
Trafforithm
A Traffic-aware Shortest Path Algorithm in Real Road Networks with Traffic
Influence Factors
Lin Qi and Markus Schneider
Department of Computer & Information Science & Engineering, University of Florida, Gainesville, Florida, U.S.A.
{lqi, mschneid}@cise.ufl.edu
Keywords:
Shortest Path Problem, Road Networks, Traffic Influence Factors, Modeling, Algorithm.
Abstract:
The shortest path computation between two given locations in a road network is an important problem that
finds applications in a wide range of fields. There has been a lot of research efforts targeting at the preciseness
and performance of finding shortest paths in road networks. However, rarely of them have really taken into
account the influence of traffic factors such as traffic lights, road conditions, traffic jams and turning cost. In
other words, existing approaches are rather purely based on the topology of the network, but forgot that there
are multiple factors in a real road network that impact the accuracy of the algorithm. The contribution of
our paper is twofold. First, we present a generic two-layered framework for moving objects in road networks
environment and demonstrate the important role of traffic factors on path finding and route planning. Second,
we develop an efficient parallel shortest path algorithm in road networks with the consideration of traffic influ-
ence factors. Detailed analysis presented shows that our parallel TRAFFic-aware shortest path algORITHM
(Trafforithm), is accurate and practical.
1 INTRODUCTION
Shortest path problems are among the most popular
network flow optimization problems, with interesting
applications in a range of fields. Given two locations
s and e in a road network, a distance query returns the
minimum network distance from s to e, while a short-
est path query computes the actual route that achieves
the minimum distance. These two types of queries
find important applications in practice, and a plethora
of solutions have been proposed in past few decades.
The basic concept of shortest path problem is to
model the specific problem in a suitable graph and
to compute a path with the minimum travel cost to
solve it. This is also known as a routing algorithm.
While it is relatively simple to come up with an algo-
rithm that just solves the problem, it is much harder to
develop an efficient, yet precise algorithm. Further-
more, the problems vary in different scenarios. For
instance, in a real-life road network, car journeys and
public transportations are regulated by traffic rules,
restricted by traffic lights, and are greatly influenced
by traffic jams. In addition, travelling along a route
with less left turns can be less time-consuming com-
pared to another route of the same length but with
more left turns. We call these factors as Traffic In-
fluence Factors (TIFs). As indicated previously, most
of current approaches neglect the influence of traffic
factors, which lacks some practical value. The reason
is that the shortest path may not always be the fastest
path (i.e. least cost) because of the influence of traffic
factors. The detailed discussion regarding TIFs will
be given out later in Section 3.2. By considering this
kind of effect, we can also provide users with different
route choices to avoid traffic congestions.
To address this problem, we would like to propose
our traffic-aware shortest path algorithm, Trafforithm,
which takes traffic conditions and turning costs into
consideration. People may argue that this kind of
information can only be stored aside from the net-
work topology, and hence it would lower the perfor-
mance of computing shortest paths when requesting
information. However, actually instead of regarding
traffic information as outside auxiliary contents, we
model this kind of information inside our data model
with a user-defined attribute, namely theme attr. In
this field, various kinds of information can be stored
as a bit sequence, an integer, or it may have a com-
plex type whose values represent combinations of n
values. Examples of thematic attributes range from
speed limits of a road to the capacity of an oil pipe.
Therefore we could store the traffic information of the
105
Qi L. and Schneider M..
Trafforithm - A Traffic-aware Shortest Path Algorithm in Real Road Networks with Traffic Influence Factors.
DOI: 10.5220/0005350701050112
In Proceedings of the 1st International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM-2015), pages
105-112
ISBN: 978-989-758-099-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

road network to this field attached to each point in the
network. With the help of our model, we then derive
some retrieval functions to peel off the hard-coded in-
formation stored in our network model.
The rest of the paper is organized as follows:
we summarize the related work in Section 2. Sec-
tion 3 shows the application-side analysis which
would stimulate our model needs and query supports.
Section 4 presents our generic two-layered framework
for road networks. The problem definition and the
body of the algorithm are given in Section 5. Some
key ideas on how to evaluate the proposed algorithm
are presented in Section 6. Finally, Section 7 con-
cludes the paper together with some directions of pos-
sible future improvements.
