
Automated Mapping of Business Process Execution Language to
Diagnostics Models
Hamza Ghandorh
1
and Hanan Lutfiyya
2
1
Department of Electrical and Computer Engineering, Western University, London, Ontario, Canada
2
Department of Computer Science, Western University, London, Ontario, Canada
Keywords:
Web Service Composition Diagnosis, Codebook Technique, BPMN Mapping.
Abstract:
This paper illustrates how a specification of a business process can be automatically mapped to a fault diag-
nostic model. Observed failures at run-time are quickly analyzied through the diagnostic model to determine
the faulty service.
1 INTRODUCTION
Web services are loosely-coupled, self-contained,
and self-describing modules that perform a pre-
determined task. Services can be used in multiple
applications and thus are reusable. A service of a
particular type can be replaced by another service if
necessary. The architectural paradigm for organiz-
ing distributed applications based on a composition
of web services, which may be under different own-
ership, is referred to as a Service-Oriented Architec-
ture (SOA) (Papazoglou and Van Den Heuvel, 2007) .
These compositions can be used to implement a busi-
ness processes (Lins et al., 2012).
A fault (Garza et al., 2007, Alam, 2009) is a defect
in either hardware or software that causes a failure. A
failure occurs when a service deviates from expected
behaviour. To illustrate the relationship between fault
and failure consider the following example. A hard-
ware power loss causes a service to become unavail-
able. The cause of the hardware power loss is the fault
and the failure is that the service has become unavail-
able. In another example an unexpected load may re-
sult in a service provider in not providing a response
in the expected time i.e., a Quality of Service (QoS)
requirement may be violated. The cause of the unex-
pected load is the fault and the failure is the violation
of the QoS requirement.
A fault (or problem) may cause multiple failures
(often referred to as symptoms). For example, a com-
position of services could have service WS
i
that com-
municates with W S
j
and W S
j
communicates with
W S
k
. If WS
k
becomes unavailable then W S
j
may not
be able to complete a request from W S
i
and thus W S
i
observes a failure of W S
j
. Another example can be
seen in a composition which consists of services W S
i
,
W S
j
, W S
k
and W S
l
. The first three of these services
are clients of WS
l
. If the machine that W S
l
is hosted
on goes down (and thus W S
l
is not available) then the
other services observe a failure of W S
l
. Fault diagno-
sis is used to determine a fault and often includes anal-
ysis of notifications of failures (referred to as events).
To provide a robust service experience, it is im-
portant to have an effective and efficient mechanism
for fault diagnosis (Zhang et al., 2012a). Model-based
fault diagnosis performs fault diagnosis through mod-
els. Some of these, e.g., codebook, have been shown
to be effective in practice. Many fault diagnosis mod-
els require knowledge of the application configura-
tion. With the sheer number of possible applications
there is a need to automate the development of a fault
diagnosis model.
This paper proposes an approach to the generation
of a fault diagnosis model based on a notational rep-
resentation of a business process. We show the fault
diagnosis model can be used in the management of
service compositions.
This paper is organized as follows: Section 2 pro-
vides the background, Section 3 presents related work
on fault diagnosis, Section 4 presents the proposed ap-
proach. Section 5 describes the architecture of man-
agement system for a diagnostic module that uses our
approach, Section 6 describes the results of the test-
ing of our implementation, and Section 7 concludes
the paper.
251
Ghandorh H. and Lutfiyya H..
Automated Mapping of Business Process Execution Language to Diagnostics Models.
DOI: 10.5220/0005430702510259
In Proceedings of the 5th International Conference on Cloud Computing and Services Science (CLOSER-2015), pages 251-259
ISBN: 978-989-758-104-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 BACKGROUND
This section describes fault diagnosis and a notation
for describing a business process.
2.1 Fault Diagnosis
The process of fault diagnosis requires the following:
fault detection, fault localization, and testing (Stein-
der and Sethi, 2004). Fault detection is the process
of capturing symptoms (Hanemann, 2007). Detec-
tion techniques can be based on active schemes (e.g,
polling to determine availability) and/or symptom-
based schemes, where a system component indicates
that it has detected a failure. Examples of proposed
fault detection techniques can be found in Angeli et
al (Angeli and Chatzinikolaou, 2004) and Hwang et
al (Hwang et al., 2010).
Fault localization typically requires an analysis of
a set of observed symptoms. The goal of fault local-
ization is to find an explanation of the symptoms’ oc-
currence. The explanations are delivered in the form
of hypotheses. Hypotheses are statements which ex-
plain that each observed symptom is caused by one or
more designated problems. Based on these hypothe-
ses, a testing step is performed in order to determine
the actual problems through the application of a suit-
able testing mechanism (Steinder and Sethi, 2004).
There are several fault localization techniques
techniques. One of these, event correlation, attempts
to associate one symptom with another symptom in
order to infer the relationship between their occur-
rences (Tiffany, 2002). Through an examination of
these associations, a number of possible hypothe-
ses are generated that reflect the symptoms’ occur-
rence. There are several different types of correla-
tions, which are useful for diagnosing problems in a
network. One of these is described in 3.
In this work when we say that we are mapping
a business process specification to a fault diagnosis
model we are specifically referring to a model that
supports fault localization.
2.2 BPMN
One standard that can be used to model business pro-
cesses is referred to as Business Process Modeling
Notation (BPMN)(Alonso et al., 2004) (Endert et al.,
2007). BPMN has several notational elements. An
activity node represents a web service. A link repre-
sents different possible flows and is chosen based on
the result of the evaluation of a condition of an activ-
ity. A gateway represents decision points that repre-
sent a workflow’s conditions. A sequenceflow repre-
sents a link from a gateway node to an activity node.
A pool represents the combination of a composition
of flowobjects, gateways, and sequenceflows. A mes-
sageflow describes the exchange of messages between
pools, and an event describes the start or end point of
workflow. A pool may have an activity flowobject that
can be represented by another pool. Each pool repre-
sents a workflow and a business process is associated
with a set of pools. An example of a business pro-
cesses workflow modelled as a BPMN specification
is presented in Figure 1.
