
Lightweight Computer Vision Methods
for Traffic Flow Monitoring on Low Power Embedded Sensors
Massimo Magrini, Davide Moroni, Gabriele Pieri and Ovidio Salvetti
SILab, Institute of Information Science and Technologies - CNR, Via G. Moruzzi 1, 56124, Pisa, Italy
Keywords: Real-time Imaging, Embedded Systems, Intelligent Transport Systems (ITS).
Abstract: Nowadays pervasive monitoring of traffic flows in urban environment is a topic of great relevance, since the
information it is possible to gather may be exploited for a more efficient and sustainable mobility. In this
paper, we address the use of smart cameras for assessing the level of service of roads and early detect
possible congestion. In particular, we devise a lightweight method that is suitable for use on low power and
low cost sensors, resulting in a scalable and sustainable approach to flow monitoring over large areas. We
also present the current prototype of an ad hoc device we designed and report experimental results obtained
during a field test.
1 INTRODUCTION
Thanks to computer vision techniques, fully
automatic video and image analysis from traffic
monitoring cameras is a fast-emerging field based
with a growing impact on Intelligent Transport
Systems (ITS).
Indeed the decreasing hardware cost and,
therefore, the increasing deployment of cameras and
embedded systems have opened a wide application
field for video analytics in both urban and highway
scenarios. It can be envisaged that several
monitoring objectives such as congestion, traffic rule
violation, and vehicle interaction can be targeted
using cameras that were typically originally installed
for human operators (Buch et al., 2011).
On highways, systems for the detection and
classification of vehicles have successfully been
using classical visual surveillance techniques such as
background estimation and motion tracking for some
time. Nowadays existing methodologies have good
performance also in case of inclement weather and
are operational 24/7. On the converse, the urban
domain is less explored and more challenging with
respect to traffic density, lower camera angles that
lead to a high degree of occlusion and the greater
variety of street users. Methods from object
categorization and 3-D modelling have inspired
more advanced techniques to tackle these
challenges. In addition, due to scalability issues and
cost-effectiveness, urban traffic monitoring cannot
be constantly based on high-end acquisition and
computing platforms; the emerging of embedded
technologies and pervasive computing may alleviate
this issue: it is indeed challenging yet definitely
important to deploy pervasive and untethered
technologies such as Wireless Sensor Networks
(WSN) for addressing urban traffic monitoring.
Based on these considerations, the aim of this
paper is to introduce a scalable technology for
supporting ITS-related problems in urban scenarios;
in particular, we propose an embedded solution for
the realization of a smart camera that can be used to
detect, understand and analyse traffic-related
situation and events thanks to an on-board vision
logics. Indeed, to suitably tackle scalability issues in
the urban environment, we propose the use of a
distributed, pervasive system consisting in a Smart
Camera Network (SCN), a special kind of WSN in
which each node is equipped with an image-sensing
device. Clearly, gathering information from a
network of scattered cameras, possibly covering a
large area, is a common feature of many video
surveillance and ambient intelligence systems.
However, most of classical solutions are based on a
centralized approach: only sensing is distributed
while the actual video processing is accomplished in
a single unit. In those configurations, the video
streams from multiple cameras are encoded and
conveyed (sometimes thanks to multiplexing
technologies) to a central processing unit, which
663
Magrini M., Moroni D., Pieri G. and Salvetti O..
Lightweight Computer Vision Methods for Traffic Flow Monitoring on Low Power Embedded Sensors.
DOI: 10.5220/0005361006630670
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (MMS-ER3D-2015), pages 663-670
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

decodes the streams and perform processing on each
of them. With respect to those configurations, the
need to introduce distributed intelligent system is
motivated by several requirements, namely
(Remagnino et al., 2004):
• Speed: in-network distributed processing is
inherently parallel; in addition, the specialization of
modules permits to reduce the computational burden
in the higher level of the network, in this way, the
role of the central server is relieved and it might be
actually omitted in a fully distributed architecture.
• Bandwidth: in-node processing permits to
reduce the amount of transmitted data, by
transferring only information-rich parameters about
the observed scene and not the redundant video data
stream.
• Redundancy: a distributed system may be re-
configured in case of failure of some of it
components, still keeping the overall functionalities.
• Autonomy: each of the nodes may process the
images asynchronously and may react autonomously
to the perceived changes in the scene.
In particular, these issues suggest moving a part
of intelligence towards the camera nodes. In these
nodes, artificial intelligence and computer vision
algorithms are able to provide autonomy and
adaptation to internal conditions (e.g. hardware and
software failure) as well as to external conditions
(e.g. changes in weather and lighting conditions). It
can be stated that in a SCN the nodes are not merely
collectors of information from the sensors, but they
have to blend significant and compact descriptors of
the scene from the bulky raw data contained in a
video stream.
