
Time-to-Contact in Scattering Media
Wooseong Jeong, Laksmita Rahadianti, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Gokiso, Showa, Nagoya, 466-8555, Japan
Keywords:
Time-to-Contact, Scattering Media, Single Scattering.
Abstract:
In this paper, we propose a method for estimating time-to-contact in scattering media, such as fog. Images
taken in the scattering media are unclear, and thus, we cannot detect appropriate geometric information from
images for computing 3D information. In this paper, we consider not geometric information but photometric
information such as observed intensity. In our method, we can eliminate the effect of scattering media and
estimate the time-to-contact toward objects without any prior knowledge.
1 INTRODUCTION
Recently, computer vision techniques are widely used
for video surveillance, object recognition and many
other applications. In particular, 3D distance mea-
surement is one of the most important problems in
the field of computer vision.
When we measure 3D distance by using a stereo
camera system, a set of image correspondences are re-
quired. In ordinary case, image features points are ex-
tracted by using feature point detectors, such as SIFT
and SURF, and then 3D distance is estimated from the
extracted points. Although the stereo method works
well if we have proper images as shown in Fig.1 (a),
it does not work well when the input images are un-
suitable for feature point detection. For example, if
there is fog or smoke in the input scene as shown in
Fig.1 (b), the feature points may not be extracted suf-
ficiently and accurately. This is because the light rays
reflected from the object surface are scattered by mi-
cro particles as shown in Fig.5. In this case we cannot
obtain original colors, feature points and much other
visual information properly. These kinds of media,
which scatter light rays such as fog and smoke, are
called as scattering media.
In the scattering media, many existing compute vi-
sion techniques do not work well. In order to avoid
this problem, many methods which eliminate the
effect of scattering media are proposed (Schechner
et al., 2001; Namer and Schechner, 2006; Kopf et al.,
2008; Narasimhan and Nayar, 2003a; Narasimhan
and Nayer, 2001; Narasimhan and Nayar, 2003b; Fat-
tal, 2008; He et al., 2011; Tarel and Hautiere, 2009;
Narasimhan et al., 2005). In these methods, the scat-
tering media is considered as obstacles for observing
proper images, and the effect of the scattering media
is eliminated. One of the most popular techniques for
eliminating the effect of scattered media is to control
the light(Narasimhan et al., 2005). In this method,
a controllable light source, such as projector is used
for eliminating the effect of scattering media. By us-
ing the method, we can separate observed intensity
into a direct component which does not include the
effect of scattering media, and an indirect component
which is generated by the scattering media. Although
their method is useful, it requires a controllable light
source, and thus it cannot be used in the ordinary light
source environment.
In this paper, we propose a new approach to esti-
mate the distance from a camera to an object in the
scattering media. From the images taken in scattering
media, we can obtain image intensity, even if image
feature points cannot be extracted properly. Further-
more, the image intensity in scattering media changes
according to the distance from the camera to the ob-
ject because of the scatter of light. Thus the change
in intensity is an important clue to obtain the 3D in-
formation. Thus, we in this paper consider a method
for estimating time-to-contact toward objects from the
change in image intensity obtained in scattering me-
dia.
The estimation of time-to-contact is a traditional
technique, which estimates a time toward collision
of a moving camera to an object. In the existing
methods, the time-to-contact is estimated by using
the change in size of geometric features, such as dis-
tance between two image points in consecutive im-
ages. In recent years, Watanabe et al. (Watanabe
658
Jeong W., Rahadianti L., Sakaue F. and Sato J..
Time-to-Contact in Scattering Media.
DOI: 10.5220/0005362706580663
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 658-663
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

(a) Clear environment
(b) Scattering media
Figure 1: Difference of observed images in clear environ-
ment and in scattering media.
Figure 2: Light scatter in scattering media. The light rays
from a light source are reflected at an object surface and
scattered by micro particles.
et al., 2014) proposed a method for estimating time-
to-contact from the change in intensity in images.
Their method does not require geometric image fea-
tures, and hence it can be used even if the geomet-
ric features are not available in images, such as night
images. In this paper, we extend their method and
propose a new method for estimating time-to-contact,
which can be used even in the scattering media, such
as fog and smoke. By using the proposed method,
we can estimate time-to-contact even if we cannot
obtain correspondences from image taken in scatter-
ing media. The proposed method does not need the
reflectance of object surface, the properties of light
source and the property of scattering media. Thus,
the method can be applied to various applications in
scattering media.
