Offline Scheduling of Map and Reduce Tasks on Hadoop Systems
Aymen Jlassi
1,2
, Patrick Martineau
2
and Vincent Tkindt
2
1
Cyres Group, 19 rue Edouard Vaillant, 37000 Tours, France
2
University François-Rabelais of Tours, CNRS, LI EA 6300, OC ERL CNRS 6305, Tours, France
Keywords: Big Data, MapReduce Model, Hadoop Scheduling Problem, Time Indexed Formulation.
Abstract: MapReduce is a model to manage quantities massive of data. It is based on the distributed and parallel
execution of tasks over the cluster of machines. Hadoop is an implementation of MapReduce model, it is
used to offer BigData services on the cloud. In this paper, we expose the scheduling problem on Hadoop
systems. We focus on the offline-scheduling, expose the problem in a mathematic model and use the time-
indexed formulation. We aim consider the maximum of constraints of the MapReduce environment.
Solutions for the presented model would be a reference for the on-line Schedules in the case of low and
medium instances. Our work is useful in term of the problem definition: constraints are based on
observations and take into account resources consumption, data locality, heterogeneous machines and
workflow management; this paper defines boundaries references to evaluate the online model.
1 INTRODUCTION
Manage and access efficiently massive data is
becoming more and more important for companies.
Google (Dean, 2004) introduced the model
MapReduce as a distributed and parallel Model for
data intensive computing. Every job is composed of
a set of “map” and “reduce” tasks, which is executed
in a distributed fashion over a cluster of machines.
Map tasks have to be executed before reduce tasks.
Tasks have to be executed as near as possible to the
needed data input. Data output of tasks map are
transferred to the reduce tasks using the network.
MapReduce model is characterized by its simplicity:
users wanting to access to data, create “map” and
“reduce” tasks, which are next scheduled by
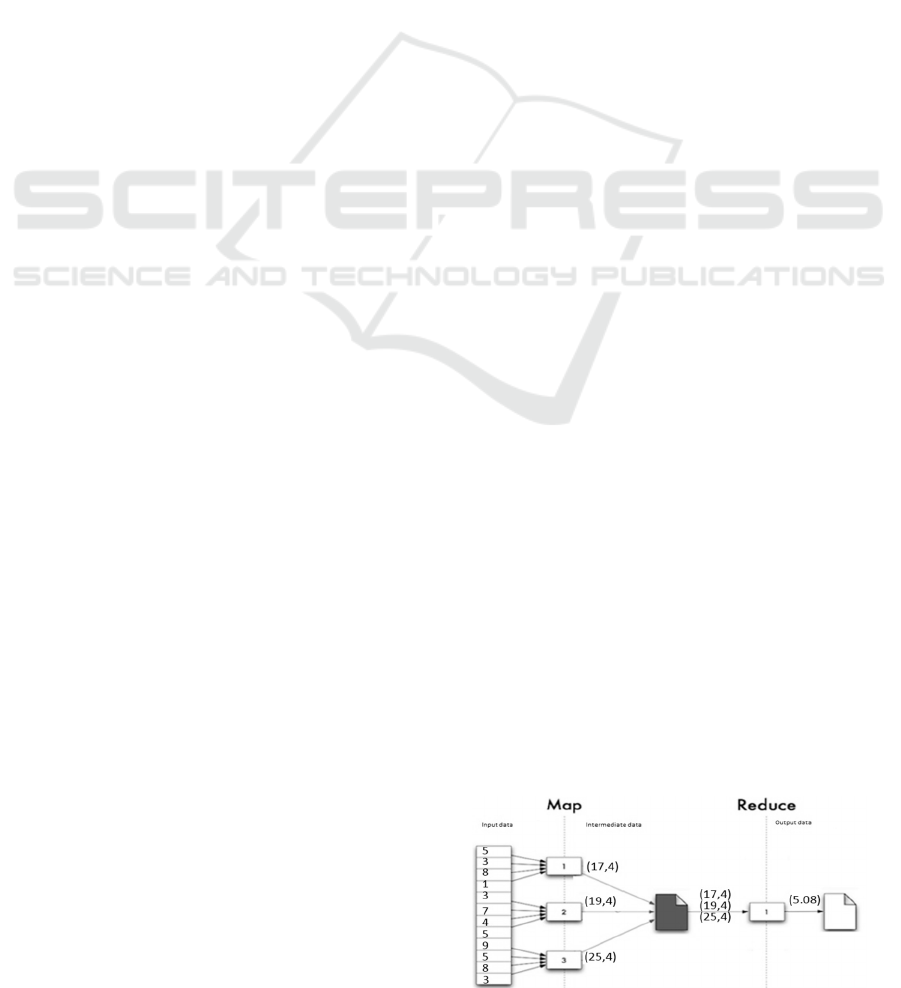
specified middleware. The general idea is to
schedule those tasks over nodes, which contain data
because moving computation near data is less
expensive than moving data where computation
units are running. For example, in figure 1, average
of input set of integers is calculated.
