
Scenario Development for Successful Aeging with Robot Companions
Katja Richter and Nicola Döring
Media Psychology and Media Design Group, Technische Universität Ilmenau, Ehrenbergstr. 29, 96693 Ilmenau, Germany
Keywords: Healthcare Robots, Independent Living, Active Aging, User-Centered Design, Scenario Development.
Abstract: To illustrate how service-robots for healthcare can support independent living of older people three
normative, narrative scenarios were systematically developed. In the sense of a user-centered design,
scenarios are a promising opportunity to involve the target groups in the development and implementation
process. Each scenario illustrates a different but typical day of an elderly person living with such a robot.
Scenarios intend to encourage a lively but focused discussion of future technologies with different target
groups. The personas (hypothetical but concrete prototypes of user groups describing specific requirements
and usage behavior) were derived from the state-of-the-art concerning the every-day life of older people and
the results of a qualitative interview-study focused on the structures and schedules of the seniors’ daily
routines. Additionally, key dimensions of the scenario space (specification of service-robots, older people
and living environments) as well as descriptors characterizing each dimension, were identified by means of
an exhaustive, systematic literature review and consistency analysis. The paper presents the scenario
development process, the scenarios and their use in evaluation studies.
1 INTRODUCTION
Assistive service-robots offer some potential to meet
occurring challenges in health care caused by severe
demographic changes (Robinson, MacDonald and
Broadbent, 2014). Robots assisting older people to
manage their everyday life need to perform a variety
of tasks, interact flexibly, and adapt to a wide range
of capabilities and health constraints in non-standard
situations and environments (Decker, 2012).
In contrast to the stereotype that older users are
afraid of or hostile towards technology, they are
willing to accept, creatively adapt and integrate the
use of robots in their daily lives if the robot’s
benefits are clearly recognizable, and ensure an
elongated independent life for the older people.
Service-robots for healthcare will be successful,
if requirements, needs and capabilities of older users
are carefully taken into consideration during the
development process (Melenhorst, 2002). Aging is a
very heterogeneous process. Requirements,
resources and daily living differ a lot. It is crucial to
encompass this diversity. „Robots may need to be
specifically tailored to people who may be skeptical
of robot use or reluctant to use them because of the
great jump in technology the robot represents”
(Robinson et al., 2014, p.576).
Although previous research has addressed
seniors’ acceptance of service robots, studies that
focus on autonomously operating robots in seniors’
homes and their long-term use in everyday life are
lacking. Foremost this is due to limited practical
experiences with robots – currently there are only
very few robots available for long-term use in
private homes (Robinson et al., 2014).
The paper presents the systematic development
of three normative, narrative scenarios envisioning
everyday life of older people living with a
companion-type service-robots providing healthcare.
Uses of these scenarios in future evaluation studies
with different target groups are discussed.
2 RELATED WORK
Robots offer various possibilities to enable older
people to live independently and improve their
quality of life (e.g. Robinson et al., 2014). Compared
to computers, tablets or TVs robots provide psycho-
social and instrumental advantages due to
embodiment, anthropomorphism and mobility:
Robots can act as activating, autonomous, mobile
interfaces in a smart-home environment, integrating
various communication services. Thus, robots offer
new opportunities and risks for health, social
participation and interpersonal communication
211
Richter K. and Döring N..
Scenario Development for Successful Aeging with Robot Companions.
DOI: 10.5220/0005429402110218
In Proceedings of the 1st International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AgeingWell-
2015), pages 211-218
ISBN: 978-989-758-102-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

(Torta et al., 2014). Robots may be able to
compensate older people’s declining cognitive
performances, motivate and activate or reduce fears
that result from health problems, e.g. frailty and
falling (Robinson et al., 2014).
Research considering the acceptance of robots
assisting older people in everyday life yields
valuable information concerning the design of robots
and factors influencing human-robot interaction
(Robinson et al., 2014). Theoretical models
(particularly TAM, UTAUT, ALMERE) include
factors like the complexity of technology, problem
solving competences of users and self-efficacy in
competence to use, perceived usefulness, perceived
ease of use, joy of use, or trust (Robinson et al.,
2014). These criteria are influenced by appearance,
personality, appropriate social and emotional
behavior of a robot as well as its adaptability,
individuality and safe and robust functionality.
Older people are looking for robots that match their
aesthetic desires, compensate age-related limitations
and support their functional needs, are a saving of
time and effort, complete undesirable tasks or
complete tasks at a high level of performance (e.g.
Beer et al., 2012).
Nevertheless, older peoples’ perception of what
to expect from a companion-type service-robot
assisting them in their daily routines is limited due to
the lack of experiences (e.g. Broekens, Heerink and
Rosendal, 2009).
The usability and the acceptance of healthcare
robots are often evaluated at a point, when the robot
has already been developed. In contrast, the theory
of social constructivism (Frennert and Östlund,
2014) emphasize that technology is socially
constructed. It is expected that older people will
adapt to robots individually which retroacts on the
design of the technological device.
