
Interactive Control of Dance Groups Using Kinect
Asako Soga and Itsuo Yoshida
Faculty of Science and Technology, Ryukoku University, 1-5 Yokotani, Oe-cho, Seta, Otsu, Japan
Keywords: Kinect, Motion Data, Dance Groups, Gesture Recognition.
Abstract: This paper describes a system that can control the CG animation of dance groups in a virtual world by
recognizing gestures using Kinect in real time. The system can change the formation of CG dancers by right-
arm gestures and their motions by left-arm gestures. Moreover, a virtual camera is controlled by the gestures
of both arms. The rotational data of the joints are used to recognize each arm gesture to control the dance
groups, and the translational data of the joints are used to control the virtual camera. Since the system
recognizes both arm gestures at the same time, users can control two or more objects by a combination of
gestures.
1 INTRODUCTION
In recent years, many cultural ceremonies and
traditional dances have been archived with digital
technologies. Motion capture technologies are used
for archiving traditional dances, and digital contents
with realistic motion have been widely used. Many
researches support about education and the creation
of traditional dances using archived motion data.
The purpose of this research is to develop systems
that can intuitively control CG animations by human
actions using motion data and interactive techniques.
We have been developing simulation systems for
dance groups to simulate multiple CG characters
(Soga, 2010) (Soga, 2012). In this paper, we describe
a control system for dance groups using Kinect in real
time.
Simulation systems for groups and crowds have
already been developed (Kwon, 2008). Many studies
have used such general human motion data as
walking and running as well as interactive authoring
of human groups (Ulicny, 2004). However deriving
complex human motions in composition remains a
challenge.
Since it is easy to capture human body motion
with Kinect devices, applications using them are
being used for entertainment, rehabilitation, and
dance training (Marquardt, 2012). Our system
simulates dance groups and can change human
motions as well as the formation of dance groups. By
recognizing human gestures with Kinect, a user can
interactively change the formations and the motions
of CG dancers arranged in 3D space. This paper
describes a method to recognize gestures by Kinect
and to control dance groups.
2 SYSTEM OVERVIEW
This system simulates the motion of multiple dancers.
The motion or formation of dance groups in the
virtual world is changed by gestures that are
recognized by capturing human motions and tracking
them by a Kinect device in real time. The camera
view in the 3D world is also changed by gestures.
Since the system simultaneously recognizes both arm
gestures, users can control two or more objects by a
combination of gestures. They can also change the
formation of the groups by right-arm gestures and the
motions of virtual dancers by left-arm gestures.
Therefore, users can manipulate the virtual dancers
like a stage director and control the dance motions
and formations by the postures that are often used in
ballet.
Our system runs on a personal computer with a
Windows OS and is operated with a Kinect. We
developed it using Visual C++, DirectX, and Kinect
for Windows SDK. The DX Library handles DirectX.
Figure 1 shows the system configuration.
Dance animations were obtained from a
professional dancer using an optical motion capture
system. Motion clips of classical ballet steps for the
dance groups were prepared for the system. Users can
arbitrarily select the dance motions of virtual dancers.
362
Soga A. and Yoshida I..
Interactive Control of Dance Groups Using Kinect.