2 RELATED WORK
In this section, we will introduce the related work
and classify them into several categories. Tons of
works and contributions based on the shortest path
problem and route planning were proposed and care-
fully compared. Dijkstra’s algorithm (Dijkstra, 1959)
is the fundamental shortest path algorithm. It com-
putes the shortest paths from a single source node to
all other reachable nodes in the graph by maintain-
ing tentative distances for each node. A straightfor-
ward improvement of Dijkstra’s algorithm is bidirec-
tional search (Dantzig, 1962). An additional search
from the target node is performed in backward di-
rection, and the whole search process terminates as
soon as both directions meet. A* search (Hart et al.,
1968) algorithm integrates a heuristic into a search
procedure. Instead of choosing the next node with
the least cost, the choice of node is based on the cost
from the start node plus an estimate of proximity to
the destination. (Awasthi et al., 2005) proposed a
rule based method for evaluating the fastest path on
urban networks. This method uses a statistical ap-
proach based on clustering to compute rules useful
in predicting fastest paths. (Qi and Schneider, 2014)
came up with two algorithms to address the issue of
shortest path computation delay, leading to a realtime
response system. (Kanoulas et al., 2006) proposed
a traffic speed pattern named CapeCod by classify-
ing the time based on traffic flow. The paper used
A* algorithm to solve the fasted problem in various
departure times. A mining algorithm for travel time
evaluation was proposed in (Lu et al., 2008), which
used the mined knowledge to predict the future traffic
situations. And a continuous fastest path planning al-
gorithm (Lu et al., ) is proposed. It takes into account
the effects of traffic influence factors to avoid the traf-
fic congestions. Compared to our strategy, this ap-
proach requires two rounds of pre-computation, and
does not consider the turning cost. From network
analysis standpoint, researchers as in (Jiang, 2007)
and (Jiang and Liu, 2011) target at topological anal-
ysis as well as semantic analysis of urban networks.
The key idea in (Jiang and Liu, 2011) is to seek a
route with fewest turns based on the concept of natu-
ral roads. However, they did not distinguish left turn
cost from right turn cost, which is inaccurate in short-
est and fastest path computation.
Due to its ubiquitous usage over the web and real
life, shortest path search on graphs has also become a
major topic of interest over the last decade in commer-
cial systems. A good case study from (Demiryurek
et al., 2010) is presented based on commercial sys-
tems such as Navteq, TIGER, and TOMTOM etc,
Google maps (Google, ) and Navteq (Navteq, ) have
been actively providing real road network data set for
testing. TOMTOM (TOMTOM, ) has developed a
technology called IQ routes in the sense that the ac-
tual speed and travel time per roadstretch is measured
per time of day.
3 MOTIVATION
This section would give the motivation behind our
model and TIFs. First, we will introduce our model
motivation and state why database support is essen-
tial in Section 3.1. In Section 3.2, we will develop the
definition of TIFs, and analyze how they influence our
shortest path query results.
3.1 Model Motivation and Database
Support
The Geometric aspects of a road network comprise
junctions, routes, boundary points, and crossover
points that are embedded in space and characterized
by precise locations. In order to model the real road
network correctly and precisely, we regard the net-
work as a collection of points, and each point is at-
tached with a label. In our road network model, we
assign thematic attribute values to all points in the
network. These attribute values can be used to iden-
tify network components like routes and interaction
points. We call these values labels, and each point in
the Euclidean plane is mapped to a set of labels.
The major reason for the lack of a spatial net-
work data type in spatial databases is that it has not
been formalized due to the inherent complex nature
of spatial networks. The lack of model for spatial
network has led to the development of only a very
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
106
small number of operations on them. Since the inten-
tion is to incorporate the spatial network data type in
a database, we have to create an efficient implemen-
tation concept of spatial networks and incorporate it
inside the database. Based on the model of the spatial
network, we also explore ways of querying the spatial
network using a SQL-like language, such as network
algebra in (Kanjilal and Schneider, 2011) and SQL
extentions for moving objects in spatial networks in
(Qi and Schneider, 2012).
3.2 Traffic Influence Factors (TIFs):
Definition and Importance
Traffic Influence Factors (TIFs) are a collection of
factors that have influence on traffic route planning
and result in effect on traveling times in a road net-
work environment. TIFs have so far not been exten-
sively included in this area and it is important to con-
sider them because they have a huge influence on the
travelling time of a certain path. In reality, people
would like to find the Fastest Path (FP) to the destina-
tion rather than purely the shortest path in most cases.
However, there are cases that a shortest path may not
be the fastest one since more left turns and passing
more numbers of traffic lights are more time consum-
ing than the distance difference. As a result, the TIFs
should be considered while computing the real short-
est paths between the source and destination.