3 RELATED WORK
Steinder et al. (Steinder and Sethi, 2004) proposed a
classification of fault localization techniques which is
derived from graph-theoretic techniques and included
techniques such as codebook, context-free grammar,
and bipartite causality approaches. Graph-theoretic
techniques rely on the use of graphs. The graphs in-
clude nodes that represent symptoms and problems,
while directed edges are used to model the relation-
ship between the problems and symptoms. Essen-
tially edges represent cause-effect relationships be-
tween problems and symptoms or symptoms and
other symptoms. An example is seen in Figure 3(a).
To create such a model, an accurate knowledge of cur-
rent dependencies among the system components is
required. The rest of this section briefly describes
representative work on fault diagnosis based on the
relationships between problems and symptoms.
Tighe et al. (Tighe and Bauer, 2010) imple-
mented a distributed fault diagnosis algorithm, pro-
posed by Peng and Reggia and is referred to as Par-
simonious Covering Theory (Peng and Reggia, 1990),
in a policy-based management tool called BEAT (Best
Effort Autonomic Tool) (Bahati et al., 2007). The al-
gorithm is concerned with the generation of plausi-
ble hypotheses or covers, based on given information
that comes from graph-theoretic models, prior to di-
agnosis. Hypotheses are delivered and grouped in or-
der to generate disorder-and-manifestation statements
that are forwarded to a decision making system for re-
covery actions.
Zhang et al. (Zhang et al., 2012b) proposed a
hybrid diagnosis method to diagnose web services’
problems in service-oriented architectures. Their
method combines dependency matrix-based diagno-
sis and a Bayesian network-based diagnosis. Al-
though the authors considered the reduction of the
computational complexity of services diagnosis, the
hybrid diagnosis method does not cope with the dy-
namic nature of SOA’s services, and Bayesian net-
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
252
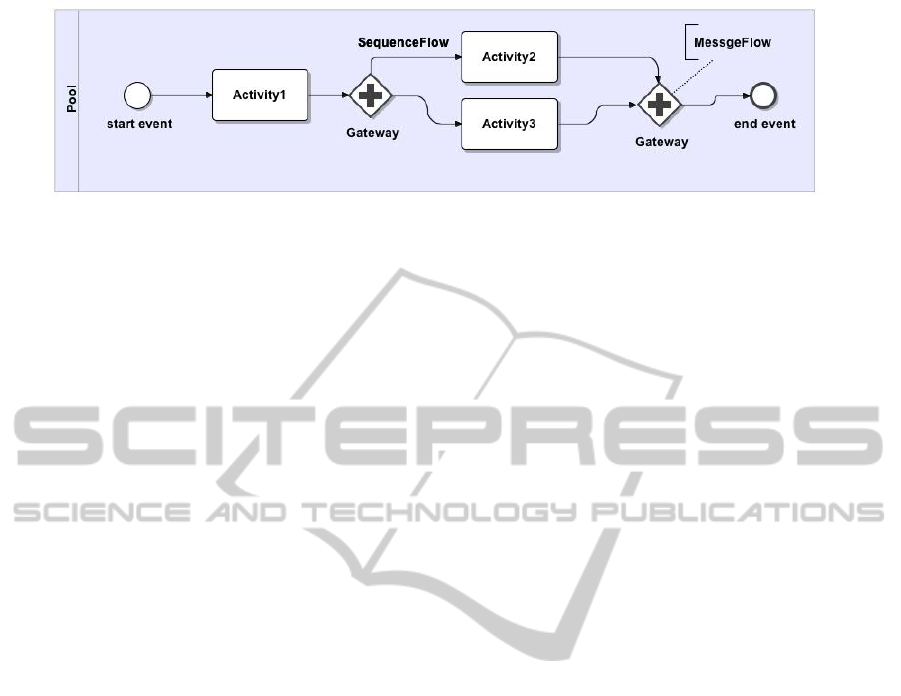
Figure 1: Simple BPMN example.
work diagnosis provides slow measurement.
Ardissono et al. (Ardissono et al., n.d.) proposed a
model-based diagnostic framework with autonomous
diagnostic capabilities to monitor the state of web ser-
vices. As a partially distributed approach, the frame-
work includes several local diagnosers, which is at-
tached to a web service or a composition, cooperate
with a global diagnostic service. As soon as local di-
agnosers notice a problem, they raise an alarm to the
global diagnostic service to detect it.
Most of the above work focuses on the models.
None of the work investigated shows how to automate
the development of a fault diagnosis model based on a
specification of a business process. However, there is
work (e.g., (Mor
´
an et al., 2011)) that takes a business
process specification and maps it to control rules.
4 PROPOSED APPROACH
This section describes our approach to using the
BPMN specification of a business process to a fault
diagnosis model.
4.1 Codebook Technique
Earlier we discussed that a fault may manifest itself in
the unexpected behaviour of a web service that is ob-
served by other web services. For our our fault diag-
nosis model we use a fault propagation model, which
describes which symptoms that may be observed if a
specific fault occurs (K
¨
atker and Paterok, 1997). The
underlying mathematical structure is typically a graph
(Steinder and Sethi, 2004). For this work we chose the
codebook technique (Kliger et al., 1995). This tech-
nique was implemented in a network fault diagnostic
system and the results (Yemini et al., 1996) suggest
that this approach is highly scalable.