Hadoop (Hadoop, 2005) is one of the most well-
known implementation of MapReduce model. It is
based on two main components: Hadoop
mapReduce and Hadoop distributed file system. The
computation level (mapReduce) is composed of
three elements. It assures synchronization over
different elements and distributes resources between
jobs. The Node Manager (NM) is the responsible for
resources exploitation per slave machine. The
Application Master (AM) is responsible for
managing the lifecycle of a job; it negotiates with
the RM to obtain needed resources (containers) and
manages the execution of job’s tasks.
Hadoop distributed file system (HDFS) is composed
of NameNode (NN) as a server and DataNode (DN)
as a slave. Files in HDFS are from megabytes up to
terabytes size. The number of map tasks depends on
the number of chunks of data (Zhou, 2012), one map
per data block slice. When the scheduler cannot
assign tasks to machines where data are stored,
bandwidth on the network is allocated to migrate
blocks towards. This paper presents an offline model
of scheduling problem on Hadoop with
mathematical programming based on the time-
indexed formulations which received much attention
due to its important impact on approximation
algorithms and the quality of its linear programming
relaxation.
Figure 1: Example of mapreduce job's execution.
178
Jlassi A., Martineau P. and Tkindt V..
Offline Scheduling of Map and Reduce Tasks on Hadoop Systems.
DOI: 10.5220/0005483601780185
In Proceedings of the 5th International Conference on Cloud Computing and Services Science (CLOSER-2015), pages 178-185
ISBN: 978-989-758-104-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
It is often used in optimization and approximation
for machine scheduling problems. Besides, its linear
relaxation yields concise lower bounds than bounds
obtained by other integer programming formulations
(Queyranne, 1997). Work like (Sousa, 1992) and
(Lionel, 2013) argue that scheduling algorithms
using LP-relaxation of time-indexed formulations
have a constant ratio on their worst-case
performance in parallel machine scheduling
problems. Researches on the online version of
problem suffer from a lack of evaluation: how the
efficiency of online algorithms can be evaluated?
One way to answer this question is to consider the
offline version of the problem, its' optimal solution
can be considered as “ideal” reference schedules for
online algorithms. In this work, the main motivation
is to compute optimal solutions for medium
instances of the offline problem.
The remainder is introduced as follows. Section ΙΙ
presents the offline problem of scheduling “map”
and “reduce” tasks. In Section ΙII its' mathematical
model is introduced. Data generation and model
evaluation is presented in Section IV. Section V
summarizes the related work. Lastly, Section VI
concludes the paper and provides directions of future
work.
2 RELATED WORK
The scheduling problem in Hadoop is widely treated
in the literature: (Lim, 2014) present a constraint
programming formulation of the problem. The
objective of the model is to minimize the number of
late jobs, which is characterized by its service level
agreements (SLA). Authors consider the scheduling
of mapReduce jobs comprising an earliest start time,
execution time and end-to-end deadline. In this
work, authors take into consideration only compute
resources (slots), neither RAM nor hard disk are
considered. They neglect the relation between data
and tasks locations that present a foundation for the
map reduce programming model. The work in
(Verma, 2012) implements a deadline-based
scheduler; it is based on a general model for
computing performances bounds on makespan of a
given set of n tasks that are processed by k servers
(slots). The assignment of tasks to slots is done using
an online greedy algorithm; it assigns each task to the
slot, which has finished its running task the earliest.
