
Un-restricted Common Due-Date Problem with Controllable Processing
Times
Linear Algorithm for a Given Job Sequence
Abhishek Awasthi
1
, J
¨
org L
¨
assig
1
and Oliver Kramer
2
1
Department of Computer Science, University of Applied Sciences Zittau/G
¨
orlitz, G
¨
orlitz, Germany
2
Department of Computing Science, Carl von Ossietzky University of Oldenburg, Oldenburg, Germany
Keywords:
Scheduling, Algorithms, Simulated Annealing, NP-Hard.
Abstract:
This paper considers the un-restricted case of the Common Due-Date (CDD) problem with controllable pro-
cessing times. The problem consists of scheduling jobs with controllable processing times on a single machine
against a common due-date to minimize the overall earliness/tardiness and the compression penalties of the
jobs. The objective of the problem is to find the processing sequence of jobs, the optimal reduction in the
processing times of the jobs and their completion times. In this work, we first present and prove an essential
property for the controllable processing time CDD problem for the un-restricted case along with an exact lin-
ear algorithm for optimizing a given job sequence for a single machine with a run-time complexity of O(n),
where n is the number of jobs. Henceforth, we implement our polynomial algorithm in conjunction with a
modified Simulated Annealing (SA) algorithm and Threshold Accepting (TA) to obtain the optimal/best pro-
cessing sequence while comparing the two heuristic approaches, as well. The implementation is carried out
on appended CDD benchmark instances provided in the OR-library.
1 INTRODUCTION
The Common Due-Date scheduling problem involves
sequencing and scheduling of jobs over machine(s)
against a common due-date. Each job possesses a pro-
cessing time and different penalties per unit time in
case the job is completed before or after the due-date.
For the controllable processing time case, in addition
to the CDD, the processing times of some or all the
jobs can be reduced to a certain minimum value at a
cost of some penalty per unit of reduction. This con-
trolling of the processing times can help the jobs to
reduce their earliness/tardiness penalties if the penal-
ties incurred due to the compressions are relatively
smaller than the earliness/tardiness penalties. The ob-
jective of solving the problem is to obtain the optimal
job sequence, final processing times of the jobs and
the completion times of all the jobs to minimize the
total weighted penalty. Generally speaking, there are
two classes of common due-date problem, which have
proven to be NP-hard, namely the restrictive and the
un-restrictive CDD problem. In this work, we con-
sider the un-restrictive case of the problem, where the
common due-date is greater than or equal to the sum
of the processing times of all the jobs and each job
possesses different penalties. The CDD has already
been proven to be NP-hard, and clearly the control-
lable case is NP-hard as well (Yunqiang et al., 2013;
Biskup and Feldmann, 2001). For the controllable
processing times common due-date problem, (Biskup
and Cheng, 1999) studied it with constant penalties
for earliness/tardiness and distinct penalties for com-
pression. They also considered the penalty for the
completion time of the jobs and proved the similar-
ity of the problem to the assignment problem. (Shab-
tay and Steiner, 2007) made an extensive survey for
scheduling with controllable processing times, cov-
ering research in this field from the last 25 years.
(Wan, 2007) studied the common due window prob-
lem with controllable processing times with constant
earliness/tardiness penalties and distinct compression
costs and discussed some properties for the optimal
solution along with a polynomial algorithm for solv-
ing the problem. (Tseng et al., 2009) studied the
general CDD problem with compressible processing
times with different due-dates and presented a heuris-
tic algorithm to minimize the total tardiness and the
compression penalties. (Nearchou, 2010) studied a
slightly different version of the problem where the
objective was to minimize the total weighted comple-
526
Awasthi A., Lässig J. and Kramer O..
Un-restricted Common Due-Date Problem with Controllable Processing Times - Linear Algorithm for a Given Job Sequence.
DOI: 10.5220/0005398205260534
In Proceedings of the 17th International Conference on Enterprise Information Systems (ICEIS-2015), pages 526-534
ISBN: 978-989-758-096-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
tion times and the compression costs and presented
a population based metaheuristic algorithm, consider-
ing four different heuristic approaches namely, differ-
ential evolution, particle swarm optimization, genetic
algorithms and evolution strategies. We would em-
phasize here that the CDD problem with controllable
processing times for a fixed due-date has not been
studied before for the asymmetric penalties. In this
paper, we consider the single machine case for the
un-restricted CDD problem with asymmetric penal-
ties and controllable processing times with distinct
linear costs. We make a theoretical study of the prob-
lem and first present an important property for this
problem. We then propose an O(n) exact polynomial
algorithm to optimize a given job sequence on a single
machine.