2 ESTIMATION OF
TIME-TO-CONTACT
In the existing methods, the time-to-contact is esti-
mated from geometric information, such as object
size in images(Cipolla and Blake, 1992; Subbarao,
1990; Horn et al., 2007). In this section, we revisit
the basic theory of the estimation of time-to-contact.
Let us consider the case where an object whose
width is W is observed by a camera as shown in
Fig.3(a). When the distance between the camera and
the object is Z, the apparent width w of the observed
object in a camera image can be described as follows:
w =
fW
Z
(1)
where f is a focal length of the camera. We next con-
sider the case where the camera moves with ∆Z to-
ward the object as shown in Fig.3(b). Then, the ob-
served length w
′
after the motion can be described as
follows:
w
′
=
fW
Z + ∆Z
(2)
In this case, the time-to-contact is T = Z/∆Z. The
time-to-contact can be estimated from just observed
images as follows:
T =
w
′
w
′
−w
(3)
In this equation, we do not need any information, such
as the focal length f , distance Z and the real width of
object W for estimating time-to-contact. We just need
w and w
′
in observed images. The technique is very
useful, since we can estimate time-to-contact without
calibrating cameras and without knowing 3D geome-
try. Furthermore, we can reconstruct a real distance Z
if we have the relative speed ∆Z of the camera with
respect to the object.
However, this technique cannot be used when
we cannot obtain appropriate geometric information,
such as corners and edges, in images. For exam-
ple, we cannot observe geometric features appropri-
ately in night images in general, and thus we can-
not estimate time-to-contact from these images. In
order to avoid the problem, Watanabe et al. (Watan-
abe et al., 2014) proposed a method for estimating
time-to-contact from photometric information. They
focused not on geometric information but on photo-
metric information in images for estimating time-to-
contact. By using their method, we can estimate time-
to-contact even if we cannot obtain geometric fea-
tures, such as corners and edges.
Now, let us consider the case where the objects
are in a scattering media, such as fog and smoke,
as shown in Fig.1 (b). In this case, we cannot ob-
serve geometric information appropriately like a night
scene. In addition, the change in intensity caused
by the camera motion cannot be described by a sim-
ple point light source model unlike (Watanabe et al.,
2014). Therefore, we cannot estimate time-to-contact
from the existing geometric and photometric meth-
ods. Thus, we in this paper propose a new method
for estimating time-to-contact in scattering media. In
(a) image at time t (b) image at time t + 1
Figure 3: Geometric information for estimating time-to-
contact.
Time-to-ContactinScatteringMedia
659

Figure 4: Light ray reflection by scattering media.
this method, we do not need any information on target
object, such as reflectance of object surface. Further-
more, we do not need any information on the scat-
tering media, such as scattering coefficients. Even if
we do not have these informations, we can estimate
time-to-contact just from observed images.
3 LIGHT RAY SCATTER IN
SCATTERING MEDIA
3.1 Single Scattering Model
Now, let us consider a representation of observed in-
tensity in scattering media. In this paper, we assume
that the scattering media is homogeneous, and its den-
sity is not so high. In this case, the behavior of light
rays in scattering media can be represented by a single
scattering model. Thus, we consider the single scat-
tering model (Narasimhan et al., 2005) in this section.
In the single scattering model, input light rays are
reflected by micro particles only once. Note that the
reflected light rays go forward not to a single direction
but to all directions from the micro media. This prop-
erty is represented by using a phase function P . In
this paper, we use the first-order approximation of the
phase function (Narasimhan et al., 2005) as follows:
P (g,α) =
1
4π
(1 + gcos α) (4)
where g ∈ (−1,1) indicates a parameter controlling
shape of phase function. The α represents angle be-
tween an input light ray and reflected direction as
shown in Fig.4.
By using the function P , observed intensity of
light reflected by a media is described as follows:
I
m
=
1
d
2
p
EτP (g,α)e
−τ(d
p
+d
c
)
(5)
where τ is a scattering coefficient, E is a radiance of
light ray and d
p
and d
c
are distances from the light
source to the particle and the particle to the camera
respectively.
Figure 5: Light ray scatter by scattering media. The light
rays reflected by objects are diffused by micro particles in
scattering media.
3.2 Direct and Back-Scattered
Components
We next consider reflection in scattering media. In
this paper, we assume that a camera and a light source
are very close to each other. In addition, they are
fixed as shown in Fig.5. This assumption is reason-
able, since in many cases light sources and cameras
are fixed to each other, such as a head lump and a
camera on a vehicle.