(Evripidis, 2014) and (Lin, 2013) propose models,
which aim to minimize the total weighted completion
time. The first considers that each job has at least one
map and one reduce task and each job has at most
one task pre-assigned to each processor.
Table 1: Used Notations in the Hadoop scheduling
problem.
General data:
M The number of machines
N The number of tasks
N
Number of map tasks
N
Number of reduce tasks
L
Set of map tasks
L
Set of reduce tasks
A
Set of blocks on the cluster
T
The scheduling horizon
For machines
m
The number of slots on machine j (m
m
)
m
The number of reduce slots on machine j
m
The number of map slots on machine j
m
The quantity of RAM of machine j
m
The hard drive capacity of machine j
v
,
The CPU frequency associated to the slot s of
machine j
v
The CPU frequency of machine j v
∑
v
,
α
The cost of the use of one unit of ram (1 Mb) per
machine j
α
The cost of the use of one unit of hard drive
capacity
(
1 Mb
)
per machine j
α
,
The cost of the use of CPU on slot s of machine j
For tasks (map, reduce, Application node)
n
The quantity of RAM required by task i
n
The quantity of hard drive required by task i
n
The number of data block’s manipulated by task i
B
List of block numbers manipulated by task i
b
,
Maximum bandwidth between tasks i and i
n
Number of tasks preceding task i
E
Set of task numbers that must be completed before
task i start.
p
,
Estimated processing time of task i if processed on
slot s of machine j
For HDFS
S The size of a data block in the cluster.
r
Number of replication block b.
D
Set of machines on which block b is located.
bwd Bandwidth allocated for migrating a block through
the network
For the Network
G
(
V,E
)
The graph modeling the network
b
The maximum bandwidth associated to any edge
e
∈E
P A set of paths between machines, a path being a set
of edges e
P
The set of couples of machines (j, j
) which use the
edge e
OfflineSchedulingofMapandReduceTasksonHadoopSystems
179
The second considers task pre-assignment to
machines and each machine can execute one task at a
time. It models the data transfer from map to reduce
tasks and it considers map and reduce dependency.
(Kodialam, 2012) express the scheduling problem as
an optimization problem using linear programming,
they aim to minimize the total weight completion
time of jobs, they base their work on a set of
assumption: machines can process at most one task at
time, when a set of tasks is assigned to a processor at
the same moment; tasks can be preempt. Fotakis et
al. (Fotakis, 2014) consider the case of unrelated
processors with multiple Map and Reduce tasks per
job. They consider that tasks can be preempted.
They present the first polynomial time approximation
algorithm, it minimizes the total weighted completion
time. However they neglect the data management
aspect and they don’t consider multiple tasks
execution per machine. In this work we associate
resources constraints, network bandwidth
management to the data flow management.
3 THE OFFLINE SCHEDULING
PROBLEM
We summarize in Table 1 the data used in the
scheduling model. It is based on four principal parts:
the first describes the information about machines
and the cost of every resource’s use. The second part
describes tasks consumption. The third part gives
information about data blocks and the fourth
describes networks architecture. We consider non-
pre-emptible tasks because, in practice, tasks will
not be interrupted in Hadoop and when a task fails, it
will rerun as it is newly submitted.
Notice: we assume that bandwidth is booked on the
network from the end of map tasks until the end of
the reduce tasks. The bandwidth reservation avoids
delaying job execution when reduce tasks need to
communicate with maps machines to ensure some
needs (system files, recovers broken data chunks)
(White, 2012).