This naturally requires the solution of computer
vision problems such as change detection in image
sequences, object detection, object recognition,
tracking, and image fusion for multi-view analysis.
Indeed, no understanding of a scene may be
accomplished without dealing with some of the
above tasks. As it is well known, for each of such
problems there is an extensive corpus of already
implemented methods provided by the computer
vision and the video surveillance communities.
However, most of the techniques currently available
are not suitable to be used in SCN, due to the high
computational complexity of algorithms or to
excessively demanding memory requirements.
Therefore, ad hoc algorithms should be designed for
SCN, as we will explore in the next sections. In
particular, after describing the possible role of SCN
in urban scenarios, we present in Section 3 a sample
application, namely the estimation of vehicular
flows on a road, proposing a lightweight method
suitable for embedded systems. Then, we introduce
the sensor prototype we designed and developed in
Section 4. In Section 5 we report the experimental
results gathered during a test field and we finally
conclude the paper in Section 6.
2 SCN IN URBAN SCENARIOS
According to (Buch et al., 2011), there has been an
increased scope for the automatic analysis of urban
traffic activity. This is partially due to the additional
numbers of cameras and other sensors, enhanced
infrastructure and consequent accessibility of data.
In addition, the advances in analytical techniques for
processing video streams together with increased
computing power have enabled new applications in
ITS. Indeed, video cameras have been deployed for
a long time for traffic and other monitoring
purposes, because they provide a rich information
source for human understanding. Video analytics
may now provide added value to cameras by
automatically extracting relevant information. This
way, computer vision and video analytics become
increasingly important for ITS.
In highway traffic scenarios, the use of cameras
is now widespread and existing commercial systems
have excellent performance. Cameras are used
tethered to ad hoc infrastructures, sometimes
together with Variable Message Signs (VMS), RSU
and other devices typical of the ITS domain. Traffic
analysis is often performed remotely by using
special broadband connection, encoding,
multiplexing and transmission protocols to send the
data to a central control room where dedicated
powerful hardware technologies are used to process
multiple incoming video streams (Lopes et al.,
2010). The usual monitoring scenario consists in the
estimation of traffic flows distinguished among
lanes and vehicles typologies together with more
advanced analysis such as detection of stopped
vehicles, accidents and other anomalous events for
safety, security and law enforcement purposes.
By converse, traffic analysis in the urban
environment appears to be much more challenging
than on highways. In addition, several extra
monitoring objectives can be supported, at least in
principle, by the application of computer vision and
pattern recognition techniques. For example these
include the detection of complex traffic violations
(e.g. illegal turns, one-way streets, restricted lanes)
(Guo et al., 2011; Wang et al. 2013), identification
of road users (e.g. vehicles, motorbikes and
pedestrians) (Buch et al., 2010) and of their
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
664

interactions understood as spatiotemporal
relationships between people and vehicle or vehicle-
to-vehicle (Candamo et al., 2010). For these reasons,
it is worthwhile to apply the wireless sensor network
approach to the urban scenario.
Generally, we may identify four different scopes that
can be targeted thanks to video-surveillance based
systems, namely i) safety and security, ii) law
enforcement, iii) billing and iv) traffic monitoring
and management. Although in this chapter we focus
mostly on the latter, we give a brief overview of
each of them.
Safety and security relate to the prevention and
prompt notification both of proper traffic events and
of roadside events typical of urban environment.
Law enforcement is based on the detection of
unlawful acts and to their documentation for
allowing the emission of a fine. Besides well-known
and established technologies e.g. for streetlight
violations, vision based systems might allow for
identification of more complex behaviour e.g. illegal
turns or trespassing on a High Occupancy Vehicle
(HOV) lane. Documentation of unlawful acts is
usually performed by acquiring a number of images
sufficient for representing the violation, combined
with automatic number plate recognition (ANPR)
for identifying the offender vehicle. ANPR is also a
common component of video-based billing and
tolling. In addition, in this case there are a number of
established technologies provided as commercial
solutions by many vendors (Digital Recognition,
2014). A peculiarity of urban billing systems with
respect to highways is the non-intrusiveness
requirement: it is not possible to alter the normal
vehicular flow but a free-flow tolling must be
implemented. Technologies satisfying this
requirement are already available and used in cities
such as London, Stockholm and Singapore but their
actual cost prevents their massive deployment in
medium-size or low-resource cities. Nevertheless,
the availability of such billing technologies at a
lower cost may pave the way to the collection of
fine-grained data analytics of vehicular flows, road
usage and congestions, allowing for the
implementation of adaptive Travel Demand
Management (TDM) policies aimed at a more
sustainable, effective and socially acceptable
mobility applied to urban and metropolitan contexts.