2 PROBLEM FORMULATION
In this Section, we present the mathematical notation
of the common due-date problem with the control-
lable processing times. Let n be the number of jobs
and d be the common due-date. Besides, p
i
and m
i
be the actual and minimum processing times, respec-
tively with x
i
being the actual reduction in the pro-
cessing time for job i. Let, E
i
,T
i
and C
i
be the ear-
liness, tardiness and completion time of job i. And
α
i
,β
i
and γ
i
be the earliness, tardiness and compres-
sion penalties per time unit for any job i. Clearly, E
i
and T
i
can be expressed as E
i
= max{0,d −C
i
} and
T
i
= max{0,C
i
−d} for i = 1,2,...,n. Then, the ob-
jective function of the problem can be expressed as,
min
n
∑
i=1
(E
i
·α
i
+ T
i
·β
i
+ x
i
·γ
i
) . (1)
1
n
−−−− −−−
t = 0
C
r
= d
Figure 1: Assume that the rth job finishes at the due-date d
in the optimal solution.
We now present some properties for both the CDD
and CDD with controllable processing times. Let the
solution value for the case when there is no compres-
sion of the processing times and the due-date lies at
the completion time of job r, as shown in Figure 1, be
Sol
r
, then we have
Sol
r
=
r−1
∑
i=1
r
∑
j=i+1
p
j
α
i
+
n
∑
i=r+1
i
∑
j=r+1
p
j
β
i
, (2)
where
r−1
∑
i=1
r
∑
j=i+1
p
j
= the total earliness for any job i and
n
∑
i=r+1
i
∑
j=r+1
p
j
= the total tardiness for any job i.
Let us assume that the reductions in the process-
ing times in the optimal schedule be x
i
for all i =
1,2,...,n. Then the objective function value (Sol
0
r
)
when the due-date position is at C
r
will be
Sol
0
r
=
r−1
∑
i=1
r
∑
j=i+1
(p
j
−x
j
)α
i
+
n
∑
i=r+1
i
∑
j=r+1
(p
j
−x
j
)β
i
+
n
∑
j=1
x
j
γ
j
.
(3)
We first present and prove an important property re-
garding the amount of compression of the processing
times of the jobs.
Property 1. If controlling the processing times
fetches a better solution, then the compression of the
processing times should be to their minimum value.
Proof. If the compression of the processing times
fetches a better solution, then we have Sol
0
r
≤ Sol
r
.
Using Equation (2) and (3), we obtain
r−1
∑
i=1
r
∑
j=i+1
x
j
α
i
+
n
∑
i=r+1
i
∑
j=r+1
x
j
β
i
−
n
∑
j=1
x
j
γ
j
≥ 0 . (4)
Let us assume that instead of reducing the process-
ing times by x
j
, we reduce them by y
j
, where y
j
< x
j
∀j = 1,2,...,. Let the solution value for this case be
Sol
0
r
0
and x
j
−y
j
= δ
j
. If Sol
0
r
0
< Sol
0
r
, then with some
manipulation of the terms we get
r−1
∑
i=1
r
∑
j=i+1
δ
j
α
i
+
n
∑
i=r+1
i
∑
j=r+1
δ
j
β
i
−
n
∑
j=1
δ
j
γ
j
≤ 0 . (5)
Since x
j
≥0 ∀j = 1,2,...,n, Equation (4) should also
hold for any δ
j
> 0. However, Equation (5) is a con-
tradiction. Hence, our assumption that Sol
0
r
0
< Sol
0
r
is
wrong. This proves that the solution value only im-
proves if we reduce the processing times furthermore,
which in turn shows that the best solution value will
be obtained for maximum possible compression of the
processing times.
Let the solution value for the CDD when the (r + 1)th
job ends at the due-date be Sol
r+1
as shown in Fig-
ure 2, then
Sol
r+1
=
r
∑
i=1
r+1
∑
j=i+1
p
j
!
α
i
+
n
∑
i=r+2
i
∑
j=r+2
p
j
!
β
i
.
(6)
Un-restrictedCommonDue-DateProblemwithControllableProcessingTimes-LinearAlgorithmforaGivenJob
Sequence
527

1
n
−−−− −−−
t = 0
C
r+1
= d
Figure 2: Schedule with the completion time of job r + 1
lying at the due-date, C
r+1
= d.
For the optimal reductions x
i
in the processing times,
the solution value Sol
0
r+1
will be
Sol
0
r+1
=
r
∑
i=1
r+1
∑
j=i+1
(p
j
−x
j
)
!
α
i
+
n
∑
j=1
x
j
γ
j
+
n
∑
i=r+2
i
∑
j=r+2
(p
j
−x
j
)
!
β
i
.
(7)
1
n
−−−− −−−
t = 0
C
r−1
= d
Figure 3: Schedule with the completion time of job r −1
lying at the due-date, C
r−1
= d.
Let the solution value for CDD when the (r −1)th job
ends at the due-date be Sol
r−1
(Figure 3), then
Sol
r−1
=
r−2
∑
i=1
r−1
∑
j=i+1
p
j
!
α
i
+
n
∑
i=r
i
∑
j=r
p
j
!
β
i
. (8)
As earlier, for a reduction of x
i
in the processing
times, the solution value Sol
0
r−1
will be
Sol
0
r−1
=
r−2
∑
i=1
r−1
∑
j=i+1
(p
j
−x
j
)
!
α
i
+
n
∑
j=1
x
j
γ
j
+
n
∑
i=r
i
∑
j=r
(p
j
−x
j
)
!
