
Bi-modal Face Recognition
How combining 2D and 3D Clues Can Increase the Precision
Amel Aissaoui
1
and Jean Martinet
2
1
USTHB, Bab Ezzouar, Algeria
2
Lille 1 University, Villeneuve-d’Ascq, France
Keywords:
Face Recognition, Multimodal, 2D, 3D, LBP, RGB-depth.
Abstract:
This paper introduces a bi-modal face recognition approach. The objective is to study how combining depth
and intensity information can increase face recognition precision. In the proposed approach, local features
based on LBP (Local Binary Pattern) and DLBP (Depth Local Binary Pattern) are extracted from intensity
and depth images respectively. Our approach combines the results of classifiers trained on extracted intensity
and depth cues in order to identify faces. Experiments are performed on three datasets: Texas 3D face dataset,
BOSPHORUS 3D face dataset and FRGC 3D face dataset. The obtained results demonstrate the enhanced
performance of the proposed method compared to mono-modal (2D or 3D) face recognition. Most processes
of the proposed system are performed automatically. It leads to a potential prototype of face recognition using
the latest RGB-D sensors, such as Microsoft Kinect or Intel RealSense 3D Camera.
1 INTRODUCTION
2D face recognition is a mature research domain, with
typically high matching precision in specific contexts.
It mainly deals with images – color or grey-level –
acquired via a usual camera, representing faces’ vi-
sual appearance. Because all human faces are simi-
lar in their configurations (inter-class similarity) and
the appearance of a given face can greatly vary due
to e.g. changes in pose, expression, or illumination
(intra-class variation), unconstrained 2D facerecogni-
tion is a hard problem. Indeed, using only face inten-
sity images yields to a high sensitivity to intra-class
variations. The past decades have witnessed tremen-
dous efforts focused towards 2D face images (Zhao
et al., 2003). Despite the great progress achieved
so far within the field, 2D image is still not reliable
enough (Abate et al., 2007), especially in the pres-
ence of pose and illumination changes (Phillips et al.,
2000).
3D face recognition was proposed as a potential
solution for face recognition. These approaches are
based on 3D shape data from faces (Bowyer et al.,
2006) obtained with specific equipments such as laser
scanners. Using the face 3D shape allows a high in-
variance to illumination and pose variation; a high
face recognition accuracy was reported in the litera-
ture using 3D approaches (Phillips et al., 2005). How-
ever, 3D data need expensive equipment and human
cooperation, which limits their application field. Be-
sides, they always require accurate registration before
shape-based 3D matching. Matching methods of 3D
scans are very expensive in terms of CPU resources
and time processing since they are based on optimiza-
tion of complex geometric equations. In order to by-
pass the time processing issue of the 3D matching
methods, researchers now tend to focus on using face
range images instead of 3D point clouds. Such kind
of methods emerged recently specially with the rapid
development in 3D imaging systems, such as time-
of-flight cameras or the Microsoft infrared camera
Kinect, which brought a major solution to use range
images without dealing with expensive equipments.
Although 3D recognition does not suffer from
light or pose changes, it does not benefit from visual
information – such as textures. In recent years, the
wide availability of RGB-D sensors has opened new
research directions in face recognition and bi-modal
2D+3D face recognition using intensity and depth in-
formation received a high attention from researchers
in the field. Depth and texture play complementary
roles in the coding of faces as they typically repre-
sent different characteristics of the face to be recog-
nized. The 2D image provides informations about
face textured regions with little geometric structure
(e.g. hairy parts, eyes, eyebrows), and the 3D data
559
Aissaoui A. and Martinet J..
Bi-modal Face Recognition - How combining 2D and 3D Clues Can Increase the Precision.
DOI: 10.5220/0005359605590564
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 559-564
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

provides informations regarding less textured regions
(e.g. nose, chin, cheeks). Hence, using the shape in-
formation in addition to the intensity images allows a
better face representation and therefore better preci-
sion and robustness in face recognition.
