
Algorithms for the Hybrid Fleet Vehicle Routing Problem
Fei Peng
1
, Amy M. Cohn
1
, Oleg Gusikhin
2
and David Perner
3
1
Department of Industrial and Operations Engineering, University of Michigan, Ann Arbor, MI, 48109 U.S.A.
2
Research and Advanced Engineering, Ford Motor Company, Dearborn, MI, U.S.A.
3
Ford Motor Company, Dearborn, MI, U.S.A.
Keywords:
Vehicle Routing Problem, Heterogeneous Feet, Heuristics.
Abstract:
In the classical Vehicle Routing Problem (VRP) literature, as well as in most VRP commercial software
packages, it is commonly assumed that all vehicles are identical in their characteristics. In real-world problems
however, this is often not true. In many cases, fleets are made up of different vehicle types, which may vary by
size, engine/fuel type, and other performance-impacting factors. Even in a homogeneous fleet, vehicles often
differ by age and condition, which can greatly impact performance. Our research was specifically motivated
by cases where the fleet contains vehicles that not only vary in performance, but this variation is a function of
the arc type, such that a given vehicle might have lower cost on some arcs but higher cost on others. We refer
to this as the Hybrid Fleet Vehicle Routing Problem (HFVRP). We propose two heuristic methods that take
into account the vehicle-specific cost structures. We provide computational results to demonstrate the quality
of our solutions, as well as a comparison with a Genetic Algorithm (GA) based method seen in the literature.
1 INTRODUCTION
In this paper, we present models and algorithms for
solving the Hybrid Fleet Vehicle Routing Problem
(HFVRP). In the traditional VRP, a collection of iden-
tical vehicles must be routed so as to visit every cus-
tomer in a given set while minimizing transportation
cost; it is assumed that the cost to traverse an arc be-
tween any pair of customers is the same for all vehi-
cles in the fleet. The HFVRP is a variation of VRP in
which vehicles in the fleet may differ, and we allow
the arc cost to vary by vehicle type.
HFVRP has applicability in many real-world con-
texts. It is quite common, for example, that vehi-
cles within a given fleet will vary in age and thus in
fuel efficiency (and associated cost). Moreover, fleet
managers in many industries are gradually moving
towards more fuel-efficient, environmentally-friendly
vehicle types within their fleet. As older vehicles with
traditional combustion-based engines are retired, they
are being replaced with hybrid or electric vehicles.
Not only do these vehicle types vary in efficiency,
but this variation may depend on driving conditions
– one vehicle may be more efficient in city driving,
for example, while another is more efficient in high-
way driving. Furthermore, in some countries, elec-
tric vehicles are given privileges like being allowed
to pay less toll. In such cases, no one vehicle type
will be Pareto-dominant over the others. Thus, the
extension from VRP to HFVRP is not only in deter-
mining which vehicle type to place on which routes
but also in actually designing the routes to leverage
the strengths of the different vehicle types (Gusikhin
et al., 2010).
VRP is known not only to be NP-hard in theory
(the Traveling Salesman Problem is a special case of
VRP, in which there is only one vehicle to be sched-
uled), but also to often be computationally challeng-
ing in practice as well. It is therefore frequently
solved with heuristics, as we discuss in Section 2.
However, these heuristics often rely on approaches
that target the minimization of total mileage traveled
in the system. In HFVRP, circuitous mileage may lead
to better matching of vehicle types to driving condi-
tions, and thus the solution with minimum total dis-
tance traveled may not be the minimum-cost solution.
In this research, we begin by posing an ex-
plicit mathematical programming approach to solv-
ing HFVRP, and demonstrate the computational chal-
lenges of this approach. We then introduce two
heuristics for solving this problem, one which can be
solved very quickly and without the use of any com-
mercial solvers, and the other which can be used in
contexts where there is more run time – and access
69
Peng F., M. Cohn A., Gusikhin O. and Perner D..
Algorithms for the Hybrid Fleet Vehicle Routing Problem.
DOI: 10.5220/0005422600690077
In Proceedings of the 1st International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS-2015), pages 69-77
ISBN: 978-989-758-109-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

to a commercial mixed integer programming solver
– available. We then provide comparison with a GA
based algorithm, and experiments to gain insights into
both the computational performance and the solution
quality.
The contribution of this research is in: investi-
gating an important variation of the classical VRP
with real-world relevance; identifying structural chal-
lenges that impact the tractability of this problem;
presenting heuristic approaches to find quality solu-
tions in tolerable run times; and conducting computa-
tional experiments to assess performance and solution
characteristics.
2 MOTIVATION AND
LITERATURE REVIEW
The VRP is a classical problem that has been studied
extensively in the literature. Given a fleet of iden-
tical vehicles and a group of customers that need to
be served, VRP seeks the best assignment of routes
to vehicles such that all customers are covered while
the overall cost (usually measured in distance trav-
eled) is minimized. This problem was first introduced
some fifty years ago (Dantzig and Ramser, 1959).
Since then, many aspects of the problem have been
extensively studied (Toth and Vigo, 2001; Baldacci
et al., 2008; Laporte, 2009). VRP is not only the-
oretically interesting but also has broad applicability
in real-world practices, from transportation, distribu-
tion and logistics to scheduling (Baldacci et al., 2010;
Tahmassebi, 1999).