β
i
.
(9)
Since we know Sol
r
is optimal we have
Sol
r
≤ Sol
r+1
and (10)
Sol
r
≤ Sol
r−1
. (11)
Rearranging the terms in Sol
r
,Sol
r+1
and Sol
r−1
from
Equations (2), (6) and (8) respectively, we get
Sol
r
≤Sol
r+1
,
n
∑
i=r+1
β
i
≤
r
∑
i=1
α
i
(12)
and
Sol
r
≤Sol
r−1
,
r−1
∑
i=1
α
i
≤
n
∑
i=r
β
i
.
(13)
Equation (12) also implies that
n
∑
i=k+1
β
i
≤
k
∑
i=1
α
i
,k = r,r + 1, . . . , n −1, (14)
that is, if the sum the tardiness penalties for the jobs
r + 1 to n is less than the sum of the earliness penal-
ties for the jobs from 1 to r, then the inequality also
holds for any k ≥ r, since β
i
> 0 and α
i
> 0 for
i = 1,2,...,n.
Likewise, Equation (13) also implies that
k−1
∑
i=1
α
i
≤
n
∑
i=k
β
i
,k = 1, 2, . . . , r, (15)
that is, if the sum the earliness penalties for the jobs
1 to r −1 is less than the sum of the tardiness penal-
ties for the jobs from r to n, then the inequality also
holds for any k ≤ r, since β
i
> 0 and α
i
> 0 for
i = 1, 2, . . . , n. This proves that the difference of the
sum of the earliness penalties and the sum of the tar-
diness penalties changes sign before and after the op-
timal position of the due-date. The idea for Equa-
tion (14) and (15) has been adopted from (Cheng,
1989), where these properties were derived for a spe-
cial case of the CDD problem.
We now use this property of the CDD prove an es-
sential property for the un-restricted case of the CDD
with controllable processing times.
Theorem 1. If the due-date position in the optimal
schedule of un-restricted case of the CDD lies at the
completion time of some job r, then its position re-
mains unchanged for the controllable case of the un-
restricted CDD problem.
Proof. Refer to the Appendix 1.
3 THE EXACT ALGORITHM
In the previous section we proved that if the due-date
position for the general common due-date problem
lies at the completion time of a job then its position re-
mains unchanged for the controllable processing time
case as well. We now present how to utilize this prop-
erty to formulate an exact algorithm to optimize a
given job sequence for the un-restricted of the CDD
with controllable processing times.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
528

Algorithm 1: Linear Algorithm to optimize any given
sequence of the un-restricted CDD with controllable
processing times.
1 C
i
←
∑
i
k=1
p
k
∀ i = 1,2, . . . , n
2 τ ← argmax
i=1,2,...,n
(C
i
≤ d)
3 if (τ 6= 0) then
4 pes ←
∑
τ
i=1
α
i
5 pls ←
∑
n
i=τ+1
β
i
6 if (C
τ
≤ d) ∧(pls < pes) then
7 C
i
←C
i
−C
τ
+ d ∀ i
8 while (τ > 0) ∧(pls < pes) do
9 pes ← pes −β
τ
10 pls ← pls + α
τ
11 t ← 1
12 τ ← τ −1
13 if (t = 1) then
14 C
i
←C
i
−C
τ+1
+ d ∀ i
15 σ ← argmin
i=1,2,...,n
(C
i
> d)
16 pls ←
∑
n
i=σ
β
i
17 i ←σ
18 lShi f t ← 0
19 while (i ≤n) do
20 if (γ
i
≤ pls) ∧(p
i
> m
i
) then
21 dec ← p
i
−m
i
22 lShi f t ← lShi f t + dec
23 pls ← pls −β
i
24 C
i
←C
i
−lShi f t
25 i ← i + 1
26 σ ←σ −1
27 ple ←
∑
σ−1
i=1
α
i
28 i ←σ
29 rShi f t ← 0
30 while (i > 1) do
31 if (γ
i
≤ ple) ∧(p
i
> m
i
) then
32 inc ← p
i
−m
i
33 rShi f t ← rShi f t + inc
34 ple ← ple −α
i−1
35 C
i−1
←C
i−1
+ rShi f t
36 i ← i −1
37 PT
1
← p
i
38 PT
i
←C
i
−C
i−1
, i = 2,3, . . . , n
39 Compute E
i
,T
i
, i = 1,2, 3, . . . , n
40 return
∑
n
i=1
(E
i
·α
i
+ T
i
·β
i
+ γ
i
(p
i
−PT
i
))
To optimize a given sequence for the un-restricted
case, we first find the optimal position of the due-
date for the uncompressed then reduce the process-
ing times of the jobs closest to the due-date mov-
ing outward. Consider Figure 1, the optimal posi-
tion of the due-date is at C
r
. In the next step, we
first reduce the processing times of tardy jobs start-
ing with job r + 1. Reducing its processing time such
that C
r+1
moves closer to d will not only reduce the
tardiness of job r + 1 but of all the jobs which fol-
low, provided the penalty incurred by compressing
the processing time of job r + 1 is less than the re-
duction in the weighted tardiness penalties of the jobs
r + 1,r + 2,...,n. Thereafter, we compress job r + 2
and reduce its tardiness along with all the jobs follow-
ing it. If a compression does not offer any reduction
in the overall penalty then we move on to the next job
without compressing the current job.