In this paper, we introduce a novel bi-modal
framework for face recognition. Our objective is to
use the intensity and depth information in order to ob-
tain more accuracy and robustness in face recognition
compared to mono-modal approaches. Our approach
is based on local attributes calculated from intensity
and depth face images. We use the well known LBP
descriptor (Ojala et al., 2001; Ojala et al., 2002) for
intensity feature extraction. Aside from its simplic-
ity and compactness, the LBP have demonstrated a
good discriminative power in face recognition litera-
ture (Huang et al., 2011). Unlike most bi-modal ap-
proaches that use the same descriptor for both modal-
ities (Chang et al., 2003; Xu et al., 2009; Jahanbin
et al., 2011; Huang et al., 2009), we use the DLBP,
which is an extension of the LBP dedicated for range
images, in order to extract the depth cues. This allows
extracting of more discriminative features from depth
images. Facial cues from the 2D and 3D images are
used to train classifiers, and their decisions are com-
bined in order to find the final identity decision.
The remainder of the paper is organized as fol-
lows. Section 2 describes related works on 2D and
3D face recognition methods and show the comple-
mentarity of both techniques. Section 3 introduces
the proposed bi-modal approach for face recognition.
Section 4 presents experimental results on three col-
lections that demonstrates the performances of the
proposed method. Section 5 gives a conclusion to our
work.
2 RELATED WORKS
Many approaches have been proposed for face recog-
nition from intensity images (Abate et al., 2007;
Bowyer et al., 2006) and a multitude of 2D face de-
scriptors was proposed in the literature (Zhao et al.,
2003). Among these descriptors, Local Binary Pat-
terns (LBP), first proposed by Ojala et al. (Ojala et al.,
2001; Ojala et al., 2002), are widely used. They en-
codes pixel-wise information in a given image. The
operator describes each pixel with the relative grey-
level values of its neighboring pixels:
LBP
(R,V)
(x, y) =
V− 1
∑
i=0
s(n
i
− n
c
)2
i
, (1)
with s(k) =
1 if k ≥ 0
0 otherwise
where :
• n
c
is the grey level value of the central pixel from
the local neighborhood;
• n
i
are the grey level values of the neighbor pixels
around the central pixel with a radius R.
In order to acquire 3D data without using expen-
sive laser scanners, an increasingly popular method
consists in using depth sensors, such as time-of-flight
cameras or the Microsoft Kinect infrared sensor. Be-
sides, classic image descriptors seem to be convenient
for face representation in such images. The advantage
of using range images is that features can be easily
extracted from raw data, which allows fast process-
ing. They also lie in a 2D dimensionality, which avoid
heavy computational cost. Moreover, depth data lie
in the 2D domain (while representing 3D data), and
can therefore be dealt with using standard 2D imag-
ing techniques.
Huang et al. (Huang et al., 2006) proposed an
extended LBP version, named 3DLBP, designed to
describe face depth images. Beside the information
provided by LBP, 3DLBP also considers the magni-
tude of the difference between the central pixel and
its neighborhood. However, this coding scheme suf-
fers from 3 drawbacks: the feature vector size is
very large, the coding principle is very sensitive to
the depth variations, and it is limited to small radius.
Other extensions have been proposed such as Local
Derivative Patterns (Zhang et al., 2010) and more re-
cently Local Vector Patterns (Fan and Hung, 2014;
Hung and Fan, 2014) for taking into consideration
high-order local pattern variations than just the first
order with usual LBP. Other descriptors dedicated to
face range images were recently introduced such as
Depth Local Quantized Pattern (DLQP) by Mantecon
et al. (Mantecn et al., 2014). In our earlier works,
we have proposed the Depth Local Binary Pattern
(DLBP) (Aissaoui et al., 2014) as a powerful exten-
sion to LBP dedicated to face range images. DLBP
is a compact descriptor, and the coding scheme is
stable according to small changes in depth values of
the neighborhood. Unlike 3DLBP and DLQP, it is
designed for large radiuses in order to extract more
discriminative features from smooth and low-contrast
data, since it works on a multi-scale level.
Bi-modal 2D+3D face recognition makes use of
both modalities to represent a face, with the objec-
tive of taking advantage of both 2D and 3D data
complementarity. Combining 2D and 3D information
can be performed using different strategies (Husken
et al., 2005). The most used strategy is the late fusion
which takes place at the decision stage. Therefore,
we consider this strategy when combining depth and
intensity cues in the proposed system. Both 2D and
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
560

3D methods are affected by face expression changes,
which is an open issue that is not addressed in this
paper.
