
Towards Enhancing Communication Between Caregiver Teams and
Elderly Patients in Emergency Situations
Syed Atif Mehdi
1
, Artem Avtandilov
1,2
, Shah Rukh Humayoun
2
and Karsten Berns
1
1
Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, Germany
2
Computer Graphics and HCI Group, University of Kaiserslautern, Kaiserslautern, Germany
Keywords:
Healthcare Robotics, Interacting Robots at Home, Graphical User Interfaces, Web-based Interaction, Mobile
Platform, Evaluation Study.
Abstract:
The paper presents a framework developed for facilitating care giver staff to interact with an elderly person
in an emergency situation alone at home. The framework uses an autonomous mobile robot (ARTOS) as a
communication medium in the home environment to establish a communication channel. The novel idea in
this work is to facilitate emergency responding teams by also providing them access and control over the robot
through mobile devices. The user evaluation study of the developed framework demonstrates the effective
usability of the system even by users having no prior experience or training.
1 INTRODUCTION
The elderly population in developed countries is
steadily increasing (Lehr, 2007). In many situations
these people live alone in their homes and this re-
quires urgent assistance in case of some emergency
situation happens to the person. Currently, many re-
search groups are devoting their efforts in develop-
ing robots that can perform several tasks in a typical
home environment. They focus normally on perform-
ing some activity in the home environment like fetch-
ing objects (Graf et al., 2009), folding laundry (Cio-
carlie et al., 2010), etc. In some cases, a robotic plat-
form has also been used as a communication medium
between the elderly person and a family member or
a caregiver staff (Merten et al., 2012; Rumeau et al.,
2012). These robots can be more beneficial if they
can provide support to the health care staff when an
emergency happens to an elderly person. One such
support would be to initiate the call to the health care
staff informing about the situation, other possibilities
would be to allow the robot to be remotely controlled
without the need of any sophisticated hardware (Dee-
gan et al., 2008; Mehdi et al., 2014).
The main contribution of our current work is de-
velopment of a framework for establishing communi-
cation between the elderly person and the emergency
responding teams via a mobile robotic platform and
performing evaluation studies describing the effec-
tiveness of the developed approach. It is an exten-
sion to previously developed interfaces (Mehdi et al.,
2014) where only staff at health care center was able
to communicate with the elderly person using the mo-
bile robot as a platform.
In order to illustrate the concept and developed
framework, this paper has been organized as fol-
lows. Section 2 presents an overview of communi-
cation mediums used during an emergency scenario.
The framework developed for establishing commu-
nication between the caregivers and the emergency
teams is described in Section 3. This section also
describes the communicating partners in detail. Sec-
tion 4 describes the communication between the part-
ners. Section 5 provides details of the conducted eval-
uation studies as well as discusses the results. Finally,
Section 6 provides the conclusion and gives directions
to the future work.
2 RELATED WORK
Crucial parts of the emergency response environments
are interaction between different entities in the envi-
ronment and the channels available for this interac-
tion. Many emergency services around the world have
upgraded their hardware and software to meet the de-
mand; however, vast majority of them still rely on the
voice communication solutions as a primary source
of information when most up-to-date information is
118
Atif Mehdi S., Avtandilov A., Rukh Humayoun S. and Berns K..
Towards Enhancing Communication Between Caregiver Teams and Elderly Patients in Emergency Situations.
DOI: 10.5220/0005492401180126
In Proceedings of the 1st International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AgeingWell-
2015), pages 118-126
ISBN: 978-989-758-102-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

required. Many previous works (Reddy et al., 2009;
Paul et al., 2008; Kyng et al., 2006) have been tack-
ling the issues in systematic approach to these frame-
works.
Reddy et al. raised questions about the crisis man-
agement and how technologies could affect the emer-
gency services (Reddy et al., 2009). They concluded
that the teams of first responders and the service cen-
ter have strong socio-technical aspect in interaction
as well as pointing out that team-to-team and team-
to-emergency sight communication are difficult to or-
ganize. On the other hand, Paul et al. found the role
of technologies in the process as uncertain due to the
opinion provided by the physicians participated in the
study (Paul et al., 2008). While Kyng et al. took
a closer approach into how interactive such services
could be, by setting specific challenges to the existing
systems handling emergencies (Kyng et al., 2006). By
illustrating the important role of the live video feed
when handling an emergency, they provided sufficient
proof that such solutions may be beneficial.