We perform the same operations in the sequential
manner for the remaining jobs, starting with job r to
job 2. However, in this case the reduction in the pro-
cessing times leads the jobs to move towards right,
i.e., closer to the due-date. Notice that the reduction
in the first job is never going to improve the penalty
since the earliness of the first job will not be altered
by its compression but will only offer more penalty
due to compression. Algorithm 1 presents the pseudo
code for optimizing a given sequence.
4 PROOF OF OPTIMALITY
We now provide the proof of the optimality of Algo-
rithm 1 with respect to the solution value. Recall that
we consider the un-restricted case of the CDD.
Theorem 2. Algorithm 1 returns the optimal solution
value to the un-restricted case of the CDD with con-
trollable processing times for any given job sequence
with a run-time complexity of O(n).
Proof. Since there is only one way that the due-date
position may be between the completion times of two
consecutive jobs, we need to first calculate the sum of
penalties before and after the due-date such that the
first job starts at time zero and all the jobs follow with-
out any idle time. The schedule with t
∗
= 0 will be
optimal if the sum of the tardiness penalties is already
greater than the sum of earliness penalties. If that is
not the case, we shift all the jobs towards right, as long
as the sum of the tardiness penalties of jobs finishing
after the due-date is less than or equal to the some
of the earliness penalties of all the jobs which com-
plete before the due-date, according to Equation (14)
and (15).
Hence, we first optimize any given sequence for
the general CDD problem and obtain the due-date po-
sition. We have already proved in Theorem 1 that
the due-date position for the general CDD and the
controllable processing times cases will be unaltered
Un-restrictedCommonDue-DateProblemwithControllableProcessingTimes-LinearAlgorithmforaGivenJob
Sequence
529
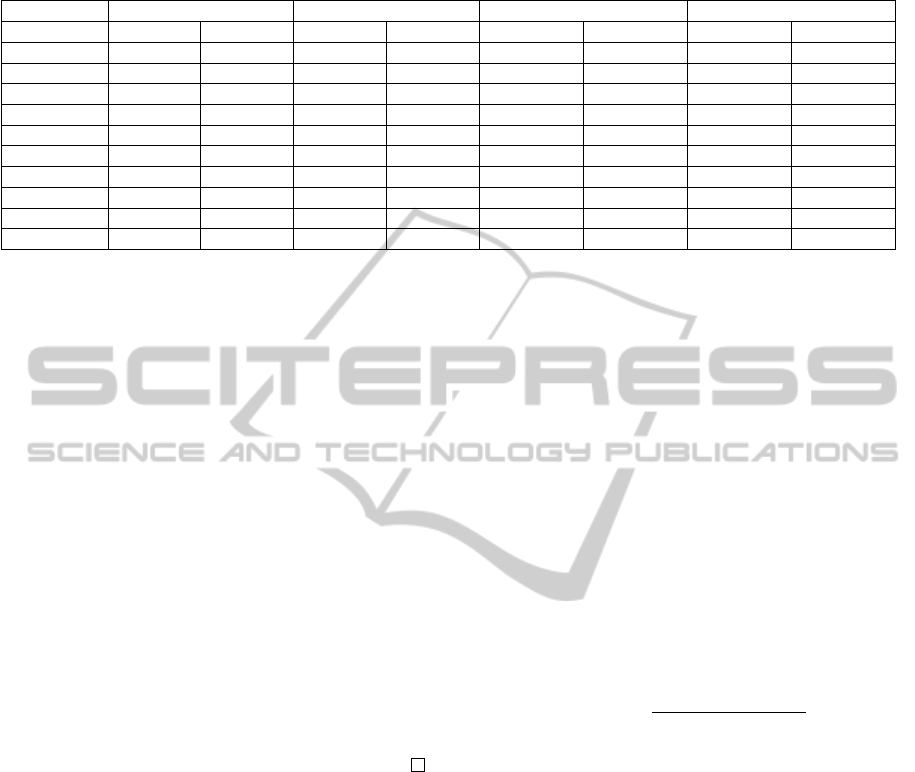
Table 1: Results obtained for single machine common due-date problem with controllable processing times. For any given
number of jobs, there are 10 different instances provided and each instance is designated a number k.
