
Methods of Interaction Between Multiprotocol Unit and Telematics Map
Cloud Service
Chuvatov Mikhail, Glazunov Vadim, Kurochkin Michail and Popov Serge
Telematics department, Saint-Petersburg State Polytechnic University, Saint-Petersburg, Russia, 195251
Keywords:
Multiprotocol Unit, Telematics Map, Cloud Service, Vehicle Wireless Network, Intellectual Conveying
System, Dynamic Routing Protocols.
Abstract:
Continuous access to the service from the moving vehicle improves safety and provides ecological compatibil-
ity of transport infrastructure functioning in big agglomerations conditions. The lack of the guaranteed signal
level of global and local networks requires new approaches to form the strategy for connection continuity pro-
vision. We offer the technology enabling to form the transport facility network by appealing multiprotocol unit
and telematics map. The method suggest using external data concerning global and local wireless networks
in each vehicle. The approach involves collecting networks data by means of the multiprotocol units, trans-
mitting of these data into cloud service of telematics map, the data generalisation and to meat the query about
available networks in the vehicles vicinity. The completely automatic technology of data control is designed
in such a way that it can provides external data for multiprotocol routing in integrated vehicle networks. In
order to check the suggested approach we performed experiments and dives the information system prototype
that demonstrated its efficiency. Technical feasibility of the information system was confirmed during the
experiments.
1 INTRODUCTION
Evolution of the telecommunication components of
intelligent transport systems involves the continu-
ous bidirectional communication between the vehi-
cle and cloud services through V2V, V2I mecha-
nisms (Zaborovskiy et al., 2013; Zaborovski et al.,
2013). The stable connection at any point along the
route of the vehicle performs MPU (Cheng et al.,
2010; Ku et al., 2014), which supports the connec-
tion of the vehicle to multiple networks by different
technologies. While driving on the highway MPU an-
alyzes the current state of available wireless networks
and connects the vehicle to the best of them (Jaworski
et al., 2011).
The fundamental problem is the limited range of
available networks: the vehicle can get information
about available DSRC and Wi-Fi networks in the ra-
dius of 300 meters, but it is impossible to construct
a map with all the connectivity options along the en-
tire route, including the network 3G/4G (Gramaglia
et al., 2011; Remy et al., 2011). On the other hand
the presence of a complete list of telematic resources
located on the route of the vehicle, would eliminate
the costs of implementing local dynamic routing pro-
tocols that create multiple additional service traffic
on the wireless network which negatively affects the
bandwidth (Glazunov et al., 2013).
An alternative to the local dynamic routing can
be external routing is based upon the cloud service
telematics map. Telematics map shows a set of
telematic resources in the region of the generalized
time (Glazunov et al., 2013; Zaborovsky et al., 2011).
In this case, telematics card is used as a repository of
data about the location and the network access point
parameters. Then the problem of data management
telematics map is in continuous data collection, pro-
cessing and transmission of data on telematics en-
vironment with geographic coordinates and time of
each vehicle is connected to the system. Continuous
interaction of a large number of mobile subscribers
generates a large amount of raw data that requires
adaptation algorithms for acquisition, processing and
transfer between users.
The solution is to develop an adaptive algorithm
interaction between multiprotocol unit and the telem-
atics map cloud service in order to minimize the vol-
ume of service traffic and maximize the connection
time to the network.
161
Mikhail C., Vadim G., Michail K. and Serge P..
Methods of Interaction Between Multiprotocol Unit and Telematics Map Cloud Service.