These theoretical approaches highlight the
general dilemma of technology development: at the
early stages of the developmental processes the
effects and consequences of the use of the
technology for its potential users are difficult to be
estimated. The holistic idea to share life with a
robotic companion is hardly conveyable. In late
stages of the process, consequences appear clearer,
the necessity to adjust requirements might occur, but
it is almost impossible or at least expensive and time
consuming to change the trajectory of development.
(Kok, van Vliet, Bärlund, Dubel and Sendzimir,
2011).
One solution in this situation is scenario
development (Kok et al., 2011). The aim of
developing future scenarios is to understand and
envision possible futures, enable, anticipate and
structure the discussion of thinkable future
situations, and point out alternatives and thus logical
consistent opportunities for technology development
regarding various insecurities (Breuer, Grabowski
and Arnold, 2011). Scenarios are especially useful to
involve different target groups of a future
technology (e.g. older people, their family members,
professional caretakers) in early stages of
technology development.
3 RESEARCH QUESTION
The aim of this study is to develop future scenarios
in order to provide a systematic illustration of
complex questions related to the future:
a) How is it possible to enable successful aging
when older people live with a robotic
companion? Which robot functionalities are
especially useful for different target groups in
their respective home environments?
b) How can the robotic companion be integrated
into everyday life in the most profitable way
possible for all parties involved? When and
how should the robot pro-actively intervene in
different daily routines?
4 METHODOLOGY
Scenario development is a mixed methods approach.
The methodological approach combines knowledge
from various disciplines, including analytical and
descriptive paradigms of traditional science as well
as communicative and participatory approaches
(Breuer et al., 2011).
Scenarios describe hypothetical, but plausible
visions of the future. Scenarios do not intend to
predict the future, but to illustrate thinkable future
possibilities for the future, present alternatives,
logical, and consistent opportunities of technology
development. Additionally they apply, enable and
structure discussions (Breuer et al., 2011).
A scenario is a sketched but concrete, consistent,
(mostly) qualitative, and detailed presentation of a
future situation, embedded in a specific
environment. Scenarios consist of multiple
dimensions. Each dimension involves various key
factors and relevant trends (Breuer et al., 2011).
4.1 Normative, Narrative Scenarios
There are different types of scenarios. In the present
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
212
study three normative, narrative scenarios were
developed. Each scenario specifies different but
typical needs and requirements of older people
living at home (Gaßner and Steinmüller, 2004).
A normative, narrative scenario is foremost used
to establish a link between technology forecast and a
realistic social context. Value-orientations as well as
the intricacies of everyday behavior are explicitly
taken into account (Gaßner and Steinmüller, 2004).
Normative scenarios describe an anticipated,
preferable, visionary future without transgressing the
realm of the possible (Bishop et al., 2007).
Narrative scenarios portray the future “[…] in
the way a science fiction story does – with human
protagonists and a rudimentary plot” (Gaßner
and Steinmüller, 2004, p. 31). Basically a narrative
scenario is a short story of a lived-in daily
experience of older people living with a companion-
type service-robot (Kok et al., 2011).
4.2 Process of Scenario Development
The systematic development of normative, narrative
scenarios is a rigorous process that involves logical,
detailed steps (Breuer et al., 2011). Based on an
inductive process, conclusive stories are derived
from associations of distinct interactional patterns
and reciprocal influences of the descriptors
characterizing the scenario space which determine
the future situation (van Notten, 2005). Before
writing the storyline of the scenario, the scenario
field has to be analyzed.
During this process the key dimensions and
characterizing descriptors are identified. Systematic
Figure 1: Dimensions determining scenario space.
literature review led to an aggregation of descriptors
and contribution of information sources. Therefore,
literature was content analysed regarding the
category of the identified technology (robot, smart
home, enabling technology), its state of development
(commercially available, prototype, future trend), its
acceptance, and (dis-)advantages of usage. Based on
that, descriptors are identified and filtered regarding
their impact (high, low, or no impact) on the
scenario (Breuer et al., 2011).
Afterwards, descriptors are validated by
assessing their consistency to reveal the ones with
high influence on the scenario space (cross-impact-
analysis): Each descriptor is paired with a second
one. The pair is evaluated regarding the question if
one descriptor is totally inconsistent, neutral, or
supporting the incidence of the second descriptor
(Porter, Roper, Mason, Rossini and Banks, 1991).
Further, consistent descriptor-bundles are
determined based on an assessment of the
consistency.
5 SCENARIO SPACE
The scenario space encompasses the employment of
a companion-type service-robot that provides
healthcare functions for older people still living in
their private homes in order to elongate independent
living, increase well-being, promote health, and
assist with tasks of everyday living.