Jobs 10 20 50 100
Approach SA TA SA TA SA TA SA TA
k = 1 763 763 2576 2642 14698 14605 60156 60124
k = 2 598 598 2555 2555 11864 11890 50534 50357
k = 3 672 672 3137 3111 13840 13774 57524 57483
k = 4 757 757 2761 2761 11925 11867 60729 60837
k = 5 473 473 1949 1936 12446 12373 46217 45999
k = 6 669 669 2767 2767 12252 12194 52097 52012
k = 7 913 913 3124 3124 14848 14848 53729 53742
k = 8 497 497 1492 1492 17598 17597 68199 68044
k = 9 510 510 1774 1760 11871 11864 48789 48747
k =10 601 601 1824 1824 11856 11841 51056 51003
for the un-restricted case of the CDD. It is clear that
the optimal solution will occur only if the jobs are
brought closer to the due-date since the due-date po-
sition should not change and the best case would be
the one when all the jobs finish at the due-date, which
is impossible. Hence, we reduce the processing times
of jobs starting from the most adjacent one to the due-
date moving further away. The processing time of a
job is reduced only if the penalty incurred due to com-
pression is less than the penalty reduced by the re-
duction in the earliness (tardiness) of the jobs before
(after) it.
As for the run-time complexity, the first part of
Algorithm 1 is to optimize a given sequence for the
un-restricted CDD problem to find the optimal posi-
tion of the due-date. It can be easily observed that
the complexity for this part is of linear run-time. The
next expensive operations in terms of the run-time oc-
cur at the next two while loops and they are both of
O(n) in the worst case. The remaining steps are all
linear. Hence the overall complexity of Algorithm 1
is O(n).
5 RESULTS
Due to the unavailability of benchmark instances
for this problem as per our knowledge, we first
present our methodology to append the benchmark
instances of the general CDD provided in the OR-
library with the extra parameters for the control-
lable processing time case (Beasley, 1990). The in-
stances provided in (Beasley, 1990) provide the pro-
cessing times, earliness/tardiness penalties and the
due-date. Hence, we append the information about
the minimum processing times and the cost of con-
trolling the processing times per unit time. We take
the minimum processing time of any job as m
i
∼
DU(0.6p
i
, p
i
) and γ
i
∼ DU(1,5), where ∼ DU (a,b)
is a discrete uniform random number between a and
b. The rest of the parameters remain the same as
in (Beasley, 1990). Our updated benchmark in-
stances can be found at www.enterprise-application-
development.org/research/benchmark-data.html.
5.1 Modified Simulated Annealing
We use a modified Simulated Annealing algorithm
to generate job sequences and Algorithm 1 to opti-
mize each sequence to its minimum penalty. Our
experiments over all the instances suggest that an
ensemble size (M) of ≈ n/10 and the maximum
number of iterations of 500n, where n is the num-
ber of jobs, work best for the provided instances
in general. The runtime for all the results is the
time after which the solutions mentioned in Table 1
are obtained on average after 10 different replica-
tions. The initial temperature (T
0
) is kept as twice
the standard deviation of the energy at infinite tem-
perature: σ
E
T =∞
=
q
hE
2
i
T =∞
−hEi
2
T =∞
. We esti-
mate this quantity by randomly sampling the config-
uration space (Salamon et al., 2002). An exponential
schedule for cooling is adopted with a cooling rate of
1 −10
−4
. One of the modifications from the standard
SA is in the acceptance criterion. We implement two
acceptance criteria: the Metropolis acceptance prob-
ability, min{1,exp((−4E)/T )} and a constant ac-
ceptance probability of c ·10
−2
, c being a constant. A
solution is accepted with this constant probability if
it is rejected by the Metropolis criterion. This con-
cept of a constant probability is useful when the SA
is run for many iterations and the metropolis accep-
tance probability is almost zero, since the temperature
would become infinitesimally small.
Another modification is the increase in the tem-
perature after the annealing temperature becomes less
than one unit. In such a case we increase the temper-
ature to 1/10th of the initial temperature. Apart from
this, we also incorporate elitism in our modified SA.
Elitism has been successfully adopted in evolutionary
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
530
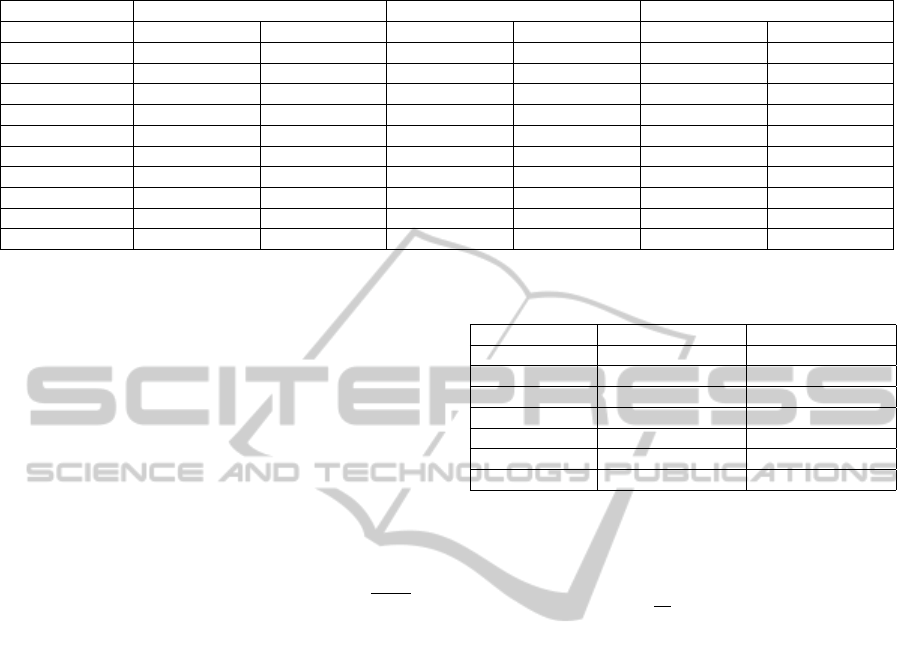
Table 2: Table 1 continued...