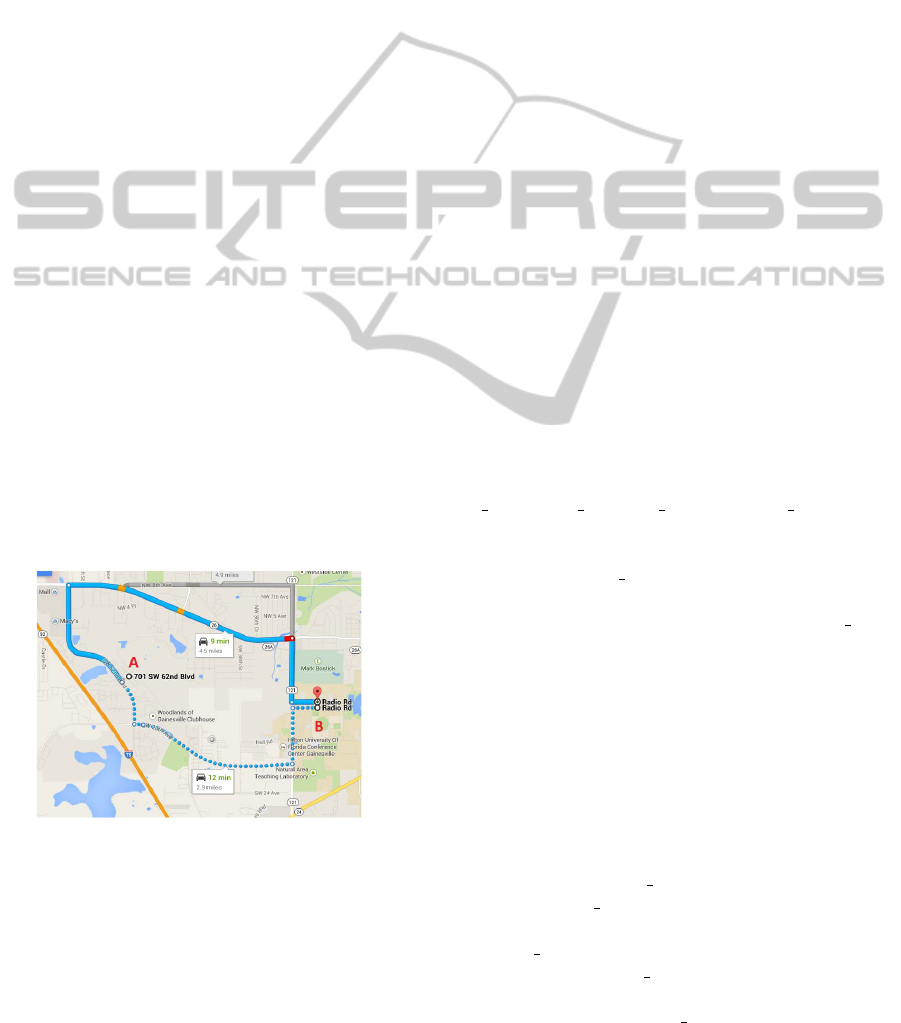
The factors we will consider here include the
right-turn effect, the number of traffic lights and other
factors. The number of right turns along the path
plays a very important role of the total traveling time.
Figure 1: Right-turn effect illustration.
For example in Figure 1, it shows that driving
along the solid route will be faster than the dotted one
even with 30 percent longer distance. One of the rea-
sons is that the solid route consists of three right turns
as the dotted one consists of three left turns.
4 A GENERIC TWO-LAYERED
FRAMEWORK FOR ROAD
NETWORKS
In this section, we lay out our proposed generic two-
layered framework for road networks. We would give
a formal and clear definition of our model. Besides,
we will also show how our model describes the net-
work and how it formulates the basis for distance and
shortest path queries. Due to the page limit, we would
briefly go through our model, one could find the de-
tailed parts of the model could be found in (Kanjilal
and Schneider, 2011), (Qi and Schneider, 2012).
A road network is a three dimensional spatially
embedded and labeled graph. Road networks are con-
sist of routes (i.e. roads), junctions (where two or
more routes intersect), and crossovers (where two or
more routes intersect but they do not geometrically
join). With the help of label space, we could ex-
press a road network with the help of spatial map-
pings. A spatial mapping of A, where A is a label
type, is a total mapping υ : R
3
→ 2
A
. The set of all
spatial mappings of type A is denoted by [A], that is,
[A] = R
3
→ 2
A
. When applied to a set X, the function
υ is iteratively applied to all the elements of X, i.e.
υ(X) = {υ(p)|p ∈ X }.
With the help of this framework, next let us
move on to the label space. Any label we
considered in our model is a tuple of the form
(id attr, access pt,theme attr). The id attr is the
route identifier and uniquely represents a particular
route in a network. This can be a route name or a route
number. The access pt is a boolean field and a value
of true for this field indicates that the particular point
is an access point otherwise it is a false. A theme attr
value may have a simple type such as integer or string,
or it may have a complex type whose values represent
combinations of n values. Examples of thematic at-
tributes range from speed limits of a road to the ca-
pacity of an oil pipe.
In this way, instead of regarding traffic informa-
tion as outside auxiliary contents, we could model
traffic information inside our data model. The next
question is how to retrieve such information for com-
puting in algorithms. Therefore we define a retrieval
function called T heme Attr to extract all informa-
tion from theme attr. It takes as argument a spa-
tial mapping υ of type A and computes the set of
all theme
attr values by using the projection opera-
tor u. Since the theme attr is assumed to be always
the 4th attribute in a label, we use u
{4}
to retrieve its
value. The function T heme Attr is therefore defined
Trafforithm-ATraffic-awareShortestPathAlgorithminRealRoadNetworkswithTrafficInfluenceFactors
107

for υ ∈ [A] as:
T heme Attr(υ) = {u
{4}
(l)|s ∈ υ(R(υ)),l ∈ s} (1)
5 Trafforithm: TRAFFIC-AWARE
SHORTEST PATH ALGORITHM
In this section, we will first give the problem defini-
tion of shortest path problem in Section 5.1. Followed
by that, the body of the algorithm as well as some
implementation ideas and speedup techniques will be
discussed in Section 5.2.