All the above-mentioned work took widely the
theoretic approach to the problem; however, most of
the work providing the real communication and engi-
neering solutions are developed in the industry trying
to meet market needs. Most pervasive approach in
the industry developed by Motorola
1
provides a solu-
tion for the emergencies occurring in largely accessi-
ble public spaces, relies on the government’s access
to the CCTV recordings in real time, dedicated emer-
gency channels and possibly a large impact. It aims
at improving response times, enhancing safety for re-
sponders, and enabling better communication with
emergency service center. This approach is based
on a steady ground of communication technologies
finely tuned for the needs of first responders; how-
ever, it lacks the individuality while tackling bigger
problems. As much as it is effective in the afore-
mentioned type of emergencies, it lacks individual ap-
proach when only one patient is endangered and does
not provide interactive communication with the emer-
gency scene.
Other solutions in the market like Mobile So-
lutions
2
and PK
3
take another approach trying to
strengthen communication between different emer-
gency services such as firefighters, medical personnel
and law enforcement by providing extended database
support with immediate access to records tackling
mostly management problems. Mobility for the com-
mand center is showcased by PK. It could be installed
on-site and serves as an authentication center and is-
1
http://www.motorolasolutions.com
2
http://www.elliottmobilesolutions.com
3
http://www.pk.nl
sues tasks to all service members using hand-held de-
vices.
As these industry approaches target communica-
tion between the first responders and their command
centers, they lack of the channels that are difficult to
organize (Kyng et al., 2006), namely live video feed
from the place where emergency occurred when it is
in the comfort of patients home. These communi-
cation strategies consider facilitating interaction be-
tween the diseased person and the service center. Al-
though this is important but these do not provide any
framework for establishing communication between
the emergency responding team and the person in dis-
tress, which could be helpful in better informing both
the team and the person.
3 METHODOLOGY
The main emphasis in this paper is to develop a
framework for establishing communication channel
between the Emergency Responding Team (ERT) and
the elderly person in an emergency situation at the
home environment. Since it is not known in advance
which ERT will be able to reach the person at earli-
est; therefore, the emergency situation is reported to
the Health Service Center (HSC). The HSC is then
responsible to send the request to the ERTs and con-
tact information is provided to only that ERT which
accepts to undertake the responsibility. The respon-
sible ERT can then communicate with the person us-
ing the autonomous mobile robot as a platform and
navigate it in the home environment to understand the
situation. Figure 1 gives an overview of the complete
framework.
3.1 Autonomous Mobile Robot
The Autonomous Robot for Transport and Service
(ARTOS) (see Figure 2) has been developed at the