Jobs 200 500 1000
Approach SA TA SA TA SA TA
k = 1 205307 205088 1324829 1325310 5354091 5460812
k = 2 224213 224136 1425334 1426581 5138818 5259803
k = 3 215669 215528 1371225 1370031 5051903 5165823
k = 4 243170 242875 1372239 1371316 5128463 5256762
k = 5 214962 214936 1211943 1212666 5278280 5393347
k = 6 199305 199157 1189069 1189804 5073112 5185676
k = 7 210827 210815 1357730 1357399 5514919 5633111
k = 8 190068 189791 1287052 1286917 5099539 5204219
k = 9 215707 215556 1396230 1397012 5215425 5375118
k = 10 228356 228071 1264289 1264434 5187998 5292440
algorithms for solving complex optimization prob-
lems (Gen et al., 1994; Kim, 2013). L
¨
assig and Sud-
holt made theoretical studies analysing speed-ups in
parallel evolutionary algorithms with elitism applied
to combinatorial optimization problems (L
¨
assig and
Sudholt, 2011; L
¨
assig and Sudholt, 2013). In (L
¨
assig
and Hoffmann, 2009) it is shown that for a large class
of quality measures, the best possible probability dis-
tribution is a rectangular distribution over certain in-
dividuals sorted by their objective values, which can
be seen as a mild form of elitism. As for the pertur-
bation rule, we first randomly select a certain number
of jobs in any job sequence and permute them ran-
domly to create a new sequence. The number of jobs
selected for this permutation is taken as c +b
p
n/10c,
where n is the number of jobs and c is a constant. This
modified SA works well for the CDD and the Air-
craft Landing Problem as well (Awasthi et al., 2013b;
Awasthi et al., 2013a).
5.2 Threshold Accepting
Threshold Accepting is another heuristic algorithm
based on Simulated Annealing, proposed by (Dueck
and Scheuer, 1990). The basic difference from the
SA is the different acceptance rules. Unlike the stan-
dard SA where a worse solution is accepted as per the
metropolis acceptance criterion, TA instead accepts
’every new configuration which is not much worse
than the old one’ (Dueck and Scheuer, 1990). We
now present the exact details of the acceptance crite-
rion adopted by us in this work.
The initial temperature (T
0
) is kept the same as in
Simulated Annealing. As opposed to the exponential
cooling schedule of SA, we adopt probabilistic arith-
metic cooling scheduling in TA. Let, mE
j
and mE
j−1
be the mean of the energy (in this optimization prob-
lem, energy is the objective function values) of all
the states in the current ( j) and the previous iteration
( j −1), respectively. Then, the temperature T
j
is re-
duced as
Table 3: Average run-time in seconds for all the 10 different
instances for each job over 10 iterations of the algorithm.
Jobs SA TA
10 0.173 0.490
20 1.147 0.931
50 6.017 7.768
100 13.510 21.637
200 50.973 88.822
500 171.806 221.410
1000 361.553 603.711
T
j
=
(
T
j−1
−δ, if mE
j
−mE
j−1
≤ prob ,
T
j−1
, otherwise .
(16)
In Equation (16), δ and prob are defined as δ = τ ·
T
0
and prob = v ·T
0
/
√
M, where τ = c ·10
−1
and v =
c·10
−4
, c being a constant and M is the ensemble size.
The acceptance criterion for Threshold Accepting as
proposed by (Dueck and Scheuer, 1990) is the current
temperature T
j
. The remaining parameters such as the
ensemble size, perturbation size and the number of
iterations are kept the same for both SA and TA, so as
to exactly compare the two approaches.
In Table 1 and 2, we present our results for the
CDD with controllable processing times for the un-
restricted case, for the benchmark instances. For the
first 10 instances with 10 jobs, SA and TA both reach
the optimal solution as it turns out by the compari-
son results with integer programming. For the small
instances with 20,50 and 100 jobs, we observed that
the Threshold Acceptance offers predominantly bet-
ter results in terms of the objective values as shown
in Table 1. TA achieves better results for 17 and
equal results for 8 instances out of 30 instances. How-
ever, for the large instances with 200,500 and 1000
jobs, the difference in the two heuristic approach was
marginal with 16 better results for SA and 14 for TA,
as shown in Table 2. Hence, as far as the quality of
the solution is concerned, Threshold Accepting and
Simulated Annealing offer almost the same quality of
results. This was not the case for the run-times of
the two approaches. In Table 3 we can see the time
Un-restrictedCommonDue-DateProblemwithControllableProcessingTimes-LinearAlgorithmforaGivenJob
Sequence
531

required by both the approaches. The run-times of
TA and SA are almost the same for small instances
till 50 jobs. However, for large instances with 100
and more jobs, Simulated Annealing performs much
faster then the Threshold Accepting. Considering, the
same quality of solution values for both, in our ex-
perience the modified Simulated Annealing algorithm
proposed in this work performs better than Threshold
Accepting for the optimization problem dealt with.