DOI: 10.5220/0005491501610166
In Proceedings of the 1st International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS-2015), pages 161-166
ISBN: 978-989-758-109-0
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
2 THE INTERACTION
ALGORITHM OF CLOUD
SERVICES BETWEEN
TELEMATICS MAP AND
MULTIPROTOCOL UNIT
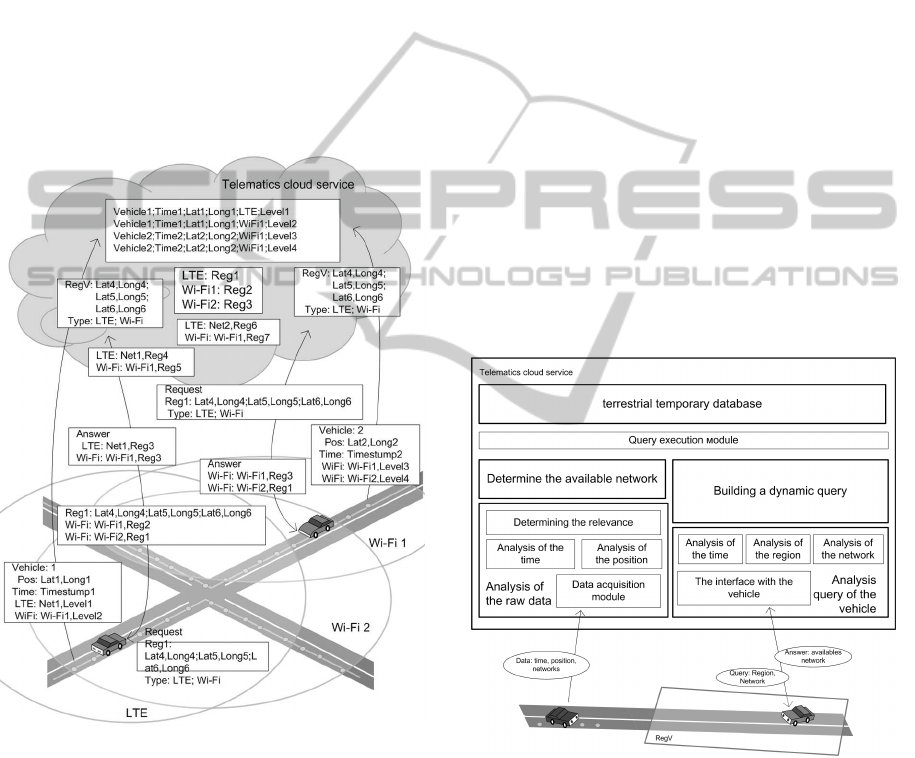
Telematics map cloud service also ensures data ac-
cumulation about potential access points to the Inter-
net, which includes the signal level and access mode.
This can be used for various technologies such as
LTE, DSRC, stationary Wi–Fi, and vehicle MESH
network. Figure 1 shows part of the internal descrip-
tion of the telematics map and its interpretation on the
roads map.
Figure 1: Access points to telematics resources and their
geographic interpretation chart.
To solve this problem, telematics service provides
a set of low-level map management techniques to in-
sure bidirectional exchange depending on the hard-
ware and software features of the multiprotocol unit.
The main methods should include:
1. The primary data collection about:
• interfaces status of the telematics devices in the
vehicle;
• interfaces sharing;
• signal levels available in networks on each ve-
hicle interface during movement;
2. Data aggregation on the network environment in
a specific geographic location.
3. Response to query about telematics capabilities in
the geographic region.
The main technological challenge is to maintain
the service state of the relevance of telematics envi-
ronment data. The system provides to each vehicle
the continuous data collection and systematisation on
the network state in asynchronous mode.
Interaction multiprotocol unit vehicle and cloud
service consists of three stages:
• transmitting data about telematics environment
from the vehicle;
• aggregation of data about position and access time
from access points;
• data about the available networks back to board
the vehicle.
Interaction scheme between software modules in
a telematics map and multiprotocol unit is shown in
Figure 2.
Figure 2: Modules interaction between cloud service telem-
atics map and MPU.
Periodic polling of signal level of global and local
networks is carried out continuously on multiproto-
col unit. The frequency of the survey depends on the
speed of the vehicle. Data is written to a local file
on MPU and will be transferred to the cloud service
upon the occurrence of the right moment: for example
if there is a wide or free link to the cloud.
Generalisation of the transmitted data on the net-
work state on the cloud is performed in the module
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
162
based on two criteria: the network availability and the
time-averaged signal level at the current point.