Robotics Research Lab, University of Kaiserslautern
in order to investigate challenges in providing to el-
derly people living alone in their homes. The robot
is capable of driving autonomously in the home en-
vironment and detects obstacles using its laser scan-
ner, ultrasonic sensors, and bumper sensor. It is
also capable of learning the daily routine of the per-
son and searching the person using the learned rou-
tine (Mehdi, 2014). The robot can also be tele-
operated by caregiver staff at health service center us-
ing a joystick in the Graphical User Interface (GUI) to
observe the home environment (Mehdi et al., 2014).
TowardsEnhancingCommunicationBetweenCaregiverTeamsandElderlyPatientsinEmergencySituations
119
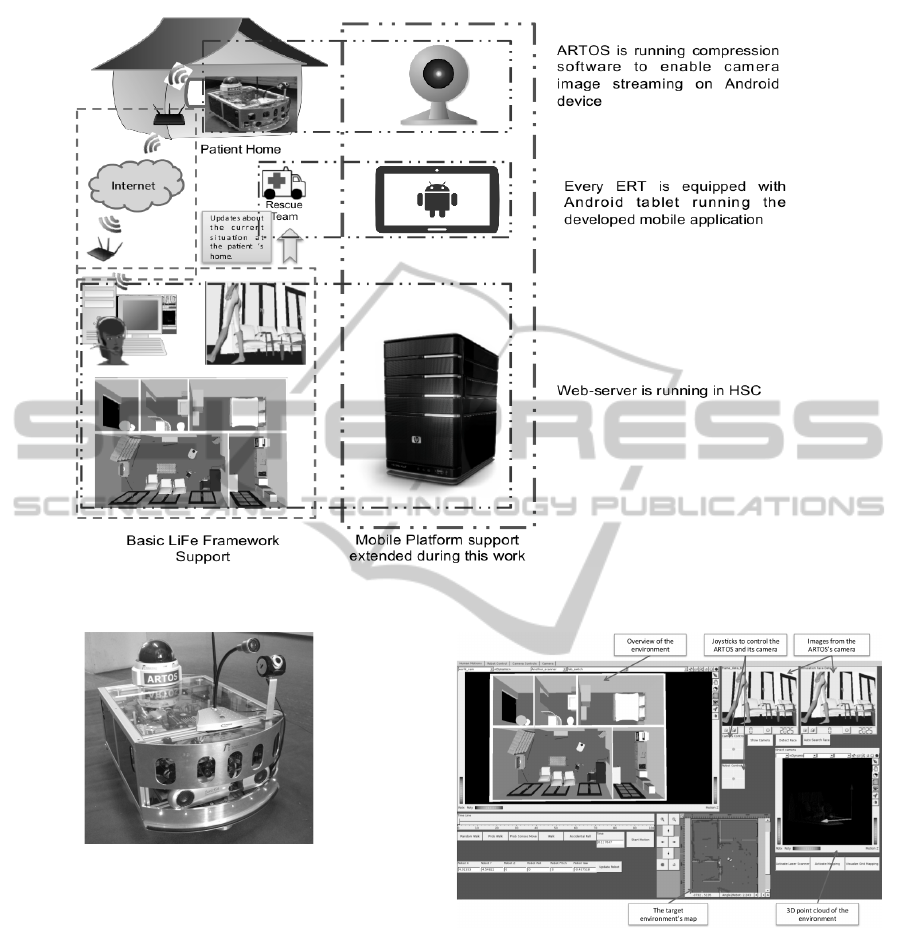
Figure 1: Overview of the developed framework.
Figure 2: Autonomous Robot for Transport and Service
(ARTOS).
3.2 Health Service Center
The Health Service Center (HSC) is the first point of
contact that receives the emergency help request from
ARTOS. After receiving the request, they can tele-
operate the robot to evaluate the situation in hand and
verify any false alarm. The GUI (see Figure 3) at the
center provides them with the view of the home using
camera on the robot. After verification they can trans-
fer the help request to the mobile teams to respond the
emergency situation.
Figure 3: The GUI at HSC that visualizes the elderly per-
son’s home environment and provides interactions to con-
trol ARTOS and the camera.
3.3 Emergency Response Teams
Emergency Response Teams (ERTs) respond to the
elderly person in an emergency situation. After re-
ceiving the information from HSC, they can use AR-
TOS as a communication medium to evaluate the sit-
uation at home and to talk with the person in distress.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
120
4 COMMUNICATION BETWEEN
ENTITIES
The emergency situation is notified by the ARTOS
to the staff at HSC on their Graphical User Inter-
faces (GUI). The notification contains the information
about the person and the possible emergency situa-
tion. The staff member at HSC can view the map of
the home environment and the obstacles in the envi-
ronment as detected by the sensors installed on the
robot using the GUI. The staff member can also re-
motely control the robot using the GUI to access the
situation and rectify in case a false alarm has been
generated.
In case a valid emergency situation is recognized,
the staff member at HSC can dispatch a message to
notify all the ERTs or the nearest ERT about the sit-
uation. This is performed using the developed web
server running at the HSC. The web server commu-
nicates with the Google Cloud Messaging (GCM)
Services for dispatching the notification. The staff
member can also monitor the location of each ERT
by tracking their GPS coordinates in the integrated
Google Maps. The web server at the HSC han-
dles communication, feedback, status updates and
database queries with the mobile application installed
on the ERT mobile devices. It has been developed as a
multi-user web-interface that can automatically prior-
itizes lists of ERTs and pending emergencies, which
allows HSC staff to act effectively and can decrease
time needed to respond to an emergency request.