4 A MATHEMATICAL
FORMULATION
This section presents a time-indexed formulation of
offline scheduling problem in Hadoop. Let us review
the formal definition of the model. We adapt the
interval-relaxation method proposed in (Dyer, 1990)
in single machine case, and in (Schulz, 2002) in
multiple machines, with the context of MapReduce
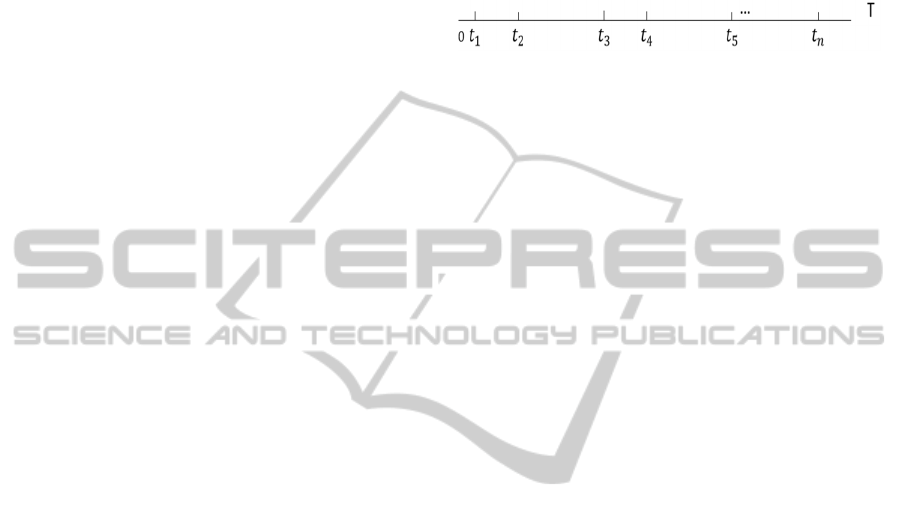
model. The time horizon T is divided into a set of
irregular intervals. These intervals are defined by the
potential dates of starting and finishing execution of
tasks. For example, in Figure 2, for ∈
0, 1
,
the intervals (t
,t
are used to execute tasks,
where
∈
0,
.
Figure 2: Presentation of the index over time.
We use the following variables:
x
,,
q, the amount of time period,the tas
k
iis
processedon slot s of the machine j
in
(
t
,t
0,otherwise
Thus x
,,
p
,
specify that the task is being
processed on machine j during the time
interval (t
,t
.
y
,
,
1,if bloc
k
b is on machine j at
t
,t
after a migration from j
0,otherwise
u
,
,
1,if bloc
k
bisbeing migrated from
machine j to j
at
,
0,otherwise
z
,
,
,
1,if a map tas
k
l
is processed on
machine j
and is finished at time t and
a reduce task l is processed on machine j
and finished after
.
0,otherwise
We refer to TST as the total time spent for
processing all tasks on the cluster and TRC as the
total resource cost induced by the execution. The
scheduling problem in Hadoop can be modeled with
the objective functions (1) and (2). The TST (1)
considers the total execution time of tasks (the first
term on the left-hand side of the equation) and the
time of data transfer between map and reduce tasks
(the second term on the right-hand side of the
equation). The TRC (2) considers the resources
machines’ cost when processing tasks (the first term
on the left-hand side of the equation) and the use of
resources due to data transfer (the second term on
the right-hand side of the equation). The constraints
of the model are classified in three categories:
resource constraints, processing constraints and the
network constraints.
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
180

Minimize TST
x
,,
p
,
y
,
,
S
b
,
∈
,
∈
,∈
(1)
Minimize TRC
x
,,
α
n
α
n
α
,
(y
,
,
u
,
,
)(α
n
∈
α
n
)
(2)
In the subsection 4.1, constraint (3) guarantees that
no more memory than available is used. Constraints
(4) and (5) guarantee that the number of reduce
(resp. map) tasks running on machine j at time t is
less than the number of reduce slots (resp. map
slots). Constraint (6) ensures that the overall local
disk space used (by the assigned tasks and migrated
data) cannot exceed the availability of each machine.
In the subsection 4.2, the inequality (7) guarantees
the precedence relation between map and reduce
tasks associated to the same job are satisfied. If we
have many map tasks, reduce tasks are scheduled
after the schedule and the end of all map tasks. In
figure 1, we compute average of input data, we will
have wrong result if reduce tasks start before the end
of map tasks. Constraints (7) and (8) ensure that all
map tasks (resp. reduce tasks) must be processed.