Finally, traffic monitoring and management is
related to extraction information from urban
observed scenes that might be beneficial in several
contexts. For instance, real-time vehicle counting
might be used to assess level of service on a road
and detecting possible congestions. Such real-time
information might then be used for traffic routing;
either by providing directly suggestion to user (e.g.
by VMS) of by letting a trip planner deploys these
data to search for an optimal path. Finally, statistics
on vehicular flows may be used to understand
mobility patterns and help stakeholders to improve
urban mobility. Usually, vehicle count is performed
by inductive loops, which provide precise
measurements and some vehicle classification. The
major drawback of inductive loops is that they are
very intrusive in the road surface and therefore
require a rather long and expensive installation
procedure. Furthermore, maintenance also requires
intervention on the road pavement and therefore is
not sustainable in most urban scenarios. Radar-based
sensing systems are also used for vehicle counting
and simple analytics but in cases of congestions,
they generally exhibit deteriorated performance. In
the last years there has been interest in video-based
counting system based on imaging devices, also
embedded. Some solutions, such as (Traficam,
2014), are commercially available and provide
vehicle count in several lanes at an intersection. A
version of Traficam working in the infrared
spectrum is also available. Besides vehicle counting,
traffic management can include the extraction of
other flow parameters, e.g. discriminating the
components of flow generated by different vehicle
classes (car, track, buses, bike and motorbikes) and
assessing the transit speed of each detected vehicle.
From this brief survey of urban scenario
applications, we might argue that pervasive
technologies based on vision turn out to be of
interest when i) there is some semantics to be
understood that cannot be acquired solely on the
basis of scalar sensors, ii) there is no possibility or
no sufficient revenue in actuating installation of
tethered technologies, such as intrusive sensor or
high-end devices and iii) there is the need of a
scalable architecture, capable of covering a
metropolitan area. Since computer vision is not
application specific, an additional feature of a SCN
is represented by the fact that it can be re-adapted to
the changing urban environment and reconfigured
even for supporting new scene understanding tasks
by just updating the vision logics hosted in each
sensor. On the converse, scalar sensors (like
inductive loops) and specific sensors like radar have
no flexibility in providing information different form
the one they were built for.
LightweightComputerVisionMethodsforTrafficFlowMonitoringonLowPowerEmbeddedSensors
665

3 TRAFFIC FLOW ANALYSIS
In this Section, a sample ITS applications based on
computer vision over SCN is reported. It regards the
estimation of vehicular flows and is based on a
lightweight computer vision pipeline that is
dissimilar form the conventional one used on
standard architectures.
More precisely, the analysis of traffic status and
the estimation of level of service are usually
obtained by extracting information on the vehicular
flows in terms of passed vehicles, their speed and
typology. Conventional pipelines start with i)
background subtraction and move forward to ii)
vehicle detection, iii) vehicle classification, iv)
vehicle tracking and v) final data extraction. On
SCN, instead, it is convenient to adopt a lightweight
approach; in particular, data only in Region of
Interest (RoI) is processed, where the presence of a
vehicle is detected. On the basis of these detections,
then, flow information is derived without making
explicit use of classical tracking algorithms.
3.1 Background Subtraction
More in detail, background subtraction is performed
only on small quadrangular RoIs. Such shape is
sufficient for modelling physical rectangles under
perspective skew. In this way, when low vision
angles are available (as common in urban scenarios),
it is possible to deal with a skewed scene even
without performing direct image rectification, which
can be computationally intensive on an embedded
sensor. The quadrangular RoI can be used to model
lines on the image (i.e. a 1 pixel thick line) either.
On such RoI, lightweight detection methods are
used to classify a pixel as changed (in which case it
is assigned to the foreground) or unchanged (in
which case it is deemed to belong to the
background). Such decision is obtained by
modelling the background. Several approaches are
feasible. The simplest one is represented by
straightforward frame differencing. In this approach,
the frame before the one that is being processed is
taken as background. A pixel is considered changed
if the frame difference value is bigger than a
threshold. Frame differencing is one of the fastest
methods but has some cons in ITS applications; for
instance, a pixel is considered changed two times:
first when a vehicle enters and, second, when it exits
from the pixel area. In addition, if a vehicle is
homogeneous and it is imaged in more than one
frame, it might be not detected in the frames after
the first. Another approach is given by static
background. In this approach, the background is
taken as a fixed image without vehicles, possibly
normalized to factor illumination changes. Due to
weather, shadow, and light changes the background
should be updated to yield meaningful results in
outdoor environments. However strategies for
background update might be complex; indeed it
should be guaranteed that the scene is without
vehicles when updating. To overcome these issues,
algorithms featuring adaptive background are used.