3 PROPOSED APPROACH FOR
BI-MODAL 2D-3D FACE
RECOGNITION
Our approach consists in recognizing faces using two
modalities: 2D (intensity image) and 3D (depth im-
age). First, 2D and 3D features are extracted from
intensity and depth face images using the LBP and
the DLBP descriptor, respectively. Then, 2D and 3D
classifiers are constructed using a Support Vector Ma-
chines based training algorithm. Finally, a late fusion
consisting in combining decisions from 2D and 3D
classifiers is applied.
3.1 Feature Extraction: LBP and DLBP
LBP is considered to be one of the simplest and most
efficient local 2D face descriptors. For this reason, we
use the conventional LBP (See Section 2) in order to
extract features from intensity images.
85
99
21
86
54
54
13
12
57
1
1
0
0
1
1
1
0
Thresholding
LBP code : 167
Difference
31
45
-33
32
0
-41
-42
3
Figure 1: Illustration of LBP coding for a given pixel.
In order to extract depth features, we use the
DLBP descriptor. The DLBP is founded upon two
parts: the sign and the magnitude of the differences
between a pixel and its neighbors. Therefore, a pixel
p(x, y) is represented with two codes c
s
and c
m
. In or-
der to code the sign of the neighborhood, the original
LBP method is used: c
s
is obtained from neighbor-
hood pixels by generating binary values according to
the difference DD between the central pixel and each
neighbor pixel. Magnitude coding consists in assign-
ing each neighbor pixel a binary value according to a
threshold of absolute depth magnitude T
m
. The binary
sequence for c
m
is obtained in the same way as for the
sign. Fig. 2 gives an illustration of sign magnitude
coding with a radius R = 1, a neighborhood N = 8
and a magnitude threshold T
m
= 3. The magnitude
threshold is calculated automatically using the depth
gradient. For more details about the DLBP principle,
authors can refer to our previous work (Aissaoui et al.,
2014).
After LBP and DLBP calculation, local his-
tograms are then extracted from the LBP and DLBP
99
98
99
98
99
97
94
96
95
-1
-1
-5
-3
-4
-2
0
0
•
= !"#
•
$
= %&
0
1
0
0
0
0
0
1
0
0
0
1
1
1
0
0
DDs
Difference
Thresholding
Figure 2: Illustration of c
s
and c
m
coding for a given pixel.
maps generated from intensity and depth image. His-
tograms offer more invariance to geometric transla-
tions, and reduce the descriptor size and consequently
the processing time. That is why they are usually used
in LBP-based face recognition methods. In order to
preserve the spacial information, the map is divided
into different regions from which histograms are ex-
tracted and then concatenated to form the LBP and
the DLBP descriptor.
3.2 Bi-modal Recognition
After feature extraction, 2D and 3D modalities are
processed independently. A face is represented by
two vectors: LBP and DLBP histograms. An SVM
based training is performed for each modality in order
to obtain classifiers from both modalities. We choose
the SVM because it is a very powerful classification
method and a high accuracy was reported when using
SVM for face recognition (Byun and Lee, 2002).
In order to identify a new face, the decisions ob-
tained from the trained classifiers (from both modali-
ties) are fused in order to find the face identity. Fusion
at this stage is the most generally applicable strategy
in 2D+3D face recognition task and good precision
was reported using this fusion strategy. Moreover, in-
tensity and depth information have different nature.
The late fusion allows to perform different processing
to each modality. The decision fusion is performed
using the weighted majority vote (Xu et al., 1992).
This fusion rule is among the simplest and easiest to
implement but it allows us to investigate what using
both intensity and depth information brings to the so-
lution of face recognition.