An Android application has been specifically de-
veloped for the ERTs, to communicate with both HSC
and ARTOS to receive most up-to-date information
about the patient, their location, and the situation
that they are about to get involved. The function-
ality of the application includes receiving live video
image from ARTOS, joystick control of the robot to
explore the environment, status reports to the HSC,
database access for extended information about the
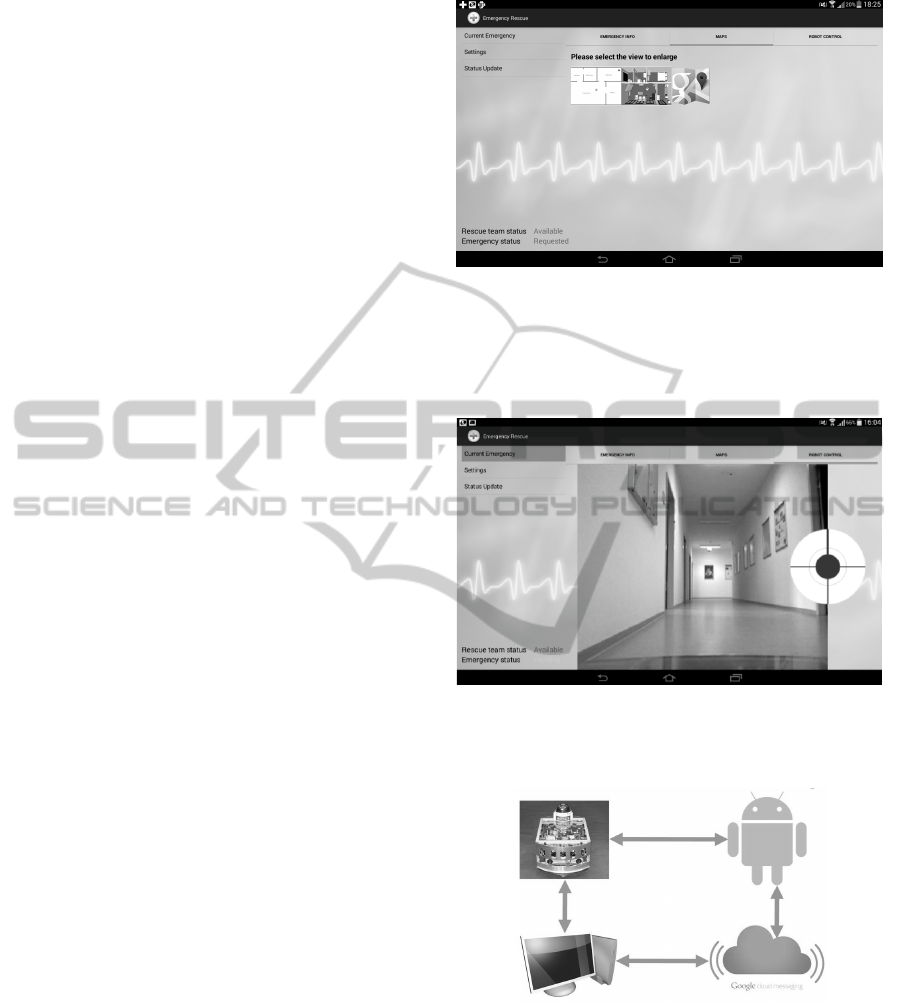
patient, and navigation options. Figure 4 and Figure 5
show screenshots of the developed mobile app for the
ERTs with the options of map selection and ARTOS
control. The mobile app receives and interprets the
messages received from the GCM. The message re-
ceived contains information about the patient, address
and Skype id of ARTOS. The GUI of the application
facilitates the ERT in determining the acceptance or
rejection of the job. In case of acceptance, it further
receives the information about the Skype id and IP
address of the ARTOS. Once the vital information is
received, ERT can directly communicate with the per-
son in distress and does not require HSC, which sig-
nificantly decreases the stressful job at HSC. Figure 6
Figure 4: A screenshot of the developed mobile app for the
ERTs that shows the availability of three maps, i.e., map
for ARTOS location in the home environment, the home
environment 3D map, and the Google map to the elderly
person home. Clicking on any of them shows in full screen
the selected map.
Figure 5: A screenshot of the developed mobile app for the
ERTs that shows the camera view of the ARTOS, while the
joy stick on the right side of the screen is used to control the
ARTOS movement.
Figure 6: Communication between the server at HSC and
ERT using Google Cloud Messaging. Once information is
received by the ERT, they can directly communicate with
ARTOS using the developed Android App.
depicts the communication between ARTOS, HSC
and ERTs.
TowardsEnhancingCommunicationBetweenCaregiverTeamsandElderlyPatientsinEmergencySituations
121

5 THE EVALUATION STUDIES
The main contribution of our framework is estab-
lishing a communication platform between the health
care staff at various levels (e.g., between the staff at
HSC and the mobile response teams) and the elderly
person at home. However, in our conducted evalu-
ation studies we mainly focused on the mobile plat-
form that we developed to be used by the mobile
ERTs.
We conducted the evaluation studies at two stages.
The first evaluation study was carried out with
three usability experts using the heuristic evalua-
tion (Nielsen and Molich, 1990; Nielsen, 1994) ap-
proach. This evaluation ran on the first implemented
prototype of the developed mobile app and the goal
was to find out the possible usability flaws in the
mobile app using the ten heuristics proposed by
Nielsen (Nielsen, 1994). Based on the results of
this evaluation study by experts, we redesigned our
mobile app user interface and made the suggested
changes.