In practice, exact solutions to VRP can typically
only be obtained for relatively small sized problems
(Hasle and Kloster, 2007), with problems having even
as few as a couple of hundred customers often not
guaranteed to be solvable. Therefore a myriad of con-
struction heuristics have been developed to tackle this
problem, including the savings heuristic (Clark and
Wright, 1964; Desrochers and Verhoog, 1991), giant-
tour based heuristic (Golden et al., 1984), and many
augmented methods (Li et al., 2007; Salhi and Rand,
1993).
Many variants of the classical VRP have been in-
vestigated as well. For example, in the capacitated
version of VRP, each vehicle can only carry a lim-
ited amount of goods (Baldacci and Mingozzi, 2009;
Campos and Mota, 2000; Ralphs et al., 2003). In
the VRP with time windows, some or all of the cus-
tomers/depot can accept delivery only during a spec-
ified time period (de Oliveira and Vasconcelos, 2010;
Kim et al., 2006; Kritikos and Ioannou, 2010; Li et al.,
2010). In VRP with stochastic supply/demand, sup-
ply/demand are not deterministic but have some vari-
ability (Novoa and Storer, 2009).
We are interested in a variation of VRP that
we call the Hybrid Fleet Vehicle Routing Problem
(HFVRP). Unlike VRP, HFVRP does not assume that
all vehicles have identical characteristics. Variants
of HFVRP have appeared in the literature in vari-
ous forms and other various names, such as the het-
erogeneous vehicle routing problem (Choi and Tcha,
2007), the fleet size and mix vehicle routing problem
(Golden et al., 1984), mix fleet vehicle routing prob-
lem (Wassan and Osman, 2002), etc. These usually
differ in whether fixed cost is considered, and whether
the fleet size is limited. Various solution heuris-
tics have been proposed for this family of problems.
For example, Taillard (Taillard, 1999) first solved the
VRP problem for each vehicle type, then use a col-
umn generation-based approach to generate and store
an augmented set of routes, then within this set of
routes solve a set partitioning problem to obtain the
final solution. Choi and Tcha (Choi and Tcha, 2007)
performed column generation on the case where a
customer can be visited more than once, where a dy-
namic programming approach was used to solve the
sub-problems and find new columns. Meta-heuristics
have also been explored: Ochi et al. (Ochi et al.,
1998) used the petal genetic algorithm; Wassan and
Osman (Wassan and Osman, 2002) and Tarantilis et
al. (Tarantilis et al., 2008) applied tabu search method
to this problem.
Our interest is in the specific version where the
cost of traversing an arc varies by vehicle, and the
time/length of the route is limited (this problem is
sometimes referred to as the Heterogeneous VRP with
Vehicle Dependent Routing Costs (Baldacci et al.,
2008). These conditions are almost always the sit-
uation in practice – different vehicles have different
engines and thus different fuel efficiency; even within
a fleet of the same vehicles, age can sometimes cause
fuel efficiency to vary substantially. Such problems
are particularly challenging because cost is no longer
so directly tied to distance. Instead, we might be will-
ing to travel circuitous mileage if that excess mileage
led to the use of lower-cost arcs.
Being a generalization of VRP, HFVRP is an NP-
hard problem, and in industrial applications it is in
general solved heuristically. One approach would be
to start by assuming a common cost, across all vehi-
cles, for each given arc, and solve the traditional VRP
using known heuristics. Then, in a second phase, the
true cost of assigning each vehicle to each of the cho-
sen routes could be calculated and the actual matching
of vehicles to routes could be done optimally. How-
ever, this can lead to sub optimal solutions, because of
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
70

the fact that the shortest distance routes are no longer
necessarily the cheapest, and that the routes good for
one vehicle may be bad for another.
Therefore we need to develop new heuristics that
specifically address the challenges of HFVRP. In the
remainder of the paper we present first an exact for-
mulation, then two heuristics: a randomized greedy
heuristics and a set-partitioning based approach. Fi-
nally we present computational results to compare the
heuristics and identify appropriate contexts for the use
of each.
3 FORMULATIONS AND
HEURISTIC METHODS
3.1 Connection Based Formulation
We begin by presenting a connection based approach
to solving HFVRP. Note that the same technique can
also be used in formulating problems such as capac-
itated vehicle routing (Golden et al., 1984; Baldacci
and Mingozzi, 2009). Let T be the set of vehicle type
indices, N be set of nodes, where node 0 is the depot,
and let N
0
= N\{0} be the set of all customer nodes.
We use variables x
t
i j
to denote whether a vehicle of
type t travels directly from node i to j, i, j ∈ N,t ∈ T .
Moreover, let M
t
be the number of routes vehicles of
type t ∈ T can serve. This restriction stems from the
fact that drivers have only limited work time available
in a given period. M
t
is simply the number of vehicles
of type t if each driver can drive only one trip over the
time horizon under consideration. We use Q
t
to repre-
sent the length of time a driver can spend working for
vehicle t ∈ T , and use d
t
i j
to denote the time it takes
for vehicle of type t to travel from node i to j. Finally,
let c
t
i j
be the cost of traveling from customer i to j,
i, j ∈ N. c
t
ii
= 0 ∀i ∈ N. HFVRP can be formulated as:
(C) minimize
∑
t∈T
∑
i∈N
∑
j∈N
c
t
i j
x
t
i j
subject to:
∑
t∈T
∑
i∈N
x
t
i j
= 1 j ∈ N
0
(1)
∑
j∈N
0
x
t
0 j
≤ M
t
t ∈ T (2)
∑
i∈N
x
t
i j
=
∑
i∈N
x
t
ji
t ∈ T, j ∈ N (3)
∑
i∈S
∑
j∈S
x
t
i j
≤ |S| −1 ∀S ⊂ N
0
,|S| ≥ 2 (4)
x
t
i j
∈ {0,1} i, j ∈ N,t ∈ T (5)
Here Constraints (1) ensures that each customer is
covered. Constraints (2) specify that no more than the
maximum number of each vehicle type can be used.
