
A Probabilistic Approach to Parking
Benefits of Routing Instead of Spotting
Gabor Feher, Balazs Andras Lajtha and Akos Lovasz
Dept. of Telecommunication and Media Informatics,
Budapest University of Technology and Economics, Budapest, Hungary
Keywords:
Smart City, Parking, Parking Route, Parking Probability.
Abstract:
Urban parking is an important issue in all modern countries. Technological advances, with in-car sensors
and always connected smartphones have already paved the way to an ICT solution for this problem. However,
every attempt - including that of such a big companies, as Google - has failed to provide a suitable solution. So
far, the appeared solutions were centered around the notion of free parking spots. This approach does not take
into account the dynamics of the traffic and the drivers outside of the system. Here we propose a fundamentally
different approach based on parking probabilities and parking routes. Our solution can truly reduce the time,
resource and environmental damage wasted on parking place hunting, while keeping the operational costs low
and the users satisfied.
1 INTRODUCTION
In cities of the developed countries vehicle owner-
ship per household is close to and may reach 1, and
decreases only slowly (Goodwin, 2012). In the big
cities, the cars cause urbanization problems, most sig-
nificantly traffic jams and parking. Diseases con-
nected to air pollution and the stress caused by the
transportation have severe impact on all other area
of human life. While shifting to the environment
friendly, green transportation, traffic jams and related
issues seem to persist or even worsen due to speed
limits and reduction of road surface in favor of other
uses like urban vegetation or bicycle lanes. However,
the advances of the Information and Communication
Technology (ICT) in smart cities can create a cure for
the biggest problems.
One of the big problems of individual transporta-
tion is the problem of parking in frequented areas. In
those places, a great share of the traffic is caused by
drivers seeking a parking spot. A survey from 2005
(Arnott et al., 2005) claims that in big cities of the
U.S., in every moment 30 percent of the drivers are
looking for parking spots. Each single car spends 7.8
minutes to find a parking place in average. According
to a more recent survey (Dohler et al., 2011) the aver-
age parking time is 15 minutes in cities over 1 million
population in Europe. The average parking time is
13 minutes in Madrid, 15 minutes in Barcelona and
26 minutes in Granada. This also means that these
cars searching for parking place, produce 2300 tons
of CO2 per day.
2 RELATED WORKS
In the topic of parking in smart cities, there are al-
ready numerous research papers and application pub-
lished. We had a focus on Parking Guidance and
Information (PGI) systems. These systems aim to
solve the parking problem by providing information
to users about the amount of available parking places.
PGI systems are used for both parking lots and on-
street parking, while there are some significant differ-
ences, the same basic concepts apply.
Every PGI system handles information in the form
of available parking spots. The information about
parking spots can be aggregated assigning a positive
integer to a parking lot or a street segment, or it can
be a flag associated to each individual parking spot,
indicating it’s current state. Parking spots are well
defined in parking lots and in some cities where in-
dividual parking meters or sensors are deployed for
each spot. However in many European cities park-
ing spots are organic, only the parking style (parallel,
perpendicular or angled) is regulated.
95
Feher G., Andras Lajtha B. and Lovasz A..
A Probabilistic Approach to Parking - Benefits of Routing Instead of Spotting.
DOI: 10.5220/0005495400950100
In Proceedings of the 4th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS-2015), pages 95-100
ISBN: 978-989-758-105-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2.1 Information Collection
There are two ways to collect information about park-
ing spot availability. Either through infrastructure, or
through crowd sourcing.
Existing infrastructure can be used such as park-
ing meters (Caliskan et al., 2007) (Nawaz et al., 2013)
However using parking meters does not provide accu-
rate results, as in the case of the prepaid meters, usu-
ally the meters are overpaid and indicate occupancy
even when the car has left. On the other hand a mo-
bile phone based parking payment system can signal
the start and the end of the parking really accurately,
but lacks information about the position of the park-
ing car. Furthermore local residents may be entitled
to free parking, hence their parking events are not reg-
istered by any parking meters.
More accurate are the dedicated devices, like sen-
sors built into the road (Kessler, 2011), (Dohler et al.,
2011), or ultrasonic sensors in parking lots. These
devices provide exact measurements at a high instal-
lation and maintenance cost, an investment that local
authorities often choose not to make.
The other approach is to leverage user’s resources
and crowdsource the task of free spot detection.