In the subsection 4.1, the constraints define the
policy of data blocks management in Hadoop. The
inequality (10) specifies if block b is stored in HDFS
on machine j. The constraints (11) and (13) impose
the relation between y’s and u’s variables, constraint
(13) triggers data migration to ensure that block
must be available on the machine before a map task
starts and constraint (11) ensures if it is available on
a machine after it has been migrated. The
Inequalities (12) disable the start of map tasks
(imposed by the constraint 8) if the manipulated
blocks are not present on the machine on which they
have been assigned. The inequalities (15) enable to
fix the values of the z
,
,
,
variables. When the tasks
map and reduce are on the same machine, we don’t
have network communication and the right part of
inequality (15) will be 0.
4.1 Resources Constraints
n
x
,,
p
,
m
∀j1…M,∀t
1…T
(3)
x
,,
p
,
∈
1
∀j1…M,∀t
1…T,∀s1…m
(4)
x
,
,
p
,
∈
1
(5)
∀j1…M,∀t
1…T,∀s1…m
n
x
,,
p
,
S(b)(
y
,
,
u
,
,
)
∈
,
m
(6)
∀j1…M;∀t
1…T
4.2 Tasks Constraints
n
∗
x
,,
p
,
x
,
,
p
,
∈
(7)
∀
k
∈L
, ∀t
0…T1,∀ j1…M,∀s
1…m
x
,
,
p
,
1
∀l∈L
(8)
x
,,
p
,
1
(9)
∀l∈ L
OfflineSchedulingofMapandReduceTasksonHadoopSystems
181
4.3 Constraints Associated to the
Migration of Data Blocks
y
,
,
1 ,∀ j∈ D
0 ,∀ j∉D
∀t
0…T,∀b∈A
(10)
u
,
,
y
,
,
(11)
∀ b∈A
;∀t
1…T1;∀ j,j
1…M;jj
′
u
,
,
u
,
,
x
,
,
p
,
∈
(12)
∀ b∈A
;∀t
0,…,T1;∀ j,j
1…M,jj′
x
,
,
p
,
y
,
,
u
,
,
(13)
∀l∈L
; ∀ b∈B
;∀t
0,…,T1;∀ j1…M
4.4 Network Constraint
These constraints define the use of the network in
terms of bandwidth. Constraint (14) imposes that all
consumed bandwidth (for migration and transfer of
data) is less than the maximum bandwidthb
.
bwd u
,
,
z
,,
,
∈
∈
(
,
)
∈
∗ b
,
b
(14)
∀e∈E; ∀t
1,…,T1
x
,,
"
p
,
x
,
,
p
,
1
,
,
,
(15)
∀l∈L
,∀l
∈E
;∀t
0,…,T2;∀t
0,…,t
;∀t
"
t
,…,T1;∀ j,j
1…M,j
j
5 EXPERIMENTATION
This article implements a model and tries to find
solutions using CPLEX mathematic solver. Face to
the multi-criteria property of the problem, the model
is concentrated on the time execution aspect and
neglects cost execution of the job. It uses an
experiment setting for the evaluation of the model
using the methodology in (Lionel, 2013). Data input
of the model presents an important deal and imitates
real world tasks executions. Machine configuration is
extracted from AWS (Aws, 2014) and portioned in
three categories of machines. Tasks information
depends on the size of data input computed by every
task. In order to evaluate the persistence of the
model, we generate randomly four input data
concerning tasks following uniform law: memory,
disk consumption, the time execution per task and
location of data blocks (Gupta, 2013). We generate
also network and cluster configuration details. Table
2 synthetizes values of the expected data input of
machines. The first column indicates the category of
the machine.
The second column indicates the number of core
CPU on the machine. The third one contains the
amount of memory per machine. The column number
four indicates the quantity of hard disk in Gb. The
fifth column contains the frequency of one core CPU
on the machine. The sixth column indicates the
bandwidth allocated for network communication.
Table 2: Types of generated physical machines.