In this case, observed intensity I
o
consists of three
components as follows:
I
o
= I
d
+ I
b
+ I
i
(6)
where I
d
is a direct reflection of the light from object
surface,
b
is a back-scattered component from scatter-
ing media and I
i
is an indirect reflection from object
surface as shown in Fig.5.
Let us consider the detail of these components.
We first consider the direct component I
d
. In this
component, light rays from the light source are re-
flected at the object surface, and are observed by the
camera as shown in Fig.5. The light rays are atten-
uated by scattering in the scattering media. In addi-
tion, the magnitude of light is inversely proportional
to squared distance from the light source. Suppose
d
l
and d
c
indicate distances from the light source to
the surface and distance from surface to camera re-
spectively. Then, the observed intensity I
d
can be de-
scribed as follows:
I
d
= Eρ cos θ
1
d
2
l
e
−(d
l
+d
c
)τ
(7)
where E denotes a power of light, ρ denotes a re-
flectance of object surface, θ denotes an angle be-
tween the light direction and a surface normal and
τ denotes an attenuation coefficient of the scattering
media. In this paper, we assume that the light source
and the camera are very close to each other, and thus
the distance d
c
and d
l
can be described by a single
component d approximately. Therefore, Eq.(7) can
be rewritten as follows:
I
d
= Eρ cos θ
1
d
2
e
−2dτ
(8)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
660

In addition, we assume that the camera and light
source face to the object, i.e. θ ∼ 0, in this paper.
Under this assumption, Eq.(8) can be rewritten as fol-
lows:
I
d
= Eρ
1
d
2
e
−2dτ
(9)
In this paper, we use Eq.(9) as a representation of the
direct component.
We next consider the back-scatter components I
b
.
In this component, light rays from the light source are
reflected by micro particles and observed by the cam-
era. Note that observed light rays are the integration
of reflected light rays by all the particles. Therefore,
observed I
b
can be represented as follows:
I
b
=
∫
d
0
1
x
2
EτP (g,α)e
−2τx
dx = B(d) (10)
As described above, positions of the light source and
the camera are the same, and thus the angle α is 0
approximately. In this case, I
b
depends only on the
distance d, and hence we describe it as B(d).
Finally, we consider the indirect component I
i
. In
this component, light rays from the light source are
reflected on a object surface. After that, the reflected
light rays are scattered by micro particles. In general,
the effect of this component is sufficiently small com-
paring with the other components, since the amount
of light reflected by the object surface is much smaller
than the light rays from the light source. Thus we ig-
nore the indirect component in this paper.
Therefore, by substituting (9) and (10) into (6),
the observed intensity I
o
in scattering media can be
described as follows:
I
o
= Eρ
1
d
2
e
−2dτ
+ B(d) (11)
In the next section, we derive a method for estimat-
ing time-to-contact in scattering media by using the
observed intensity I
o
shown in (11).
4 TIME-TO-CONTACT IN
SCATTERING MEDIA
Let us consider the estimation of time-to-contact in
scattering media. For estimating time-to-contact, we
assume that the observed object faces to the camera
and the light source. Thus, the angle between a sur-
face normal and a light source direction is equal to
0. Also, the object has a texture, which are the re-
flectances at two different points are different from
each other, although these reflectances are unknown.
Let ρ(x
1
) and ρ(x
2
) denote reflectance at point x
1
and x
2
. In this case, observed intensity I(x
1
), I(x
2
) of
these two points can be described as follows:
I(x
1
) = Eρ(x
1
)
1
d
2
e
−2τd
+ B(d) (12)
I(x
2
) = Eρ(x
2
)
1
d
2
e
−2τd
+ B(d) (13)
Since these equations have the same component B(d),
the back-scattered component B(d) can be eliminated
as follows:
I(x
1
) −I(x
2
) = E(ρ(x
1
) −ρ(x
2
))
1
d
2
e
−2τd
= E
¯
ρ
1
d
2
e
−2τd
=
¯
I (14)
We next consider the case where the light source and
the camera move with the speed of ∆d toward the ob-
ject. Then, the observed intensities I
′
(x
2
) and I
′
(x
2
)
after the motion with ∆d are described as follows:
I
′
(x
1
) = Eρ(x
1
)
1
(d + ∆d)
2
e
−2τ(d+∆d)
+ B(d + ∆d)
(15)
I
′
(x
2
) = Eρ(x
2
)
1
(d + ∆d)
2
e
−2τ(d+∆d)
+ B(d + ∆d)
(16)
From these intensities, we can compute
¯
I
′
after the
motion as follows:
I
′
(x
1
) −I
′
(x
2
) = E(ρ(x
1
) −ρ(x
2
))
1
(d +∆d)
2
e
−2τ(d+∆d)
= E
¯
ρ
e
−2τ∆d
(d +∆d)
2
e
−2τd
=
¯
I
′
(17)
By dividing
¯
I by
¯
I
′
, we can eliminate the reflectance
and the light power as follows:
¯
I
¯
I
′
=
(d + ∆d)
2
d
2
e
2τ∆d
(18)
Similarly, we compute
¯
I
′
/
¯
I
′′
as follows:
¯
I
′
¯
I
′′
=
(d + 2∆d)
2
(d + ∆d)
2
e
2τ∆d
(19)
where,
¯
I
′′
denotes
¯
I after the camera motion with 2∆d.
