
A 3D Feature for Building Segmentation based on Shape-from-Shading
Dimitrios Konstantinidis
1
, Vasileios Argyriou
2
, Tania Stathaki
1
and Nikos Grammalidis
3
1
Communications and Signal Processing, Imperial College London, London, U.K.
2
Computing and Information Systems, Kingston University, London, U.K.
3
CERTH-ITI, Thessaloniki, Greece
Keywords:
Building Segmentation, Satellite Images, 3D Reconstruction, Shape-from-Shading, Kmeans, Quaternions.
Abstract:
An important cue that can assist towards an accurate building detection and segmentation is 3D information.
Because of their height, buildings can easily be distinguished from the ground and small objects, allowing
for their successful segmentation. Unfortunately, 3D knowledge is not always available, but there are ways
to infer 3D information from 2D images. Shape-from-shading techniques extract height and surface normal
information from a single 2D image by taking into consideration knowledge about illumination, reflectance
and shape. In this paper, a novel feature is proposed that can describe the 3D information of reconstructed
images based on a shape-from-shading technique in order to successfully acquire building boundaries. The
results are promising and show that such a 3D feature can significantly assist in a correct building boundary
detection and segmentation.
1 INTRODUCTION
3D reconstruction is considered as the task of infer-
ring a 3D model of a scene from 2D or 3D data. It
is a well-studied and analyzed problem, applied in a
wide range of fields that require 3D information of a
scene. In urban environments, 3D reconstruction can
assist in the 3D mapping of areas, allowing govern-
ments and municipalities to visualize the current 3D
model of the earth’s terrain and compare it with older
models. Such an urban model comparison could play
a significant role in the analysis and study of changes
that have occurred in the time intervals between the
3D models, allowing social sciences to investigate a
population’s prosperity as it is depicted in the build-
ing expansion/destruction.
Combined with the detection of buildings, 3D re-
construction can greatly assist in the identification and
segmentation of building areas. Buildings are tall
structures and can easily be distinguished from small
objects, such as cars and low vegetation. As a result,
the extracted 3D information can play a significant
role to an accurate building detection and extraction.
Moreover, the appropriate identification of building
boundaries can allow an accurate and robust satellite
image registration, as buildings are static objects that
can be used as reference for image registration.
Although 3D modeling of urban areas can easily
be achieved from appropriate 3D sensors, the high
cost of such sensors poses a serious problem to the
acquisition of 3D data. As a result, other techniques
have been developed that attempt to infer 3D infor-
mation from 2D data. Photometric stereo algorithms
belong to a large category of 3D reconstruction tech-
niques and they are widely employed to solve the
problem of 3D reconstruction from 2D data. To this
end, such methodologies attempt to infer the shape of
a scene from the knowledge or computation of illumi-
nation and reflectance that describe the scenery.
In this paper, a 3D feature is proposed based on
the result of a 3D reconstruction technique applied on
a satellite image. There are two main reasons for the
use of the proposed 3D feature. Firstly, such a feature
can assist in the identification of building boundaries
and contribute towards an accurate pixel-based build-
ing segmentation. Secondly, this feature will make
the creation of 3D building models in an urban area
possible, laying the foundations for a 3D mapping of
an entire urban environment.
The rest of the paper is organized as follows. In
Section 2, a review on state-of-the-art 3D reconstruc-
tion algorithms is provided, while in Section 3 the
proposed and implemented methodologyis described.
In Section 4 some preliminary results on 3D recon-
struction of buildings are presented. Finally, conclu-
sions and future work are presented in section 5.
595
Konstantinidis D., Argyriou V., Stathaki T. and Grammalidis N..
A 3D Feature for Building Segmentation based on Shape-from-Shading.
DOI: 10.5220/0005456305950602
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (MMS-ER3D-2015), pages 595-602
ISBN: 978-989-758-090-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
There is an extensive literature available with ways
to tackle the problem of 3D reconstruction. The se-
lection of a specific methodology depends to a large
degree on the type of data available. As a result,
3D reconstruction techniques can be split on method-
ologies that employ already acquired 3D data, multi-
view stereo matching methods that are based on two
or more 2D images or video and shape from shad-
ing methodologies that employ a single 2D image.
An overview of 3D reconstruction algorithms is pre-
sented in (Kordelas et al., 2010).
3D reconstruction methods based on 3D data are usu-
ally the fastest and most accurate methods available
that create a 3D model of a scene. These techniques
mainly depend on 3D point clouds acquired from 3D
laser scanners or LiDAR (LIght Detection And Rang-
ing) sensors to get the necessary information for the
3D model computation. Since point clouds are usu-
ally unstructured, there are techniques that attempt to
group them in meaningful shapes (Kim and Li, 2006;
Kolluri et al., 2004). Such methods usually rely on
triangularization techniques to get an initial 3D mesh
from the point clouds. Optimization techniques, such
as the Stokes’ theorem, can then be applied to refine
the 3D model and reduce the number of the initially
formed triangles (Kim et al., 2003). Unfortunately,
3D information from radar/laser sensors is not always
available, due to the high cost of acquisition.