Category CPU
node
RAM
(Gb)
SSD (Go) CPU freq per core (GHZ) Bdw
(GB)
α
α
α
,
Slots
map
Slots
reduce
c3.2xlarge: co
pute
optimized
8 15 160 2.8 Intel Xeon E5-2680v2 1 1 1 2 5 2
i2.2xlarge:
storage optimized
8 61 1600 2.5 Intel Xeon E5-2670v2 1 3 5 2 4 3
r3.xlarge:
memory optimized
4 30.5 160 2.5 Intel Xeon E5-2670v2 2 2 1 1 2 1
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
182
Table 3: Characteristics of used jobs.
Job Tasks reduce Tasks map Type of Job
1 2 3 --
2 2 6 --
3 3 9 --
Columns number seven, eight and nine indicate
respectively the unit cost of the memory use (unit =
16Mb), hard disk (unit = 1Gb), and a core of CPU.
Despite the evolution in Hadoop, we adopt the
principle of separation between slots; the last two
columns contain the number of reduce and map cores
(slots) per machine. The costs of resources
consumption are expressed in columns seven, eight
and nine and they depend on the type of machine.
We generate the completion time needed to treat
tasks; these values depend on the size of the block.
We define:
P
,
TimeStartUpVMS∗nt
(
l
)
∗
vs
(
l,j,s
)
10 ∗ SpeedProcessorRate
(16)
We take into account the needed time to start up
virtual machines TimeStartUpVM, the size of block
and the amount of data computed per GHz per unit
of time SpeedProcessorRate. We benefit from the
last variable to inject the random aspect depending
on the categories of machines: for the category
“compute optimized”, SpeedProcessorRate ∈
160,320
for the other types
SpeedProcessorRate ∈
80,160
.The estimation of
memory
(
n
)
and hard disk consumption (n
)
depends on the type of the job. Table 4 summarizes
used formulas in the generation of data related to the
three types of jobs: the number of tasks per job is
relatively limited; CPLEX limitation imposes this
choice of number of task per job face of the use of
one big job. We inject random values at many levels
of the data input generation. Face to the large
quantity of data generated by the model in time
indexed formulation, we consider S=64Mb and its
replication is equal to one. We consider the same
size (S) and replication properties of data blocks
however we generate randomly the location of the
blocks on machines. The network bandwidth for
block migration is fixed by the formula bwd
min
S ∗ 0.2,128
. Network is generated as a binary
tree. We repeat the following process: at the main
node, we generate a switch; its left child node will
be one physical machine selected randomly, the
right child will be another switch and so on until all
physical machines will be placed on the binary tree.
Table 5 describes scenarios used for the model’s
test. For each scenario, we randomly generate 20
instances. The time horizon depends on scenarios
and it is divided in intervals. To find the correct
value of time horizon, we define an upper bound for
every solution using this formula (17). If there is no
solution for a particular value of the time horizon,
we increment time horizon by a unit of time. We
consider that an interval (
t
,t
from figure 2) is
sufficient to transfer data block between machines.
In conclusion, we limit bandwidth threshold to
migrate blocks and we limit the transfer duration of
a block to one interval. To compute the real
duration’s value of a schedule per scenario, we
define “RealTime” (formula 18) as the real time
needed to execute tasks in a solution.
Tinteger
N
TotalSlotMap
N
TotalSlotReduce
2
(17)
RealTime
∑
max
..
..
(
)
∈
x
,,
(18)
RealValueOfTimeHorizonUnit
RealTime/T
(19)
“RealTime” is a posterior computation, after the
compute of the scheduling solution.
Table 4: Basic formulas to generate memory and hard disk
consumptions per task.
Type of
Job
n
n
∗S∗X
Y
n
(n
∗S∗WZ)/102
4
(1) CPU
intensive
X
Y
∈
0.3,0.6
WZ∈
13,26
(2) RAM
intensive
X
Y
∈
0.4,0.8
WZ∈
30,46
(3) I/O
intensive
X
Y
∈
0.6,1
WZ∈
46,76
Table 5: Different scenarios for the generation of tasks,
machines and blocks input data.
ScenariosN1N2N3M1M2 M3
Blocks
N M
T
1 1 1 0 1 1 1
10
13 3
3
2 3 0 0 0 2 0
10
15 2
3
3 1 1 1 1 1 1
10
25 3
9
4 3 3 0 0 0 2
10
39 2
15
5
6 0 0 1 1 1
10
30 3
7
623111 0 10 46215
7
3 1 1 0 2 0 10 35 2 6
OfflineSchedulingofMapandReduceTasksonHadoopSystems
183

Table 6: Computational results (20 instances per scenario).