Crowdsourcing can either rely on user input, or smart-
phone sensors (Chen et al., 2013). When drivers and
pedestrians are tasked to report parking spots, user
motivation becomes an important aspect. Compensat-
ing users for their input may lead to falsely reported
spots. On the other hand not providing external in-
centives results in freeriding that will reduce the per-
formance of the system. (Lan and Wang, 2013)
Cameras and radars can detect parking spots pass-
ing by them, but require special mounts or external
equipment. They also have a high error rate. Activity
sensors are more accurate, but can only detect parking
actions performed by the participating users (Lan and
Shih, 2014). Many solutions are based on different
types of sensors from gyroscopes through GPS posi-
tioning to WiFi signal strength analysis (Nawaz et al.,
2013), but all suffer from the same problem: when
application penetration is low, data about free parking
spaces will be sparse, and usability will be limited.
2.2 Information Processing
Information about an individual parking spot’s avail-
ability has a short expiration date. In frequented areas
parking spots do not last a minute, systems can only
work if future openings are predicted. The only accu-
rate way of predicting the opening of a parking spot
so far is through tracking the driver (Lan and Shih,
2014). When parking spot information is aggregated,
predictions can be made with more certainty from his-
torical measurements.
2.3 Information Dissemination
Information can be displayed to the users publicly or
personally. Moreover, personalized information can
be free or for sale.
In traditional Parking Information Systems (PIS)
roadside boards display the number of free spaces in
the parking lot or area. These systems have been ex-
tended with mobile applications that deliver the same
information to every user.
Many research work have the conclusion that PIS
are not effective, moreover in areas where there is a
shortage in parking spots, they cause severe traffic
jams, when drivers try to get to the last places. This
realization focused research efforts on matching users
to parking spots, displaying the information of only a
single parking spot to each user. Wang, using simula-
tion (Wang and He, 2011) proves that the time needed
to park is shorter in the case of reserved parking than
it is with PGI systems.
Besides the great amount of research work there
are several smart phone applications aiming to solve
the parking problem. Most of these applications
failed and are already discontinued. Open Spot form
Google (Kincaid, 2010) is an often mentioned exam-
ple. While supported by Google, Open Spot ended
up closing because the users were not collaborative
enough and did not help others with signaling of the
free parking spots. The TakeMySpot application fol-
lowed the same path and suffered the same fate.
Despite the failures, newer and newer applica-
tions arise trying to establish themselves in the mar-
ket. Many have simpler functionality, just displaying
prices, zones, parking lots and not providing guidance
or real time information. Such applications are Best-
Parking or Parkopedia, covering many cities world-
wide.
3 THE ParkingRoutes SOLUTION
Investigating the recent works in the field shows that
the current solutions are all based on the concept of
acquiring information of open spots. This information
is than either displayed publicly, or delivered to the
most suitable or highest bidding user. These works
address many aspects of the problem, starting from
the sensing of free spots to handling freeriding and
predicting the effect of low application penetration.
Even the definition of a parking spot raises research
questions.
SMARTGREENS2015-4thInternationalConferenceonSmartCitiesandGreenICTSystems
96

But this approach has many drawbacks. The col-
lection of free and busy information about given park-
ing spot is difficult or costly. The most reliable sensor
based solutions requires large investments, while the
maintenance could be expensive as well.
In crowded areas in rush hour parking spots open
and get taken literally in seconds. A system signaling
free parking spots is useless: the driver cannot get to
the spot in time and ends up driving more than she
would have without the application.
In highly frequented areas, aggregated parking in-
formation will be misleading. The amount of avail-
able parking spots will oscillate between zero and
one, and the drivers would be discouraged, however
he could have had good chance to take a freshly
opened spot.
Instead of focusing on the quantity of discrete
parking spots, we base our solution on a probabilis-
tic nature of parking. We came up with an idea, to use
parking routes. This novel approach creates a work-
ing solution without the previously identified draw-
backs.
3.1 Parking Probabilities
Instead of focusing on the state of individual parking
spot, we introduce the notion of parking probability.
We assign parking probability to street segments: a
part of the street delimited by two intersections. Seg-
ments have directions, meaning that parking probabil-
ity might be different on the same street for cars trav-
eling in the opposite direction. Parking probability is
metric that indicates the probability of being able to
find a parking spot on that segment. This metric is
much closer to how we perceive parking availability,
than a list of free parking spots.