If necessary, each node (MPU) performs request
to the cloud service, transferring data on the parame-
ters of their technical means and the desired region to
obtain data on telematics environment.
Selection of available networks is based on net-
work’s spatiotemporal database query for each net-
work type with a vehicle’s predetermined region.
The interaction of the vehicle and the cloud ser-
vice for the data transmission about the available
telematics resources is performed via local or global
communications channels available on MPU.
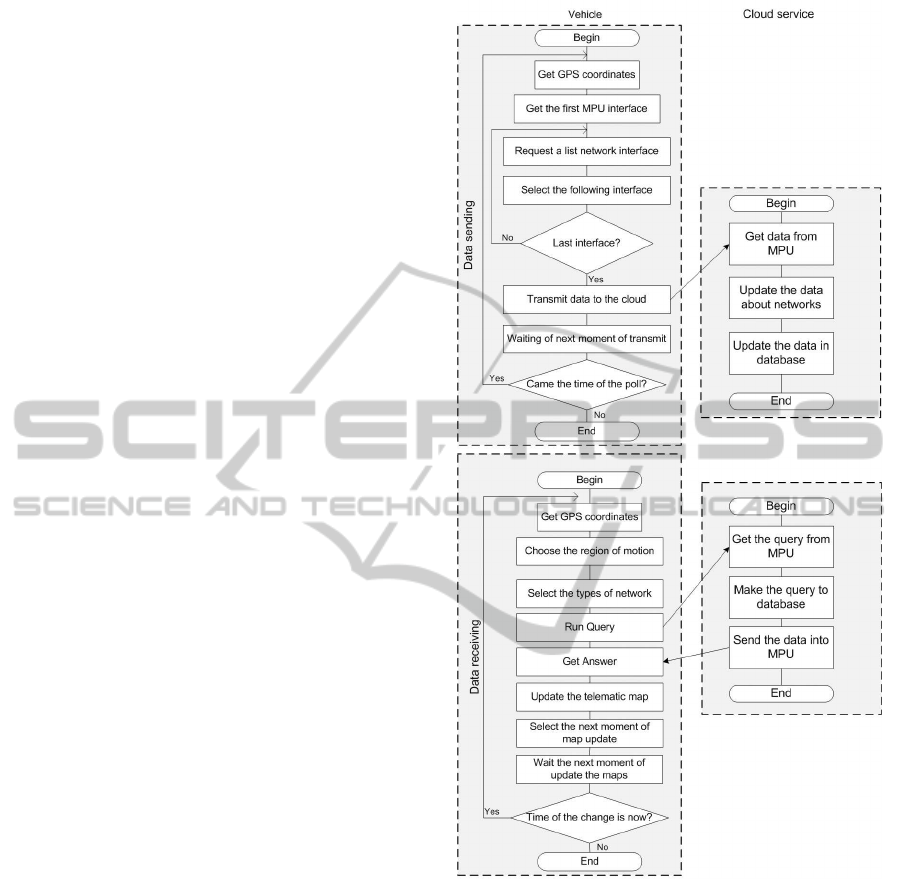
Interaction algorithm between the vehicle and
cloud service is implemented by means of data col-
lection and evaluation about the network state.
Parts of the algorithm are distributed between
multiprotocol node modules and analysis query mod-
ule of the network status of cloud service. They pro-
vide dynamic frequencyselection survey of Wi-Fi and
LTE networks, depending on the speed. The flowchart
is shown in Figure 3.
The proposed concept and interaction algorithms
are implemented in the layout of data collection and
processing of telematics environment.
3 IMPLEMENTATION OF
INTERACTION BETWEEN
MULTIPROTOCOL UNIT AND
TELEMATICS SERVICE MAP
Implementation of algorithms interaction between
multiprotocol node and cloud service is carried out
by technical means of hardware and software testbed
of multiprotocol nodes (Popov et al., 2014). For the
experiment testbed was assembled shown in Figure 3.