The codebook technique or coding technique
(Steinder and Sethi, 2004) uses a causality graph and
problem code (PC) matrix of a web service compo-
sition’s workflow to locate the source of failures. A
causality graph is a bipartite graph whose vertices can
be partitioned into two disjoint subsets V and W such
that each edge connects a vertex from V to one from
W (Caldwell, 1995). A PC matrix is a matrix repre-
sentation of a causality graph used to infer the causes
of observed symptoms. The PC matrix is built based
on the causality graph. An example of the causality
graph and the matrix are illustrated in Figure 3(a) and
3(b), respectively. The matrix consists of a column
that represents symptoms that problems cause. A ma-
trix entry either has the value of zero or one. For ex-
ample, the value of one assigned at PC [1, 1] position
in PC matrix indicates that symptom S
1
can be ob-
served for problem P
1
. The value of zero assigned at
PC[1, 3] position indicates that symptom S
1
can not
be observed for problem P
3
.
At run-time a problem will cause one or more
symptoms to be generated. From this a string can be
formulated. If the i
th
symptom was observed then the
i
th
position in the string is one otherwise it is zero.
This string will be referred to as a current symptoms
vector (CSV).
The diagnosis process uses the Hamming dis-
tance. The Hamming distance is the minimum num-
ber of substitutions that transforms one string into the
another. For example, the Hamming distance between
two words “toned” and “roses” is three letters and the
Hamming distance between the two strings 1011101
and 1001001 is two bits (MacKay, 2005). Each value
in a column in the PC matrix is compared with its
corresponding code in a given CSV. If both values are
identical (i.e, the value in the column in the PC ma-
trix and its corresponding code in the given CSV are
the same), the Hamming distance value is denoted as
zero. Otherwise, the Hamming distance is denoted
as one. The values are then summed to determine
the Hamming distance of the two words. The mini-
mum of the Hamming distance values is an indicator
of the corresponding problems as the causative prob-
lems. For the PC matrix, if the given CSV is 11000,
the Hamming distance is (0,4,4) for columns labeled
P
1
,P
2
and P
3
respectively. Thus, the causative prob-
lem was P
1
. If the given CSV is 11101, the Hamming
distance is (2,2,4) for columns labeled P
1
, P
2
and P
3
.
Thus, the causative problems are limited to P
1
and P
2
.
AutomatedMappingofBusinessProcessExecutionLanguagetoDiagnosticsModels
253
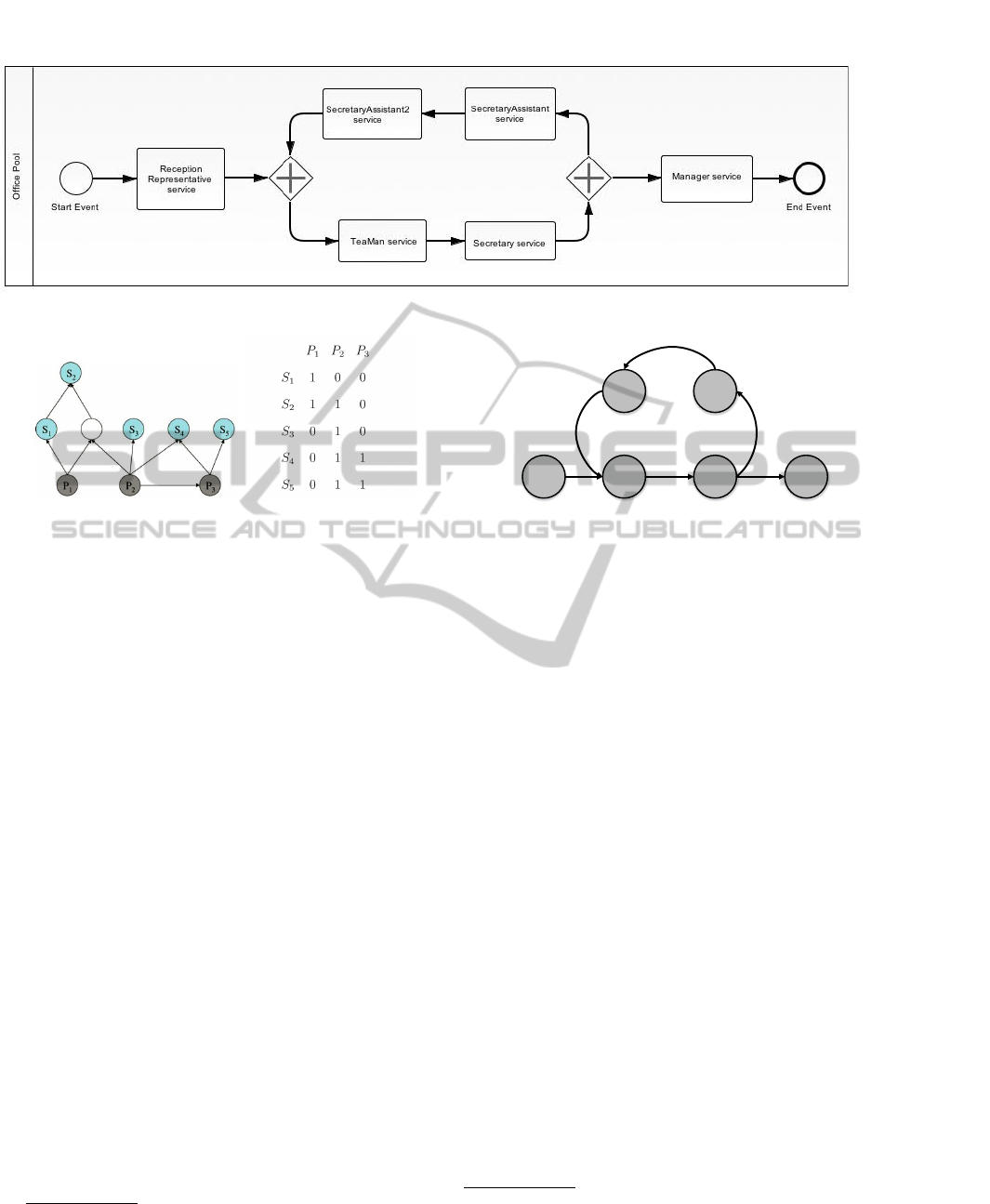
Figure 2: Office Business Process BPMN.