The benefit of using parking probability is that
while probability varies in time, it shows periodicity
as opposed to the availability of a single parking spot,
which is stochastic. Parking probability can be fore-
casted based on historical data supplemented by pas-
sive measurements. We will detail our proposed algo-
rithm for determining parking probability after intro-
ducing our implemented service.
3.2 Collecting Parking Probability
As every other solution, ours is also based on the sens-
ing of parking activity. While our implementation is
based on crowdsensing, it can utilize the data from
deployed sensory networks too.
3.3 Parking Route
We observed the way drivers search for parking
spaces and conducted personal interviews on the sub-
ject to find patterns. People choose different strate-
gies for different scenarios. When going home, the
walking distance is very important: they are willing
to trade a couple of minutes in the evening to have the
car nearby when running late in the morning. They
end up circling the block for half an hour. Should they
have known it in advance they would have chosen dif-
ferently, and still they perform the same search each
day. When going to a regular event (play sports, go
to work) people devise a parking plan. They scout ar-
eas that they expect to be less crowded, maybe further
from the target, but with higher chance of an avail-
able parking spot. When people go to a target in an
unknown area, they usually pass by their destination,
and start looking for a parking spot afterwards. But
instead of making tight loops as in the first scenario,
they tend to map the area, widening the search un-
til a suitable spot is found. Parking strategies involve
a utility function that trades time spent cruising for
a parking space for walking distance from the park-
ing spot to the destination and some knowledge about
parking availability.
While showing the parking probability might help
the user to make better navigating decisions, evaluat-
ing the utility function for different possible routes is
tricky, especially when users have to deal with proba-
bilities. Our solution not only provides the map of es-
timated parking probabilities, but also advises a route
for parking.
For each parking segment s, a walking cost c
s
is
calculated to the target. Than based on parking prob-
abilities q
s
, the location of the user and her target,
our system recommends a parking route. A park-
ing route is a continuous path p composed of park-
ing segments each with an indication for parking or
for travel. Travel is indicating a segment that the
user should pass in order to reach areas more suit-
able for parking. When driving through a segment
labeled for parking the user has to take advantage
of the first parking opportunity. Only segments in
B
walking
vicinity of the target can be marked for park-
ing: (c
s
< B
walking
.
p = (s
1
, s
2
, . . . , s
l(p)
) (1)
Each parking route guaranties that the probabil-
ity of finding a parking spot on the route is greater
than 1 − ε, and parking route’s total length is below
B
driving
.
AProbabilisticApproachtoParking-BenefitsofRoutingInsteadofSpotting
97

∑
s∈p
h
s
≤ B
driving
(2)
∏
s∈p
(1 − q
s
) ≤ ε (3)
It is important to note that the parking route is
not the shortest path to a good parking space or area.
While strange at first, it is common that a parking
route does not reach the user’s destination.
There might be no parking route for the given tar-
get and location, or there might be many. When mul-
tiple parking routes are present, they are ranked based
on the cost function w(p) provided by the user. For
the sake of simplicity, we used the linear combina-
tion of walking distance and driving distance, with the
user preference, a being the coefficient for walking.
w(p) =
l(p)
∑
i=1
q
s
i
i−1
∏
j=1
1 − q
s
j
c
s
i
+ a
i
∑
j=1
h
s
j
!
(4)
When searching for the best route, we are mini-
mizing this cost function.
min
p ∈ P
w(p) (5)
When searching for the best parking route, we as-
sume that we know the actual parking probability for
every street segment of the target area.
The search for suitable routes consists of two
phases. In the first phase maximal routes are enu-
merated. A maximal route is a route that’s length is
B
driving
and the parking probability along the route is
more than 1 − ε. A maximal route can contain the
same segments several times. To find all maximal
routes, we use a breadth first search.
When a route is found a second search is per-
formed to find the segments marked for parking and
for travel. Each combination is considered and the
parking probability is evaluated. If the parking prob-
ability for the combination is above 1 − ε, the cost
function is evaluated.
It is easy to see that even the number of possi-
ble routes increases exponentially with B
driving
, with
an exponent between two and three depending on the
topology of the given area, and the parking / travel
segment determination has is exponential in length
too.
As many path had similar cost, it is not crucial
to find the optimal solution. For the second prob-
lem: finding the parking and traveling segments of a
given route a greedy algorithm produced good results.
Adding the segments in order of their evaluated cost
until the desired overall probability is reached proved
to a good approximation.