Multiprotocol node is equipped with a GPS BU–
355S4 receiver, built-in Wi–Fi AR9285 adapter of
802.11bgn standard and 4G M100–4 modem for data
transmission.
The functions of MPU include periodic status
query for Wi-Fi and LTE networks. Data are collected
into a local file, and then sent to the server via LTE
channel.
The functions of the server is to receive the data
file, placing the original data in the database, the im-
plementation of a selection query in view of geo-
graphical and temporal parameters and the response
to a multiprotocol unit request. To perform these
functions on MPU and server the application pack-
ages are used: the database server MySQL and com-
munication channel openvpn. Registration of Wi-Fi
Figure 3: Interaction modules cloud service telematic maps
with multiprotocol node.
parameters and GPS coordinates is carried out using
the program kismet, LTE registration is performed by
periodic calls of AT-command ”CSQ”. These pack-
ages function in the operating system Linux Debian
7.4 on both the server and the MPU.
Scheme of interaction testbed software is shown in
Figure 4. Initial values for the experiment are shown
in Table 1.
Frequency of coordinate obtaining from the GPS
receiver is limited to 2 Hz due to the implementation
constraints of the average receiver chip range. Be-
sides, the device driver operates at a speed 4800bit/s
through a local communications port.
MethodsofInteractionBetweenMultiprotocolUnitandTelematicsMapCloudService
163
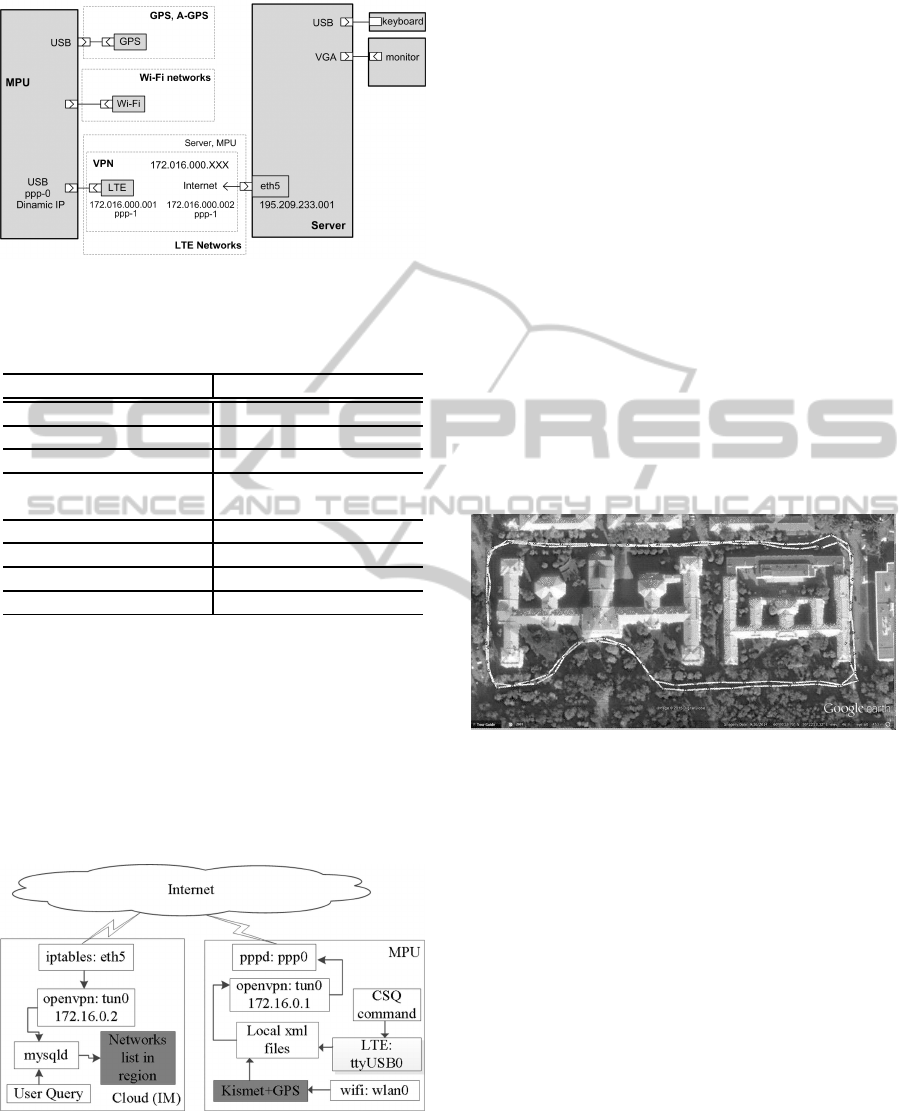
Figure 4: Hardware and software stand configuration for the
experiment.