Flow conservation constraints (3) specify that for each
node, any vehicle entering this node must also leave.
Here (4) helps eliminate subtours in the solution. In
addition, to impose the route length restriction, con-
sider a path p of k
p
nodes:
n
p
1
→ n
p
2
→ ...,→ n
p
k
p
,
if for vehicle t ∈ T , a route starting from the depot that
traverses the path and returns to the depot violates the
route length restriction, in other words:
k
p
−1
∑
j=1
d
t
n
p
j
,n
p
j+1
> Q
t
,
but removing either end points does not, we call such
path a minimal violating path (MVP). We include one
constraint:
k
p
−1
∑
j=1
x
t
n
p
j
,n
p
j+1
≤ k
p
− 1 (6)
for each MVP to ensure no route takes longer than Q
t
.
Note that here we implicitly assume it is always faster
to go directly between two nodes than through a third
node).
This formulation can also be applied to HFVRP
with vehicle-dependent capacities, in which case we
can use Q
t
to represent the capacity of vehicle t ∈ T ,
and d
i j
to represent the load at node j for all i. As
is often the case with VRP, we have observed signif-
icant fractionality in our computational experiments,
leading to very slow convergence of the branch-and-
bound tree and/or incompletion due to running out of
memory. For example, we tested an instance with
58 customers and 4 vehicle types. After solving for
more than 15 hours with Cplex version 12.1 on a Mac
Pro with two 2.8GHz Intel Xeon CPU and 10Gb of
RAM, 161400 nodes of the branch-and-bound tree
had been explored with 160031 nodes still pending,
and no integer-feasible solutions had yet been found.
3.2 Greedy Heuristic
The lack of efficient methods to solve the mixed inte-
ger programming (MIP) formulation for all but fairly
small problem instances forces us to investigate in
heuristic approaches. We next present a method that
can find high quality solutions quickly for many prob-
lem instances. As illustrated in Figure 1, this heuris-
tic (Heuristic 1) can be summarized as a randomized
greedy algorithm. The algorithm works as follows:
1. if no customer is outstanding, stop; otherwise
identify the smallest cost from all vehicles to all
outstanding customers, without loss of generality,
say customer i, vehicle number j with cost c
AlgorithmsfortheHybridFleetVehicleRoutingProblem
71
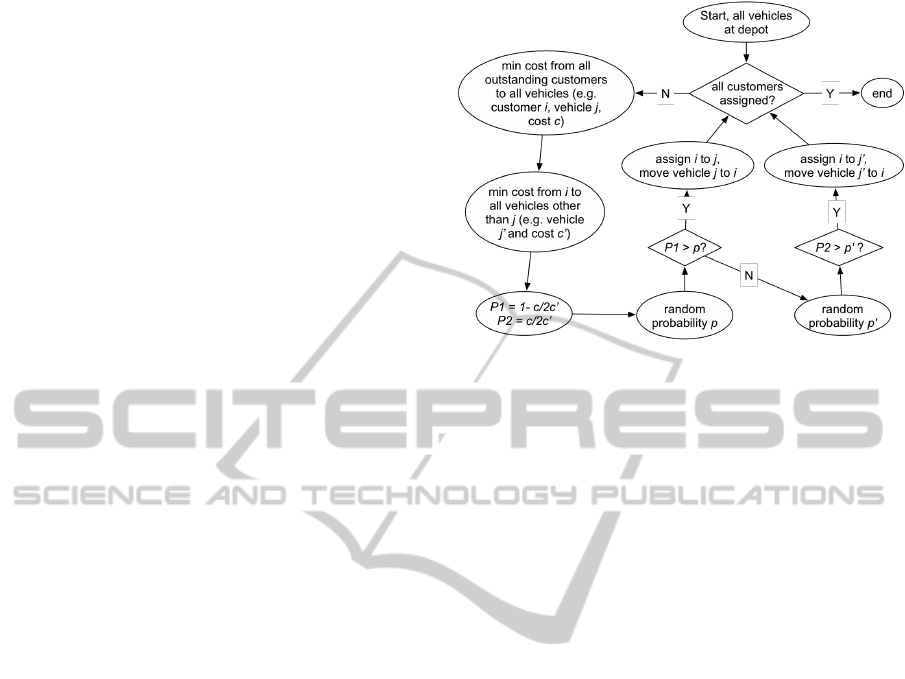
2. find the second smallest cost from i to all vehicles,
record vehicle number j
0
, and cost c
0
3. for j, accept customer i with probability P
1
= 1 −
c/2c
0
and reject i with probability 1 − P
1
, so that
the smaller c is compared to c
0
, the bigger chance
j will be selected to serve i. On the other hand if
c = c
0
, or the costs of using j and j
0
are equivalent,
the probability becomes 1/2;
4. if customer rejected in 3), it is then assigned to
vehicle j
0
with probability P
2
= c/2d
5. if the customer is assigned to neither vehicles, the
process restarts, and in the immediate next itera-
tion, i will not be considered for selection to avoid
repeating the same situation; otherwise, move the
chosen vehicle to i and go to 1).