4 EXPERIMENTS
In order to demonstrate the benefits from combin-
ing 2D and 3D modalities, we evaluate in this sec-
tion the proposed bi-modal approach on three 3D
face datasets: TEXAS (Gupta et al., 2010), FRGC
(Phillips et al., 2005) and BOSPHORUS (Savran
et al., 2008). The TEXAS 3D dataset consists of 1149
images of 118 persons. All faces are frontal with
different expressions and illumination changes. The
FRGC dataset contains 4007 images of 466 person
with frontal views, minor pose variations and major
Bi-modalFaceRecognition-Howcombining2Dand3DCluesCanIncreasethePrecision
561
0
20
40
60
80
100
1
2
3
4
5
6
7
8
Recognition rate (%)
R
Texas
LBP
3DLBP
DLBP
0
20
40
60
80
100
1
2
3
4
5
6
7
8
Recognition rate (%)
R
Bosphorus
LBP
3DLBP
DLBP
0
20
40
60
80
100
1
2
3
4
5
6
7
8
Recognition rate (%)
R
Frgc
LBP
3DLBP
DLBP
Figure 3: Comparison between LBP, 3DLBP, and DLBP for different radius values, for 3 collections.
expression and illumination variations. A number of
images is removed from this dataset since the depth
maps were unusable because of large holes due to
the scanner artifacts. The BOSPHORUS dataset in-
cludes 4666 images of 105 persons with different ex-
pressions and pose variations. Images with large pose
variations were not used from this dataset.
We have implemented the feature extraction pro-
cess using different parameters for LBP and DLBP.
Support Vector Machines (SVM) based on Radial Ba-
sis Function (RBF) kernels are used for classification.
The precision is evaluated with a 10-fold cross vali-
dation.
We have first calculated the precision (recogni-
tion rate) for LBP, 3DLBP, and DLBP on range im-
age. A 5× 5 grid is used when calculating local his-
tograms (i.e. 25 histograms per descriptor map). We
apply different radiuses (R ∈ [1, 8]) for each descrip-
tor for the three collections. We can see in Fig. 3
that 3DLBP and DLBP generally perform better than
LBP on range images which shows how important
it is to take into account the magnitude of the lo-
cal changes in range images. Besides, we also note
a general increase in the precision when the radius
is larger especially for DLBP, that successfully rep-
resent larger local patterns variations with more dis-
criminative codes.
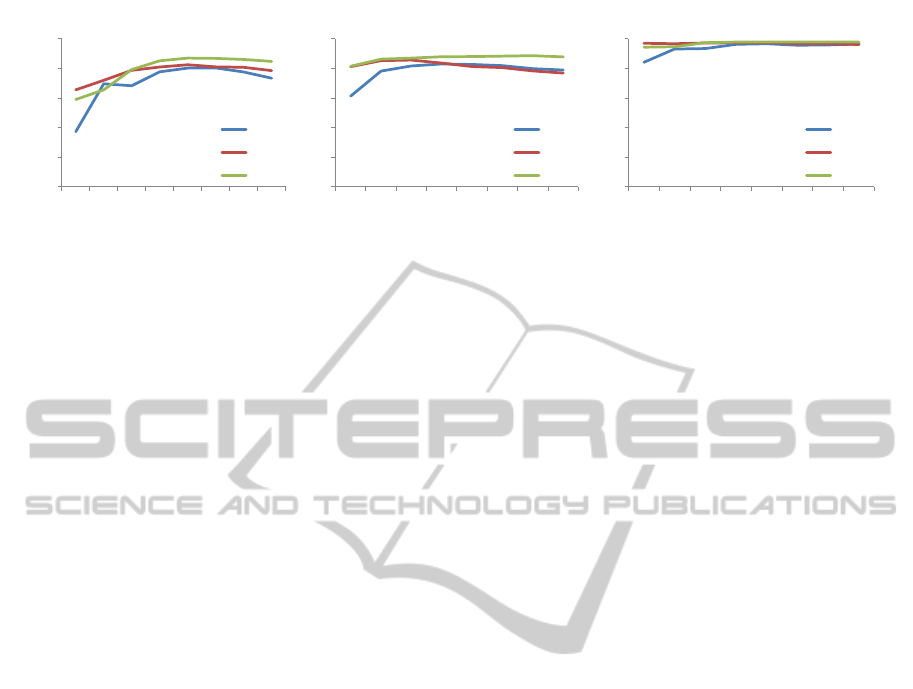
In Fig. 4, we report the recognition rates obtained
using 2D, 3D and bi-modal face recognition. The
recognition rate is calculated when varying the pa-
rameters values of both descriptors and the best rate
reached by each approach is then reported. Results
show two important points:
• In FRGC and Texas collections, the 3D recogni-
tion gives better precision then 2D recognition.