Table 1: Initial values for hardware and software environ-
ment.
Parameter Value
The path length, km 3,21
Coordinates source GPS
Data storage method In local file
Coordinates polling
rate, Hz
2
Wi-Fi polling rate, Hz 10
LTE polling rate, Hz 2
Traffic type UDP
Channel type Tunnel over LTE
The advantage of the installed software is the
polling frequency of local and global networks does
not depend on the GPS devices polling frequency,
which enables to run these processes in different
threads of the operating system and improves the sig-
nal representation accuracy. Scheme of software in-
teraction to survey local and global networks on MPU
is shown in Figure 5.
Figure 5: Software interaction chart for scanning the local
and global wireless networks.
4 TESTING OF SCANNING
TECHNOLOGY FOR
WIRELESS NETWORKS
AVAILABLE FROM THE
VEHICLE
To verify the algorithm operability and data manage-
ment technology of telematics map, we’ve conducted
a series of field experiments in the driving conditions
of the vehicle with different average speed in a real ra-
dio situation of a large city. Main goal of these experi-
ments was to demonstrate the operability of proposed
algorithm during collection, processing and transmis-
sion of data about global and local wireless networks
while driving the vehicle in city traffic conditions. For
this purpose the multiprotocol unit prototype was in-
stalled on the vehicle which moves on predefined ring
route. In motion, the multiprotocol unit collects data
with signal level of available global and local wireless
networks. Vehicle’s trajectory is shown on Figure 6.
Figure 6: Vehicle’s driving route.
Experiment, which shows the operability of the
data collection technology, consisted in continuous
screening of global and local wireless networks for
availability and signal levelfrom the vehicle. For each
stage of experiment we determined average speed and
calculated driving time, number of GPS points, num-
ber of global and local networks polls, number of reg-
istered local networks, average signal level at given
point and the network working range. Summary re-
sults of this experiment are shown in Table 2.
During our experiments consisting of collection
and transmission of data about available wireless net-
works we’ve revealed the dependencies of transmit-
ted data size and number of networks on the average
vehicle’s speed under stable radio conditions. Fig-
ure 7 shows charts with dependencies of number of
networks and transmitted data size on the average ve-
hicle’s speed. Charts show that the number of regis-
tered stationary wireless networks drops with increase
of average speed, which is explained by decrease in
polling rate due to route length. Transmitted data
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
164
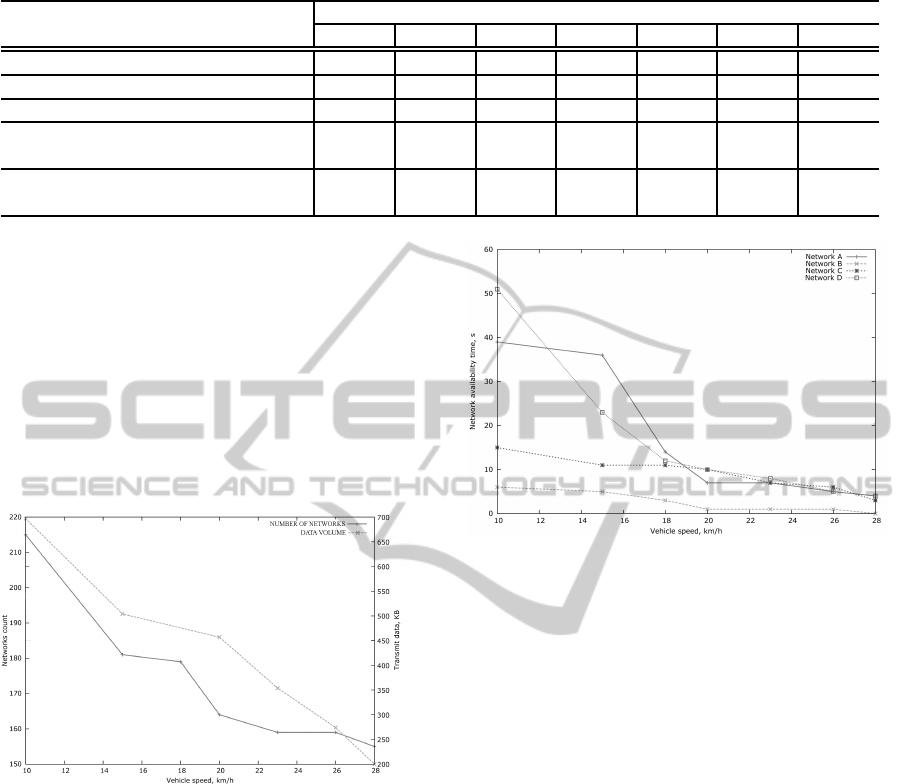
Table 2: The parameter values.
Parameters
Vehicle speed
10 15 18 20 23 26 28
The driving duration, min 16 10 8 7 6 5 4
Data amount, KB 697 504 480 457 354 274 200