The second evaluation study was conducted with
10 participants having different background using
the controlled task-based evaluation experiment ap-
proach. They were also given closed-ended and open-
ended questionnaires at the end of experiment in or-
der to know their feedback. These participants were
mostly researchers and students from the University
of Kaiserslautern, as the goal of the second evalua-
tion study was to analyze whether the developed mo-
bile app (which will be eventually used by ERTs) is
easy to use without any prior training or expertise.
In the following subsections, we provide details
of the conducted heuristic evaluation study followed
by the user evaluation study in the controlled environ-
ment.
5.1 The Heuristic Evaluation Study
The heuristic evaluation study was done with three us-
ability researchers from the Computer Graphics and
HCI group of the University of Kaiserslautern. They
evaluated the first implemented prototype of the mo-
bile app using the ten heuristics and ranked the user
interface giving a number from 0 to 4, where 0 means
no problem at all while 4 means usability catastro-
phe (Nielsen, 1994). The goal was to find out usabil-
ity issues in the early stage of the mobile app devel-
opment in order to improve the design and UI based
on this evaluation.
A list of tasks were given to these experts con-
sisted of the main features of the developed mobile
app: i.e., managing settings, performing status up-
dates, giving response to the emergency requests, es-
tablishing Skype call with the patient, sending feed-
back to the server, observing elderly person’s house-
hold map, route planning with Google Maps, and con-
trolling the ARTOS with joystick control option.
An introduction of the mobile app was given to
these experts before they started to evaluate it. Fur-
ther, the task description from the users’ point of view
was also given to them. They were also allowed to ask
details about any UI element or task during the evalu-
ation. In order to maintain the settings, the same per-
son was given the chance to explain the mobile app
and tasks during the evaluation. A form was given
to these experts in order to record their feedback re-
garding the ten heuristics and their overall comments
regarding any particular task or UI element.
Figure 7 shows the feedback of these three experts
using the ten heuristics, where the score indicates the
average of their given ranking in all tasks. The feed-
back indicated that some changes needed to be done
for preventing errors and extending the visibility of
the system status. However, there was not any major
usability problem or usability catastrophe. The worst
average grade of 2.0 from one expert was received
in the category of help and documentation criteria.
As our mobile app is intended to be used for pro-
fessional purposes by ERTs, help and documentation
must be sufficient for users with any level of compe-
tency and should provide in-depth review of the fea-
tures. Other major issues were in the cases of fifth and
ninth heuristics (average score of 1.25 and 1.08 by all
experts, see Figure 7), which indicated insignificant
lack of clarity on how to prevent and recover from er-
rors.
These experts also gave their suggestions for im-
proving the usability of the developed mobile app,
e.g., to introduce status fields of the rescue team and
the current emergency. These suggestions were then
analyzed and taken into account while developing the
final version of the app.
5.2 The User Evaluation Study
The goal of this conducted user evaluation study was
to analyze whether the developed mobile app is easy
to use without any prior training or expertise. There-
fore, we were interested in finding out the effective-
ness, efficiency, and user satisfaction aspects of our
developed app, as it will be used by ERTs for com-
municating with the HSC and the elderly person in
the emergency situation. The following metrics were
derived from the GQM model (Basili et al., 1994).
• Metrics for effectiveness: We measure and com-
pare the percentage of corrected completed tasks.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
122

!" !#$" %" %#$" &" &#$"
%'"()*)+),)-."/0"*.*-12"*-3-4*"
&'"53-67"+1-8119"*.*-12"39:";13,"8/;,:"
<'"=*1;"6/9-;/,"39:"0;11:/2"
>'"?/9*)*-196."39:"*-39:3;:*"
$'"@;;/;"A;1B19C/9"
D'"E16/F9)C/9";3-71;"-739";163,,"
G'"H,1I)+),)-."39:"1J6)196."/0"4*1"
K'"L1*-71C6"39:"2)9)23,)*C6":1*)F9"
M'"N1,A"4*1;*";16/B1;"0;/2"1;;/;*"
%!'"N1,A"39:":/64219-3C/9"
@IA1;-"%" @IA1;-"&" @IA1;-"<"
Figure 7: Average score of the mobile app UI using the ten heuristics.
• Metrics for efficiency: We measure and compare
the time needed for completing each task.