This is because the illumination variation in these
two collections is very high. Therefore, using
depth allows a robust discrimination and thus bet-
ter recognition rates are obtained. In BOSPHO-
RUS collection, there is no illumination variation
and the depth maps have a low quality (depth res-
olution). This is why 2D recognition yields better
results then 3D approach in this collection.
• The bi-modal approach gives the best precision,
specially in FRGC and TEXAS collections. This
shows how combining both modalities enhances
the precision of the mono-modal approaches. In
BOSPHORUS, the bi-modal approach is as pre-
cise as the 2D approach. This can be explained
by the fact that the improvement margin is very
small. Indeed, only with 2D modality, a recogni-
tion rate of 99, 35% is reached.
5 CONCLUSIONS
We have presented a novel approach for bi-modal face
recognition. It is based on two information sources:
the LBP descriptor captures the 2D texture informa-
tion, and the DLBP descriptor that represents the face
3D details. Our goal was to investigate how using
both modalities (2D and 3D) can enhance the recog-
nition precision. Experiments on different 3D face
collections were conducted in order to evaluate our
method. According to the obtained results, we can see
that, in general, the bi-modal approach is a potential
solution to face recognition in uncontrolled environ-
ment, allowing more precision and more robustness
through the complementarity of 2D and 3D modali-
ties.
Our future works are directed towards exploring
other fusion strategies. Indeed, fusion at decision
stage assume that modalities are independent. How-
ever, we can see that relative positions of face compo-
nents (eyes, nose, etc.) are the same in images of both
modalities. Moreover, 2D and 3D modalities might
be affected similarly by certain acquisition conditions
such as occlusion or pose variations. This shows that
depth and intensity images are likely to be somehow
dependent. This induces us to consider earlier fusion
and other combinations in our future works.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
562

84
86
88
90
92
94
96
98
100
Recognition rate (%)
Bosphorus
84
86
88
90
92
94
96
98
100
Recognition rate (%)
Frgc
84
86
88
90
92
94
96
98
100
Recognition rate (%)
Texas
3D approach 2D+3D bimodal approach 2D approach
Figure 4: Comparison between 2D face recognition (LBP) with greyscale images, 3D face recognition (DLBP) with range
images, and bi-modal recognition with a late-fusion, for 3 collections.
REFERENCES
Abate, A. F., Nappi, M., Riccio, D., and Sabatino, G.
(2007). 2D and 3D face recognition: A survey. Pat-
tern Recognition Letters, 28(14):1885 – 1906.
Aissaoui, A., Martinet, J., and Djeraba, C. (2014). Dlbp:
A novel descriptor for depth image based face recog-
nition. In Proceedings of the 21th IEEE international
conference on Image processing, pages 298–302.
Bowyer, K. W., Chang, K., and Flynn, P. (2006). A survey
of approaches and challenges in 3D and multi-modal
3D + 2D face recognition. Computer Vision and Image
Understanding, 101(1):1–15.
Byun, H. and Lee, S.-W. (2002). Applications of sup-
port vector machines for pattern recognition: A sur-
vey. In Proceedings of the First International Work-
shop on Pattern Recognition with Support Vector Ma-
chines, SVM ’02, pages 213–236, London, UK, UK.
Springer-Verlag.
Chang, K., Bowyer, K., and Flynn, P. (2003). Face recog-
nition using 2D and 3D facial data. In ACM Work-
shop on Multimodal User Authentication, pages 25–
32. Citeseer.
Fan, K.-C. and Hung, T.-Y. (2014). A novel local pattern
descriptor – local vector pattern in high-order deriva-
tive space for face recognition. IEEE Transactions on
Image Processing, 23(7):2877–2891.
Gupta, S., Castleman, K., Markey, M., and Bovik, A.