(a) Causality Graph (b) PC matrix
Figure 3: Example of causality graph and PC matrix (Stein-
der and Sethi, 2004).
4.2 BPMN Mapping
The BPMN mapping is done through the transforma-
tion from BPMN graphs to a composition dependency
(CD) graph which is done prior to determining the
causality graph. For illustration purposes, Figure 2
presents BPMN model for a office business process,
which is concerned with delivering only important
mails to the manager office through different filters.
The transformation from BPMN to a CD graph is per-
formed as follows: assume that a CD graph is repre-
sented as (V ,E). Each BPMN atomic activity node is
a node in V . If a decision point follows an activity
then the node in V representing the activity will have
two outgoing edges. Edges represent different possi-
ble flows. Figure 4 depicts the CD graph for the office
business process, where P
1
represents the Reception-
Representative service, P
2
represents the TeaMan ser-
vice, P
3
represents the Secretary service,P
4
represents
the SecretaryAssistant service, P
5
represents the Sec-
retaryAssistant2 service and P
6
represents the Man-
ager service. We note that the granularity of the model
is limited to a service. Hence a problem, P
i
, corre-
sponds to a service. We will use the notation P
i
to
refer to both a problem and to a service.
Assume that the CD graph is represented as (V ,E)
while the causality graph is represented as (V
0
,E
0
)
1
.
1
The causality graph vertices are known in advance
P
6
P
5
P
4
P
3
P
2
P
1
Figure 4: Abstract View of Office Business Process.
The set V
0
can be partitioned into two sets W ,X such
that each edge in E
0
connects a vertex from W to a ver-
tex in X . The set W is the set of potential problems.
Since each node in the CD graph represents an activ-
ity and any of these activities can be faulty then the set
of W is the same as the set V . Let v be a node in a CD
graph. This node represents a potential problem. Any
node, u, in the CD graph, for which there exists a path
from it to the node v, potentially could exhibit a fail-
ure condition if v becomes faulty. Any node that could
exhibit a failure condition is in set X. For a node u we
use the notation P
u
to represent u as a problem and S
u
to represent u as a symptom. Determining the causal-
ity graph of the CD graph requires these two algo-
rithms: Modified Deph-first Search (mdfs), and path-
Generator. The mdfs and pathGenerator algorithms
are presented in algorithm 1 and algorithm 2, respec-
tively. The mdfs algorithm takes as input a CD graph
and does a depth-first traversal. When all child nodes
of node v have been traversed then the pathGenera-
tor algorithm is used to generate all paths from node
v to each leaf node. These paths are used to produce
the causality graph. The causality graph of the office
business process is depicted in Figure 5.
The mdfs algorithm uses two variables: Vertices-
List, and BackTrackEdgesList. VerticesList is a list
that keeps track of each node’s label. The Back-
TrackEdgesList maintains a list of backtrack edges.
A backtrack edge (v,w) indicates that the mdfs algo-
based on the given information from a client about fault and
symptom quantities
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
254

P
1
P
2
P
3
P
4
P
5
P
6
S
1
S
2
S
3
S
4
S
5
S
6
Figure 5: Causality graph of the office business process.
rithm is revisiting node w and that not all of node w’s
children had yet been visited. White is a label that
indicates an unvisited node, which is the initial state
for all nodes. Gray is a label that indicates a node
has been visited but not all of its children have been
traversed. Black is a label that indicates a node has
been visited and all of its children have been pro-
cessed. When the input CD graph is received, mdfs
is triggered (line 1). If the current node being visited
is White, mdfs will assign the Gray label (line 3). The
mdfs algorithm examines each outgoing edge (lines 4-
5). If the node on the other end of the edge is labelled
White then this means that the node has not been vis-
ited and thus no paths have been generated (lines 6-
7). If the node on the other end of the edge is labelled
Gray then the edge is put in the BackTrackEdgesList
(lines 8-9). If there is no unvisited neighbour node for
the current node, mdfs executes the pathGenerator al-
gorithm in order to generate paths (line 12).
The pathGenerator algorithm is executed when all
nodes on the other end of the outgoing edges of node v
have been visited. The pathGenerator uses three vari-
ables: newPath, pathsW, and Paths. The newPath
variable is used to represent a sequence of nodes, and
pathsW represents a set that contains all the paths
from w to all leaf nodes. Paths is a container for all
possible paths. The pathGenerator algorithm is exe-
cuted when a current node v is received from mdfs.
The pathGenerator looks for outgoing edges of node
v. If there are no outgoing edges (line 2), the path-
Generator algorithm creates a new path, appends v
node in this path, and adds the path to Paths (lines
5-7). If there are one or many outgoing edges (line 8),
the pathGenerator algorithm retrieves each path asso-
ciated with w and creates a new path by putting to-
gether v and the path associated with w (lines 10-19).
The execution of the algorithms does not always
provide all paths. This happens where there is a cy-
cle. The existence of backtrack edges indicate a cy-
cle. Assume a backtrack edge: (v,w). The mdfs algo-
rithm will generate all paths from node w to leaf nodes
but the paths generated for node v will not include
those paths that start at w. For example, the edge
(P
5
,P
2
) is a backtrack edge in Figure 4. The paths
from the root node (P
1
) to all nodes in the office CD
graph are: ((P
1
) , (P
1
, P
2
) , (P
1
, P
2
, P
3
) , (P
1
, P
2
, P
3
, P
6
) ,
(P
1
, P
2
, P
3
, P
4
) ,(P
1
, P
2
, P
3
, P
4
, P
5
)) . After considering
the backtrack edge (P
5
,P
2
) , the paths will be: ((P
1
) ,
(P
1
, P
2
) , (P
1
,P
2
,P
3
) , (P
1
, P
2
, P
3
, P
6
) , (P
1
, P
2
, P
3
, P
4
)
, (P
1
, P
2
, P
3
, P
4
, P
5
) , (P
1
, P
2
, P
3
, P
4
, P
5
, P
2
)) . Paths
generated considering backtrack edges are done after
mdfs terminates. Let (v,w) be a backtrack node. Let
P be the set of paths. For each path that ends with w
create a new path that appends v to the path that ends
with w.