• Metrics for user satisfaction: We collect partici-
pants’ feedbacks and compare them.
We combined these metrics as suggested by the
Technology Acceptance Model (Venkatesh et al.,
2003). For collecting the participants’ feedbacks on
how to improve the developed mobile app, we chose
an open-ended questionnaire form in order to collect
their comments. We formulated the set of hypotheses
as:
• H1: We expect an effectiveness of more than
90%, which means that in total participants accu-
racy of the completed task would be at least 90%.
• H2: On average, both groups (i.e., the little or
inexperienced group and the experienced group)
achieve nearly the equal efficiency in completing
the given tasks.
• H3: Participants agree that the developed mobile
app is acceptable and useful for collaborating with
HSC and ARTOS robot for handling the emer-
gency request and for performing the rescue op-
eration.
5.2.1 Study Design and Experiment Settings
Based on the identified goals and hypotheses, we de-
signed this study as a controlled experiment under
laboratory conditions with a maximum time frame of
45 minutes per participant. This allowed us enough
time to have basic introduction explaining what is the
idea behind the developed mobile app and what kind
of environment participants will be interacting with.
We ran the study with 10 participants (6 males, 4
females), who were researchers and students from the
University of Kaiserslautern having different back-
grounds. Only one of them had prior experience in
dealing with emergency situations. However, four of
the participants had very little or no experience at all
in using smartphones or smart tablets, while remain-
ing six participants were experienced users of smart-
phones. Further, four of the participants never had any
experience of robotics while five of them had some
basic experience of robotics. The remaining one par-
ticipant was an expert in robotics. The age range of
participants in this study was from 20 to 44 years with
a median of 27.8 years old.
The participants were given four tasks to com-
plete one by one. Completion of the tasks was timed
and participants had a chance to ask questions dur-
ing the experiment in case they run into some tech-
nical difficulties or unable to complete the task by
themselves. An evaluator was there to carefully write
down the comments participants had upon comple-
tion of each task in order to make sure that immedi-
ate feedback is possible. After tasks were completed,
participants were presented with two questionnaires
forms: closed-ended questionnaires form and open-
ended questionnaires form. The closed-ended ques-
tionnaires form was based on nine questions, where
each question offered a selection from six options on
a Likert scale (Likert, 1932) (scale of 1 to 5 to show
how much participants agree with the given statement
and an additional option “Don’t know”). The open-
TowardsEnhancingCommunicationBetweenCaregiverTeamsandElderlyPatientsinEmergencySituations
123

ended questionnaires form was aimed at general feed-
back in which the participants were asked to list any
pros and cons they have identified in the developed
mobile app and an opportunity to voice any other
comments or suggestions.
The test was performed in the environment of the
laboratory, with the participants seated in an office
chair with no table and the tablet was freely in their
hands. Participants were interacting with the mobile
app using the standard touch features with no prior ac-
cess to the platform in order to ensure no prior training
or familiarity with the features.
5.2.2 Tasks Description
The test consisted of the following four tasks:
• Task 1: After an emergency request is issued:
find the basic information about the patient, plan
the route to the patient home on the Google map,
and accept the emergency request.
• Task 2: After an emergency request is issued: ini-
tiate a Skype call and then decline the emergency
request.
• Task 3: After accepting an emergency request:
open additional options for the emergency situa-
tion, explore the map of the elderly patient house-
hold, control the robot using the joystick, and nav-
igate it to the patient.
• Task 4: As a team leader of the new started shift:
enter your team details in the app settings and up-
date the availability status.
5.2.3 Results and Discussions
In this subsection, we briefly discuss the results of the
study. Overall, results of this conducted user evalua-
tion study indicate satisfactory results in both groups.
From the effectiveness perspective, all of the par-
ticipants were able to complete the tasks successfully
and accurately, which shows a high rate of effective-
ness and proves that the developed mobile app is easy
to operate. This also proves our hypothesis H1 in
which we were expecting that on average participants
would be able to accurately complete the tasks at least
90% of the total tasks.
The results from the efficiency perspective (i.e.,
the time completion) are listed in Figure 8, which
shows the average time completion per task for the
both groups (i.e., little or inexperienced users and ex-
perienced users). Participants from both groups do
not show any significant differences in time complet-
ing any of the tasks. This demonstrates that the de-
veloped mobile app is easy to use and does not re-
quire much experience in order to complete the task.