This approach has certain resemblance to the greedy
heuristic, because priority is always given to the as-
signment with the smallest arc cost. In every stage
of the algorithm, we keep track of the cumulative ser-
vice time of each vehicle, and returns a vehicle to the
depot if no more assignment is possible.
Each iteration of the algorithm takes very little
time, so we can run it many times and keep the best
solution. We will provide empirical studies in Section
4. We also emphasize that this is an approach that can
be implemented fairly easily, and does not require the
use of an underlying MIP solver, thus has great value
for many small fleet managers with limited resources
for sophisticated implementations.
Nonetheless, the randomized approach clearly
runs the risk of sub-optimal solutions. In particular,
the number of feasible routes is exponentially large,
with only a small fraction of these being generated in
the randomized runs. This therefore motivates us to
consider a hybrid approach, blending the route-based
approach with an underlying MIP structure for com-
bining routes effectively, with the aim of being able to
find higher-quality solutions when more sophisticated
implementations are viable.
3.3 Route Based Formulation
In some cases, when more time is allowed to find
good solutions and more sophisticated technology is
available, we can expand our idea to leverage the
strength of an optimization-based approach, and take
advantage of the randomized approach to reduce the
problem size and improve tractability. We present the
route-based model (also referred to as the composite
variable model (Armacost et al., 2002; Barlatt et al.,
2009)). We need the following additional notations:
• R
t
: set of possible routes of customers that can be
served by a vehicle of type t;
Figure 1: Flow chart for the greedy heuristic.
• w
rt
: binary variable that equals 1 if and only if
route r ∈ R
t
is served by a vehicle of type t ∈ T ; 0
otherwise
• C
rt
: cost associated with assigning route r ∈ R
t
to
a vehicle of type t ∈ T
• δ
ri
: binary indicator of whether a node i ∈ N
0
is
covered by a route r ∈ R
t
;
The route-based model can then be formulated as
follows:
(S) minimize
∑
t∈T
∑
r∈R
t
C
rt
w
rt
subject to:
∑
t∈T
∑
r∈R
t
δ
ri
· w
rt
= 1 i ∈ N
0
(7)
∑
r∈R
t
w
rt
≤ M
t
t ∈ T (8)
w
rt
∈ {0,1} r ∈ R
t
,t ∈ T
Here constraint (7) ensures that each customer is cov-
ered by one and only one route. Constraint (8) forces
the number of vehicles of each type used to be no
more than the total number of that type.
Observe that if we were to enumerate all routes,
solving this problem would lead to an optimal solu-
tion. In reality, this is impractical for all but very
small instances. Techniques such as column genera-
tion and branch-and-price (Barnhart et al., 1998) may
be applied to problems like this, and iteratively gen-
erate only routes that appear promising. However, the
problems for finding such routes are essentially VRP
type and NP-hard. In the Appendix, we show that for-
mulation (S) is stronger than (C), and it is therefore
advantageous to work with (S).
We leverage the speed of the randomized ap-
proach from Section 3.2 with the power of the route-
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
72

based formulation above to improve the solution qual-
ity. First we run the randomized heuristic for a large
number of iterations. Instead of keeping only the set
of routes with the smallest cost, all routes generated
in each iteration are put into a pool of routes. Once
the route generation is finished, we will have many
candidate routes that are cost efficient. Then we for-
mulate problem (S) with the poll of candidate routes,
and solve it to find the best route combination.
4 RESULTS AND DISCUSSION
4.1 Baseline — Genetic Algorithm
In order to provide a comparison for the proposed
algorithm against an existing class of algorithms, a
genetic algorithm (GA) (Holland, 1975) was devel-
oped. GA is suitable for a wide range of combinato-
rial problems, including VRP. Recent applications of
the GA to various VRP problems have shown its com-
petitiveness with other heuristic techniques in both
computation time and quality (Baker and Ayechew,
2003). Our implementation of the GA is based on the
“pure GA” described in Baker and Ayechew (Baker
and Ayechew, 2003). In this approach, the problem is
decomposed into two steps. The first, controlled by
the GA, assigns customers to individual vehicles and
over time moves the solution space to be less infea-
sible and lower in cost. Since this does not establish
the order in which customers assigned to a vehicle
are to be visited, a 2-opt algorithm (Lin et al., 1965)
is employed to solve the corresponding TSP for each
individual vehicle.
Our GA implementation is performed in Matlab
on a Windows 7 machine with an Intel Core i5-
2520M processor at 2.5GHz and 8GB RAM. In or-
der to test the quality of the developed algorithm, sev-
eral test datasets were chosen from branchandcut.org,
themselves cases from published articles. The results
for these experiments, with the alphanumeric naming
convention given, are shown in Table 1. Moreover, we
considered one more dataset that was extracted from
the actual daily service routes of a food-gathering
company. We randomly selected five of their exist-
ing routes (spanning 58 customers) as well as the ve-
hicles serving these routes, calculated the travel time
between each pair of locations and compiled this into
a travel-time matrix. To obtain cost information, we
used average costs per mile for each individual ve-
hicle (this information can be obtained by multiply-
ing the fuel consumption per mile and corresponding
fuel price. One of the methods for accurate fuel con-
sumption estimation is presented in Kolmanovsky et
al. (Kolmanovsky et al., 2011). We assume the maxi-
mum work time for a vehicle/driver is eight hours.
Table 1: Performance of GA solution vs. the best known
solution on test cases.