To reduce the number of routes to evaluate saving
memory and runtime, we implemented a naive heuris-
tic to restrict the search field. We assigned weights to
each segment, depending on their distance to the des-
tination and parking probability. The longer the route
was the less likely the algorithm chose a segment with
small weight. This reduced the exponent, keeping the
problem space smaller.
3.4 Estimating Parking Probability
The practical interpretation of parking probability is
the ratio of successful parking attempts on a segment,
divided by the number of vehicles traveling through
that segment with the intent of finding a parking spot.
Hence to determine the parking probability on a given
segment at a given time, these two numbers have to be
measured or estimated.
When we propose a parking route to a driver, it
is expected that she follows the route and attempts to
park on the suggested segments. So a driver follow-
ing the parking route can be considered a driver look-
ing for a parking spot. If the driver parks on a seg-
ment, she will increase the number successful parking
events. Hence we can measure parking probability by
observing our users. Higher the application’s penetra-
tion, the higher the accuracy of this measurement.
The paradox of this approach is that not the open-
ing but the taking of a parking spot will increase park-
ing probability on the segment.
It is also important to consider the temporal prop-
erties of parking probability. In different zones - res-
idential, industrial, commercial - we observed differ-
ent fluctuations of the probability, ranging from mul-
tiple vacant spots to full load with several cars cir-
cling for parking. On the other hand parking proba-
bility seems to be a periodic function, with daily and
weekly cycles. Hence it is often better to estimate
parking probability based on historical measurements
than on recent ones. To handle this phenomenon we
divided time to 15 minute long segments. We register
measurements for these segments.
As the periodic nature for each segment may be
different, the weight in the prediction of the recent
measurement and the daily, weekly, monthly and
yearly periods should be determined by examining the
correlation between measured values. Also as current
measurements accumulate, the effect of past measure-
ments should be decreased.
3.5 Implementation
Our implementation consists of a database containing
the parking probabilities, an event database, a predic-
SMARTGREENS2015-4thInternationalConferenceonSmartCitiesandGreenICTSystems
98
Smartphone ParkingRoute service
Display
Parking
sensor
module
Route
planner
Event
database
Probability
database
Prediction
engine
Sensed
events
Street section
probabilities
Historical data
Figure 1: ParkingRoutes architecture.
tion service and a mobile client. Their connections
are shown on Figure 1.
In order to get the required topology of the cities,
we process the Open Street Map topology, and derive
an oriented graph consisting of segments.
The mobile client is responsible for capturing
parking events. Parking data is collected in the event
database, and periodically processed by the prediction
service to update the probability database. When the
user wants to park, the mobile client queries the prob-
ability database for actual information. Than the route
search is done on the mobile device, and the result is
presented to the user.
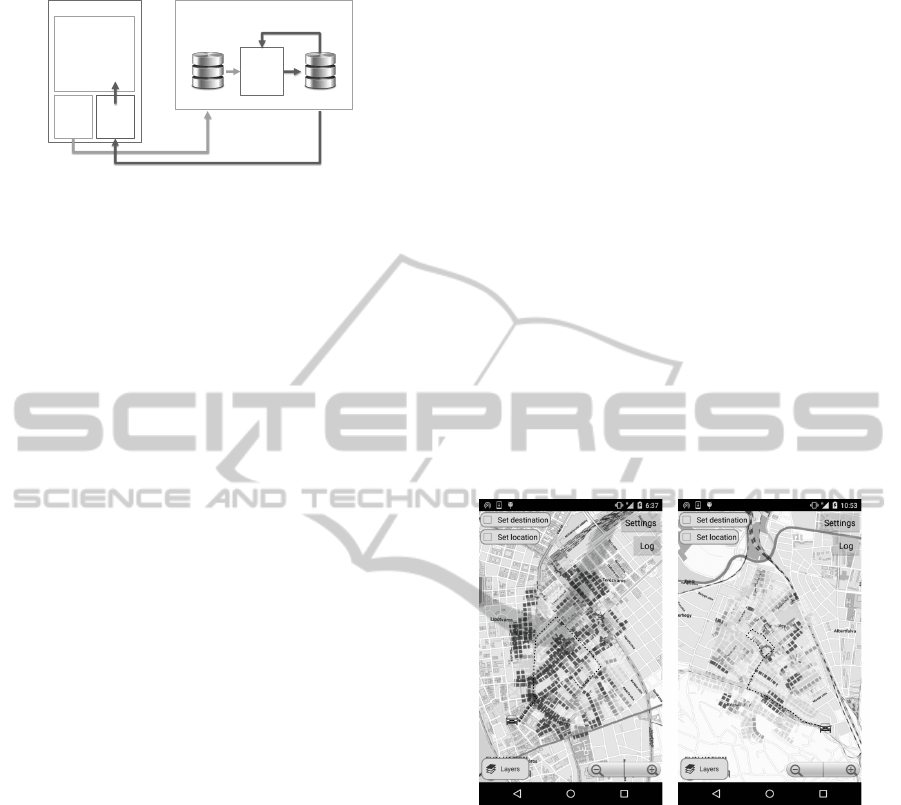
Screenshots with navigations can be seen on Fig-
ure 2. The red car icon shows the actual position of
the car, the orange target icon is the desired parking
location and the dashed line is the parking route. The
dashed line can have different sections with differ-
ent colors. The dark blue section is a shortest route
navigation to the parking zone. We do not plan any
parking on this route. At the end of this section, the
car enters to the area where the smartphone made the
parking route from the entry point to the destination.