Multi-view stereo techniques attempt to infer the 3D
model of a scene from multiple 2D images captur-
ing the same scene from different viewing angles. A
successful approach to 3D reconstruction from mul-
tiple views has been achieved by the method of vi-
sual hull and voxels (Seitz and Dyer, 1997; Eisert
et al., 1999). The whole scene is assumed to be a
large 3D cube that consists of a number of smaller
cuboids, known as voxels. These voxels are removed,
based on whether they are seen from a point of view.
This method is a curving process, where parts of the
scene are removed to accurately describe the underly-
ing original scene. However, visual hull reconstruc-
tion’s performance suffers from the need of multiple
cameras, capturing the scene from different views and
the existence of occluded objects.
One of the most common ways to achieve 3D recon-
struction from two or more images is with the use
of stereo matching techniques (Baillard et al., 1999;
Geiger et al., 2011). Distinctive and invariant to ro-
tation and illumination image features are extracted
from a pair of overlapping images, using algorithms
such as SIFT (Lowe, 2004) or SURF (Bay et al.,
2008). Afterwards, these features are transformed
into 3D points by applying optimization techniques,
such as bundle adjustment (Lourakis and Argyros,
2009) and RANSAC (Fischler and Bolles, 1981).
Since these points are usually sparse in the 3D space,
smoothing functions can be employed to fill the gaps
among the points (Agarwal et al., 2011). An alterna-
tive method for context-based clustering of 2D im-
ages in order to infer 3D information is presented
in (Makantasis et al., 2014). The accuracy of stereo
matching techniques increase as more images of the
same scene become available.
Another approach to 3D reconstruction from multi-
ple images is by employing photometric stereo tech-
niques. These methods estimate the surface normals
of a scene by observing the scene under different
lighting conditions. Woodham was the first to intro-
duce photometric stereo, when he proposed a method
to obtain surface gradients by using two photomet-
ric images, assuming that the surface albedo is known
for each point on the surface (Woodham, 1980). His
method, although simple and efficient, only dealt with
Lambertian surfaces and was sensitive to noise. Cole-
man and Jain extended photometric stereo to four
light sources, where specular reflections were dis-
carded and estimation of surface shape could be per-
formed by means of diffuse reflections and the use of
the Lambertian model (Coleman Jr. and Jain, 1982).
A photometric approach to obtain the shape and re-
flectance information for a surface was developed in
(Nayar et al., 1990). Barsky and Petrou presented
an algorithm for estimating the local surface gradient
and real albedo by using four source colour photomet-
ric stereo in the presence of highlights and shadows
(Petrou and Barsky, 2001; Barsky and Petrou, 2003;
Barsky and Petrou, 2006). Other approaches to the
photometric stereo problem in the presence of high-
lights and shadows worth mentioning (Argyriou and
Petrou, 2008; Argyriou et al., 2013).
Finally, given that a single image is available, 3D
reconstruction can be achieved by employing shape-
from-shading methodologies. Shape-from-shading is
considered a special case of photometric stereo and
was initially formulated by (Horn, 1970). Shape-
from-shading can be expressed as a minimization
problem that attempts to reconstruct scenes by mea-
suring the reflectance and illumination of a surface
(Frankot and Chellappa, 1988; Bors et al., 2003).
Many different approaches have been proposed to
solve this problem in an attempt to infer both the
height and the surface normals for each pixel in an im-
age. A review on some popular shape-from-shading
techniques is performed in (Zhang et al., 1999), while
the different numerical approaches to the problem
of shape-from-shading are analyzed in (Durou et al.,
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
596

2008). A significant problem that can severely limit
the applicability of shape-from-shading techniques is
their high computational complexity.
Our technique is based on the shape from shading
methodology developed in (Barron and Malik, 2013).
His method, named SIRFS, can be considered as an
extension to the classical shape from shading prob-
lem (Horn, 1970), since not only shape, but also re-
flectance and illumination are unknown. With the ac-
quisition of 3D information, we expect to enhance the
classification performance of a building detection al-
gorithm by allowing a more accurate and robust build-
ing boundary segmentation. Moreover, the 3D recon-
structed buildings can be the basic components for the
construction of a 3D model that characterizes the en-
tire urban area. The advantagesof our approach lies in
the fact that the 3D reconstruction will be based on a
single 2D image, without the need of multiple images
capturing the same scene and the fact that the SIRFS
algorithm works without any prior knowledge of the
location of the sun the time the image was captured.
3 METHODOLOGY
Before any methodology is applied, it is assumed
that only a single 2D satellite image, depicting an ur-
ban environment exists and therefore, no reconstruc-
tion strategies that depend on multiple images or al-
ready acquired 3D data can be applied. Furthermore,
the satellite images are assumed to be orthorectified,
meaning that distortions caused from the sensor and
the earth’s terrain have been geometrically removed
and an accurate measurement of angles and distances
is possible. Moreover, since the main goal is to use
the 3D representation of an urban area as an additional
cue for building detection and segmentation purposes,
the assumption that a building detection algorithm has
already been applied is made. Therefore, some ini-
tial candidate areas where buildings exist havealready
been identified and extracted.