Case Best sol. GA sol. Difference
A-n37-k5 669 731.9 9.41%
E-n23-k3 569 569.7 0.13%
E-n30-k3 534 557.8 4.47%
P-n16-k8 450 451.9 0.43%
P-n55-k8 588 677.8 15.27%
58-Node N/A 187.1 N/A
4.2 The Value of Explicitly Considering
Heterogeneous Arc Costs, and Our
Heuristics Compared with the GA
In current practices, HFVRP is often solved using a
single cost across all vehicles for each arc, for ex-
ample, the minimum cost, maximum cost, or aver-
age cost. Once the routes have been constructed, they
are then assigned to individual vehicles and the true
costs of assigning vehicles to routes can be accurately
calculated. In this experiment, we consider the value
of considering the true (vehicle-specific) costs explic-
itly when designing the vehicle routes. The following
experiments were performed with c++ on a Mac Pro
with two 2.8GHz Intel Xeon CPU and 10Gb of RAM.
The food-gathering company data is a simplifica-
tion that assumes Pareto dominance across vehicles –
that is, if Vehicle A is more cost-effective on one arc
than Vehicle B, then it will be more cost-effective on
all arcs. This is often not the case and, in fact, the
motivation for our research comes from cases where
this is not true. Thus, we generated three additional
instances that are not Pareto-dominant. Cost pertur-
bation was done by multiplying each entry in the cost
matrix by a random number. For slight cost pertur-
bation, the random number was uniformly taken be-
tween 0.8 and 1.2; for medium cost perturbation, the
random number was uniformly taken between 0.5 and
1.5; and for large perturbation, the random number
was uniformly taken between 0.3 and 1.7.
For each of these four instances, we solve the
HFVRP four times. In the first, we apply the solver-
free heuristic from Section 3.2 (H1), using the aver-
age cost data (i.e., for each arc, we take the average
across all vehicle types for that arc). After construct-
ing the routes, we then assign them to specific vehi-
cles: the most fuel-efficient vehicle gets the longest
route, the second most fuel-efficient vehicle gets the
AlgorithmsfortheHybridFleetVehicleRoutingProblem
73
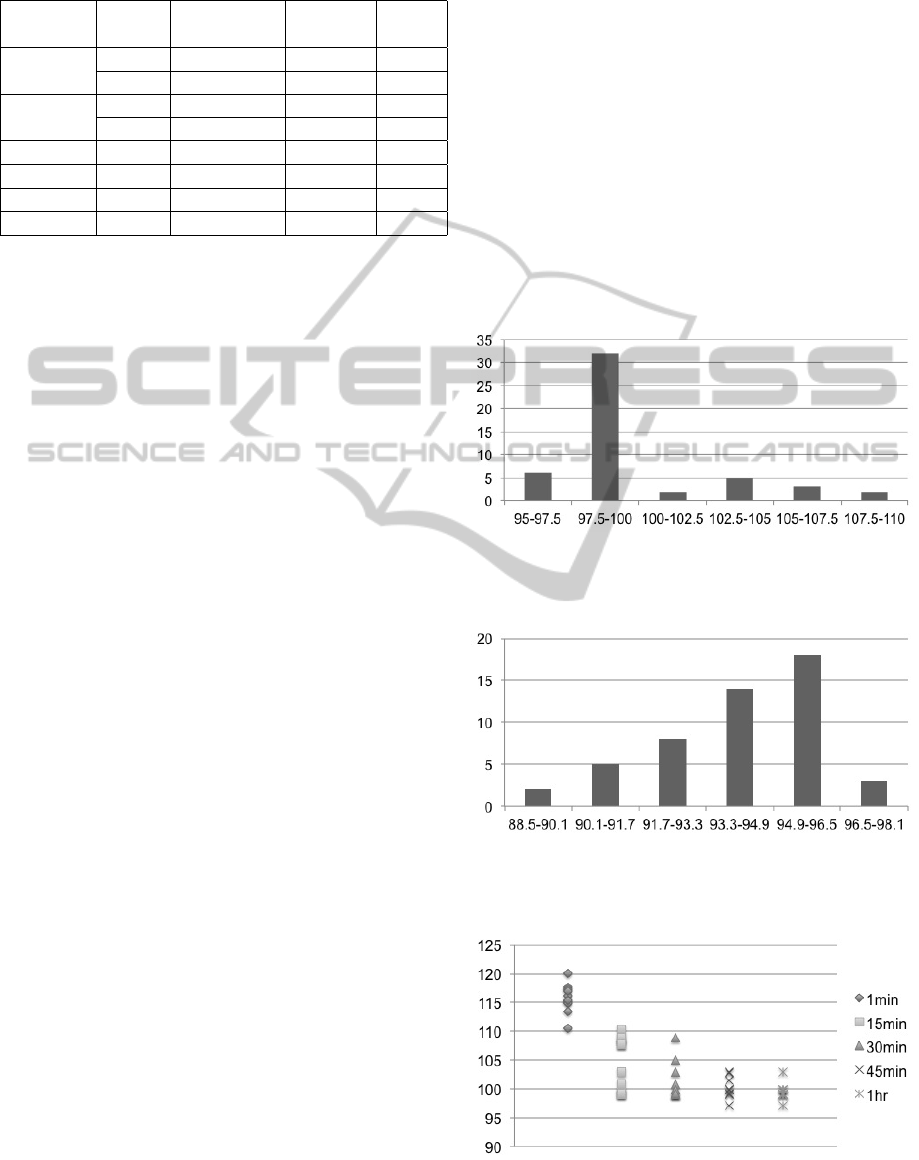
Table 2: Absolute and relative costs of solutions from dif-
ferent cost structure between VRP and HFVRP.