5.1 Problem Definition and
Preliminaries
In this subsection, we will give the formal definition
of our Shortest Path Problem (SPP). Let G = (V,E, w)
be a road network with a vertex set V , an edge set E
and a weight function. Each edge e ∈ E is associated
with a weight w(e) : e → R. In this case, the weight
function will give us the travel cost (which refers to
the travel time here) for each given edge. The trav-
eling time of a trip could be estimated from the road
speed restrictions and the road length, and we call this
traveling time as scheduled traveling time. This graph
G is directed, since some of the roads restrict the trav-
eling directions for vehicles, and dynamic traffic fac-
tors like road constructions or other traffic regulations
will also have effect on the traveling directions.
Given two vertices s,e ∈ V , the classical shortest
path query asks for a path p, which consists of a se-
quence of edges p =< e
1
,e
2
,...,e
k
> that connects
s and t such that the condition
∑
k
i=1
w(e
i
) is mini-
mized. However, in real road networks, only consid-
ering the total traveling cost without taking into ac-
count of TIFs is not enough. Therefore, we would
like to select the path with the minimum path cost in-
stead of simply minimizing the scheduled cost. Path
cost π for path p is defined as follows:
π(p) = α(T
p
s
) · RT R(p) + β(T
p
s
) · NT L(p) (2)
+ γ · T
p
s
+ θ ·
k
∑
i=1
OT F(e
i
)
where RT R(p) =
# o f right turns
# o f total turns
represents the
Right Turn Ratio over the total number of turns in
this whole path, and NT L(p) gives the total Number
of Traffic Lights in this path. T
p
s
is the total sched-
uled travel cost along this path. Note that the speed
limit could vary along the whole path, therefore we
need a summation of individual traveling time from
each edge piece within the path. And finally, if there
exist any other traffic influence factors among these
edges, we sum them up and add to the equation as
∑
k
i=1
OT F(e
i
). In other words, the real cost of a path
is jointly determined by RT R(p), NT L(p), T
p
s
and
∑
k
i=1
OT F(e
i
). As discussed in the motivation sec-
tion (Section 3), the number of right turns, the num-
ber of traffic lights, the total scheduled traveling time
and other traffic influence factors such as road site
and traffic jams all play very important roles in the
real cost of a path. In this paper, we will only con-
sider the first three components and neglect other fac-
tors OTF, however, this component presented in the
formula gives a potential extension of our model and
could be later on integrated easily.
Now let us switch gears to the coefficient func-
tions. α(T
p
s
) and β(T
p
s
) is the coefficient of RT R(p)
and NT L(p) respectively. And γ is the factor of T
p
s
.
These coefficient functions directly reflect the impor-
tance of RT R(p), NT L(p) and T
p
s
that they performed
in the formulation of path cost. Note that α(T
p
s
) is not
a constant but rather a function of w.r.t. T
p
s
. It is easy
to understand that the time spent on making turns can
be neglected in a long journey while it would be sig-
nificant in a short trip. Therefore α(T
p
s
) has a negative
correlation with T
p
s
, which is the total scheduled trav-
eling time. One alternative formula of α(T
p
s
) could
be
α(T
p
s
) = 1/ln(1 + T
p
s
) (3)
Similarly, β(T
p
s
) should also have negative correlation
with T
p
s
. To be more specific, for instance, we could
have
β(T
p
s
) = 1/T
p
s
(4)
The only difference is the log scale is missing, since
we have an assumption that the traffic lights influ-
ence is higher than the turns, therefore, without the
log scale, β(T
p
s
) makes this influence more relevant
and tighter to T
p
s
than α(T
p
s
). The exact expression of
α(T
p
s
), β(T
p
s
) should be learned and estimated from
the real-world traffic data. Here we only give two ex-
amples that address their positions in our path cost
concept. Finally, γ is a constant which emphasize or
deemphasize the importance of T
p
s
in the total expres-
sion, the real road network data could be fed to our
path cost concept in order to learn the approximate
sub-optimal expression of α(T
p
s
) and β(T
p
s
). Without
considering the OT F(e
i
), and if no ambiguities can
arise, we sometimes omit the parameter p and sim-
ply use α, β, and γ. Therefore we have the following
formula of path cost ready for our algorithm:
π(p) = α · RT R(p) + β · NT L(p) + γ · T
p
s
(5)
Note that given a path p, the way we compute path
cost is to look behind and then determine the RT R(p)
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
108
and NT L(p) in equation 5. We will exactly employ
this formula to compute the path cost in our algorithm
during the following sections.
5.2 Traffic-aware Shortest Path
Algorithm
5.2.1 Graph Partitioning
The graph partitioning problem can be defined as fol-
lows: Given a graph G = (V,E, w) with same settings
in the SPP definition above and |V | = n, |E| = m.