6 CONCLUSION AND FUTURE
DIRECTION
In this paper we present a novel property for the prob-
lem of scheduling against a common due-date with
controllable processing times for the un-restricted
case. We show that the due-date position in the op-
timal schedule for the un-restricted case remains the
same for both the CDD and for controllable process-
ing time cases. We then present an O(n) algorithm
for a given sequence and prove the run-time com-
plexity and its optimality with respect to the solution
value. We implement our algorithm over the bench-
mark instances provided by (Biskup and Feldmann,
2001) and appended by us for all the instances till 10
3
jobs. Besides, we encourage other researchers inter-
ested in this problem to test other approaches with our
benchmark instances.
ACKNOWLEDGEMENTS
The research project was promoted and funded by the
European Union and the Free State of Saxony, Ger-
many.
REFERENCES
Awasthi, A., Kramer, O., and L
¨
assig, J. (2013a). Aircraft
landing problem: An efficient algorithm for a given
landing sequence. In 16th IEEE International Con-
ferences on Computational Science and Engineering
(CSE 2013), pages 20–27.
Awasthi, A., L
¨
assig, J., and Kramer, O. (2013b). Common
due-date problem: Exact polynomial algorithms for
a given job sequence. In 15th International Sympo-
sium on Symbolic and Numeric Algorithms for Scien-
tific Computing (SYNASC), 2013, pages 258–264.
Beasley, J. (1990). OR-library: Distributing test problems
by electronic mail. Journal of the Operational Re-
search Society, 41(11):1069–1072.
Biskup, D. and Cheng, T. (1999). Single-machine schedul-
ing with controllable processing times and earliness,
tardiness and completion time penalties. Engineering
Optimization, 31(3):329–336.
Biskup, D. and Feldmann, M. (2001). Benchmarks for
scheduling on a single machine against restrictive and
unrestrictive common due dates. Computers & Oper-
ations Research, 28(8):787 – 801.
Cheng, T. (1989). Optimal due-date assignment and se-
quencing in a single machine shop. Applied Mathe-
matics Letters, 2(1):21–24.
Dueck, G. and Scheuer, T. (1990). Threshold accepting:
A general purpose optimization algorithm appearing
superior to simulated annealing. Journal of Computa-
tional Physics, 90(1):161 – 175.
Gen, M., Tsujimura, Y., and Kubota, E. (1994). Solving job-
shop scheduling problems by genetic algorithm. In
IEEE International Conference on Systems, Man, and
Cybernetics, 1994. Humans, Information and Tech-
nology., volume 2, pages 1577–1582.
Kim, J. (2013). Genetic algorithm stopping criteria for op-
timization of construction resource scheduling prob-
lems. Construction Management and Economics,
31(1):3–19.
L
¨
assig, J. and Hoffmann, K. (2009). Threshold-selecting
strategy for best possible ground state detection with
genetic algorithms. Phys. Rev. E, 79:046702.
L
¨
assig, J. and Sudholt, D. (2011). Analysis of speedups
in parallel evolutionary algorithms for combinatorial
optimization. In Proceedings of the 22nd Interna-
tional Conference on Algorithms and Computation,
ISAAC’11, pages 405–414. Springer-Verlag.
L
¨
assig, J. and Sudholt, D. (2013). General upper bounds on
the runtime of parallel evolutionary algorithms. pages
1–33.
Nearchou, A. (2010). Scheduling with controllable process-
ing times and compression costs using population-
based heuristics. International Journal of Production
Research, 48(23):7043–7062.
Salamon, P., Sibani, P., and Frost, R. (2002). Facts, Con-
jectures, and Improvements for Simulated Annealing.
Society for Industrial and Applied Mathematics.
Shabtay, D. and Steiner, G. (2007). A survey of scheduling
with controllable processing times. Discrete Applied
Mathematics, 155(13):1643 – 1666.
Tseng, C., Liao, C., and Huang, K. (2009). Minimizing
total tardiness on a single machine with controllable
processing times. Computers & Operations Research,
36(6):1852 – 1858.
Wan, G. (2007). Single machine common due window
scheduling with controllable job processing times. In
Combinatorial Optimization and Applications, vol-
ume 4616 of Lecture Notes in Computer Science,
pages 279–290. Springer Berlin Heidelberg.
Yunqiang, Y., Cheng, T., Cheng, S., and Wu, C. (2013).