6 KEY DIMENSIONS AND
DESCRIPTORS
Key dimensions and descriptors were obtained
regarding two main issues: 1) the technological
process, i.e. the ongoing increases in the
development of assistive service-robots for
healthcare and 2) the impact of the customer, i.e. the
involvement and integration of older people in the
upcoming development of these robotic assistants
(Breuer et al., 2011).
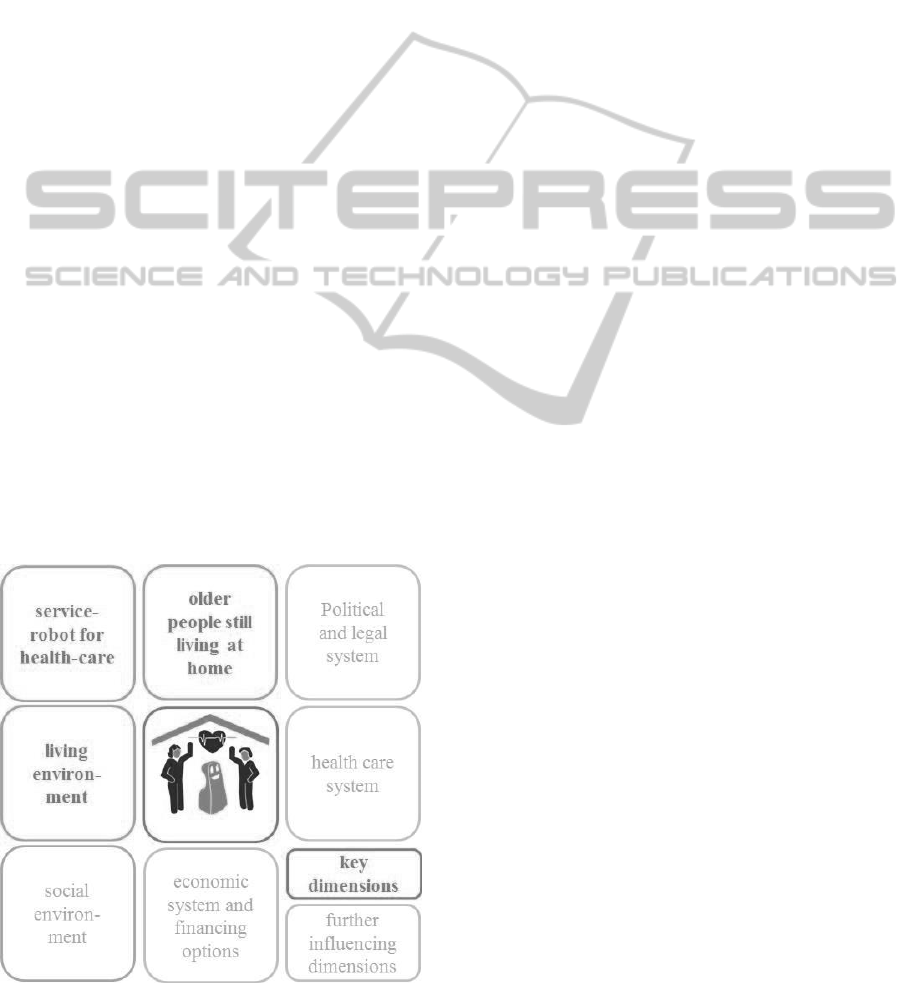
Three key dimensions could be identified: the
technological opportunities of service-robots, special
requirements and needs of older people using such a
robot, and the living environment of the user (figure
1). The subsequent sections summarize the final
characterization of the key dimensions after their
validation and consistency check of the identified
descriptors. Further dimensions influencing the
scenario space were analyzed as well (social
ScenarioDevelopmentforSuccessfulAegingwithRobotCompanions
213
environment, political and legal system, health-care
system, economic system/financing options). Due to
the limited space available a detailed presentation is
waived in this paper.
6.1 Specification of Living
Environment
Manifold technologies are available supporting older
people to retain independence in their private homes.
Smart home technologies provide promising
devices. Table 1 summarizes the specification of the
descriptors defining the future living environment of
older people.
Table 1: Characterization of descriptors defining the key
dimension “living environment”.
descriptor characteristics
outline of
apartment
Apartments are barrier-free, providing
enough room and without stairs or door
sills.
(technical)
equipment in
apartment
Apartments are smart home environments,
equipped with smart electronics to control
windows, doors, lightning, air
conditioning etc., a smart fridge as well as
an alarm system detecting fire, gas or
theft.
in-house
infrastructure
Wifi is available. Exchange and
synchronization of relevant information
between the various smart home devices
is possible.
6.2 Specification of Service-Robots
Though a large variety of service-robots is available
already, most of those devices offer only single
functions or support for a certain functional area. For
holistic support, service robots need to be
multifunctional (Frennert and Östlund, 2014).