Equation(18) and Eq.(19) includes the same unknown
component e
2τ∆d
. Thus, we eliminate it by taking a
ratio between
¯
I
¯
I
′
and
¯
I
′
¯
I
′′
as follows:
¯
I
′2
¯
I
¯
I
′′
=
d
2
(d + 2∆d)
2
(d + ∆d)
4
(20)
Squared root of this equation can be represented as
follows:
J =
√
¯
I
′2
¯
I
¯
I
′′
=
d(d + 2∆d)
(d + ∆d)
2
(21)
Time-to-ContactinScatteringMedia
661
By using the time-to-contact T , the distance d can be
described as d = T ∆d. Thus, Eq.(21) can be rewritten
by using T as follows:
J =
T ∆d(T ∆d + 2∆d)
(T ∆d + ∆d)
2
=
T (T + 2)
(T + 1)
2
(22)
Finally, we can derive the estimation of time-to-
contact T from the solution of Eq.(22) as follows:
T =
−J + 1 ±
√
−J + 1
J −1
(23)
Note that, the equation has two solutions. One of
them indicates time-to-contact when the observed in-
tensities changed from I to I
′
and I
′′
and the other one
indicates when the observed intensities changed from
I
′′
to I
′
and I. If the light source moves forward to
the object, one of them is positive and the other one is
negative. Therefore, we choose positive one for esti-
mation of time-to-contact.
As shown in the above equation, we do not need
any information about the observed object, camera
and the scattering media, and we can estimate time-
to-contact just from the observed intensities. In the
following section, we show experimental results by
using the proposed method.
5 EXPERIMENTAL RESULTS
5.1 Environment
We show some experimental results by using the pro-
posed method. In this experiment, we utilized syn-
thesized images in order to control the dense of the
scattering media accurately. We assume that a tar-
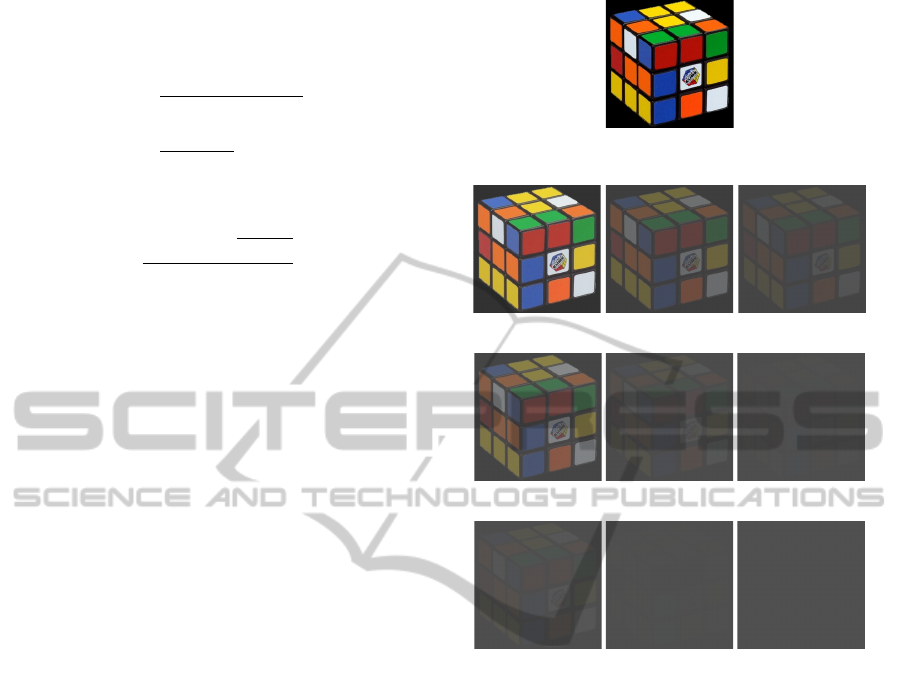
get object as shown in Fig.6 was situated in scatter-
ing media. The object was taken by orthogonal cam-
era, and thus the position and the scale of the object
are unchanged, even if the distance from the object
to the camera and the light is changed. This is be-
cause the main focus of this paper is the estimation of
time-to-contact from intensities. The number of bits
of these images is 12. The correspondence problem is
not considered in this experiment. The distance from
the camera/light to the object was changed from 20
cm to 10 cm with the speed of 1 cm/sec. Images were
taken by the camera in each second. Examples of the
taken images are shown in Fig.7. The scattering co-
efficient τ was changed from 0.05 to 0.20 as shown
Fig.7. When τ becomes large, the object intensity
decreases rapidly. From these images, the time-to-
contact was estimated by using the proposed method.