Indeed this class of algorithms is the most robust for
use in uncontrolled outdoor scenes. The background
is constantly updated fusing the old background
model and the new observed image. There are
several ways of obtaining adaptation, with different
levels of computational complexity. The simplest is
to use an average image. In this method, the
background is modelled as the average of the frames
in a time window. Online computation of the
average is performed. Then a pixel is considered
changed if it is different more than a threshold from
the corresponding pixel in the average image. The
threshold is uniform on all the pixels. Instead of
modelling just the average, it is possible to include
the standard deviation of pixel intensities, thus using
a statistic model of the background as a single
Gaussian distribution. In this case, both the average
and standard deviation images are computed by an
online method on the basis of the frames already
observed. In this way, instead of using a uniform
threshold on the difference image, a constant
threshold is used on the probability that the observed
pixel is a sample drawn from the background
distribution, which is modelled pixel by pixel as a
Gaussian. Gaussian Mixture Models (GMM) are a
generalization of the previous method. Instead of
modelling each pixel in the background image as a
Gaussian, a mixture of Gaussians is used. The
number k of Gaussians in the mixture is a fixed
parameter of the algorithm. When one of the
Gaussian has a marginal contribution to the overall
probability density function, it is disregarded and a
new Gaussian is instantiated. GMM are known to be
able to model changing background even in cases
where there are phenomena such as trembling
shadows and tree foliage (Stauffer and Grimson,
1999). Indeed, in those cases pixels clearly exhibit a
multimodal distribution. However, GMM are
computationally more intensive than a single
Gaussian. Codebooks (Kim et al., 2004) are another
adaptive background modelling techniques
presenting computational advantages for real-time
background modelling with respect to GMM. In this
method, sample background values at each pixel are
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
666
quantized into codebooks, which represent a
compressed form of background model for a long
image sequence. That allows to capture even
complex structural background variation (e.g. due to
shadows and trembling foliage) over a long period
of time under limited memory.
Several ad hoc procedures can be envisaged
starting with the methods just described. In
particular, one important issue concerns the policy
by which the background is updated or not. In
particular, if a pixel is labelled as foreground in
some frame, we might want that this pixel does not
contribute in updating the background or that it
contributes to a lesser extent. Similarly, if we are
dealing with a RoI, we might want to fully update
the background only if no change has been detected
in the RoI; if a change has been detected instead, we
may decide not to update any pixel in the
background.
3.2 Transit Detection
The transit detection procedure starts taking in input
one or more RoIs for each lane suitably segmented
in foreground/background by the aforementioned
methods. When processing the frame acquired at
time t, the algorithm decides if a vehicle occupies
the RoI R
k
or not. The decision is based on the ratio
of pixels changed with respect to the total number of
pixels in R
k
, i.e.:
a
k
(t)=#(changed pixels in R
k
)/ #(pixels in R
k
)(1)
Then a
k
(t) is compared to a threshold
in order to
evaluate if a vehicle was effectively passing on R
k
. If
a
k
(t) >
and at time t-1 no vehicle was detected, then
a new transit event is generated. If a vehicle was
already detected instead at time t-1, no new event is
generated but the time length of the last created
event is incremented by one frame. When finally at a
time t+k no vehicle is detected (i.e. a
k
(t) <
) , the
transit event is declared as accomplished and no
further updated. Assuming that the vehicle speed is
uniform during the detection time, the number of
frames k in which the vehicle has been observed is
proportional to the vehicle length and inversely
proportional to its speed. In the same way, it is
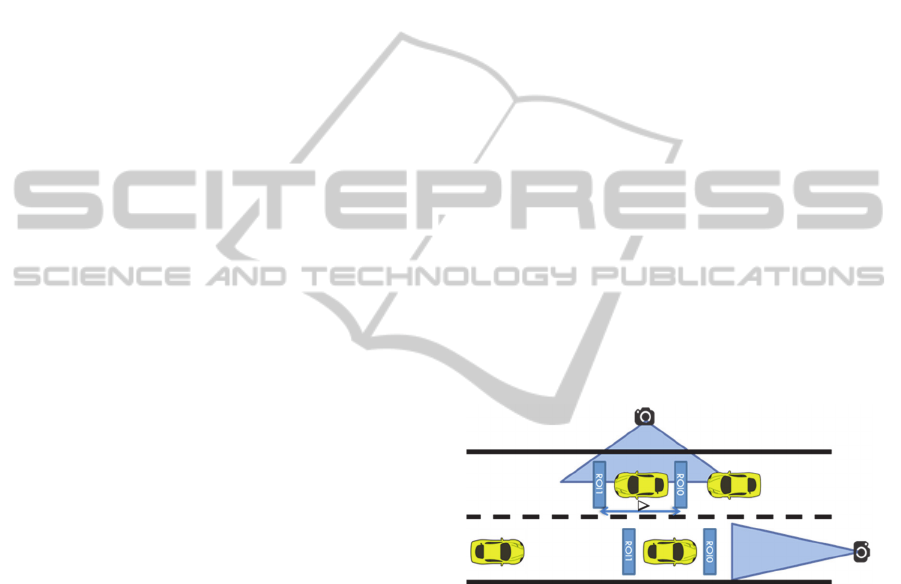
possible to use two RoIs R
0
and R
1,
lying on the
same lane but translated by a distance , to estimate
the vehicle speed. See Figure 1.1. Indeed, if there is
a delay of frames, the vehicle speed can be
estimated as v=/(*) where is the frame rate.