DOI: 10.5220/0005357303620365
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 362-365
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
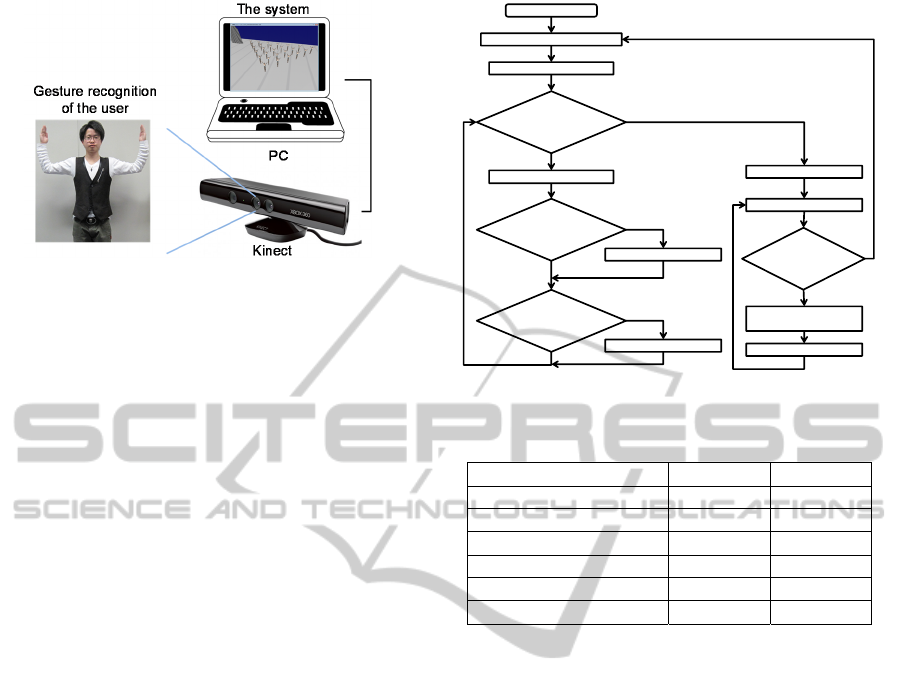
Figure 1: Configuration of system.
3 GESTURE RECOGNITION
3.1 Process
Figure 2 shows the process of gesture recognition.
This system has two modes: group control and
camera control. Although users usually operate it in
the group control mode, they can switch to the camera
control mode by recognizing a specific pose only if
they want to change to the camera view. In the gesture
recognition process, first, the system tracks the
skeletons of users and gets the positions of each joint.
If the system recognizes the gesture for changing the
mode, the mode is changed; otherwise the system
runs the process of the selected mode.
In the group control mode, each joint angle is
calculated by the captured joint positions. For
example, if the system recognizes a gesture defined
by the angles of the right arm, it changes the
formation of the dance groups. In the same way, if it
recognizes a gesture defined by the angles of the left
arm, it changes the motion of the dance groups. These
processes are executed for each frame.
In the camera control mode, the system recognizes
the position of the captured joint to adapt the moving
distance to the camera angle. First, the system records
the positions of both hand joints when the mode is
changed to this mode and calculates the distance
between the recorded and current positions. The angle
of the camera view is changed based on the moving
distance.
3.2 Gesture Recognition by Angles
In the control mode of the dance groups, joint angles,
which are used to recognize gestures, are calculated
by the inner product of vectors between the joints of
the base pose and the captured joints. The rotational
angles of the shoulder and elbow joints are calculated
Figure 2: Process of gesture recognition.
Table 1: Arm gestures and their rotational angles.
gesture shoulde
r
elbow
horizontal 0 0
upper circle -45 -45
lower circle 45 45
r
i
g
h
t
an
g
le 0 -90
upper oblique -45 0
lower oblique 45 0
with the positions of the shoulder, elbow, and hand
and used to recognize the arm gestures. These
gestures are recognized by comparing these angles to
the angles of each pose that are predefined in the
template file. Table 1 shows the predefined six
gestures and their rotational angles for the Z-axis. All
angles for the X and Y-axes are defined as zero degree.
Figure 3 shows examples of arm gestures.
The rotational angles are calculated by the
average angle of ten frames to avoid misrecognition.
The recognition succeeds if the difference between
the predefined angle and the calculated average angle
is less than 15 degrees since users have difficulty
inputting the complete pose.
3.3 Gesture Recognition by Positions
In the camera control mode or the mode change, the
relational positions of joints are used to recognize
gestures. When an arm is stretched outward, the mode
is changed to the translation mode. When both hands
are placed in front of the chest, the mode is changed
to the rotation mode.