Pareto Low None- Medium High
Pareto
H1 with 150 152 153 122
avg. cost 104% 107% 124% 132%
H1 with 149 145 126 95
true cost 103% 102% 103% 103%
H2 with 146 145 142 123
avg. cost 101% 102% 116% 133%
H2 with 145 142 123 93
true cost 100% 100% 100% 100%
second longest route, etc. Fuel efficiency is measured
by average fuel cost across all arcs. Finally, we com-
pute the final cost using each vehicles specific arc
costs. In the second approach, we apply Heuristic 1
using the true arc costs within the heuristic. In both
of these two approaches, we set a one-hour time limit
on run time. In the third approach, we use the solver-
based heuristic from Section 3.3 (H2) with the aver-
age cost data. In the fourth, we use the true cost data.
For both solver-based heuristic runs, we use 100,000
randomly generated columns.
Results appear in Table 2. Observe that in all four
instances, for either heuristic, incorporating true costs
in the initial route construction reduces cost (by as
much as 33% in one instance). This shows that, with
the same algorithm, explicitly considering the cost of
individual vehicles provides an advantage over using
an uniform cost for all vehicles in the route generation
process. Moreover, Heuristic 2 always achieves bet-
ter solutions compared with Heuristic 1 on the same
datasets, which is no surprise given the much larger
set of routes available for selection in the set partition-
ing model. Furthermore, compared to results in Table
1, all four implementations of our heuristics outper-
formed the GA, sometimes by as much as 22%.
It is not surprising that the additional value of ap-
plying our approaches improves as the data becomes
less Pareto-dominant. We therefore focus on the most
highly non-Pareto instance for the remainder of our
computational experiments.
4.3 The Effect of Randomness/heuristic
Parameters on Performance
Because our two heuristics both have significant ran-
dom components, we next test to see the variation in
outcomes.
Returning to the complete data set (again with the
least-Pareto dominant arc costs), we apply solver-free
Heuristic 1 fifty times using a run time limit of one
hour for each run. Figure 2 shows the variation in ob-
jective value. Note the limited range in solution val-
ues. We repeat the previous experiment using solver-
based Heuristic 2 with a limit of 100,000 columns.
Results appear in the Figure 3.
Recognizing that the solution quality of the
heuristics depends in part on the algorithmic param-
eters, we conduct the following experiments: we run
the solver-free heuristic with five different time limits:
1 minute, 15 minutes, 30 minutes, 45 minutes, and 60
minutes. For each time limit, we run ten random in-
stances of the heuristic. Results are displayed in Fig-
ure 4. Observe that increased runtime improves per-
formance both in reducing objective value and varia-
tion between individual tests.
Figure 2: Histogram of objective values from 50 runs of
heuristic 1 using true cost.
Figure 3: Histogram of objective values from 50 runs of
heuristic 2 using true cost.
Figure 4: Objective values from heuristic 1 under different
time limits, 10 runs for each instance.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
74
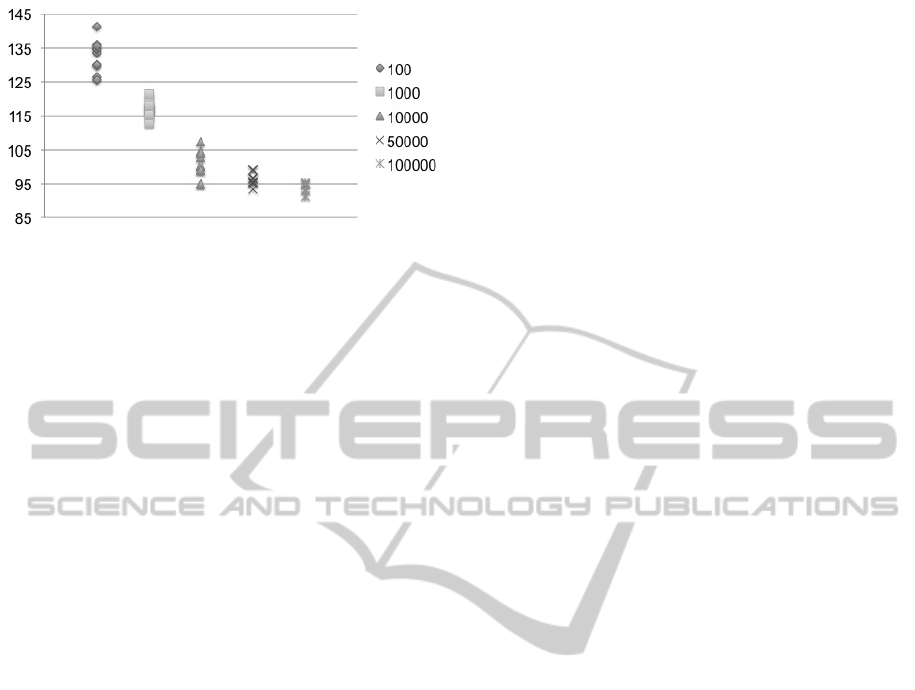
Figure 5: Objective values from Heuristic 2, with different
number of starting routes, 10 runs for each instance.
Finally, we run the solver-based heuristic with 100,
1,000, 10,000, 50,000, and 100,000 columns. For
each column limit, we run ten random instances of the
heuristic. Results are displayed in Figure 5. Clearly,
there is benefit in increasing the number of columns,
with both minimum value, the average value, and the
variance all decreasing as the number of columns in-
creases.