Partitioning G into subgraphs G
1
,G
2
,...,G
p
means
dividing V into a series of disjoint vertices subsets,
namely V
1
,V
2
,...,V
p
, such that (i) V
i
∩V
j
=
/
0,∀i 6= j
and (ii) ∪
1≤i≤p
V
i
= V . Once the graph is partitioned
into a number of subgraphs, the dependencies asso-
ciated with the edges connecting between different
subgraphs would play very important roles of com-
munication. We call these edges as Cutting Edges,
and the vertices that consist of these edges as Access-
ing Nodes. To sum up, a subgraph is a cluster of
nodes and contains two kinds of nodes: Inner Nodes,
whose all edges lead to nodes within the same sub-
graph; Outer Nodes, whose at least one edge connects
to another subgraph. One could see that the accessing
nodes are exactly the same with outer nodes. We will
use the notation V
i
j
and V
o
j
, where 1 ≤ j ≤ p, to repre-
sent inner nodes and outer nodes, and use the notation
E
i
j
and E
o
j
for inner edges and cutting edges, respec-
tively.
Partitioning is not simple. First of all, to take ad-
vantage of the graph structure, the cut cannot be ran-
dom, as it would fluctuate performance. It would be
ideal if we could equally cut the whole graph into
equivalent pieces. However, in real road networks,
the nodes are not distributed uniformly. Therefore, a
good partitioning is done subject to several optimal
constraints (
ˇ
Simek and
ˇ
Sime
ˇ
cek, 2011), (Tang and
Y. Zhang, 2008):
• An appropriate subgraph size must be chosen, or,
an appropriate number p of subgraphs should be
determined and self-adjusted.
• Nodes that belong to the same subgraph should be
geographically located near each other.
• The number of the nodes contained in G
i
is ap-
proximately equal, i.e., |V
i
| ≈ n/p;
• Total weights of cutting edges
should be minimized, i.e. minimize
∑
k−1
i=1
∑
k
j=i+1
∑
v
1
∈V
i
,v
2
∈V
j
w({v
i
,v
j
}).
However, choosing optimal graph partitioning is NP-
hard (Geary and Johnson, 1979). This problem, also
known as Minimum K-Cut Problem, can be reduced
to set cover problem and to obtain the exact solutions
is computationally intractable. To achieve subopti-
mal solutions, various heuristics have been proposed.
Among these methods, we will employ METIS li-
brary (MET, ) to achieve our goal. METIS is de-
veloped in the Karypis Lab, which is a widely used
software package for partitioning graphs based on a
multilevel paradigm.
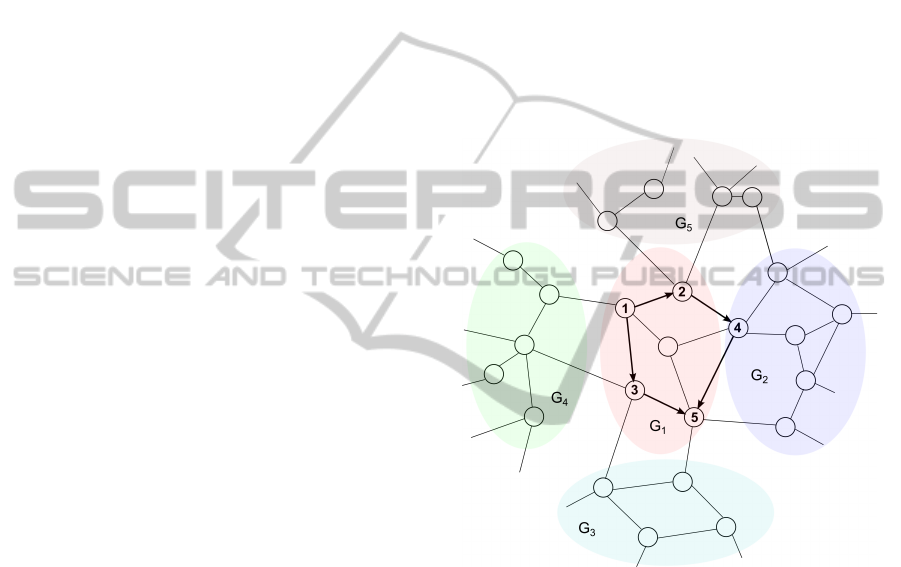
5.2.2 Trafforithm
In this subsection, we develop our parallel traffic-
aware shortest path algorithm, Trafforithm. It is per-
formed in three phases.
1
2
4
5
3
Figure 2: Example of subgraphs.