It is also possible, that parking is not recommended on
some sections of the parking route, as there are better
sections for the stop. These street sections are colored
to light blue.
Besides displaying the parking route, the parking
probabilities for the street sections around the desired
parking location are also displayed. The color key:
green, yellow, orange and red shows the parking prob-
ability for the given section. Street sections in green
color have high parking probabilities, while the red
color means hardly any chance for parking. This gives
the user the ability to evaluate the suggested route and
in turn increase trust in the system.
The parking events, when the car is stopped at a
place or when the car leaves the parking spot is sig-
naled to the ParkingRoutes server together with the
GPS position of the spot. On the server side the park-
ing probabilities are adjusted based on these events.
3.6 Feasibility Studies
Since all the parking route computations are running
on the smartphone, we investigated the resource de-
mand of the routing algorithms, whether it is suitable
for smartphones or not.
We made test in two different scenarios. The
downtown scenario is a scenario where the streets are
full of parking cars, and the parking probability is
very low. In contrast, the other tested scenario is the
suburb scenario, which has plenty of spaces on the
streets, so the parking probability is generally high.
In the two scenarios the radius of the parking
search area was set to 1000 meter, the parking route
calculation worked with those street sections that
were within this area. The maximum parking route
length was set to 1000 meter.
Figure 2 displays the two scenarios, and the se-
lected parking locations. The position of the car and
the position of the desired parking place were fixed
during the measurements.
Figure 2: The inner city and the suburb test scenarios.
We measured two metrics. The memory consump-
tion and the running time of the algorithm. For the
test we used a mid range Nexus 4 device with An-
droid 4.1 operating system. The memory consump-
tion was calculated by the algorithm itself. When the
parking route search algorithm initiated a new recur-
sive search from the given state, we allocated a mem-
ory block for that. The metric counted the maximum
number of these blocks, which existed at the same
time, and not the total number of allocations. With
the runtime metric we measured the total execution
time of the parking route planning algorithm, exclud-
ing the street section data downloading.
In order to be able to compare the results to other
values, we measured a shortest path algorithm as
well. This algorithm creates the shortest route from
the car position to the target. This is not a parking
AProbabilisticApproachtoParking-BenefitsofRoutingInsteadofSpotting
99
route.
As neither the car and target positions, nor the
street section probability database was changed dur-
ing the tests, therefore subsequent runs on the given
scenario produced always the same results.
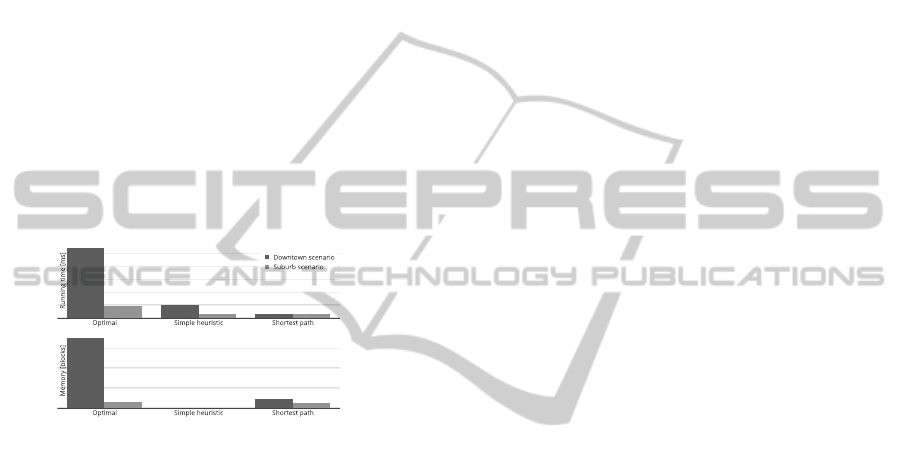
Figure 3 displays the measurement results for the
downtown and the suburb scenario. As it can be seen
the optimal solution is slow and resource demanding
compared to the other two algorithms. However, the
worst case 273 ms running time and the 70k allocated
memory blocks still makes this algorithm a feasible
choice for the users. The simple heuristic algorithm
created 62 memory blocks and ended within 50 ms
in the challenging downtown scenario. As it was
expected, the algorithms are faster and require less
memory allocations in the suburb area, as the park-
ing possibility is high enough on shorter routes. The
optimal algorithm runs for 46 ms, and allocates 5537
memory blocks, while the simple heuristic algorithm
takes 17 ms and 47 memory blocks.