The main task (i.e., Task 3) that took most of the time
was navigating the robot using the joystick and this
is natural due to the speed of ARTOS. This brings
us to the importance of the closed-ended question-
naires (see Table 1) and open-ended feedback from
the participants. Even though most of the participants
agreed that “It was easy to handle the robot with the
joystick”, the average grade of 3.8 is the lowest com-
paring to other features used in the developed mo-
bile app. This was due to the security features of the
robot navigation system and participants’ unfamiliar-
ity with the environment. In the real life scenarios,
trouble of making yourself familiar with a new envi-
ronment could facilitate emergency response team’s
actions when they arrive to the endangered person’s
house and when time matters the most. Overall, the
results shown in Figure 8 prove our hypothesis H2, in
which we were expecting nearly the equal efficiency
from the participants with little or no experience com-
pared to the experienced participants.
0" 20" 40" 60" 80" 100" 120" 140" 160"
Task"1"
Task"2"
Task"3"
Task"4"
Li/le"or"no"experience" Experienced"
Figure 8: Average time completion in seconds of partici-
pants in both groups.
When we look at the participants’ feedback in
the closed-ended questionnaires (see Table 1), we ob-
serve an average score of more than 4 in most of the
cases, which shows high acceptance ratio of our mo-
bile app amongst the participants. However, in ques-
tion 3 (regarding the handling of robot through joy-
stick) and question 4 (recovering from mistakes) we
see a lower score. As described above, the first rea-
son was in difficulty of handling the ARTOS while in
the second case few of the participants were unfamil-
iar with the Android platform that allows users to go
back to the previous stage through the Back naviga-
tion button. Overall, the results of participants in the
closed-ended questionnaires also prove our hypothe-
sis H3, in which we were expecting a high acceptance
ratio from the participants.
Further, the feedback provided by the open-ended
questionnaires reveals the particular features of the
mobile app participants were or were not satisfied
with. The open-ended questionnaires were built
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
124

!! "! #! $! %! &'(! )*+,-./
!1:!It!was!easy!to!see!the!current!status!of!the!system!
0! 1! 1! 5! 3! 0! 4/
!2:!It!was!easy!to!change!Team!availability!status!
0! 1! 2! 0! 7! 0! 4.3/
!3:!It!was!easy!to!handle!the!robot!with!the!joysBck!
0! 2! 2! 4! 2! 0! 3.8/
!4:!It!was!easy!to!recover!from!mistakes!
0! 0! 3! 3! 2! 2! 3.9/
!5:!I!found!it!easy!to!locate!the!needed!features!in!the!layout!of!the!app!
1! 0! 1! 4! 4! 0! 4/
!6:!It!was!easy!to!complete!provided!tasks!
0! 1! 0! 3! 6! 0! 4.4/
!7:!It!was!clear!from!the!icons!the!intended!features!they!represent!
0! 0! 1! 2! 7! 0! 4.6/
!8:!I!found!the!interface!easy!to!use!
0! 0! 1! 6! 3! 0! 4.2/
!9:!I!would!recommend!to!use!this!system!for!emergency!scenarios!regularly!
0! 0! 0! 4! 4! 2! 4.5/
Table 1: Participants’ feedback in closed-ended questionnaires form. Here, 1 means “strongly disagree” and 5 means “strongly
agree”. The last column shows average score of all participants.
around the idea that the participant will give some
basic feedback upon completion of every task and
the evaluator will write it down, and after the par-
ticipant completes all of the tasks he/she will be al-
lowed to list pros and cons of the mobile app as well
as giving any other general feedback. The collected
open-ended feedback showed participants’ appreci-
ation towards the clarity in the GUI’s visualization,
namely the icons that were always reflecting the fea-
ture underneath it. They were also sharing their pos-
itive experience on how the interface was clear and
reflecting the purpose of the mobile app. Among
the cons participants were listing lack of the source
for help when something was unclear and noting that
they were ready to operate the robot if it was mov-
ing around faster; therefore, saying that it was a little
slower than they expected. One of the other common
feedback responses was initial confusion with the log
in mechanism for the team. Participants expected to
be allowed to put their personal details in the mo-
bile app, while they actually only needed to pick their
identification (the badge number) to log in, which was
specifically implemented to reduce time it takes to log
in and avoid possible typos when entering the details.
6 CONCLUSIONS
This paper has demonstrated the use of a frame-
work that can facilitate communication channel be-
tween an elderly person in emergency situation at a
home environment, health service center and emer-
gency responding teams. The autonomous mobile
robot, AROTS, provides the channel for establishing
this communication. The possibility of remotely con-
trolling ARTOS to analyze the situation by moving
the robot to different rooms and observe the images
sent by the robot, enriches the user experience.