5 CONCLUSIONS AND FUTURE
RESEARCH
Variations in vehicle type and efficiency are found
in virtually every vehicle fleet in operations. With
the current push towards more fuel-efficient and
environmentally-friendly vehicles, even greater vari-
ations are being observed, as fleet operators are grad-
ually replacing older vehicles with new vehicles that
that vary substantially from the original fleet compo-
sition.
Even the homogeneous-fleet version of VRP is of-
ten a difficult problem to solve in practice, and heuris-
tics must be employed to find high-quality solutions
quickly. We have observed that many of the heuristic
approaches used in traditional VRP (which are often
focused on minimizing total distance traveled within
the solution) are not well-suited to HFVRP, where ex-
plicitly considering the differences in the cost struc-
ture and matching vehicle types to driving condi-
tions is critical (especially when no one vehicle type
demonstrates Pareto dominance over all the others).
We have therefore identified, implemented, and
analyzed three different approaches to gain insight
into solving this challenging and important real-world
problem. We start with an exact approach; not sur-
prisingly, this approach is only tractable for prob-
lem instances of very limited size or special struc-
ture. We next consider a greedy approach that can
quickly and easily be implemented, as well as hav-
ing very fast run times. This approach shows great
promise for those environments in which the time
to solve problem instances is limited, as are the re-
sources and IT/optimization capabilities of the fleet
manager. Finally, we extend this randomized ap-
proach into a hybrid heuristic that incorporates the
randomization within an optimization-based frame-
work, typically leading to higher-quality solutions
without a significant increase in run-time. Both of
our heuristic approaches outperformed the genetic al-
gorithm in solving a real-world HFVRP problem in
our experiments.
This research is only an initial foray into the study
of this complex problem. Several promising avenues
of investigation remain. The first is to replace the
randomization component of the route-based prob-
lem with an optimization-based column generation
routine, where the subproblems are solved with spe-
cialized VRP algorithms (this is also referred to as
price-and-branch). The second is to extend HFVRP to
some of the other characteristics commonly observed
in real-world applications of VRP such as time win-
dows and capacity constraints. Finally, we observe
that VRPs are typically assumed to be additive – i.e.
the cost of a route is simply the sum of the individual
costs of the arcs comprising that route. In the case
of certain vehicle types, this assumption is not realis-
tic. Consider a vehicle that picks up different loads at
different locations, as the loads accumulate the mass
of the vehicle and correspondingly fuel consumption
change, which depends on the arcs traversed thus far.
We thus propose to investigate a variation of HFVRP
in which the cost of traversing a route may be non-
additive relative to the individual arc costs.
ACKNOWLEDGEMENTS
This research was supported by the National Science
Foundation under Grant SBIR-I 1013832.
REFERENCES
Armacost, A., Barnhart, C., , and Ware, K. (2002). Compos-
ite variable formulations for express shipment service
network design. Transportation Science, 35(1).
Baker, B. and Ayechew, M. (2003). A genetic algorithm for
the vehicle routing problem. Computers & Operations
Research, 30(5):787–800.
Baldacci, R., Bartolini, E., and Laporte, G. (2010). Some
applications of the generalized vehicle routing prob-
lem. Journal of the Operational Research Society,
61:1072–1077.
AlgorithmsfortheHybridFleetVehicleRoutingProblem
75

Baldacci, R., Battarra, M., and Vigo, D. (2008). Routing
a heterogeneous fleet of vehicles. The Vehicle Rout-
ing Problem: Latest Advances and New Challenges,
43:3–27.
Baldacci, R. and Mingozzi, A. (2009). A unified exact
method for solving different classes of vehicle rout-
ing problems. Mathematical Programming, Series A,
(120):347–380.
Barlatt, A., Cohn, A., Fradkin, Y., Gusikhin, O., and Mor-
ford, C. (2009). Using composite variable modeling
to achieve realism and tractability in production plan-
ning: An example from automotive stamping. IIE
Transactions, 41(5):421–436.
Barnhart, C., Johnson, E. L., Nemhauser, G. L., Savels-
bergh, M. W., and Vance, P. H. (1998). Branch-and-
price: Column generation for solving huge integer
programs. Operations research, 46(3):316–329.
Campos, V. and Mota, E. (2000). Heuristic procedures for
the capacitated vehicle routing problem. Computa-
tional Optimization and Applications, 16:265–277.
Choi, E. and Tcha, D.-W. (2007). A column generation ap-
proach to the heterogeneous fleet vehicle routing prob-
lem. Computers and Operations Research, 34:2080–
2095.
Clark, G. and Wright, J. W. (1964). Scheduling of vehicles
from a central depot to a number of delivery points.
Operations Research, 12(4):568–581.
Dantzig, G. B. and Ramser, J. H. (1959). The truck dis-
patching problem. Management Science, 6(1):80.
de Oliveira, H. C. B. and Vasconcelos, G. C. (2010). A
hybrid search method for the vehicle routing problem
with time windows. Ann Oper Res, 180:125–144.
Desrochers, M. and Verhoog, T. W. (1991). A new heuris-
tic for the fleet size and mix vehicle routing problem.
Computers and Operations Research, 18(3):263–274.
Golden, B., Addad, A., Levy, L., and Gheysens, F. (1984).
The fleet size and mix vehicle routing problem. Com-
puters and Operations Research, 11(1):49–66.
Gusikhin, O., MacNeille, P., and Cohn, A. (2010). Vehicle
routing to minimize mixed-fleet fuel consumption and
environmental impact. In Proceedings of 7th Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics, volume 1, pages 285–291, Funchal,
Madeira -Portugal.