Average signal level LTE, dB -59 -64 -65 -67 -67 -68 -69
Number of registered networks Wi–
Fi, num
215 181 179 164 159 159 155
Average visibility time of Wi–Fi net-
works, s
28 19 10 7 6 4 3
size dramatically drops too with increase of average
speed owing to decreasing number of registered net-
works and decreasing polling rate, which is caused by
shortening the time spent on the route. This allows
to draw a conclusion about the multiprotocol unit’s
operational efficiency for the purposes of signal level
registration of global and local networks. Figure 8
shows dependency between visibility time of station-
ary wireless network by the vehicle’s multiprotocol
unit and vehicle’s average speed by the example of
four wireless networks.
Figure 7: The number of detected networks and the volume
of data for different the average speeds of the vehicle.
The volume of transmitted data decreases linearly
with the increase in the average speed as a conse-
quence of reducing the number of registered net-
works. As a smaller number of polls to the network
is caused by a decrease in travel time, which leads to
the conclusion about the effectiveness of the multi-
protocol node in signal level registration of local and
wide-area wireless networks.
Figure 8shows the dependence of the availability
of fixed wireless network access point from multipro-
tocol node with the average vehicle speed for the four
networks.
The graph shows that for all achieved average ve-
hicle speeds range,networks availability is reduced
by no more than 35%, which reliably provides their
registration by technical means from multiprotocol
nodes.
Figure 8: availability duration of the wireless networks for
different average speeds of the vehicle.
Study of the dependence of LTE signal levels
shows a trend to some reduction in the ratio ”sig-
nal to noise” at higher speeds, but that does not dis-
connect link or reducing the speed of data exchange
between the multiprotocol unit and the hardware-
software testbed of telematic map cloud service. To
demonstrate the efficiency of data obtaining from the
telematics maps a series experiments was carried out.
In each experiment in each vehicle position the query
in of telematics maps cloud service was executed. The
results are compared with the radio environment.
To this end, the vehicle moving along the path
as shown in Figure6, polls the GPS sensor, runs the
queries to the telematic maps database, registering
current values of radio environment, and checked
their compliance with the data obtained from the
telematics service.
Figure 9 shows the results of comparison with
wireless networks identifiers that are received directly
on multiprotocol unit and those from cloud telematics
map database. The histogram shows sustainable coin-
cidence of the networks lists derived from cloud ser-
vice and those directly found in the air. This suggests
the applicability of the proposed technology for ob-
taining wireless networks lists from cloud telematics
service at all vehicle’s speeds.