In the future, we plan to perform detailed evalua-
tion studies in real environment settings to check the
feasibility and effectiveness of the complete frame-
work. Further, we also intend to develop a communi-
cation channel between different emergency respond-
ing teams in order to provide a better collaboration
between these teams to tackle the emergency situation
more effectively.
REFERENCES
Basili, V. R., Caldiera, G., and Rombach, H. D. (1994). The
goal question metric approach. In Encyclopedia of
Software Engineering. Wiley.
Ciocarlie, M., Hsiao, K., and Jones, E. (2010). Towards
reliable grasping and manipulation in household envi-
ronments. In 12th International Symposium on Exper-
imental Robotics, ISER.
Deegan, P., Grupen, R., Hanson, A., Horrell, E., Ou,
S., Riseman, E., Sen, S., Thibodeau, B., Williams,
A., and Xie, D. (2008). Mobile manipulators for
assisted living in residential settings. Autonomous
Robots, Special Issue on Socially Assistive Robotics,
24(2):179–192.
Graf, B., Reiser, U., Hagele, M., Mauz, K., and Klein, P.
(2009). Robotic home assistant Care-O-bot 3 - prod-
uct vision and innovation platform. In IEEE Workshop
on Advanced Robotics and its Social Impacts, pages
139–144, Tokyo. IEEE.
TowardsEnhancingCommunicationBetweenCaregiverTeamsandElderlyPatientsinEmergencySituations
125

Kyng, M., Nielsen, E. T., and Kristensen, M. (2006). Chal-
lenges in designing interactive systems for emergency
response. In Proceedings of the 6th Conference on De-
signing Interactive Systems, DIS ’06, pages 301–310,
New York, NY, USA. ACM.
Lehr, U. (2007). Population Ageing. In Online Handbook
Demography. Berlin Institute for Population and De-
velopment.
Likert, R. (1932). A technique for the measurement of atti-
tudes. Archives of Psychology, 22(140):1–55.
Mehdi, S. A. (2014). Using the Human Daily Routine for
Optimizing Search Processes using a Service Robot in
Elderly Care Applications. PhD thesis, Robotics Re-
search Lab, Department of Computer Science, Uni-
versity of Kaiserslautern.
Mehdi, S. A., Humayoun, S. R., and Berns, K. (2014). Life-
support: An environment to get live feedback dur-
ing emergency scenarios. In Proceedings of the 8th
Nordic Conference on Human-Computer Interaction:
Fun, Fast, Foundational, pages 935–938, Helsinki,
Finland.
Merten, M., Bley, A., Schr
¨
oter, C., and Gross, H.-M.
(2012). A mobile robot platform for socially assistive
home-care applications. In 7th German Conference
on Robotics, ROBOTIK ’12, pages 233–238, Munich,
Germany.
Nielsen, J. (1994). Enhancing the explanatory power of
usability heuristics. In Conference on Human Fac-
tors in Computing Systems, CHI 1994, Boston, Mas-
sachusetts, USA, April 24-28, 1994, Proceedings,
pages 152–158.
Nielsen, J. and Molich, R. (1990). Heuristic evaluation
of user interfaces. In Conference on Human Factors
in Computing Systems, CHI 1990, Seattle, WA, USA,
April 1-5, 1990, Proceedings, pages 249–256.
Paul, S. A., Reddy, M., Abraham, J., and DeFlitch, C.
(2008). The usefulness of information and commu-
nication technologies in crisis response. AMIA Annu
Symp Proc, 2008:561–565. amia-0561-s2008[PII].
Reddy, M. C., Paul, S. A., Abraham, J., McNeese, M., De-
Flitch, C., and Yen, J. (2009). Challenges to effective
crisis management: Using information and commu-
nication technologies to coordinate emergency medi-
cal services and emergency department teams. Inter-
national Journal of Medical Informatics, 78(4):259–
269.
Rumeau, P., Vigouroux, N., Boudet, B., Lepicard, G.,
Fazekas, G., Nourhachemi, F., and Savoldelli, M.
(2012). Home deployment of a doubt removal tele-
care service for cognitively impaired elderly people:
A field deployment. In 3rd IEEE International Con-
ference on Cognitive Infocommunications (CogInfo-
Com).
Venkatesh, V., Morris, M. G., Davis, G. B., and Davis, F. D.
(2003). User acceptance of information technology:
Toward a unified view. MIS Q., 27(3):425–478.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
126
