez, S. (2007). Intelli-
gent guidance and suggestions using case-based plan-
ning. In Weber, R. and Richter, M., editors, Case-
Based Reasoning Research and Development, volume
4626 of Lecture Notes in Computer Science, pages
389–403. Springer Berlin Heidelberg.
Borges, A., Dordal, O., Sato, D., Avila, B., Enembreck,
F., and Scalabrin, E. (2012). An intelligent system
for driving trains using case-based reasoning. In Sys-
tems, Man, and Cybernetics (SMC), 2012 IEEE Inter-
national Conference on, pages 1694–1699.
Company, G. R. S. (1979). Elements of railway signaling.
General Railway Signal.
D., E. and Houpt, P. (2011). Trip optimizer for railroads.
Technical report, IEEE Control Systems Society.
Dordal, O., Borges, A., Ribeiro, R., Enembreck, F., Scal-
abrin, E., and Avila, B. (2011). Strong reduction in
fuel consumption driving trains in bi-directional sin-
gle line using crossing loops. In Systems, Man, and
Cybernetics (SMC), 2011 IEEE International Confer-
ence on, pages 1597–1602.
Fang, W., Sun, J., Wu, X., and Yao, X. (2013). Re-
scheduling in railway networks. In Computational In-
telligence (UKCI), 2013 13th UK Workshop on, pages
342–352.
Gu, Q., Cao, F., and Tang, T. (2012). Energy efficient
driving strategy for trains in mrt systems. In Intelli-
gent Transportation Systems (ITSC), 2012 15th Inter-
national IEEE Conference on, pages 427–432.
Hengyu, L. and Hongze, X. (2012). An integrated intel-
ligent control algorithm for high-speed train ato sys-
tems based on running conditions. In Digital Man-
ufacturing and Automation (ICDMA), 2012 Third In-
ternational Conference on, pages 202–205.
Khan, M. J., Awais, M. M., Shamail, S., and Awan,
I. (2011). An empirical study of modeling self-
management capabilities in autonomic systems using
case-based reasoning. Simulation Modelling Practice
and Theory, 19(10):2256 – 2275.
Kolodner, J. (1993). Case-based Reasoning. Morgan Kauf-
mann Publishers Inc., San Francisco, CA, USA.
Loumiet, J., Jungbauer, W., and Abrams, B. (2005). Train
Accident Reconstruction and FELA and Railroad Lit-
igation. Lawyers & Judges Publishing Company.
Luke, S., Panait, L., Balan, G., and Et (2014). Ecj 21: A
java-based evolutionary computation research system.
Magalh˜aes Mendes, J. (2013). A comparative study of
crossover operators for genetic algorithms to solve the
job shop scheduling problem. WSEAS Transactions
on Computers, 12(4):164–173.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
450

Mitra, R. and Basak, J. (2005). Methods of case adapta-
tion: A survey: Research articles. Int. J. Intell. Syst.,
20(6):627–645.
Mota, J. S., Cˆamara, G., Fonseca, L. M. G., Escada, M.
I. S., and Bittencourt, O. O. (2008). Applying case-
based reasoning in the evolution of deforestation pat-
terns in the brazilian amazonia. In Proceedings of the
2008 ACM Symposium on Applied Computing, SAC
’08, pages 1683–1687, New York, NY, USA. ACM.
Navarro, M., De Paz, J. F., Juli´an, V., Rodr´ıguez, S.,
Bajo, J., and Corchado, J. M. (2012). Temporal
bounded reasoning in a dynamic case based planning
agent for industrial environments. Expert Syst. Appl.,
39(9):7887–7894.
of the Assistant Secretary for Research, O. and of Trans-
portation (US DOT), T. O.-R. . U. D. (2014). Table
4-17: Class i rail freight fuel consumption and travel.
Eletronic.
Pinto, B., Scheneebeli, H., Borba, J., Amaral, P., and A.B.,
F. (1985). Microcomputador de bordo para controle de
potˆencia de locomotivas em trac¸˜ao m´ultipla. In II Con-
gresso Nacional de Automac¸˜ao Industrial, volume 1,
pages 125–129, S˜ao Paulo, SP, Brazil.
Sato, D., Borges, A., Leite, A., Dordal, O., Avila, B., Enem-
breck, F., and Scalabrin, E. (2012). Lessons learned
from a simulated environment for trains conduction.
In Industrial Technology (ICIT), 2012 IEEE Interna-
tional Conference on, pages 533–538.
Schank, R. C. (1983). Dynamic Memory: A Theory of
Reminding and Learning in Computers and People.
Cambridge University Press, New York, NY, USA.
Spalzzi, L. (2001). A survey on case-based planning. Arti-
ficial Intelligence Review, 16(1):3–36.
Vacek, S., Gindele, T., Zollner, J., and Dillmann, R. (2007).
Using case-based reasoning for autonomous vehicle
guidance. In Intelligent Robots and Systems, 2007.
IROS 2007. IEEE/RSJ International Conference on,
pages 4271–4276.
Wang, C.-S. and Yang, H.-L. (2012). A recommender
mechanism based on case-based reasoning. Expert
Syst. Appl., 39(4):4335–4343.
Wooldridge, M. and Jennings, N. R. (1995). Intelligent
agents: Theory and practice. Knowledge Engineering
Review, 10(2):115–152.
AnEconomicApproachforGenerationofTrainDrivingPlansusingContinuousCase-basedPlanning
451