Figure 3: Resource allocation at the downtown and suburb
scenario.
From the measurements we can see, that parking
route searching in a reasonable sized areas, with a rea-
sonable sized parking routes is feasible even with the
slowest and most resource hungry optimal algorithm.
The search is longer in areas where the parking possi-
bility is low. Using the simple heuristic approach, the
search is faster and requires less memory. For old de-
vices with limited CPU and memory capabilities, this
searching algorithm suits better than the optimal one.
4 CONCLUSION
The dawn of the smartphones brought new opportuni-
ties to solving the parking problem. Many proposed
applications failed in early stages, and til this day
there is no working solution for urban parking. The
parking spot based approach taken by others cannot
cope with low usage, as drivers outside of the sys-
tem render the sparse available information obsolete
by the time it is advertised.
We took a new approach that is not based on park-
ing spot availability, but rather on the probability of
parking on a given street segment. Parking probabil-
ity is fundamentally different from individual parking
spots, and as such we had to rethink and redesign ev-
ery step of the parking guidance, from the definition
of the information through data collection and data
processing to the way information is presented to the
user.
We answered all the design questions and imple-
mented a system that demonstrates the feasibility of
our idea. We run simulations to validate our solution.
The initial results look promising, however more thor-
ough traffic simulations are needed.
REFERENCES
Arnott, R., Rave, T., and Schb, R. (2005). Alleviating Urban
Traffic Congestion, volume 1 of MIT Press Books. The
MIT Press.
Caliskan, M., Barthels, A., Scheuermann, B., and Mauve,
M. (2007). Predicting parking lot occupancy in ve-
hicular ad hoc networks. In Vehicular Technology
Conference, 2007. VTC2007-Spring. IEEE 65th, page
277281.
Chen, X., Santos-Neto, E., and Ripeanu, M. (2013). Smart
parking by the COIN. In Proceedings of the Third
ACM International Symposium on Design and Anal-
ysis of Intelligent Vehicular Networks and Applica-
tions, DIVANet ’13, page 109114, New York, NY,
USA. ACM.
Dohler, M., Vilajosana, I., Vilajosana, X., and LLosa, J.
(2011). Smart cities: An action plan. In Proceedings
of Barcelona Smart Cities Congress.
Goodwin, P. (2012). Peak travel, peak car and the future of
mobility.
Kessler, S. (2011). How Smarter Parking Technology Will
Reduce Traffic Congestion.
Kincaid, J. (2010). Googles open spot makes parking a
breeze, assuming everyone turns into a good samar-
itan.
Lan, K.-C. and Shih, W.-Y. (2014). An intelligent driver lo-
cation system for smart parking. Expert Systems with
Applications, 41(5):2443–2456.
Lan, K. C. and Wang, H. Y. (2013). On providing incen-
tives to collect road traffic information. In Interna-
tional wireless communications & mobile computing
conference (IWCMC13).
Nawaz, S., Efstratiou, C., and Mascolo, C. (2013). Park-
Sense: a smartphone based sensing system for on-
street parking. In Proceedings of the 19th annual in-
ternational conference on Mobile computing & net-
working, page 7586.
Wang, H. and He, W. (2011). A reservation-based smart
parking system. In Computer Communications Work-
shops (INFOCOM WKSHPS), 2011 IEEE Conference
on, page 690695.
SMARTGREENS2015-4thInternationalConferenceonSmartCitiesandGreenICTSystems
100