Our proposed methodology attempts to reconstruct
only the candidate building areas that a building de-
tector outputs. Such an approach will not only re-
duce the computational burden of a 3D reconstruc-
tion procedure applied in the entire image, but also
allow for an accurate 3D representation of the can-
didate building areas since only a few objects are in-
volved, leaving limited space for errors. The extracted
3D information from these areas will enable the cre-
ation of coarse 3D building models and assist towards
a precise and robust building detection and segmen-
tation. Buildings, being tall structures, can easily be
distinguished from ground objects. As a result, ar-
eas that do not contain buildings can be discarded,
leading to an increase in the classification accuracy
of an object-based building detection algorithm. Fur-
thermore, building boundaries can be identified and
segmented based on height and surface normals, al-
lowing the refinement of the initial computed candi-
date building areas and increasing the performance of
a pixel-based building detection algorithm.
To achieve the desired 3D representation of the ur-
ban areas, the proposed approach relies on the work
of Barron (Barron and Malik, 2013). The authors
present the SIRFS algorithm as an extension of a clas-
sical shape-from-shading algorithm, capable of com-
puting all the unknown parameters (i.e. shape, re-
flectance and illumination). The shape-from-shading
problem is formulated by the following maximization
function:
max
R,Z,L
P(R)P(Z)P(L) (1)
subject to I = R+ S(Z, L) (2)
where I is the image for which the 3D representa-
tion is sought, R is the log-reflectance image, Z is the
depth map, and L is a spherical harmonic model of
illumination. P(R), P(Z) and P(L) are the priors on
reflectance, shape and illumination respectively and
S(Z, L) linearizes Z into a set of surface normals, pro-
ducing a log-shading image from these normals and
the illumination L (Barron and Malik, 2013).
Every candidate building area is processed separately
so as to successfully extract its 3D information. As a
preprocessing step, the illumination of each image is
histogram equalized so as details in the image become
more apparent. This is achieved by transforming the
RGB color space to another color space, where the
color and the illumination component of the image is
separated. The HSV color space can achieve this dif-
ferentiation. Afterwards, the V channel of the HSV
color space, representing illumination, is histogram
equalized. Histogram equalization distributes an im-
age’s pixel values uniformly, allowing objects that are
barely seen to be distinguished. Then, the HSV color
space, having the V channel histogram equalized is
transformed back to the RGB color space.
To successfully extract 3D information, the SIRFS al-
gorithm requires a mask, which defines where the ob-
ject of interest is. As a result, an initial image seg-
mentation should be performed and the pixels that be-
long to the building class should be highlighted. Since
such knowledge is not available, a kmeans algorithm
is employed to partition image pixels to k number of
classes according to their values. A kmeans algorithm
is a clustering algorithm that given k number of clus-
ters, it defines the initial positions of the cluster cen-
ters randomly and then iteratively moves the cluster
A3DFeatureforBuildingSegmentationbasedonShape-from-Shading
597
centers in new positions that best describe the data
distribution (MacQueen, 1967). Given that a satellite
image contains n channels, each pixel is described by
a tuple of n values and according to these values, each
candidate area is segmented. The number of clusters
k for the kmeans algorithm is selected to be equal to
2, since the problem can be considered as a binary
classification task with two classes, the building and
the non-building class. The result of the segmenta-
tion is afterwards refined with morphological opening
and closing operations, so that pixels with no adjacent
neighbors belonging to the same class are reversed to
the other class. These morphological operations are
performed in order to avoid small islands or holes of
pixels that can cause problems in the correct estima-
tion of height and surface normals.
Since there is no prior knowledge of which cluster of
pixels corresponds to the building class, the SIRFS al-
gorithm is applied twice, once for each cluster of pix-
els, assuming each time that the tested cluster is the
one that corresponds to the building class. The output
of the SIRFS method is used to describe only the clus-
ter of pixels for which the algorithm was executed,
although the SIRFS method computes an output for
every pixel of the provided image. The output of the
SIRFS algorithm is for each pixel p of the image, a
height value H
p
, and the coordinates of the surface
normal vector in the 3D space (N
x
p
, N
y
p
, N
z
p
).
Given the result of the 3D reconstruction procedure
that was previously described, a 3D feature is pro-
posed that is based on the aforementioned values of
the height and the surface normals computed for each
pixel of a candidate building area. In order to de-
fine this new feature, the quaternion algebra that was
first described in (Hamilton, 1844) is employed. A
quaternion is a special complex number in the 3D
space and it can be described by the equation q =
a+ b ∗i+ c∗ j + d ∗k. The reasons behind the selec-
tion of a quaternion to characterize the proposed 3D
feature lie in the fact that a quaternion can describe a
4-tuple value, while being able to represent a structure
in the 3D sphere. Furthermore, being an expansion of
a complex number, a quaternion possesses some inter-
esting properties, such as the fact that its multiplica-
tion is not commutative (ij = k, while ji = −k), while
its norm is computed in the same way as the norm of
a vector (kqk=
√
a
2
+ b
2
+ c
2
+ d
2
). Such properties
may be proved useful for the tasks of building seg-
mentation and 3D reconstruction. Therefore, the 3D
representation of each pixel is approached as a quater-
nion of the following form:
q
p
= H
p
+ N
x
p
∗i+ N
y
p
∗ j + N
z
p
∗k (3)
Equation (3) describes the novel 3D feature that is
proposed for building extraction and segmentation.