Besides, as mentioned in section 2 (Related Work)
manifold factors influence the acceptance of
Table 2: Characterization of descriptors defining the key
dimension “robot”.
descriptor characteristics
mobility Robot can navigate autonomously.
connectivity The robot is connected to smart home
devices via Wifi.
tools to
perceive
environment
The robot is equipped with various sensors
enabling orientation, and detecting and
distinguishing people.
tools to
manipulate
environment
Instruments to measure and monitor vital
signs are available. The robot is equipped
with a tablet and drawer for transportation
and storage.
Table 2: Characterization of descriptors defining the key
dimension “robot” (cont.).
descriptor characteristics
tools for
communi-
cation
There are tools integrated for verbal
communication (speech recognition and
synthesis), nonverbal communication
(gesture recognition, touch recognition,
animated eyes) or paraverbal
communication (e.g. acoustic signals for
warning), as well as a touchable screen and
a remote control.
appearance The robot is of 1.20 m height, with a
friendly, animated face. Its color can be
chosen due to aesthetic desires.
personality The robot is a friendly, intelligent,
teachable, helpful, and extrovert
companion.
behavior The robot is able to behave socially and
emotionally appropriate.
applications
provided for
user
According to requirements, needs, interests
and preferences of the user, applications,
can be executed. The applications
encompass security issues, health-support
(e.g. monitoring vital signs, cognitive and
physical training, medication
management), support to structure daily
living, information services, support of
social communication and inclusion, and
entertainment.
service-robots. A robot providing positive resource
balance, high level of individuality, and support of
values of personal identity, dignity and
independence might be accepted by older people
(Robinson et al., 2014).
Table 2 summarizes the characterization of
descriptors defining a future service-robot for
healthcare for older people who live independently
in their own apartments.
6.3 Specification of Older People
A lack of attention to user needs may be one factor
that explains the limited adoption of many aging-
related technologies. The robotic device needs to
adapt to the individuals’ requirements, habits and
preferences of older people and fit to their everyday
lives (Ballegaar, Hansen and Kyng, 2008). It is
important to consider the users’ current level of
needs (e.g. Beer et al., 2012).
Although the group of older people is very
heterogeneous some abilities improve or stay the
same with age, and others decline, because of a
natural aging process (Ackerman, 2008). There are
typical constraints, that affect most older people at a
certain age: changes in life-style leading to the loss
of healthy habits, diabetes and obesity, that need
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
214

particular attention to dietary habits, mild cognitive
decline and memory difficulties, or vision and
manipulation difficulties, creating barriers to using
technology (Marcellini, 2012).
The social science provide a rich body of
literature about how older people compensate the
change and loss of competences and resources and
deliver insights on understanding the role of objects
and environments, activities that the elderly are
confronted with on a daily basis (Forlizzi, DiSalvo
and Gemperle, 2004). In general, daily living of
older people is structured by habits and routines,
mainly consisting of activities like sleeping, eating,
personal hygiene or housekeeping. Half of everyday
activities are performed at the same place and time.
Due to individual differences regarding needs,
financial or social constraints, lifestyle or goals in
Table 3: Personas.
Elfriede, aged 73, lives alone in a
2-room-appartment after her
husband passed away 4 years ago.
Most of the days she can handle her
arthritis. The decreasing cognitive
abilities are more disturbing for
her. She is enterprising, and loves
b
aking cakes for friends and
family. A typical week is structured
b
y several fixed appointments,
particularly to cultivate her many
social contacts.
Wilhelm, aged 63, divorced, and
living alone in his house. He is
living a healthy and sporty
lifestyle, structuring his days
according to his personal training
plans. Furthermore, he enjoys
flexible, spontaneous activities.
Although he is integrated in a solid
social network, his friends and
family are afraid he might get
lonely.
Horst, aged 93, is living in a 3-
room-apartment with Hildegard.
Horst’s cognitive abilities are
restricted due to dementia.
Moreover, both are suffering from
various severe health restrictions
resulting in limited mobility, harsh
medication and a strictly regulated
day. Regarding personal hygiene,
housekeeping and cooking they
need support. Nevertheless, Horst
is merrily happy, enjoying each
day.
life (Lim et al., 2012), individual interests, abilities,
skills and experiences (Frennert and Östlund, 2014),
timing and content of daily activities are quiet
heterogeneous (Lim et al., 2012).
Currently, only a limited amount of information
is available about the typical structure of older
people's daily routines (Richter and Döring, 2013).
Therefore an explorative, qualitative study was
conducted. A theoretical sample of 12 seniors (7
women, 5 men aged 61 to 85 years; different health
and relationship states, competences, lifestyles and
experiences) were interviewed. The problem-
focused semi-structured interviews were focused on
the structure of everyday life and opportunities to
integrate a robot in that schedule. The interviews
were recorded and fully transcribed and analyzed
using established content analyzes methods (Richter
and Döring, 2013).