MethodsofInteractionBetweenMultiprotocolUnitandTelematicsMapCloudService
165

Figure 9: The histogram of the number of coincided wire-
less networks names between cloud and the multiprotocol
unit.
5 CONCLUSIONS AND FUTURE
WORK
The described technological environment of telematic
maps cloud service and multiprotocol unit interact-
ing with it provides data management of local and
wide area wireless networks in the moving vehicle.
This expands the of multiprotocol routing possibility
in heterogeneous vehicles networks by increasing the
visibility scope of the vehicle networks. Further de-
velopment of the work should be the realization of
user’s uninterrupted access to the network, by fore-
casting the most suitable moments and data channels
inside the software procedure of the routing multipro-
tocol node.
ACKNOWLEDGMENTS
This research was supported by a grant from the Ford
Motor Company. This paper was funded by RFBR
grant 13-07-12106.
REFERENCES
Cheng, Y.-H., Kuo, W.-K., and Su, S.-L. (2010). Design and
implementation of heterogeneous network manage-
ment algorithm. In Signal Processing (ICSP), 2010
IEEE 10th International Conference on, pages 2464–
2467.
Glazunov, V., Kurochkin, L., Kurochkin, M., and Popov, S.
(2013). Instrumental environment of multi-protocol
cloud-oriented vehicular mesh network. In Ferrier, J.-
L., Gusikhin, O. Y., Madani, K., and Sasiadek, J. Z.,
editors, ICINCO (1), pages 568–574. SciTePress.
Gramaglia, M., Bernardos, C. J., and Caldero’n, M. (2011).
Seamless internet 3g and opportunistic wlan vehicular
connectivity. EURASIP J. Wireless Comm. and Net-
working, pages 183–183.
Jaworski, P., Edwards, T., Moore, J., and Burnham, K.
(2011). Cloud computing concept for intelligent trans-
portation systems. In Intelligent Transportation Sys-
tems (ITSC), 2011 14th International IEEE Confer-
ence on, pages 391–936.
Ku, I., Lu, Y., Gerla, M., Ongaro, F., Gomes, R., and
Cerqueira, E. (2014). Towards software-defined vanet:
Architecture and services. In Ad Hoc Network-
ing Workshop (MED-HOC-NET), 2014 13th Annual
Mediterranean, pages 103–110.
Popov, S., Kurochkin, M., Kurochkin, L., and Glazunov, V.
(2014). Hardware and software equipment for mod-
eling of telematics components in intelligent trans-
portation systems. Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial Intel-
ligence and Lecture Notes in Bioinformatics), 8638
LNCS:598–608. cited By 0.
Remy, G., Senouci, S. M., Jan, F., and Gourhant, Y. (2011).
Lte4v2x: Lte for a centralized vanet organization.
In Global Telecommunications Conference (GLOBE-
COM 2011), 2011 IEEE, pages 1–6.
Zaborovski, V. S., Chuvatov, M., Gusikhin, O. Y., Makkiya,
A., and Hatton, D. (2013). Heterogeneous multipro-
tocol vehicle controls systems in cloud computing en-
vironment. In Ferrier, J.-L., Gusikhin, O. Y., Madani,
K., and Sasiadek, J. Z., editors, ICINCO (1), pages
555–561. SciTePress.
Zaborovskiy, V., Lukashin, A., Popov, S., and Vostrov, A.
(2013). Adage mobile services for its infrastructure.
In ITS Telecommunications (ITST), 2013 13th Inter-
national Conference on, pages 127–132.
Zaborovsky, V., Lukashin, A., Kupreenko, S., and Mulukha,
V. (2011). Dynamic access control in cloud services.
Conference Proceedings - IEEE International Confer-
ence on Systems, Man and Cybernetics, pages 1400–
1404. cited By (since 1996)4.
VEHITS2015-InternationalConferenceonVehicleTechnologyandIntelligentTransportSystems
166