Such a 3D feature will be able to not only charac-
terize the 3D representation of an urban area, but also
identify and segment buildings that are present in the
area. The reason behind the definition of such a 3D
feature lies in the fact that this feature can afterwards
be used as an input to another machine learning al-
gorithm that attempts to locate and segment building
boundaries based on the height information and the
surface normals. Furthermore, such 3D knowledge
can assist in the elimination of false alarms building
detection algorithms produce, by acknowledging the
lack of buildings in an extracted candidate building
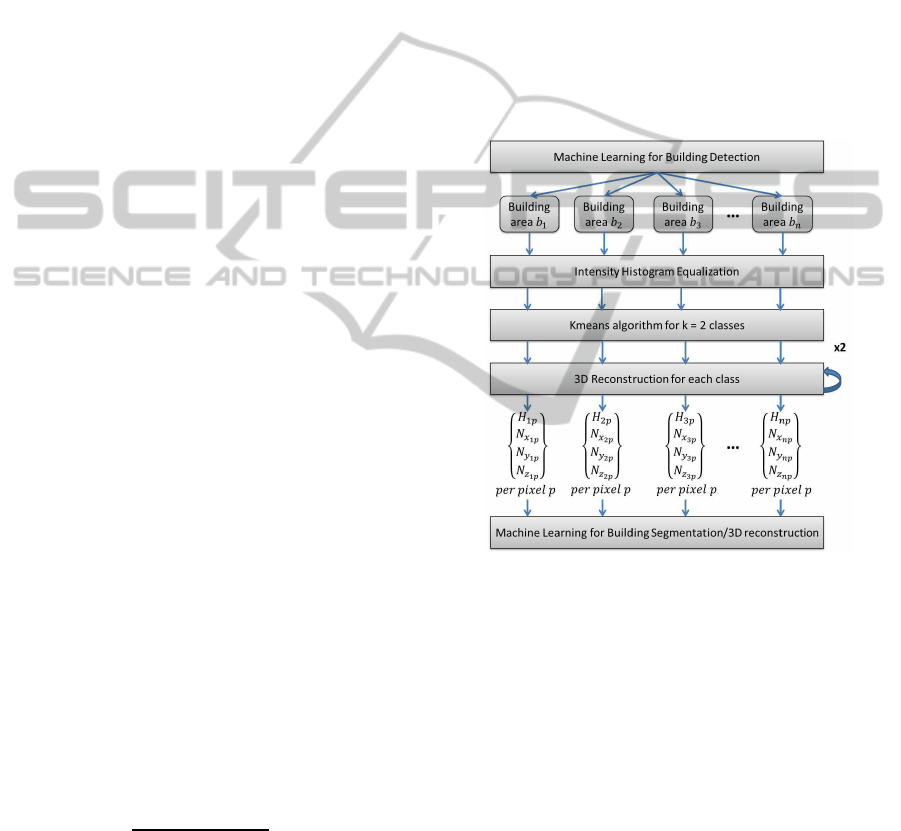
area. The methodology for the creation of the pro-
posed 3D feature is summarized in Figure 1.
Figure 1: Our proposed 3D feature extraction procedure.
4 EXPERIMENTS AND RESULTS
In this section, the results of employing the proposed
methodology in a set of image patches extracted from
a QuickBird satellite image will be presented. The
output of the SIRFS algorithm in the form of height
and surface normals computed for every pixel of the
tested image patches will be visualized and the value
and importance of the extracted 3D information in or-
der to achieve a successful building segmentation will
be demonstrated.
To identify the potential of the proposed method-
ology to correctly describe building regions and lead
to their accurate and robust segmentation. For this
purpose, five image patches where buildings exist and
three image patches with no buildings present were
employed. The reason behind the selection of the last
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
598

three non-building image patches is to demonstrate
the ability of the proposed methodology to not only
extract building boundaries, but also identify when
buildings are not present, leading to rejection of false
positives, given our methodology is applied in con-
junction with a building detector algorithm. Figure 2
presents the tested image patches, the results of their
binary segmentations by employing the kmeans algo-
rithm and the output of the SIRFS algorithm in the
form of height information and surface normals.
The first row of Figure 2 shows the five tested satel-
lite image patches after being preprocessed with his-
togram equalization. As it is already mentioned, his-
togram equalization allows objects that are barely
seen to be distinguished by uniformly distributing the
illumination in an image patch. The eight tested and
preprocessed images are shown in the first row of Fig-
ure 2, where only the RGB channels are shown for vi-
sualization purposes.