Algorithm 1: Modified depth-first search(mdfs).
Procedure: mdfs executed on receipt Graph G
with root node v
Input : G = (V, E) where
E =
{
(v, w)|v, w ∈ V
}
and node v is
a zero indegree edge and all nodes
v are initially unvisited.
Variables : VerticesList carrys on all nodes,
White is label for unvisited node
state, Gray is label for the visited
but not finished node state. Black is
label for the finished node state.
BackTrackEdgesList carrys on
edges resulted from visiting Gray
nodes.
1 mdfs(G,v)
2 if VerticesList [v] = White then
3 VerticesList [v] = Gray
4 forall the e ∈ G.incidentEdges(v) do
5 w = G.incidentEdges(v, e)
6 if VerticesList [w] = White then
7 mdfs(G, w)
8 else if VerticesList [v] =Gray then
9 putEdge(v,w,BackTrackEdgesList)
10 VerticesList [v] = Black
11 // when there are zero unvisited
nodes, backtrack
12 pathGenerator(v)
4.3 Diagnostic Models
The Codebook technique (Steinder and Sethi, 2004)
is used as our diagnostic model. Each path generated
starts from a node v and ends at a node w. If a problem
occurs in node w then it is possible that symptoms are
detected by each node in the path. Thus each path
generated is represented in PC matrix as a column.
We see this with Figure 5 and Table 1.
AutomatedMappingofBusinessProcessExecutionLanguagetoDiagnosticsModels
255
Algorithm 2: pathGenerator.
Procedure: pathGenerator executed on receipt
a graph G and node v
Input : Graph G and node v from mdfs
Variables : newPath, pathsW, and Paths
Output : Possible set of paths
1 begin
2 if G.incidentEdges(v) == null then
3 // Create a new path, add v
node in this path, and add the
path to Paths
4 newPath = null
5 newPath.append(v)
6 Paths = Paths ∪ newPath
7 else
8 forall the e ∈ G.incidentEdges(v) do
9 w = G.incidentEdges(v, e)
10 pathsW = emptySet
11 // Retrieve all previously
generated paths from w to
each leaf node reachable
from w
12 forall the p ∈ Paths.get(w) do
13 newPath = null
14 newPath.append(v)
15 newPath.append(p)
16 pathsW.add(p)
17 Paths = Paths ∪ pathsW
Table 1: Problem codes matrix for the office business pro-
cess.
P
1
P
2
1
P
2
2
P
3
P
4
P
5
P
6
S1 1 1 1 1 1 1 1
S2 0 1 1 1 1 1 1
S3 0 0 1 1 1 1 1
S4 0 0 1 0 1 1 0
S5 0 0 1 0 0 1 0
S6 0 0 0 0 0 0 1
By apply the mdfs and pathGenerator algorithms
on the office CD graph, in Figure 5, since S4 can be
observed for P
4
, the PC[4, 4] is assigned the value of
one. Since symptom S5 can not be observed for P
6
,
PC[5, 6] has been assigned the value 0. All codes as-
signed to present the causality relationships in Fig-
ure 5 are portrayed in table 1. In table 1, there are two
columns representing different patterns that result in
symptoms associated with the web service that is as-
sociated with problem P
2
. These are represented by
(P
2
1
, P
2
2
).
Fault diagnosis assumes a vector of symptoms that
have been reported. It is assumed that these symp-
toms are generated by a failure detection component
located within a composition. The Hamming dis-
tance between the vector and each column is calcu-
lated. The lower the value of the Hamming distance
the more likely that the column explains what is caus-
ing the symptoms.
For the office business process assume that the fol-
lowing symptoms are observed: P
1
says that P
2
has
timed out, P
2
says that P
3
has timed out, P
3
says that
P
4
has timed out, and P
4
says that P
5
has timed out,
and P
5
says that P
6
is not responding. For this pat-
tern of symptoms, the CSV is 111110. Based on the
PC matrix for the office business process, the result
list is depicted at Table 2. From Table 2, the causative
web service for the observed symptoms are P
2
and
P
5
since they have the minimum values between their
peers.
Table 2: Result list of the office business process.
P
1
P
2
1
P
2
2
P
3
P
4
P
5
P
6
S1 0 0 0 0 0 0 0
S2 1 0 0 0 0 0 0
S3 1 1 0 0 0 0 0
S4 1 1 0 1 0 0 1
S5 1 1 0 1 1 0 1
S6 0 0 0 0 0 0 1
∑
4 3 0 2 1 0 3
5 ARCHITECTURE
Section 4 presents an approach to automating the de-
velopment of a fault diagnostic model. This model
is part of the diagnosis module of a third party
third party policy-based management system (Hasan,
2011). The management system allows for Service-
Level Agreements (SLAs) to be negotiated. These
SLAs formalize the QoS requirements. Policies are
used for three types of decisions: service selection,
SLA violation and recovery policies (Hasan, 2011).
The service selection policy is defined by clients to
guide choice of services. The violation policy speci-
fies what constitutes a violation of an SLA. The recov-
ery policy is defined by clients that specifies recovery
actions to be taken when the management system de-
tects a SLA violation.