To switch to the rotation mode, the pose must
satisfy three conditions; the distance of both hands is
narrower than that of the shoulders, both hands are
Control mode: dance groups
Skeleton tracking
Calculation of joint angle
Change the formation
Skeleton tracking
Start
Mode change
gesture is
recognized
Right-arm gesture
is recognized
Calculation of
translation data
YES
NO
YES
YES
YES
NO
NO
NO
Change motions
Change viewpoint
Right-arm gesture
Is recognized
Control mode: camera
Mode change
gesture is
recognized
InteractiveControlofDanceGroupsUsingKinect
363
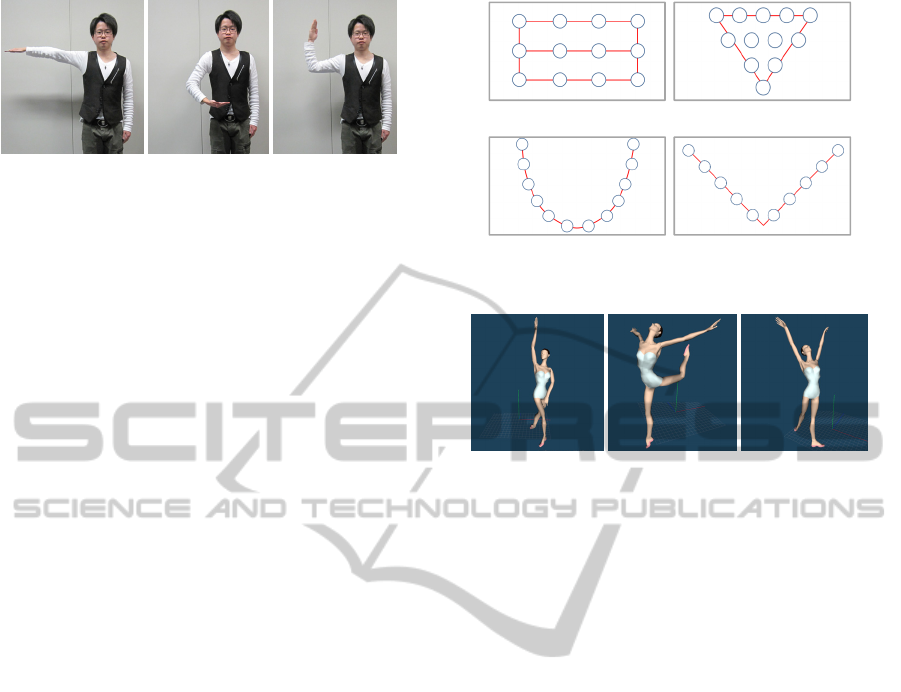
(a) horizontal (b) lower circle (c) right angle
Figure 3: Examples of arm gestures.
placed in front of the torso, and the height of each
hand is between the chest joint and the top of the head.
To switch to the translation mode, the pose must
satisfy two conditions; a hand is placed in front of the
torso, and the depth distance of the hand from the
torso is longer than the half of the arm.
To release these modes, the following conditions
are required. To release the rotation mode, the
distance between both hands has to be wider than that
of the shoulders. For the translation mode, the
distance between both hands should be less than ten
centimeters. After switching to the camera control
mode, the virtual camera can be moved and rotated
by the hand in each direction, such as up-down and
right-left.
When switching the mode, the system records the
hand position, and the distance between the recorded
and current positions is applied to the translation or
the rotation of the camera. In the rotation mode, the
moving distance for each axis is adapted to the
rotation angle, and in the translation mode, the
moving distance for the XZ plane is adapted to the
translation of each axis. To release the camera mode,
both hands are required to overlap.
4 INTERACTIVE CONTROL BY
GESTURES
The user changes the formation of the CG dancers by
right-arm gestures and their motions by left-arm
gestures. When a right-arm gesture is recognized,
each CG dancer moves to the defined position based
on the formation and the number of CG dancers.
When a left-arm gesture is recognized, the motion of
each CG dancer is changed based on the gesture.
We prepared six typical formation patterns:
straight line, circle, rectangle, triangle, curve, and V-
letter line. Figure 4 depicts examples of the formation
patterns. The system automatically calculates the
dancer positions based on the number of dancers.
Easy and intuitive gestures are assigned to the six
formations. For example, horizontally stretching the
right arm arranges the CG dancers in a line. Ballet
(a) rectangle (b) triangle
(c) curve (d) V-letter line
Figure 4: Formation patterns for dance groups.
(a) pose (b) attitude (c) port de bras
Figure 5: Examples of dance motions.
motions likely to be performed with the formation are
assigned to the six left-arm gestures, since it is easy
to perform the same gestures for both arms. Figure 5
shows examples of the dance motions. If the user
makes the same gesture for both arms, the CG dancers
perform ballet steps that are often seen in a formation
corresponding to the right-arm gesture.