The second row of Figure 2 shows the result of
the kmeans algorithm applied on the tested image
patches. The masks are binary since the kmeans al-
gorithm is executed for k = 2 classes. Although the
segmentation is not too accurate, it provides satisfac-
tory results for the SIRFS algorithm that is then em-
ployed. The better the object of interest is segmented,
the more accurate the results of the 3D reconstruction
achieved from the SIRFS algorithm are. Segmenting
an image patch into more than 2 classes may produce
slightly better results, but it would significantly in-
crease the execution time of the methodology, since
the SIRFS algorithm, which is quite a computation-
ally heavy operation, would then have to be executed
k times, where k is the number of classes.
The third row of Figure 2 shows the height in-
formation that is derived from the execution of the
SIRFS algorithm. The images are slightly rotated for
better visualization. As one may observe, the differ-
ences in the height of buildings with respect to the
ground is correctly captured in the 3D reconstruc-
tion of the image patches, while inaccuracies intro-
duced by the kmeans clustering are to some degree
rectified. As expected, buildings can be easily dis-
tinguished from ground objects based on their height,
and therefore, the extracted height information is an
important cue towards an accurate and robust build-
ing detection and segmentation. A drawback of the
employed 3D reconstruction procedure is that inaccu-
racies of the computed height are present, especially
close to the borders of an image patch.
Another observation concerns the computed
height of the roads. The height of roads is relatively
low, with respect to the ground, thus the SIRFS algo-
rithm can correctly capture the surface of the tested
terrain. However, there are cases where roads are
shown a little elevated overthe ground. In these cases,
the shape of the roads can be an important cue towards
their identification as non-building objects. These ob-
servations showthat the 3D representation of an urban
environment can be used to reduce the false positives
that a building detection algorithm produces, thus in-
creasing the classification accuracy of a building de-
tector and allowing an accurate and successful pixel-
based building segmentation. Moreover, the potential
of the 3D representation to describe roads can be used
for the development of an accurate and robust road
segmentation algorithm.
The fourth row of Figure 2 presents the results
of the surface normals based on the SIRFS algorithm
that are computed for each pixel of the image patch.
The surface normals are vectors in the 3D space that
describe the orientation of the surface of a 3D repre-
sentation. Surface normals are expected to be really
valuable features that indicate the existence of build-
ings, since building rooftops are usually flat or have
a uniform slope. Such an attribute of buildings is ex-
pected to be reflected to the surface normals, which
should have slight variations on the building area, but
high variations close to the building boundaries, since
the height of terrain close to the building boundaries
is changed abruptly. The values of the 3D surface
normal vectors are mapped to the RGB color space
and are presented in the fourth row of Figure 2. One
may observe that the SIRFS algorithm produces sur-
face normals with the same or similar orientation for
flat areas. As a result, the information extracted from
the surface normals can play a significant role to-
wards the identification and segmentation of building
boundaries.