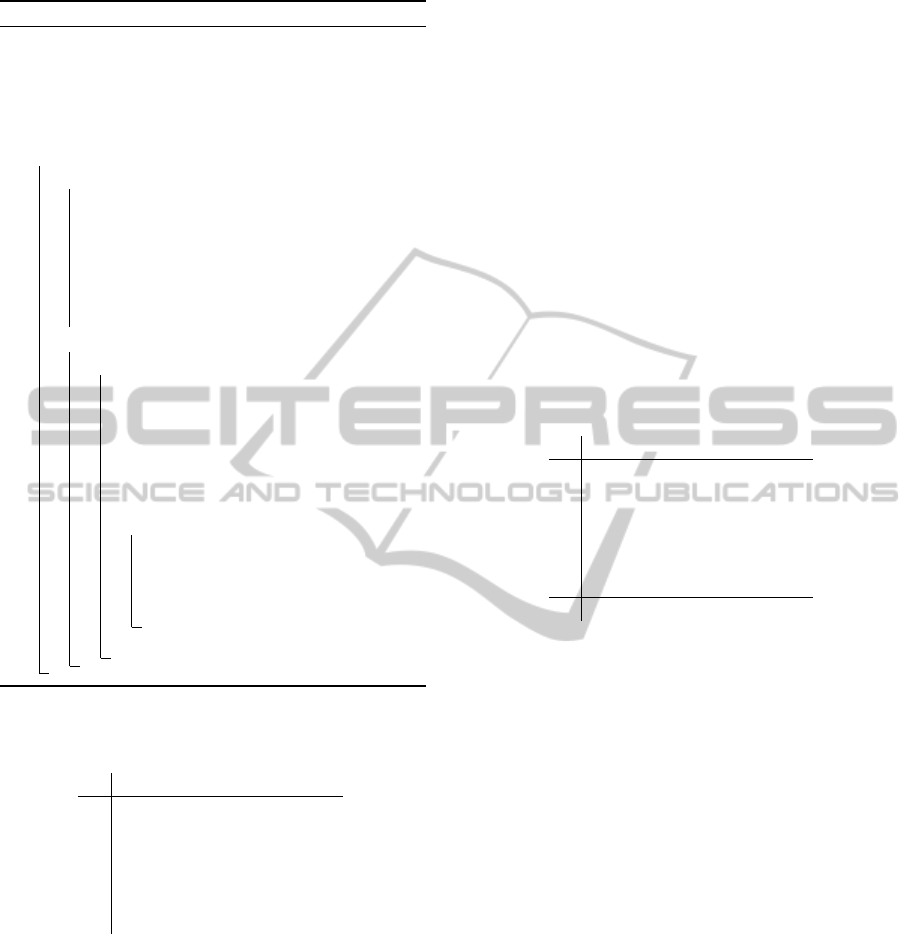
5.1 TPA
A key component in the management system is the
third party agent (TPA). The TPA carries out these
tasks: (1) allows all clients, providers, and provided
services to be registered with it; (2) negotiates SLAs,
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
256
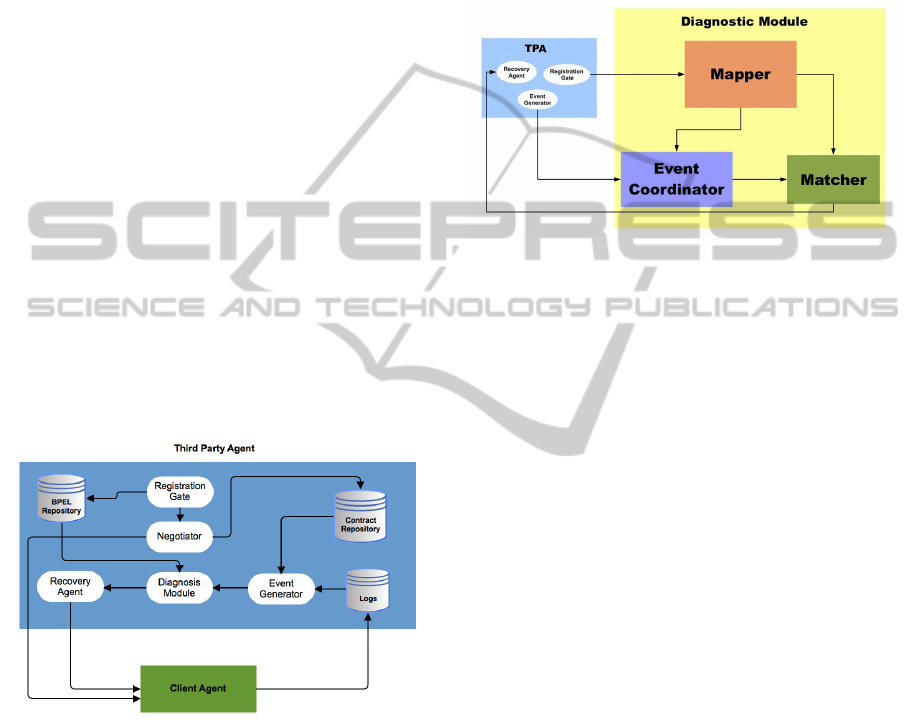
polices, and keeps track of violated SLAs; (3) gen-
erates events to indicate failures and performs recov-
ery actions. An overview of the TPA is presented as
Figure 6. The Registration Gate is responsible for
(1) forwarding a business process specification to the
BPMN Repository, which stores the BPMN specifi-
cation for each composition being managed by the
TPA. This is one of the inputs for the Diagnosis Mod-
ule. (2) forwarding relevant information about clients
and providers to the Negotiator. The Negotiator is re-
sponsible for maintaining an agreement (i.e. SLA)
between a client and a service provider if both parties
have a match between the former’s needs and the lat-
ter’s specification. These agreements are stored in the
Contract Repository. The Event Generator relies on
the stored information found in logs storage, such as,
information related to service invocations. The Event
Generator also “uses SLAs and SLA violation poli-
cies to generate events that represent SLA violations
... when the number [SLA violations] exceeds what
is specified in the SLA violation policy then an event
is generated”(Hasan, 2011). The diagnosis module
receives the generated events and uses the generated
diagnosic model to deliver a diagnostic hypotheses.
The Recovery Agent is responsible for analysing the
diagnosis module’s hypotheses and executing reactive
actions.
Figure 6: TPA with the Client Agent.