Based on the state of the art and the findings of
the interview-study, five personas were derived. A
persona is a hypothetical, fictive user, representing a
prototypical group of users with their distinctive
characteristics and usage behaviors (Mulder and
Yaar, 2007). Table 3 gives a brief summary of the
three personas that vary most, and are therefore
defining the specification of older people regarding
the developed scenarios.
7 SCENARIOS
The three normative, narrative scenarios describe
exemplary but concrete use cases. Each scenario is
based on one of the three personas (section 5.3). The
scenarios are designed in the form of a detailed
calendar entry of a complete day. The activity
descriptions are written in the style of a personal
diary describing how each persona experiences life
with the individually tailored service-robot. In
addition to the calendar-typed diary, a picture and a
brief summary illustrating the core information
concerning the personas’ requirements, their reason
for using a robot and the robots’ essential
functionalities, are presented. The following
paragraphs present the three scenarios.
7.1 „With Se-B, a Truly Supportive
Companion, I Feel Safe and
Protected.“
Elfriede has been living with Se-B (Robotic
Security Buddy) her protective robot-friend for
some years.
(source of image:
Rainer Sturm/
pixelio.de)
(source of image:
Rainer Sturm/
p
ixelio.de)
(source of image:
Moni Stertel /
pixelio.de)
ScenarioDevelopmentforSuccessfulAegingwithRobotCompanions
215
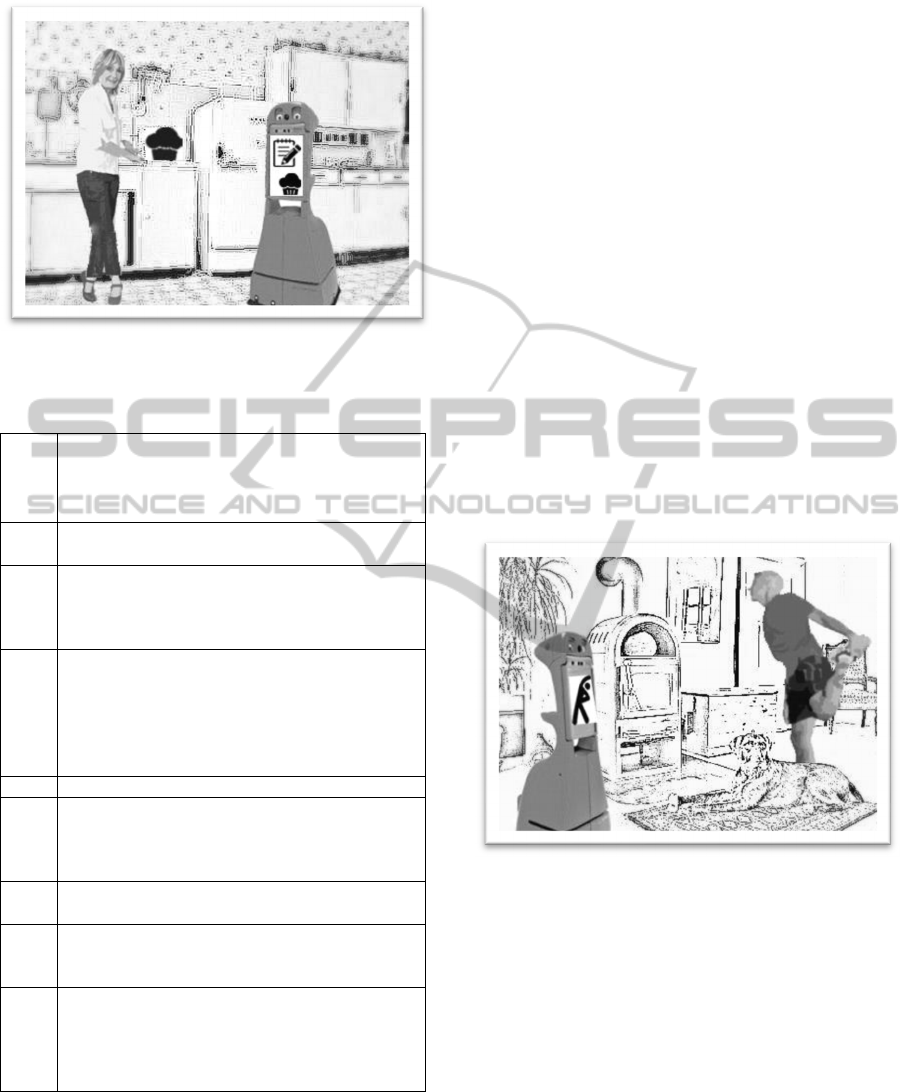
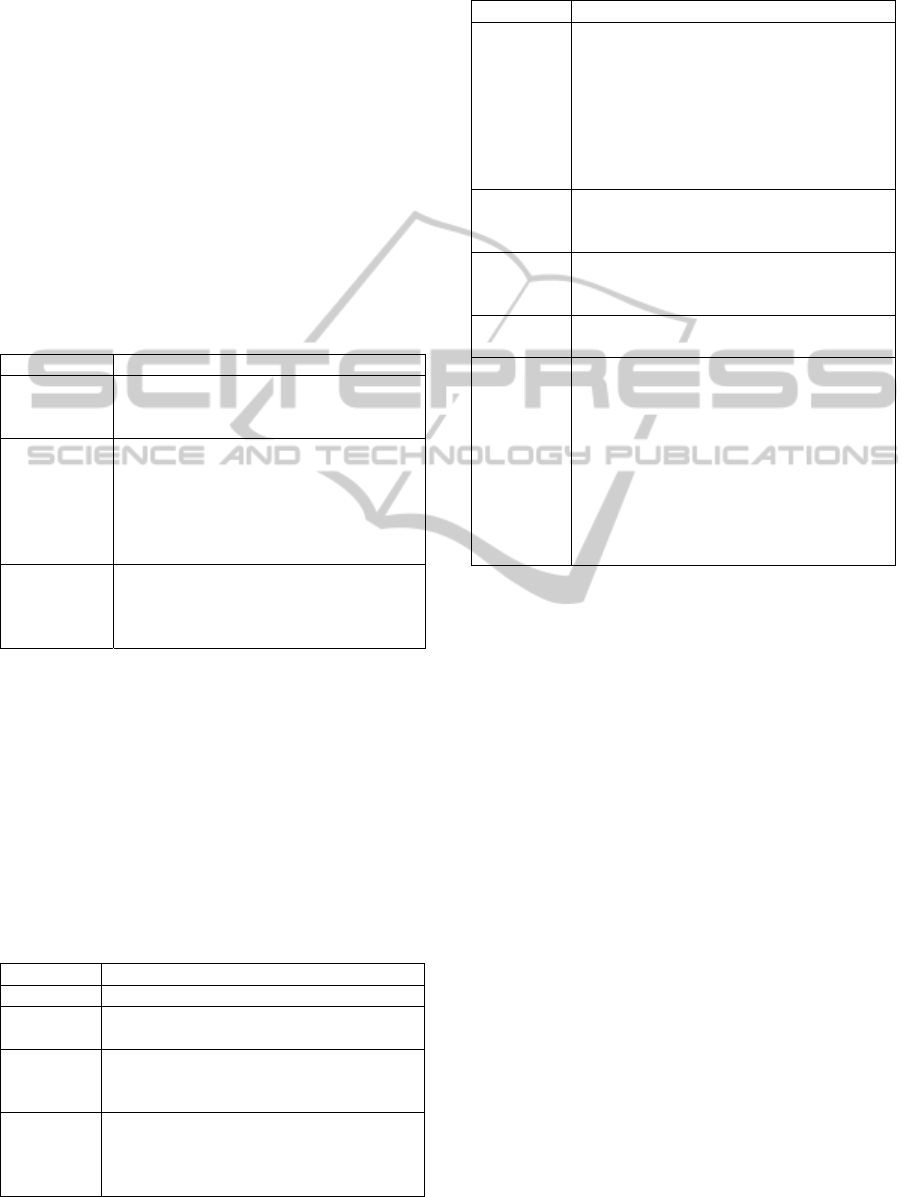
Figure 2: Elfriede baking a cake proposed by Se-B
(authors’ illustration).
Table 4: Extract of a typical day at Elfriede and Se-B.
7:00 Se-B gently wakes up Elfriede. The robot asks if