In the first phase, the graph partitioning described
in the previous subsection of the whole given net-
work will be done initially. Right after the partition-
ing, a temporary graph G
0
= (V
0
,E
0
,w) is constructed
where V
0
= ∪
p
j=1
V
o
j
and E
0
= ∪
p
j=1
E
r
j
. In the above
formula, E
r
j
represents the union of the cutting edges
E
o
j
and the set of edges connecting any two of the
nodes in V
o
j
directly. In other words, the temporary
graph G
0
consists of reduced variants of all subgraphs
except for the one where the start and end nodes
belong, which are in the form of non-reduced sub-
graphs containing in G
j
. Followed by this, for each
subgraph G
j
, the algorithm performs localized rout-
ing process, namely to build a table keeping track of
shortest distance between any pair of accessing points
(x,y) where x, y ∈ V
o
j
. This table is extremely helpful
when we apply our algorithm on the whole graph: we
Trafforithm-ATraffic-awareShortestPathAlgorithminRealRoadNetworkswithTrafficInfluenceFactors
109

only need to look up in the table to find the cost in
constant time when computing the total path cost. In
other words, it is like building up ”virtual” edges be-
tween any pair of the accessing points. And once the
this is finished, we do not need to run this partition
as well as these pre-computations again for the next
request. In other words, the pre-computation is quite
affordable since it only consumes time the first time
the network is generated or when some significant
changes happened in this network. In addition, this
step could be distributed into different threads since
the computations are all closed within subgraphs.
Next, when given the start point s and end point
e, the algorithm determines the indexes i
s
and i
e
of
the subgraphs that s and e belongs to, respectively.
In G
i
s
, the algorithm performs a local routing search
to find the shortest path from s to all the accessing
points of G
i
s
. Similar case would happen in G
i
e
. To-
gether with the temporary graph G
0
, we now are able
to build our reduced graph G
r
= (V
r
,E
r
,w) where
V
r
= V
0
∪ V
i
i
s
∪ V
i
i
e
and E
r
= E
0
∪ E
i
s
∪ E
i
e
. At this
point, the algorithm performs one iteration of modi-
fied Dijkstra’s algorithm with path cost. Then a tem-
porary shortest path P
r
based on the reduced graph G
r
is generated, from which we could get a list L
r
that
consists of indexes of all subgraphs containing edges
of the path P
r
. This is done as the second phase.
Note that if i
e
== i
s
, which means that the start
and end point belong to the same subgraph, we can-
not simply populate L
r
with this only index. The rea-
son is that this local shortest path may not be guar-
anteed to entirely become the globally shortest paths
considering the other subgraphs. An example can be
found in Figure 2, in which the shortest path from
node 1 to node 5 is to follow the path < 1,2, 4,5 >
rather than < 1, 3,5 > if π(< 1, 2,4, 5 >) is less than
π(< 1,3,5 >). Therefore, only considering the sub-
graph G
1
is not enough to find the global minimum.
Whenever this situation happens, the algorithm would
do a k-hop breadth first search (BFS) starting from s.
In other words, the indexes of subgraphs found within
k hops from s will all be added into the list L
r
, build-
ing up the reduced graph based on these subgraphs
together as shown in Figure 2. This k can either from
user input or be self-adjusted according to the size of
subgraphs.
In the third phase, a pruned graph G
p
is con-
structed from original subgraphs that appear corre-
spondingly in the list L
r
. Graph G
p
= (V
p
,E
p
,w)
is then a non-reduced graph, and from phase two we
have determined through these subgraphs an optimal
shortest path can be achieved.
The whole algorithm is presented in Algorithm 1.
Graph partitioning is done in line 3. In line 4, the
Algorithm 1: Trafforithm.
Input: G = (V,E, w),s,e,(k)
Output: Shortest path P
1 L
r
← NULL;
2 V
r
,V
p
← NULL; E
r
,E
p
← NULL ;
3 Graph partitioning using METIS library ;
4 Parallel localized subgraph routing
pre-computation ;
5 Identify the subgraph indexes i
s
,i
e
for s,e ;
6 if i
s
== i
e
then
7 L
r
.push(i
s
) ;
8 for index i f ound in k − hop BFS do
9 L
r
.push(i) ;
10 end
11 end
12 else
13 for each subgraph g ∈ G do
14 if index(g) == i
s
or index(g) == i
e
then
15 V
r
← V
r
∪V
index(g)
;
16 E
r
← E
r
∪ E
index(g)
;
17 end
18 else
19 V
r
← V
r
∪ ACC(index(g)) ;
20 for each pair {u,v} where u,v ∈
ACC(index(g)) do
21 if {u,v} ∈ E
index(g)
then
22 V
r
← V
r
∪ {u,v} ;
23 end
24 end
25 end
26 end
27 L
r
= runsp(G(V
r
,E
r
,w),s, e) ;
28 end
29 for each index i ∈ L
r
do
30 for each subgraph g ∈ G do
31 if index(g) == i then
32 V
p
← V
p
∪V
index(g)
;
33 E
p
← E
p
∪ E
index(g)
;
34 end
35 end
36 end
37 P ← ParallelPathComp(G(V
p
,E
p
,w),s, e) ;
38 return P ;
algorithm performs the routing pre-computation on
subgraphs. Line 5 and 6 give the indexes of subgraphs
that s and e belongs to respectively. If they are iden-
tical, line 7 to 11 generate the index list L
r
. Other-
wise, a reduced graph G
r
is constructed from line 13
to 28. Neighbor(i) is a method that returns a list of
indexes of subgraphs that are adjacent to the given
subgraph of index i and index(g) is a method that
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
110

retrieves the index of a given subgraph g. Note that
ACC(index(g)) gives a set of accessing points of sub-
graph g, i.e. V
o
index(g)
. Followed by that, the first run is
performed in line 27, and runsp(G,s,e) is a function
that returns a list of indexes of all subgraphs contain-
ing edges of the shortest path from s to e in graph G.