The vehicle length can in turn be estimated as l=k/v.
Clearly, the quality of these estimates varies greatly
with respect to several factors, and is in particular
due to a) frame rate and b) finite length of RoIS.
Indeed, the frame rate generates a quantization error,
which leads to the estimation of the speed range;
therefore, the approach cannot be used to compute
the instantaneous speed. For what regards b), an
ideal detection area is represented by a detection line
having length equal to zero. Otherwise, a
localization error affects any detection, i.e. it is not
know exactly where the vehicle is inside the RoI at
detection time. The use of a 1-pixel thick RoIs
alleviates the problem but it results in less robust
detections. This problem introduces some issues
both in vehicle length and speed computations,
because in both formulas we use the nominal
distance and not the precise (and unknown)
distance between the detections. This is the
drawback in not using a proper tracking algorithm in
the pipeline, which would require however
computational resources not usually available on
embedded devices. Nevertheless, it is possible to
provide a speed and size class for each vehicle. For
each speed and vehicle class a counter is used to
accumulate the number of detections. Temporal
analysis on the counter is sufficient for estimating
traffic typologies, average speed and analysing the
level of service of the road, early identifying
possible congestions.
Figure 1: RoI configuration for traffic flow analysis.
4 SENSOR PROTOTYPE
In this section the design and development of a
sensor node prototype based on SCN concepts is
presented. This prototype is particularly suited for
urban application scenarios. In particular, the
prototype is a sensor node having enough
computational power to accomplish the computer
vision task envisaged for urban scenarios as
described in the previous section. For the design of
the prototype an important issue to follow has been
the use of low cost technologies. The node is using
sensors and electronic components at low cost, so
that once engineered, the device can be
manufactured at low cost in large quantities. The
LightweightComputerVisionMethodsforTrafficFlowMonitoringonLowPowerEmbeddedSensors
667
single sensor node has a main board that manages
both the vision tasks and the networking tasks thanks
to an integrated wireless communication module
(RF Transceiver).
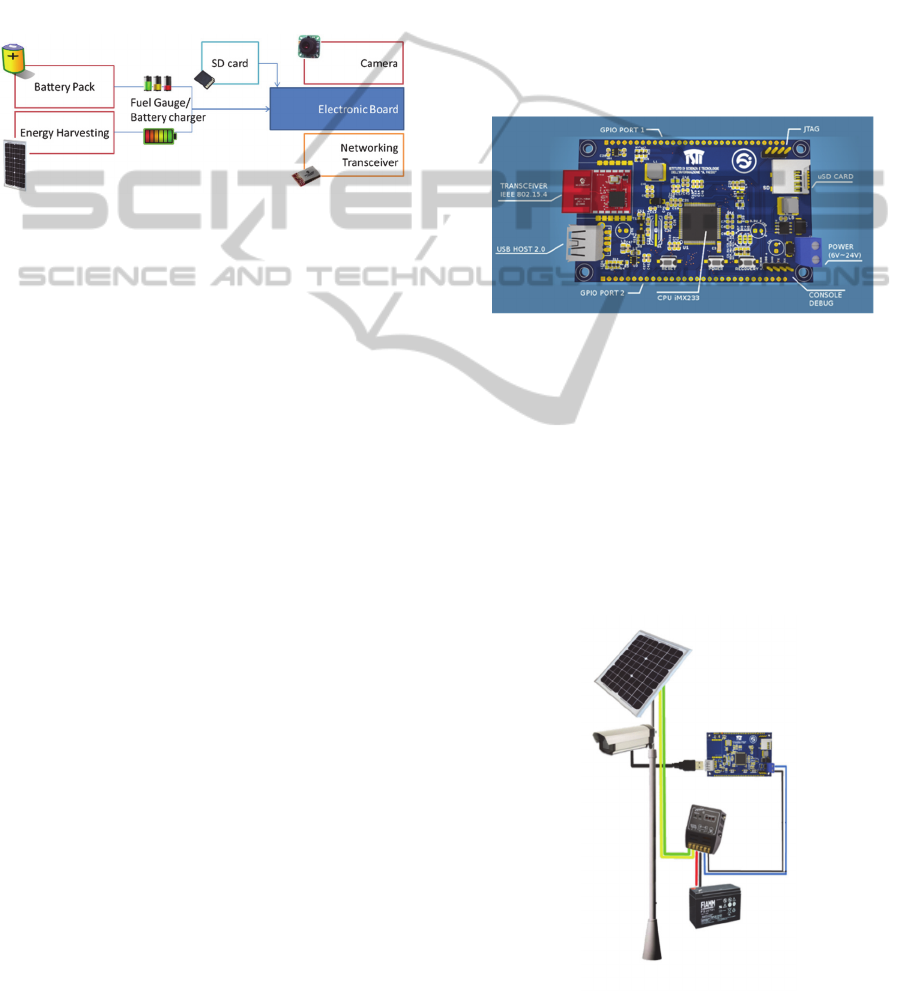
Other components of the sensor node are given
by the power supply system that controls charging
and permits to choose optimal energy savings
policies. The power supply system includes the
battery pack and a module for harvesting energy,
e.g. through photovoltaic panel. See Figure 2:
Architecture of the sensor node
.