Hasle, G. and Kloster, O. (2007). Industrial vehicle routing.
Geometric Modelling, Numerical Simulation, and Op-
timization, pages 397–435.
Holland, J. (1975). Adaptation in natural and artificial sys-
tems, university of michigan press. Ann Arbor, MI,
1(97):5.
Kim, B.-I., Kim, S., and Sahoo, S. (2006). Waste collection
vehicle routing problem with time windows. Comput-
ers and Operations Research, 33:3624–3642.
Kolmanovsky, I., McDonough, K., and Gusikhin, O.
(2011). Estimation of fuel flow for telematics-enabled
adaptive fuel and time efficient vehicle routing. In
Proceeding of 11th IEEE International Conference
on Intelligent Transportation Systems Telecommuni-
cations, pages 139–144, St. Petersburg, Russia.
Kritikos, M. N. and Ioannou, G. (2010). The balanced cargo
vehicle routing problem with time windows. Interna-
tional Journal of Production Economics, 123(1):42–
51.
Laporte, G. (2009). Fifty years of vehicle routing. Trans-
portation Science, 43(4):408–416.
Li, F., Golden, B., and Wasil, E. (2007). A record-to-record
travel algorithm for solving the heterogeneous fleet
vehicle routing problem. Computers and Operations
Research, 34:2734–2742.
Li, X., Tian, P., and Leung, S. C. (2010). Vehicle routing
problems with time windows and stochastic travel and
service times: models and algorithm. International
Journal of Production Economics, 125(1):137–145.
Lin, S. et al. (1965). Computer solutions of the traveling
salesman problem. Bell System Technical Journal,
44(10):2245–2269.
Novoa, C. and Storer, R. (2009). An approximate dynamic
programming approach for the vehicle routing prob-
lem with stochastic demands. European Journal of
Operations Research, 196:509–515.
Ochi, L. S., Vianna, D. S., Drummond, L. M. A., and Vic-
tor, A. O. (1998). An evolutionary hybrid metaheuris-
tic for solving the vehicle routing problem with het-
erogeneous fleet. Lecture Notes in Computer Science,
1391:187–195.
Ralphs, T. K., Kopman, L., Pulleyblank, W. R., and Trot-
ter, L. E. (2003). On the capacitated vehicle routing
problem. Mathematical Programming, 94:343–359.
Salhi, S. and Rand, G. K. (1993). Incorporating vehicle
routing into the vehicle fleet composition problem.
European Journal of Operations Research, 66:313–
330.
Tahmassebi, T. (1999). Vehicle routing problem (vrp)
formulation for continuous-time packing hall de-
sign/operations. Computers and Chemical Engineer-
ing Supplement, S:1011–1014.
Taillard,
´
E. D. (1999). A heuristic column generation
method for the heterogeneous fleet vrp. Operations
Research – Recherche op
´
erationnelle, 33(1):1–14.
Tarantilis, C., Zachariadis, E., and Kiranoudis, C. (2008).
A guided tabu search for the heterogeneous vehicle
routing problem. Journal of the Operations Reserach
Society, 59:1659–1673.
Toth, P. and Vigo, D., editors (2001). The Vehicle Routing
Problem. Society for Industrial and Applied Mathe-
matics (SIAM).
Wassan, N. and Osman, I. (2002). Tabu serach variants for
the mix fleet vehicle routing problem. Journal of the
Operations Reserach Society, 53:768–782.
APPENDIX
We denote the LP relaxation to problem (S) as (SL),
and the LP relaxation to problem (C) as (CL).
Theorem. The lower bound generated by problem
(SL) is at least as tight as the lower bound generated
by problem (CL)
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
76

Proof. We first show that, for any feasible solution
to (SL), there is a corresponding feasible solution to
(CL) with the same objective function value. For
any feasible solution, say ˆw, to problem (SL), let
ˆx
t
i j
=
∑
r∈R
t
δ
ri
ˆw
rt
. It is easy to see that (1) and (2) are
satisfied since (7) and (8) are. Moreover, this solution
also satisfies (3), since each route r ∈ R
t
already guar-
antees the flow conservation constraint (3) for all its
nodes. Assuming the connection costs are additive,
the objective function value corresponding to ˆx will
equal the objective value for ˆw. To see that this so-
lution also satisfies (6), first note that since any route
in (SL) satisfies this constraint, the maximum num-
ber of legs a route r can overlap with a MVP p is
k
p
− 1. Therefore along the direction of r, there will
be at least one leg on p, either right before the start or
after the end point of the overlapping section or both,
that is exposed (i.e., not covered by r). Because of
(7), the sum of the flow on the exposed leg is at most
1 − ˆw
rt
. The sum of all “lost” flows on all exposed
legs along p is therefore ≥
∑
r∈R
t
ˆw
rt
≥ 1. The right
inequality holds whenever at least one vehicle of type
t is used. We can show that (4) is satisfied by ˆx in a
similar way.
To complete the second half of this proof, we
show that not all solutions to (SL) are feasible to (CL).
Consider a simple problem with 3 customers besides
the depot and 3 vehicles of the same type. Assuming
that the trip length limit is large enough, a solution
to (CL) can make a round-trip between each pair of
customers with “half” a vehicle (i.e., the weight of
the connection is 0.5 for both legs of the trip). This
solution will satisfy all the constraints in (CL), but
will not have a corresponding solution in (SL) since it
skips the depot altogether.
AlgorithmsfortheHybridFleetVehicleRoutingProblem
77