#InFeas #Solved MemLimit TimLimit
N
N
N
T
T
T
max
Real value of
unit of T
Sc1 0 20 0 0 0 7.95 132 0 0.45 1 85.66
Sc2 0 20 0 0 27 42.5 164 0 19.04 174 95.66
Sc3 1 18 0 1 4 5357.6 62168 6 97.75 1044 122.4
Sc4 3 16 1 0 0 6675.15 28365 16 292.36 1313 54,8
Sc5 2 18 0 0 40 132.8 1791 10 66.9 757 94.62
Sc6 4 15 0 1 115 142 389 28 185 1641 126.23
Sc7 0 20 0 0 3 61.25 193 5 10.1 22 70.53
It is used to compute the real duration to execute
jobs in a scenario. We define established value as the
time Horizon T per scenario; we compute a value of
a unit of T as regular time horizon with the formula
(19). We enumerate the minimum, maximum and
average of the RealTime over iterations and we
choose the maximum value to compute the value of
a unit of T per scenario. This value is used in the
evaluation of the results of solutions.
To test the model, we use a PC with an Intel(R) Core
(TM) i5-3360M CPU with 4 cores at 2.8 GHz and 4
Gb of RAM. The linear program formulation has
been solved by CPLEX 12.2 with parallel solve (4
threads) and limit time 1800 seconds and memory
limit of 2 Gb of RAM. When the time limit or the
memory limit is reached, the given solution of the
instance will be declared unsolved. Otherwise,
CPLEX will return the best solution. For each
scenario, table 6 presents: the number of infeasible
instances (column #InFeas), the number of instances
solved to optimality (column #Solved). The number
of instances on which CPLEX stops due to the
memory limit (column Mem) and the number of
instances on which CPLEX stops due to the time
limit (column Time). The columns from number six
to number eight provide the minimum, maximum
and average number of nodes explored by CPLEX in
its branch and cut algorithm while solving the
problem. There is no relation between the number of
machines and the number of explored nodes.
Scenarios 4 and 6 have two machines each, however
the number of explored nodes in scenario 4 is largely
higher than the number of nodes explored in
scenario 6. In the same topic, the number of
explored nodes is independent from the number of
scenario 7 for example has a number of tasks to
schedule higher than scenario 5. However, the
number of node explored in scenario 5 is higher than
in scenario 7. The columns from number nine to
number eleven provide minimum, average and
maximum CPU time (in seconds) taken by CPLEX
to solve instances. In this topic, we consider only
instances, which have infeasible or feasible results.
The result shows that there are large disparities
concerning CPU times used to find solution. The last
column presents the real value of the time horizon
unit; it is used as a comparison reference. It is
extracted from the approximate value of the average
completion time per scenario. Results of founded
schedule time of a scenario argue that it depends on
the number of tasks and machines; Scenarios 4 and 6
have largest value of the time horizon. These
scenarios have the largest number of tasks to
schedule. Scenarios 1 and 2 have the smallest
number of tasks and the smallest number of
machines in an instance. Results are function of the
number of tasks and the number of machines in an
instance and some instances take more time to find
solution than others. Scenario 6 for example
schedules 46 tasks on two machines; it has the
largest value of completion time.
6 CONCLUSIONS
In this paper, we propose an offline mathematical
model for the scheduling problem in Hadoop. Two
kinds of tasks are considered: “map” and “reduce”
tasks with dependencies between them. This paper
also presents an in-depth study of the major aspects
of MapReduce model, such as tasks dependency,
network consumption, data flow management and the
non-interruptive tasks executions.