Figure 2: Architecture of the sensor node.
4.1 The Main Board
For the realization of the vision board, an embedded
Linux architecture has been selected in the design
stage for providing enough computational power and
ease of programming. A selection of ready-made
Linux based prototyping boards has been evaluated
with respect to computing power,
flexibility/expandability, price/performance ratio
and support. They were all find to have as common
disadvantages high power consumption and the
presence of electronic parts which are not useful for
the tasks of a smart camera node.
It has been therefore decided to design and
realize a custom vision component by designing,
printing and producing a new PCB. The new PCB
(see Figure 3) was designed in order to have the
maximum flexibility of use while maximizing the
performance/consumption ratio. A good compromise
has been achieved by using a Freescale CPU based
on the ARM architecture, with support for MMU -
like operating systems GNU/Linux.
This architecture has the advantage of integrating
a Power Management Unit (PMU), in addition to
numerous peripherals interface, thus minimizing the
complexity of the board. In addition, the CPU
package of type TQFP128 helped us minimize the
layout complexity, since it was not necessary to use
multilayer PCB technologies for routing. Thus, the
board can be printed also in a small number of
instances. The choice has contributed to the further
benefit of reducing development costs, in fact, the
CPU only needs an external SDRAM, a 24MHz
quartz oscillator and an inductance for the PMU.
It has an average consumption, measured at the
highest speed (454MHz), of less than 500mW.
The board has several communication interfaces
including RS232 serial port for communication with
the networking board, SPI, I2C and USB
For radio communication, a transceiver
compliant with IEEE 802.15.4 has been integrated in
line with modern approaches to IoT. A suitable glue
has been used to integrate the transceiver with the
IPv6 stack, also containing the 6LoWPAN header
compression and adaptation layer for IEEE 802.15.4
links. Therefore, the operating system is well
capable of supporting ETSI M2M communications
over the SCN.
Figure 3. Design of the PCB and main features.
4.2 Sensor, Energy Harvesting and
Housing
For the integration of a camera sensor on the vision
board, some specific requirements were defined in
the design stage for providing easiness of connection
and to the board itself and management through it,
and capability to have at least a minimal
performance in difficult visibility condition, i.e.
night vision. Thus, the minimal constraints were to
Figure 4: General setup of a single node.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
668
be compliant with USB Video Class device (UVC)
and the possibility to remove IR filter or capability
of Near-IR acquisition. Moreover, the selection of a
low cost device was an implicit requirement
considered for the whole sensor node prototype.
The previously described boards and camera are
housed into an IP66 shield. Another important
component of the node is the power supply and
energy harvesting system that controls charging and
permits to choose optimal energy savings policies.
The power supply system includes the lead (Pb) acid
battery pack and a module for harvesting energy
through photovoltaic panel.
In Figure 4, the general setup of a single node
with the electric connections for the involved
components is shown.
5 EXPERIMENTAL RESULTS
For the traffic flow, the set-up consists in a small set
of SCN nodes, which are in charge of observing and
estimating dynamic real-time traffic related
information, in particular regarding traffic flow and
the number and direction of the vehicles, as well as
giving a rough estimate about the average speed of
the cars in the traffic flow.
Two versions of the algorithm were
implemented. In the first, the solutions uses frame
differencing as a background subtraction method,
obtaining a binary representation of the moving
objects in the RoI frame. In the second, an adaptive
background modelling based on Gaussian
distribution has been employed using a weighted
mixture of previous backgrounds. This means that
previous backgrounds are used with a heavier weight
in case of no-event occurring (i.e. no transit of car),
while they are used with light or no-weight in case
there is an event of transit occurring.