she feels well while checking her vital signs.
Yesterday Se-B had to call an emergency
because she felt to the floor.
7:20 While Elfriede takes a shower, Se-B prepares the
kitchen table for breakfast.
8:00 Se-B reminds Elfriede to take her medicine and
informs about her appointment with her doctor at
9:30, including an advices which bus to take, and
what Elfriede needs to bring with her.
8:55 Elfriede prepares herself for leaving the house.
Se.B informs her that all windows are closed,
reminds her to take the keys and tells her
farewell: “Call me, if you need help.” As soon as
the door is closed, the robot activates the security
systems, and installs itself at the charging station.
11:00 Se-B heartily welcomes Elfriede back home.
11:15 Guests are announced for the afternoon; Se-B
automatically proposes a wholesome cake-recipe,
including a checklist for preparation and
compiles a custom-tailored shopping list.
19:30 It’s time for the online English course. Se-B
assists her logging into the virtual class-room.
20:15 Instead of training the new vocabulary with the
robot (as usual), Elfriede decides to meet her
fellows in a virtual bar for a little chat.
22:00 Elfriede informs Se-B that she goes to sleep.
That’s the signal for the robot to check the
apartment, lock the front door, activate the
security system, and to leave to its charging
station.
Because of increasing health problems she
decided to install the robot, instead of moving into
an assisted living facility. Meanwhile, Se-B is fully
integrated in her everyday life, assisting her with
organizing her schedule, reminding her of her
medication, keeping her company, keeping her
active and supporting her with her favorite pastime:
baking. Since she got accustomed to Se-B’s
presence, she feels more confident and safe.