Single-machine batch delivery scheduling with an
assignable common due date and controllable pro-
cessing times. Computers & Industrial Engineering,
65(4):652 – 662.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
532

APPENDIX 1
Proof of Theorem 1
Proof. Since there is only one way that the due-date
position may be between the completion times of two
consecutive jobs (i.e., when the first job starts at time
t = 0), we need to first calculate the sum of penal-
ties before and after the due-date such that the first
job starts at time zero and all the jobs follow without
any idle time. Thereafter, we shift all the jobs towards
right as long as the sum of the tardiness of jobs finish-
ing after the due-date is less than or equal to the some
of the earliness penalties of all the jobs which com-
plete before the due-date. Rearranging the terms of
Sol
0
r
from Equation (3), we have
Sol
0
r
=
r−1
∑
i=1
r
∑
j=i+1
(p
j
−x
j
)α
i
+
n
∑
j=1
x
j
γ
j
+
n
∑
i=r+1
i
∑
j=r+1
(p
j
−x
j
)β
i
,
Sol
0
r
=
r−1
∑
i=1
r
∑
j=i+1
p
j
α
i
−
r−1
∑
i=1
r
∑
j=i+1
x
j
α
i
−
n
∑
i=r+2
i
∑
j=r+2
x
j
β
i
+
n
∑
j=1
x
j
γ
j
+
n
∑
i=r+1
(p
r+1
−x
r+1
)β
i
+
n
∑
i=r+2
i
∑
j=r+2
p
j
β
i
.
(17)
With some manipulations of terms, Sol
0
r
can be also
written as
Sol
0
r
=
r−2
∑
i=1
r−1
∑
j=i+1
p
j
α
i
−
r−2
∑
i=1
r−1
∑
j=i+1
x
j
α
i
+
r−1
∑
i=1
(p
r
−x
r
)α
i
+
n
∑
j=1
x
j
γ
j
+
n
∑
i=r+1
i
∑
j=r+1
p
j
β
i
−
n
∑
i=r+1
i
∑
j=r+1
x
j
β
i
.
(18)
Similarly, the terms of Sol
0
r+1
in Equation (7) can re-
arranged such that
Sol
0
r+1
=
r
∑
i=1
r+1
∑
j=i+1
(p
j
−x
j
)α
i
+
n
∑
i=r+2
i
∑
j=r+2
(p
j
−x
j
)β
i
+
n
∑
j=1
x
j
γ
j
,
=
r−1
∑
i=1
r
∑
j=i+1
p
j
α
i
−
r−1
∑
i=1
r
∑
j=i+1
x
j
α
i
+
n
∑
i=r+2
i
∑
j=r+2
p
j
β
i
+
r
∑
i=1
(p
r+1
−x
r+1
)α
i
−
n
∑
i=r+2
i
∑
j=r+2
x
j
β
i
+
n
∑
j=1
x
j
γ
j
.
(19)
Likewise Sol
0
r−1
in Equation (9) can also be expressed
as
Sol
0
r−1
=
r−2
∑
i=1
r−1
∑
j=i+1
(p
j
−x
j
)α
i
+
n
∑
i=r
i
∑
j=r
(p
j
−x
j
)β
i
+
n
∑
j=1
x
j
γ
j
,
=
r−2
∑
i=1
r−1
∑
j=i+1
p
j
α
i
−
r−2
∑
i=1
r−1
∑
j=i+1
x
j
α
i
+
n
∑
i=r+1
i
∑
j=r+1
p
j
β
i
+
n
∑
i=r
(p
r
−x
r
)β
i
−
n
∑
i=r+1
i
∑
j=r+1
x
j
β
i
+
n
∑
j=1
x
j
γ
j
.
(20)
Now we prove by contradiction that the position of
the due-date will not change even after the optimal
reduction in the processing times. Let us assume that
Sol
0
r
is not optimal, then we have
Sol
0
r
> Sol
0
r+1
and (21)
Sol
0
r
> Sol
0
r−1
. (22)
Substituting values of Sol
0
r
from Equation (17) and
Sol
0
r+1
from Equation (19) in Equation (21), we have
Sol
0
r
>Sol
0
r+1
,
n
∑
i=r+1
(p
r+1
−x
r+1
)β
i
>
r
∑
i=1
(p
r+1
−x
r+1
)α
i
and
(p
r+1
−x
r+1
)
n
∑
i=r+1
β
i
−
r
∑
i=1
α
i
!
> 0 . (23)
Now, using Equation (12), we obtain
p
r+1
< x
r+1
. (24)
Likewise, substituting the values of Sol
0
r
from Equa-
tion (18) and Sol
0
r−1
from Equation (20) in Equa-
tion (22), we get
(p
r
−x
r
)
r−1
∑
i=1
α
i
−
n
∑
i=r
β
i
!
> 0 . (25)
Equation (13) then fetches
p
r
< x
r
. (26)
Equation (24) and (26) show that if the optimal so-
lution for the uncompressed case occurs such when
the due-date position is at C
r
for some r, then for the
Un-restrictedCommonDue-DateProblemwithControllableProcessingTimes-LinearAlgorithmforaGivenJob
Sequence
533

compressed case, the position of the due-date will re-
main fixed at C
r
as well, since a change in the position
of the due-date will require a compression in the pro-
cessing time which is more than the actual processing
time itself.
ICEIS2015-17thInternationalConferenceonEnterpriseInformationSystems
534