Test sequences have been acquired under real
traffic conditions and then used for testing both
algorithms. The ground-truth total for these
sequences was the following:
- 124 vehicles transited,
having the following length estimation subdivision:
- 11 with length between 0 and 2 metres
- 98 (between 2 and 5 metres)
- 15 (5 and more metres)
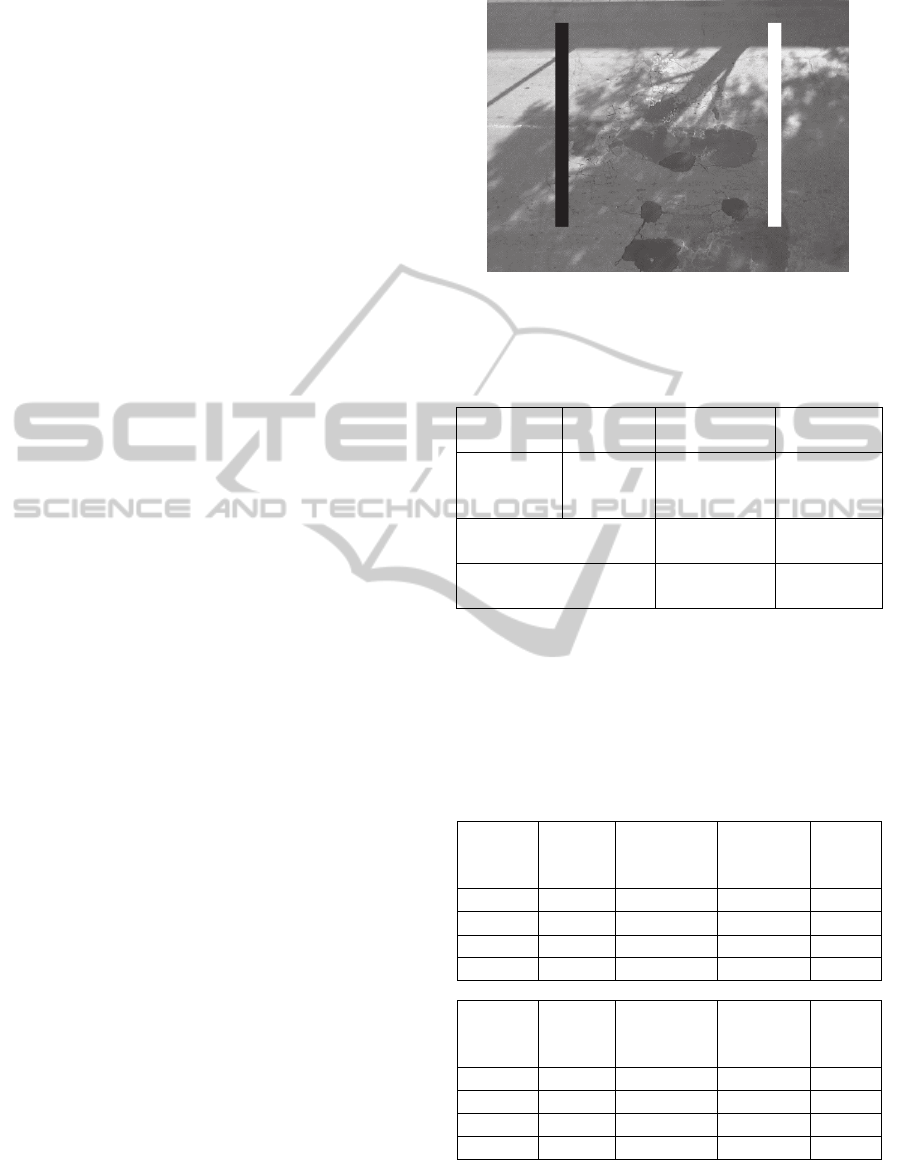
In the following figure a view from the sensor on
the testing scenario is shown.
Moreover, the algorithms yield a speed class
estimate, but for this type of data there is no ground
truth available.
Figure 5. Sample of frame from one of the test sequences
(in black and white are shown the RoIs).
The total classification results are shown in the
following table:
Ground-
truth
Alg.1
Frame diff.
Alg.2
Adaptive
Total
transited
vehicles
124 140 121
Correctly identified
vehicles
124
(100%)
118
(95.2%)
False positive
16
(12.9%)
3
(2.4%)
The first algorithm based on frame differencing has
a significant number of false positives but it reaches
a 100% identification rate, while the second adaptive
algorithm has an acceptable rate of identification
with a very low false positive rate. As a further step,
in the following two tables are shown the
classification estimates for the speeds and lengths
classes for each of the implemented algorithms.
Algo 1
Frame
Diff.