The pruned graph based on this list L
r
is generated
from line 29 to 36 either from case that s and e be-
longs to the same subgraph or the other way around.
G(V,E,w) is a graph constructor given a vertice set V ,
an edge set E and a weight function w. And finally,
a parallel path computing is performed on this pruned
graph G
p
and the real shortest path P is returned in
line 37 and 38.
Algorithm 2: Parallel Path Computation.
Input: Pruned graph G
p
= (V
p
,E
p
,w),s, e
Output: Shortest path P
1 S ← NU LL, P ← NULL ;
2 Q
1
,Q
2
← NULL,P
1
,P
2
← NULL ;
3 mark all nodes (except for s) unvisited ;
4 S ← S ∪ {s} ;
5 select node n with argmin
n
{π(< s,n >)} ;
6 Q
1
.insert(n) ;
7 >> For each of the two threads:
8 while true do
9 {u,v}({v,u}) ← Q
1
.removeMin() ;
10 if v(u) has been visited then
11 Break ;
12 end
13 P
1
.add({u,v}) ;
14 mark {u,v} as visited ;
15 if v /∈ S then
16 S ← S ∪ {v} ;
17 select node n with argmin
n
{π(P
1
n)}
Q
1
.insert(n) ;
18 end
19 select n with argmin
n
{π(P
1
≺ v n)} ;
20 Q
1
.insert(n) ;
21 end
The parallel bidirectional path computing process
is presented in Algorithm 2. It fist marks all nodes un-
visited except for s and select the node n with the least
path cost when forming a new path < s, n > in line 3
to 6. In the first thread, each time we extract the node
leading to the minimum path cost from the queue Q
1
and mark it as visited and examine all its neighbors’
path cost during line 8 to 19. At the end we also insert
the minimum path cost leaving from the starting node
of the newly inserted edge in line 20 and 21. Sym-
bol is used to extend the current path (on the left)
with the path right to this symbol while ≺ means to
remove the sub-path on the right from the path (on the
left). Hence P ≺ v n means to remove v from the
end of P and add n to the end instead in line 20. In the
second thread, we merely take similar moves, and we
use variables in round brackets to distinguish from the
first thread in the algorithm like in line 9 and 10. Note
that the graph is directed, each time we examine from
the end to the start, before adding to the queue, we
have to switch to the normal moving direction. The
algorithm will stop if one direction touches an edge
that has already been visited by the other direction. In
other words, we break the loop like in line 11 when
we touch a certain node that has been marked as vis-
ited previously. In general, this algorithm adds nodes
to S in order of increasing distance from start node s
and therefore we could incrementally get our shortest
path P from s to e eventually.
6 EVALUATION
In this section, we will present some ideas and differ-
ent phases on how to evaluate our proposed algorithm.
Firstly, our method relies on the choice of proper val-
ues for the parameters α(T
p
s
), β(T
p
s
), and γ. In a first
set of experiments, we would analyze how to learn
appropriate values for these coefficients. With respect
to these experiments we report about results of our
algorithm related to the final outcome of its last it-
eration. To achieve this, the real road network data
could be fed to our path cost concept in order to learn
the approximate sub-optimal expression of path cost.
This learning process is unsupervised, with conver-
gence on α(T
p
s
), β(T
p
s
), and γ.
After that, in the second phase, by considering
traffic influence factors, we will compare the short-
est path result from our algorithm with some of the
prevailing algorithms including ALT (Goldberg and
Harrelson, 2005), Arc Flags (Hilger et al., 2006), and
Transit Node Routing (Bast et al., 2007), (Bast et al.,
2006) as well as the classical Dijkstra’s algorithm (Di-
jkstra, 1959) and A* search (Hart et al., 1968). The
testing environment is Windows 7 with Intel i7-4770
3.4 GHz CPU and 16 GB RAM with stable working
state. The quad cores will fully utilize the parallelism
design of our algorithm.
The efficiency and effectiveness of a shortest path
algorithm should be evaluated based on (but not lim-
ited to) the following criteria:
• Pre-processing time. Quite a number of prevailing
algorithms perform a pre-processing phase. It is
reasonable to include the pre-processing time into
comparison.
• Average response time. The average response
time to shortest path queries will be the most im-
Trafforithm-ATraffic-awareShortestPathAlgorithminRealRoadNetworkswithTrafficInfluenceFactors
111

portant factor that judges the effectiveness and
quality of the algorithms.
• Recovery interval. Considering the continuous
changes of the network, like traffic jams and road
constructions, where certain paths are blocked,
the ability (and the time it takes) of recovering
from such changes and returns to the state of
query-ready is another important measure of the
merits of the algorithms.