Due to limited space, only an extract of the diary
envisioning the daily schedule of Elfriede and Se-B
(table 4) can be presented. For the following two
scenarios, dairies had to be summarized.
7.2 “Pe.T.Ro. Is Motivating Me to Stay
Active and Open-Minded.“
Wilhelm retired one year ago. Since that time his
family and friends regularly complain that he spends
too much time alone. They are worried, he might get
lonely. Wilhelm does not share these concerns. He
just uses every minute to train for a marathon. To
calm his nanny friends down, he agreed to install
Pe.T.Ro (Personal Training Robot). Meanwhile, he
is fond of the companion-type robot, supporting him
to optimize his training. Pe.T.Ro., acquainted him to
online-dating which enables Wilhelm to get to know
women without being observed by his
overprotective friends.
Figure 3: Wilhelm doing stretching exercises after a
running, instructed by Pe.T.Ro (authors’ illustration).
Typically Wilhelm gets up at 7:30 a.m., to
consult Pe.T.Ro., about the best track for his training
run according to condition, weather and training
goal. After Wilhelm is done with his training, he
takes a shower and has breakfast while Pe.T.Ro.
analyzes his training data, checks the calendar for
appointments and co-ordinates further activities for
the day.
7.3 “Ca.R.L. Is Our Window to the
World.”
Horst is aware of his bad health conditions but does
not complain about them. Basically, he is happy: his
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
216

beloved partner Hildegard and Ca.R.L. (Robot to
CAre for and Regulate Life) the sensitive, reliable
assistant lighting up his days. Last year, when his
son recommended to install Ca.R.L., Horst was
afraid that the robot would be too complex to
handle. What convinced him was that the only
alternative solution would have been to move to
residential care. After a short probationary period,
Horst could not imagine to spend his days without
the new roommate any more.
Figure 4: Horst and Hildegard using video-telephony
(authors’ illustration).
Horst and Hildegard are accompanied by
Ca.R.L. throughout the day. The robot organizes
their schedule, reminds in time and considers their
current condition. The most enjoyable time of the
day is when the two drink a cup of tea in the
afternoon while chatting with their family via video-
telephony – that is almost like sitting around the
table together. Yesterday, Horst even sent Ca.R.L. to
the bathroom while chatting with his grandson. That
way he could have a look at the broken lights to
make sure he brings the right type of bulbs for
change.
8 CONCLUSIONS / DISCUSSION
The presented normative, narrative scenarios cover
three different visions of older people living with a
robotic companion supporting their everyday life.
According to varying requirements, resources and
preferences, the service-robot takes over in different
roles with a set of individually tailored
functionalities.
Though normative, narrative scenarios do not
rely on controlled, repeatable, falsifiable
experiments, the development is based on scientific,
traceable, and transparent principles (Kok et al.,
2011). Scenarios are determined by the quality of
data and information incorporated, internal
consistency, plausibility, and the appropriateness
and realizability of the presented situation (Porter et
al., 1991). However, no scenario can predict future
situations for sure (Porter et al., 1991). A future
scenario is always debatable for it cannot address all
the different perspectives and opinions of scenario
creators and addressees (Gaßner and Steinmüller,
2004).
Indeed, scenarios intend to encourage a lively
but focused discourse about a specific issue and – in
the sense of a user-centered-design approach –
incorporate the target groups into the developmental
process in a very early stage. “Ideally, scenarios lead
to spontaneous, often emotional exchange of
opinions about the presented subject (Gaßner and
Steinmüller, 2004). Engaging robots to support older
people’s daily living is not just a question of
technological opportunities. There are concerns
regarding a potential loss of privacy, or the risks of
isolation or dehumanization of care. It’s not fully
clear if robots really can be supportive rather
disruptive, how such robots can be financed, how
healthcare services have to change, or what happens
in case a robot causes damage. Those aspects have
to be discussed. Assistive service-robots are one
potential solution to meet the challenges caused by
demographic change – but is it the most promising
one?
The next step will be to present the three
normative, narrative scenarios to experts (e.g.
politicians engaged with issues of the healthcare
system, technology developers, or caregivers) and
non-professionals (e.g. older people, or family-
members providing care) belonging to the field of
the scenario space. The discussion about the
scenarios will be guided by means of semi-
structured interviews. The detailed discussion of the
robot scenarios with members of different target
groups and experts as part of an evaluation study
promises to generate both insights in the acceptance
of companion robots for older people as well as new
ideas for robot design.
ACKNOWLEDGEMENTS
This work has received funding from the Federal
State of Thuringia and the European Social Fund
(OP 2007-2013) under grant agreement N501/2009
to the project SERROGA (project number
2011FGR0107).
ScenarioDevelopmentforSuccessfulAegingwithRobotCompanions
217

REFERENCES
Ackerman, P. L. (2008). Knowledge and cognitive aging.