In order to demonstrate how valuable the 3D infor-
mation extracted from the SIRFS algorithm is for the
task of building segmentation, some preliminary re-
sults are presented. To this end, the buildings shown
in the first row of Figure 2 were manually segmented
so as to consist the ground truth masks of the tested
image patches. Afterwards, these ground truth masks
were compared to the kmeans segmentation before
the 3D reconstruction procedure, as presented on the
second row of Figure 2. Furthermore, the kmeans al-
gorithm was employed once again to compute a re-
fined segmentation, where except for the color infor-
mation, each pixel is also represented by the 3D in-
formation computed from the SIRFS algorithm, in the
form of height and surface normals. Since the height
information is relative to the tested image patch, the
height values of each patch are normalized to the
range [0, 1]. What is more, two multipliers are em-
ployed to give a certain weight to the height and
A3DFeatureforBuildingSegmentationbasedonShape-from-Shading
599
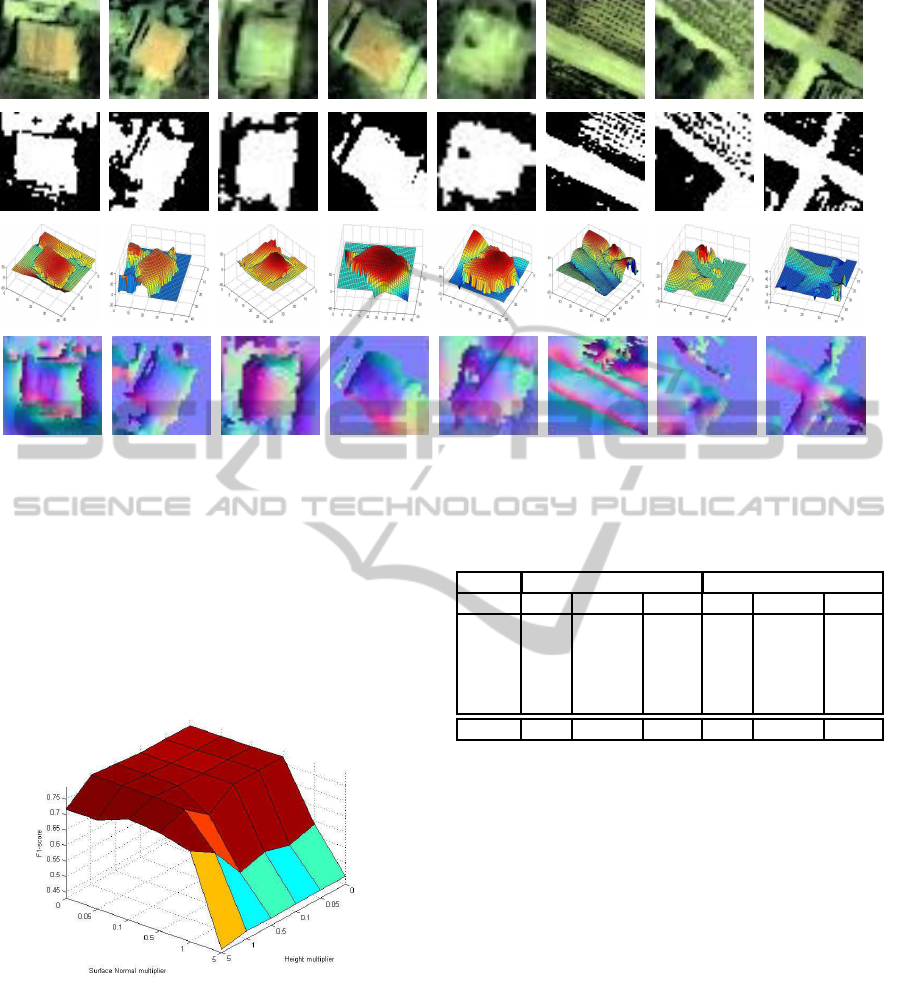
Figure 2: Results from SIRFS algorithm. Original images after preprocessing shown in first row. Results from kmeans
algorithm shown in second row. Height information extracted from SIRFS algorithm shown in third row. Surface normals
extracted from SIRFS algorithm shown as RGB images in fourth row.
surface normal information, in order to test how the
weighted 3D information affects building segmenta-
tion. The values chosen for both the height and the
surface normal multipliers are [0, 0.05, 0.1, 0.5, 1, 5].
Figure 3 presents the F1-score of the pixel-based com-
parison between the ground truth masks and the re-
fined building segmentations.
Figure 3: Results of building segmentation based on various
values of height and surface normal multipliers.
There is a single combination of height and surface
normal multipliers’ values that give the best possi-
ble results with respect to the F1-score. These val-
ues are 1 and 0 for the height and surface normal
multiplier respectively. These values demonstrate the
importance of the height information for the build-
ing detection and segmentation task. On the other
hand, it seems that the surface normals decrease the
performance of the building segmentation based on
Table 1: Segmentation results of the five tested building im-
age patches.
Before Reconstruction After Reconstruction
Image Recall Precision F-score Recall Precision F-score
1 0.902 0.57 0.698 0.905 0.599 0.721
2 0.992 0.514 0.677 0.989 0.548 0.705
3 0.928 0.669 0.778 0.928 0.669 0.778
4 0.906 0.714 0.798 0.902 0.743 0.815
5 0.968 0.793 0.872 0.971 0.852 0.908
Average 0.939 0.652 0.765 0.939 0.682 0.785
the kmeans algorithm. This can be attributed to the
fact that all flat areas tend to have normals pointing
upwards and thus, a building cannot be easily dis-
tinguished using surface normals. Of significant im-
portance is also the fact that giving strong weight to
the height information leads to a drop in the results
of the building segmentation. This happens because
there are inaccuracies in the height computed from
the SIRFS algorithm close to the boundaries of the
image patches. The results in the form of recall, preci-
sion and F1-score achieved on the pixel-based build-
ing segmentation of the five image patches, depicting
buildings before and after the introduction of the 3D
information are presented on Table 1.
The numbers in the first column of Table 1 correspond
to the order of the five tested image patches as they
appear in the first row of Figure 2 from left to right.