5.2 Diagnosis Module Overview
Our proposed diagnosis module provides a hypothe-
sis about the source of symptoms observed in a com-
position. The basic module architecture is presented
in Figure 7. There are main three components: (1)
The Mapper which transforms received BPMN spec-
ifications to PC matrix; (2) The Event Coordinator
which transforms the generated events to CSV; (3)
The Matcher which is responsible for matching PC
matrix and CSV to deliver a hypothesis to the Recov-
ery Agent. The Mapper is only used for new appli-
cations or if an application is modified. Otherwise at
run-time only the Event Coordinator and Matcher are
used. We note that our model narrows the problem to
a service. Further tests could be carried out to further
narrow down the root cause. However, for recovery
purposes it may be sufficient to know the service that
is causing failures and the action could be to select
another instance of the same type.
Figure 7: Diagnosis module with the TPA.
6 EVALUATION
After we implemented the Mapper, the Event Coor-
dinator, and the Matcher components, we tested our
diagnosis module on composition description graphs
to see if the module is able to accurately and correctly
determine the source of events. We ran the diagno-
sis module on a single machine with 2.66 GHz In-
tel Core 2 Duo processor, Mac OS X 10.6.8 , and
eight gigabyte 1.07 GHz memory. We used Netbeans
7.0.1 IDE to run tests and create or manipulate CSVs.
For the transformation from BPMN to the composi-
tion description graphs, we used a tool referred to as
the BPMN Modeler, which is an extension of eclipse
IDE (Eclipse, 2011). The BPMN Modeler is respon-
sible for creating a BPMN for a business process and
forwarding a BPMN textual description to the Map-
per component.
We applied our diagnosis module to nine subjects
which consists of: single or many joins (i.e. sin-
gle or many vertices’ edges ending in one vertex),
single or many splits (i.e. single or many vertices’
edges starting from one vertex and ending at an other
vertex), single or many cycles (i.e. single or many
vertices’ edges starting and ending at the same ver-
tex), self cycles (i.e. single vertex’ edges is starting
and ending at the same vertex), and trees (i.e. single
or more vertices are interconnected in a hierarchical
manner). For each performed test, we assumed that
one fault could happen for each subject. For each sub-
ject we did a test for each web service going down.
All evaluation results and specifications and execu-
AutomatedMappingofBusinessProcessExecutionLanguagetoDiagnosticsModels
257

Table 3: Nine CD graphs specifications.
No
CD
Graph
Vertices
Number
Edges
Number
Single
Cycle
Self
Cycle
Many
Cycles
Single
Split
Many
Splits
Single
Join
Many
Joins
Diagnosis
Time
4
Execution
Time
5
1
Office
CD
6 6 • • • 3.2 1.68
2 CD 1 7 9 • • 5.8 1.85
3 CD 2 6 6 • 2 1.65
4 CD 3 10 10 • • 13.2 2.24
5 CD 4 11 12 • • 9 2.30
6 CD 5 16 20 • • 32.8 5.87
7 CD 6 100 114 • • • 328.8 16.16
8 CD 7 9 11 • • 9.4 1.93
9 CD 8 33 34 • • • 32.8 5.43
4
Time measured in milliseconds
5
Time measured in seconds
tion time of composition dependencies graphs are pre-
sented in table 3. A correct diagnosis was found 100%
of the time. In cyclic composition description graphs,
the diagnosis module indicates not only the problem-
atic node but also the closest predecessor node to the
causative node. The reason is that both the causative
node and the predecessor node have the same code in
the PC matrix. Thus, any faults occurring in either
these nodes will generate the same events in the com-
position.
7 CONCLUSION
This paper focused on an automated mapping of a
business process specification to a diagnostic model.
By using our diagnosis module the complexity of di-
agnosis can be hidden from system administrators by
outsourcing this functionality to a third party agent.
The proposed approach enhances the automated di-
agnosis for a large number of compositions. This
section briefly discusses the work and possible future
work.
Scalability. There are two aspects to this. At run-
time there is a need to compare a set of symptoms
with each column of the problem code (PC) matrix.
There has been considerable work on making this fast
as noted in (Steinder and Sethi, 2004) and the work
on a network fault management system (Yemini et al.,
1996) shows that the use of the codebook can be very
effective at run-time. This suggests that this approach
will be scalable at run-time for service compositions.
The second aspect is the generation of the PC ma-
trix. This requires two algorithms: mdfs and path-
Generator. The mdfs algorithm is based on a modified
depth-first search algorithm. Although compositions
may be large, it is unlikely they will be so large that
it would not be feasible to run the algorithms. We
note that the generation of the PC matrix only needs
to be done once for a specific composition. If a web
service is replaced by another web service there is no
need to generate a new PC matrix. If the composition
changes then a new PC matrix needs to be generated.
However, as future work will look at reusing part of
the computation of the PC matrix for an older version
of the application in order to reduce the time to create
a new PC Matrix if the application topology changes.
Granularity. The granularity of the diagnosis
model is limited to each service. If a service is con-
sidered to be a problem then a set of tests needs to be
carried out to investigate why the service is a problem
e.g., is the host down; is the service down. Further-
more it may be possible to use information in error
messages to improve the granularity. This will be a
topic of investigation for further studies. However, we
note that for recovery purposes the level of granularity
may often be satisfactory. If a service often violates
its SLA then it may feasible to replace it with another
service of the same type. The reasons for SLA viola-
tion are not necessarily relevant.
Mappings. This work considered only mapping
from a BPMN model to a codebook fault diagnosis
model. Further work will look at other businesses
processes specifications as well as other fault diag-
nostic approaches. The current version of the diag-
nosis module only uses the the codebook technique.
Since the coding phase is performed only once, the
codebook approach is very fast, robust, and efficient.
However, the accuracy of the codebook technique is
hard to predict when more than one problem occurs
with overlapping sets of symptoms. In addition, since
each change of system configurations requires regen-
erating the codebook, the technique is not suitable for
environments with dynamically changing dependen-
cies (Steinder and Sethi, 2004). We will enable the
module to use several event correlations techniques
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
258

by which the module will be able to regenerate more
efficient diagnostic knowledge bases.