7 CONCLUSIONS AND FUTURE
WORK
In this article, we point out the importance of traf-
fic influence factors in route planning in a road net-
work environment. Based on our proposed generic
two-layered model, an efficient multi-thread shortest
path algorithm with the consideration of traffic influ-
ence factors is presented. With this framework, we
could demonstrate the value of our algorithm and how
it leads to fast, accurate and practical search results.
In addition, we have presented some ideas on how
to evaluate our algorithm performance. Future work
would include the implementation of our algorithm
and empirical experiments.
REFERENCES
Metis, www.cs.umn.edu/metis.
Awasthi, A., Lechevallier, Y., Parent, M., and Proth, J. M.
(2005). Rule based prediction of fastest paths on urban
networks. In 8th Intl. IEEE Conference on Intelligent
Transportation Systems.
Barrat, A., Barth
´
elemy, M., Pastor-Satorras, R., and Vespig-
nani, A. (2004). The architecture of complex weighted
networks. In Proc Natl Acad Sci, volume 101, pages
3747–3752.
Bast, H., Funke, S., and Matijevic, D. (2006). Transit: ul-
trafast shortest-path queries with linear-time prepro-
cessing. In Proc. of the 9th DIMACS Implementation
Challenge, pages 175–192.
Bast, H., Funke, S., Sanders, P., and Schultes, D. (2007).
Fast routing in road networks with transit nodes. Sci-
ence, 316(5824):566.
Dantzig, G. B. (1962). Linear Programming and Exten-
sions. Princeton University Press.
Demiryurek, U., Banaei-Kashani, F., and Shahabi, C.
(2010). A case for time-dependent shortest path com-
putation in spatial networks. In Proceedings of the
18th SIGSPATIAL Intl. Conf. on Advances in Geo-
graphic Information Systems, pages 474–477.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1:269–271.
Freeman, L. (1978). Centrality in social networks: Concep-
tual clarification. In Social Networks, volume 1, pages
215–239.
Geary, M. R. and Johnson, D. S. (1979). Computers and In-
tractability: A Guide to the Theory of Incompleteness.
W.H. Freeman and Company.
Goldberg, A. V. and Harrelson, C. (2005). Computing the
shortest path: A* search meets graph theory. In SODA,
pages 156–165.
Google. Google maps, www.maps.google.com.
Hart, P. E., Nilsson, N., and Raphael, B. (1968). A formal
basis for the heuristic determination of minimum cost
paths. In IEEE Transactions on Systems Science and
Cybernetics, volume 4, pages 100–107.
Hilger, M., E. K
¨
ohler, R. H. M., and Schilling, H. (2006).
Fast point-to-point shortest path computations with
arc-flags. In Proc. of the 9th DIMACS Implementa-
tion Challenge, pages 73–92.
Jiang, B. (2007). A topological pattern of urban street net-
works: universality and peculiarity. Physica A: Stat.
Mechanics and its Applications, 384(2):647–655.
Jiang, B. and Liu, X. (2011). Computing the fewest-turn
map directions based on the connectivity of natural
roads. International Journal of Geographical Infor-
mation Science, 25(7):1069–1082.
Kanjilal, V. and Schneider, M. (2011). Modeling and query-
ing spatial networks in databases. JMPT.
Kanoulas, E., Y. Du, T. X., and Zhang, D. (2006). Finding
fastest paths on a road network with speed patterns. In
22nd International Conference on Data Engineering.
Lu, E. H.-C., Huang, C. W., and Tseng, V. S. Continuous
fastest path planning in road networks by mining real-
time traffic event information.
Lu, E. H.-C., Lin, C.-C., and Tseng, V. S. (2008). Mining
the shortest path within a travel time constraint in road
network environments. In 11th Intl. IEEE Conference
on Intelligent Transportation Systems.
Navteq. Navteq, www.maps.navteq.com.
Qi, L. and Schneider, M. (2012). Monet: Modeling and
querying moving objects in spatial networks. In 3rd
ACM SIGSPATIAL Int. Workshop on GeoStreaming.
Qi, L. and Schneider, M. (2014). Realtime response of
shortest path computation. In 7th ACM SIGSPATIAL
International Workshop on Computational Trans-
portation Science (IWCTS), volume 4.
ˇ
Simek, F. and
ˇ
Sime
ˇ
cek, I. (2011). Improvement of short-
est path algorithms through graph partitioning. In
Proceedings of Intl. Conf. Presentation of Mathemat-
ics’11, pages 131–137, Liberec. Technical University.
Tang, Y. and Y. Zhang, H. C. (2008). A parallel shortest
path algorithm based on graph-partitioning and itera-
tive correcting. In 10th IEEE International Confer-
ence on High Performance Computing and Communi-
cations, pages 155–161.
TOMTOM. Tomtom iq-routes, www.tomtom.com/page/iq-
routes.
GISTAM2015-1stInternationalConferenceonGeographicalInformationSystemsTheory,ApplicationsandManagement
112