From Table 1, one can conclude that the building seg-
mentation achieved from the kmeans algorithm and
that is based both on color and on the height and sur-
face normal information is more accurate than with-
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
600
out the 3D knowledge. More specifically, the preci-
sion of the pixel-based building segmentation is sig-
nificantly increased by a measure of 4.6% when 3D
information is introduced, while recall remains unal-
tered. Overall, the increase in the measure of F1-score
by 2.6% shows that the introduction of 3D informa-
tion can significantly assist towards an accurate and
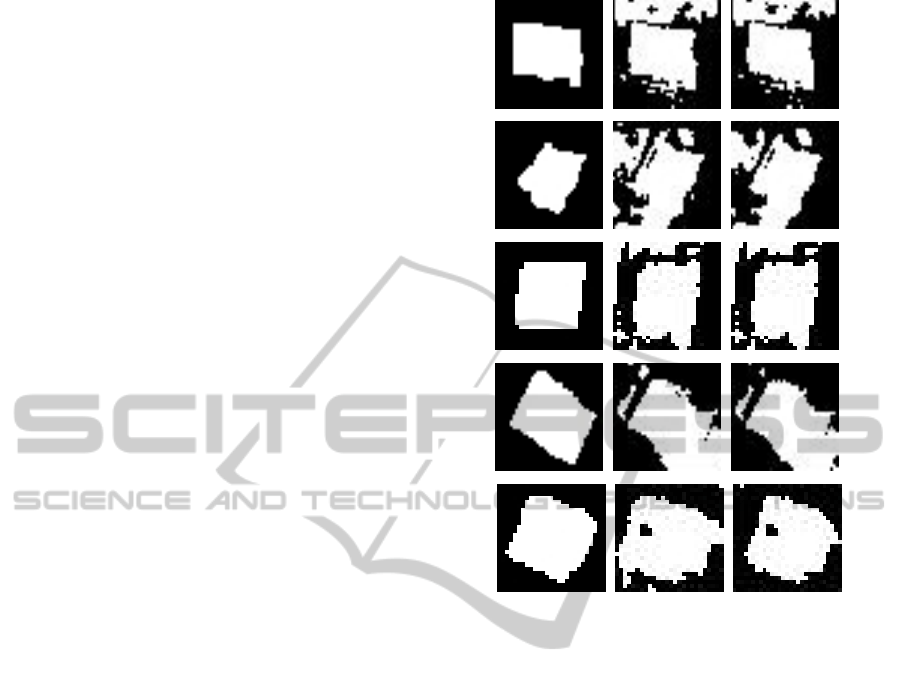
robust building segmentation. A visualization of the
best building segmentation results of Table 1, along
with the initial segmentation results and the ground
truth masks is presented in Figure 4.
5 CONCLUSIONS
A methodology to extract 3D information using a
shape-from-shading algorithm, named SIRFS (Bar-
ron and Malik, 2013) is proposed. Furthermore, a 3D
feature to describe the 3D representation of an urban
environment is defined. The proposed feature can not
only allow for a 3D reconstruction of an urban en-
vironment, but also improve the classification accu-
racy of a building detection algorithm by identifying
buildings and rejecting image regions with no build-
ings present. Moreover, the extracted 3D information
can lead to an accurate pixel-based building bound-
ary extraction, thus assisting to a successful building
boundary identification and segmentation.
The experimental results on the 3D reconstruction
of buildings and roads can be used as a qualitative
measurement of the importance and usefulness of the
proposed 3D feature. The height information and the
extracted surface normals can be proved valuable fea-
tures to a machine learning algorithm that attempts to
segment buildings in an urban environment. Table 1
presents with a quantitative manner the significance
of the 3D information to an accurate and robust pixel-
based building segmentation.
In the future, the proposed 3D feature will be em-
ployed in order to demonstrate the significance of the
height and normal information in the building extrac-
tion task. The goal would be to create a machine
learning algorithm that accepts as input the candi-
date building areas detected from a building detection
methodology. Along with the extracted 3D informa-
tion from the proposed methodology of this thesis, the
machine learning algorithm would be capable of facil-
itating the building detection task by discarding areas
that do not contain buildings and allowing for an ac-
curate building segmentation by correctly identifying
the building boundaries. In addition, such an algo-
rithm could be used to successfully solve the build-
ing change detection task, by taking into considera-
tion both 2D and 3D information and overcoming the
Figure 4: Results from the kmeans building segmentation.
Ground truth masks of buildings shown in first column.
Kmeans building segmentation employing only color infor-
mation shown in second column. Kmeans building segmen-
tation employing color and 3D information shown in third
column.
limitations of algorithms that operate only on 2D or
3D data.
ACKNOWLEDGEMENTS
This research has been co-financed by the European
Union (European Social Fund-ESF) and Greek na-
tional funds through the Operational Program ”Ed-
ucation and Lifelong Learning” of the National
Strategic Reference Framework (NSRF): THALIS-
NTUA-UrbanMonitor project and by the Operational
Programme ”Competitiveness and Entrepreneurship
(OPCE II)(EPAN II) of the National Strategic Ref-
erence Framework (NSRF)”- Greece-Israel Bilat-
eral R&T Cooperation 2013-2015: 5 Dimensional
Multi-Purpose Land Information System (5DMu-
PLIS) project.
A3DFeatureforBuildingSegmentationbasedonShape-from-Shading
601

REFERENCES
Agarwal, S., Furukawa, Y., Snavely, N., Simon, I., Curless,
B., Seitz, S., and Szeliski, R. (2011). Building Rome
in a Day. Communications of the ACM, 54(10):105–
112.
Argyriou, V. and Petrou, M. (2008). Recursive photomet-
ric stereo when multiple shadows and highlights are
present. In IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1–6.
Argyriou, V., Zafeiriou, S., Villarini, B., and Petrou, M.
(2013). A sparse representation method for determin-
ing the optimal illumination directions in Photometric
Stereo. Signal Processing, 93(11):3027–3038.