Table 2 shows the gestures and the corresponding
formations and ballet motions. Figure 6 shows a
combination of gestures. Figure 6(a) is an example of
the same gestures for both arms, and Figure 6(b) is
different gestures for both arms. The corresponding
results are shown in Figure 7.
5 EXPERIMENT
We conducted an experiment with nine students who
seldom play videogames with Kinect. After
explaining the experiment process, the required task,
and the system usage, they tried the system and
performed the task. Then the unused functions of the
system were explained, and they answered
questionnaires. They mainly tried the formation
change, the dance motion change, and manipulations
of both arms. As a task, the students arranged the CG
dancers in the indicated formation and with the
required dance motion. The following three factors
were evaluated on five levels (1: bad, 5: good): (a)
suitability of manipulation and gestures, (b)
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
364

Table 2: Gestures and corresponding formations and ballet
motions.
Gestures Formation Dance
horizontal strai
g
ht line
p
ose
u
pp
er circle circle attitude
lower circle curve arabes
q
ue
r
i
g
h
t
an
g
le rectan
g
le
p
ort de bras
u
pp
er obli
q
ue V-letter line
p
as de chat
lower obli
q
ue trian
g
le
p
as de buorrée
(a) identical gestures (b) different gestures
Figure 6: Examples of gestures of both arms.
simplicity and memorability of manipulation, and (c)
velocity and suitability of reactions.
The averages of the nine students were (a) 3.6, (b)
3.8, and (c) 2.7. In terms of (a) the suitability of
manipulation and gestures and (b) the simplicity and
memorability of the manipulation, the results were
mostly good. However, (c) the velocity and the
suitability of the reactions was worse than the others.
User feedback suggested that we include finger
gestures, but different gestures for both arms were
acceptable. Negative comments complained that the
manipulations were complex, and that the gestures
were difficult to memorize. However, most students
seemed to use our system easily after they got used to
its manipulations.
6 CONCLUSIONS
This paper described a system that can control the CG
animation of dance groups in a virtual world by
recognizing gestures using Kinect in real time. By
recognizing human gestures, a user can interactively
change the formations and motions of CG dancers
arranged in 3D space. Moreover, a virtual camera is
controlled by the gestures of both arms. We
experimentally verified that (a) the suitability of the
manipulation and the gestures and (b) the simplicity
and the memorability of the manipulation of the
system are better than (c) the velocity and the
suitability of the reactions.
However, this system only recognizes human
poses and cannot recognize human motions. In future
work, the recognition of the motions of arms and legs
will be supported to improve our system. In addition,
the motions of the person who is controlling the dance
groups might become a type of motion or enhance the
prepared motion.
(a) identical gestures
(b) different gestures
Figure 7: Results for controlling dance groups.
REFERENCES
Soga, A., Boulic, R. and Thalmann, D., 2010. Motion
Planning and Animation Variety using Dance Motion
Clips, In CW '10, Proceedings of the 2010 International
Conference on Cyberworlds, pp. 421-424.
Soga, A., Yoshida I., 2012. A Simulation System for Dance
Groups using a Gamepad, In GRAPP2012, Proceedings
of 7th International Conference on Computer Graphics
Theory and Applications, pp.365-368.
Kwon, T., Lee, K. H., Lee, J. and Takahashi, S., 2008.
Group Motion Editing. In ACM Transactions on
Graphics, Vol. 27, No. 3, Article 80.
Ulicny, B., Ciechomski, P. H. and Thalmann, D., 2004.
Crowdbrush: Interactive Authoring of Real-time Crowd
Scenes. In SCA '04, Proceedings of the 2004 ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation, pp. 243-252.
Marquardt, Z., Beira, J., Em, N., Paiva, I. and Kox, S., 2012.
Super Mirror: A Kinect Interface for Ballet Dancers. In
CHI EA '12, Proceedings of the 2012 ACM Annual
Conference on Human Factors in Computing Systems
Extended Abstracts, pp. 1619-1624.
InteractiveControlofDanceGroupsUsingKinect
365