ACKNOWLEDGEMENTS
The research for this paper was financially supported
by the Ministry of Education of Saudi Arabia, and
College of Computer Science and Engineering at
Taibah University
2
and the Natural Sciences and En-
gineering Research Council of Canada (NSERC).
REFERENCES
Alam, S. (2009), Fault management of web services, Mas-
ter, University of Saskatchewan.
Alonso, G., Casati, F., Kuno, H. and Machiraju, V. (2004),
Web Services: Concepts, Architectures and Applica-
tions, 1st edition edn, Springer.
Angeli, C. and Chatzinikolaou, A. (2004), ‘Online fault de-
tection techniques for technical systems: A survey’,
International Journal of Computer Science and Ap-
plications 1, 51–64.
Ardissono, L., Console, L., Goy, A., Petrone, G., Picardi,
C. and Segnan, M. (n.d.), ‘Towards self-diagnosing
web services’, http://citeseerx.ist.psu.edu/viewdoc/
summary?doi=10.1.1.75.1874.
Bahati, R. M., Bauer, M. A. and Vieira, E. M.
(2007), Policy-driven autonomic management of
multi-component systems, in ‘Proceedings of 2007
the conference of the center for advanced studies on
Collaborative research’, ACM, pp. 137–151.
Caldwell, C. (1995), ‘Graph Theory Glossary’,
http://www.utm.edu/departments/math/graph/
glossary.html#b. Online; accessed 05-June-2011.
Eclipse (2011), ‘BPMN Modeler’, http://eclipse.org/bpmn/.
Online; accessed 17-Oct-2011.
Endert, H., Hirsch, B., K
¨
uster, T. and Albayrak, S. (2007),
Towards a mapping from bpmn to agents, Proceedings
of the 2007 international workshop and 2007 confer-
ence on Service-oriented computing: agents, seman-
tics, and engineering, Springer-Verlag, Berlin, Heidel-
berg, pp. 92–106.
Garza, A., Serrano, J., Carot, R. and Valdez, J. (2007), Mod-
eling and simulation by petri networks of a fault toler-
ant agent node, in ‘Analysis and Design of Intelligent
Systems using Soft Computing Techniques’, Vol. 41
of Advances in Soft Computing, Springer Berlin / Hei-
delberg, pp. 707–716.
Hanemann, A. (2007), Automated IT Service Fault Diag-
nosis Based on Event Correlation Techniques, PhD
thesis, LMU Mnchen: Faculty of Mathematics, Com-
puter Science and Statistics.
2
Taibah University site https://www.taibahu.edu.sa/
Pages/AR/Home.aspx
Hasan, M. S. (2011), Policy Based Third Party Web Service
Management, Master, University of Western Ontario.
Hwang, I., Kim, S., Kim, Y. and Seah (2010), ‘A survey
of fault detection, isolation, and reconfiguration meth-
ods’, Control Systems Technology, IEEE Transactions
on 18(3), 636–653.
K
¨
atker, S. and Paterok, M. (1997), Fault isolation and event
correlation for integrated fault management, in ‘Inte-
grated Network Management V’, Springer, pp. 583–
596.
Kliger, S., Yemini, S., Yemini, Y., Ohsie, D. and Stolfo,
S. (1995), A coding approach to event correlation,
in ‘Integrated Network Management IV’, Springer,
pp. 266–277.
Lins, F., Damasceno, J., Souza, A., Silva, B., Arag
˜
ao, D.,
Medeiros, R., Sousa, E. and Rosa, N. (2012), ‘To-
wards automation of soa-based business processes’,
International Journal of Computer Science, Engineer-
ing and Applications 2(2), 1–17.
MacKay, D. J. (2005), Binary codes, in ‘Information The-
ory, Inference & Learning Algorithms’, Cambridge
University Press, pp. 206–227.
Mor
´
an, D., Vaquero, L. M. and Gal
´
an, F. (2011), Elasti-
cally ruling the cloud: specifying application’s be-
havior in federated clouds, in ‘Cloud Computing
(CLOUD), 2011 IEEE International Conference on’,
IEEE, pp. 89–96.
Papazoglou, M. P. and Van Den Heuvel, W.-J. (2007), ‘Ser-
vice oriented architectures: approaches, technologies
and research issues’, The VLDB journal 16(3), 389–
415.
Peng, Y. and Reggia, J. A. (1990), Abductive inference mod-
els for diagnostic problem-solving, Springer-Verlag
New York, Inc.
Steinder, M. and Sethi, A. S. (2004), ‘A survey of fault lo-
calization techniques in computer networks’, Science
of Computer Programming 53(2), 165–194.
Tiffany, M. (2002), ‘A Survey of Event Correlation
Techniques and Related Topics’, http://citeseerx.
ist.psu.edu/viewdoc/summary?doi=10.1.1.19.5339.
Online; accessed 19-Dec-2010.
Tighe, M. and Bauer, M. (2010), Mapping policies to a
causal network for diagnosis, in ‘6th International
Conference on Autonomic and Autonomous Sys-
tems’, pp. 13–19.
Yemini, S. A., Kliger, S., Mozes, E., Yemini, Y. and Ohsie,
D. (1996), ‘High speed and robust event correlation’,
Communications Magazine, IEEE 34(5), 82–90.
Zhang, J., Huang, Z. and Lin, K.-J. (2012a), A hybrid
diagnosis approach for qos management in service-
oriented architecture, in ‘Web Services (ICWS),
2012 IEEE 19th International Conference on’, IEEE,
pp. 82–89.
Zhang, J., Huang, Z. and Lin, K.-J. (2012b), A hybrid
diagnosis approach for qos management in service-
oriented architecture, in ‘19th IEEE International
Conference on Web Services’, pp. 82–89.
AutomatedMappingofBusinessProcessExecutionLanguagetoDiagnosticsModels
259