In Craik, F.I.M., Salthouse, T.A. (Eds.). The handbook
of aging and cognition (pp. 445-489). Psychology
Press: New York.
Ballegaar, S.A., Hansen, T., R., Kyng, M. (2008).
Healthcare in everyday Life – Designing Healthcare
Services for Daily Life. In CHI '08 Proceedings of the
SIGCHI Conference on Human Factors in Computing
Systems (pp. 1807-1816).
Beer, J.M., Smarr, C.-A., Chen, T.L., Prakash, A.,
Mitzner, T.L., Kemp, C.C., Rogers, W.A. (2012). The
Domesticated Robot: Design Guidelines for Assisting
Older Adults to Age in Place. In HRI’12, Proceedings
of the 7th ACM/IEEE International Conference on
Human-Robot Interaction (pp. 335-342).
Bekey, G.A. (2012). Current Trends in Robotics:
Technology and Ethics. In: Lin, P., Abney, K., Bekey,
G.A. (Eds.): Robot Ethics. The ethical and social
implications of robotics (pp. 17-34). MIT Press:
Cambridge.
Bishop, P., Hines, A., Collins, T. (2007). The current state
of scenario development:: an overview of techniques.
Foresight, 9 (1), 5–25.
Breuer, H., Grabowski, H., & Arnold, H. (2011). The
Shape of Things to come:: Scenarios and visual
Stories for Telecommunication in 2020. In
Proceedings of the IADIS International Conferences -.
Informatics (pp. 107–114).
Broekens, J., Heerink, M., Rosendal, H., 2009. Assistive
social robots in elderly care: a review. In
Gerontechnology. 8 (2), 94-103.
Courage, C., Baxter, K. (2005). Understanding your
Users: A practical guide to user requirements.
Methods, Tools & Techniques. Morgan Kaufmann:
San Francisco.
Decker, M. (2012). Service robots in the mirror of
reflective research. Poiesis und Praxis, 9, 181-200.
Forlizzi, J., DiSalvo, C., Gemperle, F. (2004). Assistive
Robotics and an ecology of elders living
independently in their homes. Journal of Computer
Interaction, 19 (1), 25-29.
Frennert, S., Östlund, B. (2014). Review: Seven Matters of
Concern of Social Robots and Older People.
International Journal of Social Robotics, 6, 299-310.
Gaßner, R., Steinmüller, K. (2004). Scenarios that tell a
story: Normative Narrative Scenarios – An efficient
tool for participative innovation-oriented foresight. In
Proceedings of the EU-US Scientific Seminar: New
Technology Foresight, Forecasting & Assessment
Methods (pp. 31–37).
Kok, K., van Vliet, M., Bärlund, I., Dubel, A., Sendzimir,
J. (2011). Combining participative backcasting and
exploratory scenario development: Experiences from
SCENES project. Technological Forecasting & Social
Change, 78, 835–851.
Lim, C. , Frohlich, D. M., Amr, A. (2012). The challenge
of designing for diversity in older users.
Gerontechnology, 11 (2), 297.
Marcellini, F. (2012). HAPPY AGEING: Perspectives and
needs of older people towards technology.
Gerontechnology, 11(2), 390-391.
Melenhorst, A. S. (2002). Making decisions about future
activities: The role of age and health.
Gerontechnology, 1 (3), 153-162.
Mulder, S., Yaar, Z. (2007). The User Is Always Right. A
Practical Guide to Creating and Using Personas for
the Web. New Rider: Berkeley.
Porter, A. L., Roper, A. T., Mason, T. W., Rossini, F. A.,
Banks, J. (1991). Forecasting and Management of
Technology. John Wiley & Sons: New York.
Richter, K., Döring, N. (2013). How do companion-type
service-robots fit into daily routines of the elderly to
improve quality of life? In ICSR’13, Proceedings of
the 5th International Conference on Social Robotics,
(pp. 564-565).
Robinson, H., MacDonald, B.; Broadbent, E. (2014). The
Role of Healthcare Robots for Older People at Home:
A Review. International Journal of Social Robotics, 6,
575-591.
Thielke, S., Harniss, M., Thompson, H., Patel, S., Demiris,
G., Johnson, K. (2011). Maslow’s Hierarchy of
Human Needs and the Adoption of Health-Related
Technologies for Older Adults, Aging International,
37, 470-488.
Torta, E., Werner, F., Johnson, D.O., Juola, J.F., Cuijpers,
R.H., Bazzanii, M., Oberzauch, J., Lemberger, J.,
Lewy, H., Bregman, J. (2014). Evaluation of a Small
Socially-Assistive Humanoid Robot in Intelligent
Homes for the Care of the Elderly. Journal of
Intelligent and Robotic Systems, 76, 57-71.
van Notten, P. (2005). Writing on the Wall. Scenario
Development in Times of Discontinuity. Retrieved
from Dissertation.com Database.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
218