(2010). Texas 3D face recognition database. In Image
Analysis and Interpretation. IEEE Southwest Sympo-
sium on, pages 97–100. IEEE.
Huang, D., Ardabilian, M., Wang, Y., and Chen, L. (2009).
Asymmetric 3D/2D face recognition based on lbp fa-
cial representation and canonical correlation analysis.
In Proceedings of the 16th IEEE international con-
ference on Image processing, ICIP’09, pages 3289–
3292, Piscataway, NJ, USA. IEEE Press.
Huang, D., Shan, C., Ardabilian, M., Wang, Y., and Chen,
L. (2011). Local binary patterns and its application
to facial image analysis: A survey. IEEE Transactions
on Systems, Man, and Cybernetics, Part C, 41(6):765–
781.
Huang, Y., Wang, Y., and Tan, T. (2006). Combining statis-
tics of geometrical and correlative features for 3D face
recognition. In Proceedings of the British Machine Vi-
sion Conference, pages 879–888.
Hung, T.-Y. and Fan, K.-C. (2014). Local vector pattern in
high-order derivative space for face recognition. In
Proceedings of the 21th IEEE international confer-
ence on Image processing, pages 239–3243.
Husken, M., Brauckmann, M., Gehlen, S., and Von der
Malsburg, C. (2005). Strategies and benefits of fusion
of 2D and 3D face recognition. In Computer Vision
and Pattern Recognition-Workshops. IEEE Computer
Society Conference on, pages 174–174. IEEE.
Jahanbin, S., Choi, H., and Bovik, A. (2011). Passive mul-
timodal 2-d+3-d face recognition using gabor features
and landmark distances. Information Forensics and
Security, IEEE Transactions on, 6(4):1287–1304.
Mantecn, T., del Blanco, C., Jaureguizar, F., and Garca, N.
(2014). Dlbp: A novel descriptor for depth image
based face recognition. In Proceedings of the 21th
IEEE international conference on Image processing,
pages 293–297.
Ojala, T., Pietik¨ainen, M., and M¨aenp¨a¨a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans-
actions on Pattern Analysis and Machine Intelli-
gence., 24(7):971–987.
Ojala, T., Valkealahti, K., Oja, E., and Pietikinen, M.
(2001). Texture discrimination with multidimensional
distributions of signed gray-level differences. Pattern
Recognition, 34(3):727 – 739.
Phillips, P. J., Flynn, P. J., Scruggs, T., Bowyer, K. W.,
Chang, J., Hoffman, K., Marques, J., Min, J., and
Worek, W. (2005). Overview of the face recogni-
tion grand challenge. In Computer vision and pat-
tern recognition. IEEE computer society conference
on, volume 1, pages 947–954. IEEE.
Phillips, P. J., Moon, H., Rizvi, S. A., and Rauss, P. J.
(2000). The feret evaluation methodology for face-
Bi-modalFaceRecognition-Howcombining2Dand3DCluesCanIncreasethePrecision
563

recognition algorithms. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 22(10):1090–
1104.
Savran, A., Aly¨uz, N., Dibeklio˘glu, H., C¸eliktutan, O.,
G¨okberk, B., Sankur, B., and Akarun, L. (2008).
Bosphorus database for 3D face analysis. In Biomet-
rics and Identity Management, pages 47–56. Springer.
Xu, C., Li, S., Tan, T., and Quan, L. (2009). Automatic
3D face recognition from depth and intensity gabor
features. Pattern Recognition, 42(9):1895 – 1905.
Xu, L., Krzyzak, A., and Suen, C. (1992). Methods of
combining multiple classifiers and their applications
to handwriting recognition. Systems, Man and Cyber-
netics, IEEE Transactions on, 22(3):418–435.
Zhang, B., Gao, Y., Zhao, S., and Liu, J. (2010). Local
derivative pattern versus local binary pattern: Face
recognition with high-order local pattern descriptor.
Trans. Img. Proc., 19(2):533–544.
Zhao, W., Chellappa, R., Phillips, P. J., and Rosenfeld, A.
(2003). Face recognition: A literature survey. Acm
Computing Surveys, 35(4):399–458.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
564