Figure 6: Target object.
(i)10 cm (ii)15 cm (iii)20 cm
(a) τ = 0.05
(i)10 cm (ii)15 cm (iii)20 cm
(b) τ = 0.10
(i)10 cm (ii)15 cm (iii)20 cm
(c) τ = 0.20
Figure 7: Examples of input images: (a), (b) and (c) show
images in scattering media with τ of 0.05, 0.1 and 0.2 re-
spectively.
5.2 Results
We next show the experimental results from the pro-
posed method. Figure8 shows estimated time-to-
contact by the proposed method. Note that estimated
time-to-contact does not appear sometimes in this fig-
ure, since the time-to-contact is not computed when
the change in intensity is smaller than a threshold.
This is because our method is based on the change
in intensity, and thus it cannot provide valid results
when the change in intensity is extremely small.
From these results, we find that our method can
estimate time-to-contact when the distance is small
under small scattering coefficient. However, the es-
timated results become unstable when the distance is
large or the scattering coefficient is very small. This
is because the change in intensity becomes very small
under these conditions. In these cases, the estimated
results are affected by various kinds of noise includ-
ing the quantization error.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
662
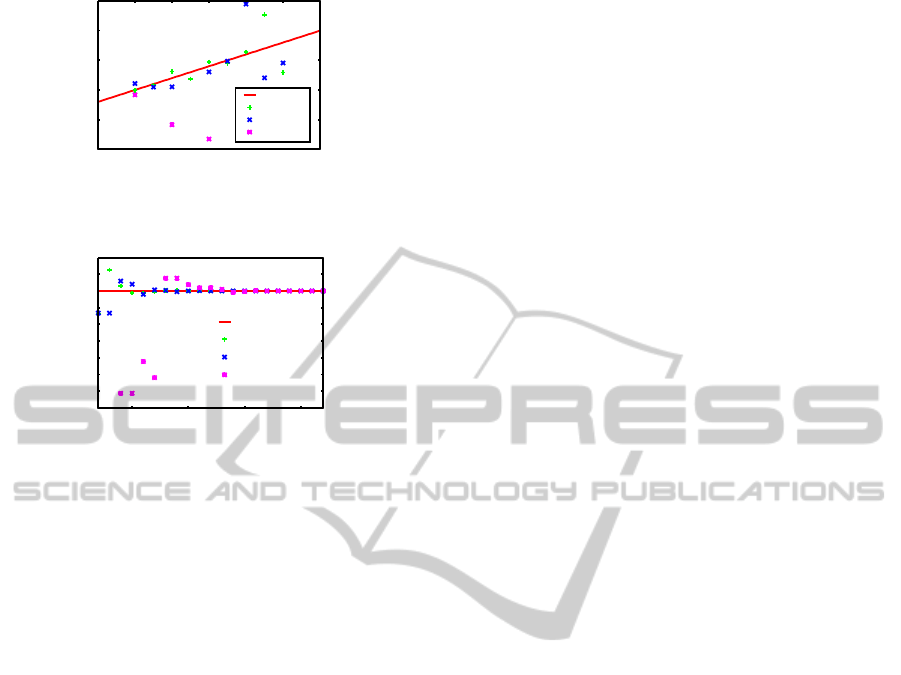
0
5
10
15
20
25
8 10 12 14 16 18 20
Ground truth
τ=0.05
τ=0.10
τ=0.20
Distance[cm]
Time-to-Contact[sec]
Figure 8: Estimated time-to-contact under τ = 0.05, τ =
0.10 and τ = 0.20.