It aims at scheduling tasks with the minimum cost of
used resources and the minimum total processing
duration. We merely focus on a pure scheduling
problem; we propose an offline model assuming that
all data are known. We present a realistic model,
which considers dependence between tasks. We
consider data locality and we model data migration
and transfer between heterogonous machines. All
considered constraints emulate the real world
environment in Hadoop. Heterogeneous machines
cluster and possibility to execute many tasks per
machine are also considered. The proposed model is
based on a time-indexed formulation, which despite
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
184

its pseudo polynomial number of variables. It has
already been shown as an efficient formulation
compared to other integer programming
formulations. We use the commercial solver CPLEX
to find the optimal solution for small and medium
size of instances. We give community a boundary to
reference with and to evaluate their scheduling
algorithms for this size of instances. It turns out that
the offline problem is interesting in it self and can be
used to design good online strategies. Solution for
this model would be a reference for the on-line
schedules in smaller dimension to validate first
result. Future work will deal with the online aspect
concerning the scheduling problem; we plan to
propose a heuristic solution and use this work in the
evaluation.
Online solution considers at first Total completion
time, in a second time we take into account the
resources consumption (energy) in a multi-criteria
scheduling aspect.
The final solution will be implemented over Hadoop
simulation system and evaluated in a large
scalability face to default scheduler in Hadoop.
ACKNOWLEDGMENTS
This work was sponsored in part by the CYRES
GROUP in France and French National Research
Agency under the grant CIFRE n°2012/1403.
REFERENCES
Aws. 2014. Instances-types. Retrieved from Aws:
http://aws.amazon.com/fr/ec2/instance-types/
Dean, J., & Ghemawat, S., 2004. MapReduce: Simplified
Data Processing on Large Clusters. In
Communications of the ACM.
Dyer, M. E., & Wolsey, L. A., 1990. Formulating the
single machine sequencing problem with release dates
as a mixed integer program.
Evripidis Bampis, V. C., 2014. Energy Efficient
Scheduling of MapReduce Jobs. In 20th International
Conference.
Fotakis, D., Milis, I., & Zampetakis, E., 2014. Scheduling
MapReduce Jobs on Unrelated Processors. In the
Workshop Proceedings of the EDBT/ICDT.
Gupta, S., Fritz, C., Price, R., Hoover, R., de Kleer, J., &
Witteveen, C., 2013. Throughput Scheduler: learning
to schedule on heterogeneous Hadoop clusters. In
(ICAC '13), International Conference on Autonomic
Computing.
Hadoop Project, 2005. (A. foundation, Producer)
Retrieved from http://hadoop.apache.org/
Kodialam, M. S., Lakshman, T., Mukherjee, S., Chanwg,
H., & Lee, M. J., 2012. Scheduling in mapreduce like
systems for fast completion time. In Patent
Application Publication.
Lim, N., Majumdar, S., & Ashwood-Smith, P., 2014. A
Constraint Programming-Based Resource
Management Technique for Processing MapReduce
Jobs with SLAs on Clouds.
Lin, M., Zhang, L., Wierman, A., & Tan, J., 2013. Joint
Scheduling of Processing and Shuffle Phases in
MapReduce Systems. In P. o. Conference (Ed.).
Lionel, E.-D., Adrien, L., Patrick, M., Ameur, S., Vincent,
T., & Denis, T., 2013. A Server Consolidation
Problem: Definition and Model. In Proceedings of the
14th conference ROADEF.
Queyranne, M., & Schulz, A., 1997. Polyhedral
Approaches to Machine Scheduling. In Mathematical
Programming.
Schulz, A. S., & Skutella, M., 2002. Scheduling Unrelated
Machines by Randomized Rounding. In SIAM Journal
on Discrete Mathematics.
Sousa, J. P., & Wolsey, L. A., 1992. A time indexed
formulation of non-preemptive single machine
scheduling problems. In Mathematical Programming.
Verma, A., Cherkasova, L., Kumar, V. S., & Campbell, R.
H., 2012. Deadline-based Workload Management for
MapReduce Environments: Pieces of the Performance
Puzzle.
White, T., 2012. Hadoop, The Definitive Guide (3rd
Edition ed.). O'REILLY. 3
rd
edition.
Zhou, W., Han, J., Zhang, Z., & Dai, J., 2012. Dynamic
Random Access for Hadoop Distributed File System.
In (ICDCSW), Distributed Computing Systems
Workshops.
OfflineSchedulingofMapandReduceTasksonHadoopSystems
185