Baillard, C., Schmid, C., Zisserman, A., and Fitzgibbon,
A. (1999). Automatic line matching and 3d recon-
struction of buildings from multiple views. In ISPRS
Conference on Automatic Extraction of GIS Objects
from Digital Imagery, volume 32, Part 3-2W5, pages
69–80.
Barron, J. and Malik, J. (2013). Shape, Illumination,
and Reflectance from Shading. Technical Report
UCB/EECS-2013-117, EECS, UC Berkeley.
Barsky, S. and Petrou, M. (2003). The 4-source photomet-
ric stereo technique for three-dimensional surfaces in
the presence of highlights and shadows. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
25(10):1239–1252.
Barsky, S. and Petrou, M. (2006). Design Issues for a
Colour Photometric Stereo System. Journal of Math-
ematical Imaging and Vision, 24(1):143–162.
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (SURF). Computer Vision
and Image Understanding, 110(3):346–359.
Bors, A., Hancock, E., and Wilson, R. (2003). Terrain anal-
ysis using radar shape-from-shading. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
25(8):974–992.
Coleman Jr., North, E. and Jain, R. (1982). Obtaining 3-
dimensional shape of textured and specular surfaces
using four-source photometry. Computer Graphics
and Image Processing, 18(4):309 – 328.
Durou, J., Falcone, M., and Sagona, M. (2008). Numeri-
cal Methods for Shape-from-shading: A New Survey
with Benchmarks. Computer Vision and Image Un-
derstanding, 109(1):22–43.
Eisert, P., Steinbach, E., and Girod, B. (1999). Multihy-
pothesis volumetric reconstruction of 3-d objects from
multiple calibrated camera views. In Proceedings of
International Conference on Acoustics, Speech, and
Signal Processing (ICASSP), pages 3509–3512.
Fischler, M. and Bolles, R. (1981). Random Sample Con-
sensus: A Paradigm for Model Fitting with Applica-
tions to Image Analysis and Automated Cartography.
Communications of the ACM, 24(6):381–395.
Frankot, R. and Chellappa, R. (1988). A method for enforc-
ing integrability in shape from shading algorithms.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 10(4):439–451.
Geiger, A., Ziegler, J., and Stiller, C. (2011). StereoScan:
Dense 3d reconstruction in real-time. In Intelligent
Vehicles Symposium (IV), pages 963–968.
Hamilton, W. (1844). On quaternions, or on a new system
of imaginaries in algebra. Philosophical Magazine,
25(3):489–495.
Horn, B. K. (1970). Shape from Shading: A method for
obtaining the shape of a smooth opaque object from
one view. Technical report, MIT.
Kim, N., Yoo, S., and Lee, K. (2003). Polygon reduction of
3D objects using Stokes’ theorem. Computer Methods
and Programs in Biomedicine, 71(3):203–210.
Kim, S.-I. and Li, R. (2006). Complete 3D surface re-
construction from unstructured point cloud. Journal
of Mechanical Science and Technology, 20(12):2034–
2042.
Kolluri, R., Shewchuk, J., and O’Brien, J. (2004). Spec-
tral Surface Reconstruction from Noisy Point Clouds.
In Symposium on Geometry Processing, pages 11–21.
ACM Press.
Kordelas, G., Perez-Moneo Agapito, J. D., Vegas Hernan-
dez, J. M., and Daras, P. (2010). State-of-the-art Al-
gorithms for Complete 3D Model Reconstruction. In
Summer School ENGAGE-Immersive and Engaging
Interaction with VH on Internet.
Lourakis, M. and Argyros, A. (2009). SBA: a software
package for generic sparse bundle adjustment. ACM
Transactions on Mathematical Software, 36(1):1–30.
Lowe, D. (2004). Distinctive image features from scale in-
variant keypoints. International Journal of Computer
Vision, 60(2):91–110.
MacQueen, J. (1967). Some Methods for classification
and Analysis of Multivariate Observations. In Pro-
ceedings of 5th Berkeley Symposium on Mathematical
Statistics and Probability, pages 281–297. University
of California Press.
Makantasis, K., Doulamis, A., Doulamis, N., and Ioan-
nides, M. (2014). In the wild image retrieval and clus-
tering for 3D cultural heritage landmarks reconstruc-
tion. Multimedia Tools and Applications, pages 1–37.
Nayar, S., Ikeuchi, K., and Kanade, T. (1990). Determin-
ing shape and reflectance of hybrid surfaces by photo-
metric sampling. IEEE Transactions on Robotics and
Automation, 6(4):418–431.
Petrou, M. and Barsky, S. (2001). Shadows and highlights
detection in 4-source colour photometric stereo. In
International Conference on Image Processing, vol-
ume 3, pages 967–970.
Seitz, S. and Dyer, C. (1997). Photorealistic scene re-
construction by voxel coloring. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1067–1073.
Woodham, R. (1980). Photometric Method For Determin-
ing Surface Orientation From Multiple Images. Opti-
cal Engineering, 19(1):139–144.
Zhang, R., Tsai, P., Cryer, J., and Shah, M. (1999). Shape
from Shading: A Survey. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 21(8):690–
706.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
602