Speed
<20
Km/h
Sp. Betw.
20-35
Km/h
Speed
>35
Km/h
TOT
L. 0-2 m. 10 8 2 20
L. 2-5 m. 29 27 8 64
L. 5+ m. 0 10 46 56
TOT 39 45 56 140
Algo 2
Adaptive
Speed
<20
Km/h
Sp. Betw.
20-35
Km/h
Speed
>35
Km/h
TOT
L. 0-2 m. 25 1 1 27
L. 2-5 m. 27 35 3 65
L. 5+ m. 8 15 6 29
TOT 60 51 10 121
For a correct evaluation of these tables, it has to be
taken into account the fact that length estimates were
made roughly by an observer by sight, while there is
LightweightComputerVisionMethodsforTrafficFlowMonitoringonLowPowerEmbeddedSensors
669

no estimate at all on the ground truth regarding the
speeds. Furthermore, for the first algorithm all the
false positive were detected in the class of length 5
or more metres with fastest speed, and have been
identified as bugs related to the camera and its
automatic setting of balance and contrast. All these
issues and deeper analysis are under studying and
will provide more detailed results.
6 CONCLUSIONS
In this paper, we have presented technologies based
on computer vision for supporting urban mobility,
envisaging a number of applications of interest.
Then, as a sample, we introduced a specially-
designed lightweight pipeline for traffic flow
analysis that is suitable for embedded system with
constrained memory and computational power. Such
method has been tested on a prototype sensor we
designed and developed and whose main features are
also reported in this paper. The sensor, being low
cost and equipped with a wireless transceiver, is a
very good candidate for becoming the key ingredient
of a scalable and pervasive smart camera network
for the urban environment. Its good functionalities
are proved by the set of experimental results that
were collected on the field in realistic conditions. In
the future, besides refining the procedure for vehicle
characterization in term of speed and size, we plan
to extend the class of vision logics to address further
applications to mobility.
ACKNOWLEDGEMENTS
This work has been partially supported by POR
CReO 2007-2013 Tuscany Project “SIMPLE” –
Sicurezza ferroviaria e Infrastruttura per la Mobilità
applicate ai Passaggi a LivEllo, EU FP7 “ICSI” –
Intelligent Cooperative Sensing for Improved traffic
efficiency and EU CIP “MobiWallet” – Mobility and
Transport Digital Wallet.
REFERENCES
Buch; Orwel ; Velastin, 2010. Urban road user detection
and classification using 3D wire frame models IET
Computer Vision, Volume 4, Issue 2, p. 105 – 116.
Buch N., S.A. Velastin and J. Orwell, 2011. A review of
computer vision techniques for the analysis of urban
traffic. IEEE Trans. ITS, Vol. 12, N°3, pp. 920-939.
Candamo, Shreve, Goldgof, Sapper, Kastur, 2010.
Understanding transit scenes: A survey on human
behavior-recognition algorithms, IEEE Trans. ITS,
vol. 11, no. 1, pp.206 -224.
Digital Recognition, 2014. Available at:
http://www.digital-recognition.com/ (Last retrieved
October 28, 2014).
Guo, Wang, B. Yu, Zhao, X. Yuan, 2011. TripVista:
Triple Perspective Visual Trajectory Analytics and Its
Application on Microscopic Traffic Data at a Road
Intersection. PacificVis, 2011 IEEE: 163-170.
Kim K., Chalidabhongse T., Harwood D. and Davis L.,
2004. Background modeling and subtraction by
codebook construction, IEEE ICIP, 2004, pp. 2-5.
Lopes J., J. Bento, E. Huang, C. Antoniou and M. Ben-
Akiv, 2010. Traffic and mobility data collection for
real-time applications, IEEE Conf. ITSC, pp.216 -223.
Magrini M., Moroni D., Pieri G., Salvetti O, 2012. Real
time image analysis for infomobility. Lecture Notes in
Computer Science, vol. 7252, 207 – 218, 2012.
Remagnino P., A. I. Shihab, and G. A. Jones, 2004.
Distributed intelligence for multi-camera visual
surveillance. Pattern Recognition, 37(4):675–689.
Stauffer C. and Grimson W.E., 1999. Adaptive
background mixture models for real-time tracking,
Proc. CVPR Fort Collins, CO, USA: 1999, pp. 2: 246-
252.
Traficam, 2014. Available at: http://www.traficam.com/
(Last retrieved October 28, 2014).
Wang; Min Lu; X. Yuan; J. Zhang; Van De Wetering, H.,
2013. Visual Traffic Jam Analysis Based on
Trajectory Data, Visualization and Computer
Graphics, IEEE Transactions on, On page(s): 2159 -
2168 Volume: 19, Issue: 12.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
670