8
9
10
11
12
13
14
15
16
17
15 20 25 30
number of bit
Time-to-contact[sec]
Ground truth
τ=0.05
τ=0.10
τ=0.20
Figure 9: Relationship between the estimated time-to-
contact and the number of bits. The distance from the light
to the object was 15 cm.
In order to clarify the relationship between the
number of bits and the accuracy of estimation, time-
to-contact was estimated with different number of
bits. Figure 9 shows the relationship between the
number of bits and the accuracy of estimation. In
this experiment, distance between the light and the
target was 15 cm, and thus the ground truth of time-to-
contact was 15 seconds. In this experiment, we could
not estimate time-to-contact correctly when a num-
ber of bits are small because of the quantization error.
However, we can estimate the time-to-contact cor-
rectly when the number of bits becomes large. These
results indicate that the proposed method can estimate
time-to-contact from high accuracy images even if the
scattering coefficient is high.
6 CONCLUSION
In this paper, we proposed a method for estimating
time-to-contact in scattering media. In the scattering
media, the behavior of light rays is very complex, and
we need a lot of information on the scattering media
and objects for obtaining 3D information in general.
In spite of the complexity in scattering media, the
proposed method can estimate time-to-contact easily
even if we do not have any information about ob-
served objects, cameras and scattering media. The
method is very useful, since we does not need any
priory knowledge for estimating the time-to-contact.
Thus, the method can be applied to various applica-
tions in scattering media.
REFERENCES
Cipolla, R. and Blake, A. (1992). Surface orientation and
time to contact from image diver-gence and deforma-
tion. In Proc. European Conference on Computer Vi-
sion, pages 465–474.
Fattal, R. (2008). Single image dehazing. In Proc. SIG-
GRAPH, pages 1–9.
He, K., 0001, J. S., and Tang, X. (2011). Single image haze
removal using dark channel prior. In CVPR, pages
1956–1963. IEEE.
Horn, B., Fang, Y., and Masaki, I. (2007). Time to con-
tact relative to a planar surface. In Proc. Intelligent
Vehicles Symposium, pages 68–74.
Kopf, J., Neubert, B., Chen, B., Cohen, M. F., Cohen-
Or, D., Deussen, O., Uyttendaele, M., and Lischin-
ski, D. (2008). Deep photo: Model-based photo-
graph enhancement and viewing. ACM Transactions
on Graphics (Proceedings of SIGGRAPH Asia 2008),
27(5):116:1–116:10.
Namer, E. and Schechner, Y. (2006). Blind haze separation.
In Proc. Conference on Computer Vision and Pattern
Recognition(CVPR), pages 1984–1991.
Narasimhan, S., Nayar, S., Sun, B., and Koppal, S. (2005).
Structured light in scattering media. In Proc. Inter-
national Conference on Computer Vision, pages 420–
427.
Narasimhan, S. and Nayer, S. (2001). Chromatic frame-
work for vision in bad weather. In Proc. Conference
on Computer Vision and Pattern Recognition, pages
598 – 605.
Narasimhan, S. G. and Nayar, S. (2003a). Interactive
deweathering of an image using physical models.
In IEEE IEEE Workshop on Color and Photomet-
ric Methods in Computer Vision, In Conjunction with
ICCV.
Narasimhan, S. G. and Nayar, S. K. (2003b). Contrast
restoration of weather degraded images. IEEE PAMI,
25(6):713 – 724.
Schechner, Y., Narasimhan, S., and Nayar, S. (2001). In-
stant dehazing of images using polarization. In Proc.
Conference onf Computer Vision and Pattern Recog-
nition, volume I, pages 325–332.
Subbarao, M. (1990). Bounds on time-to-collision and rota-
tional component from first-order derivatives of image
flow. Computer Vision, Graphics, and Image Process-
ing, 50(3):329–341.
Tarel, J.-P. and Hautiere, N. (2009). Fast visibility restora-
tion from a single color or gray level image. In ICCV,
pages 2201–2208.
Watanabe, Y., Sakaue, F., and Sato, J. (2014). Time-to-
contact from photometric information. IPSJ Transac-
tions on Computer Vision and Applications, 6:39–42.
Time-to-ContactinScatteringMedia
663
