
Rotation-Invariant Image Description from Independent Component
Analysis for Classification Purposes
Rodrigo D. C. da Silva, George A. P. Thé and Fátima N. S. de Medeiros
Federal University of Ceara, Dept. of Teleinformatic Engineering, Campus do Pici s/n, Bl 725, Fortaleza, Brazil
Keywords: Independent Component Analysis, Invariant Rotation, Pattern Recognition.
Abstract: Independent component analysis (ICA) is a recent technique used in signal processing for feature
description in classification systems, as well as in signal separation, with applications ranging from
computer vision to economics. In this paper we propose a preprocessing step in order to make ICA
algorithm efficient for rotation invariant feature description of images. Tests were carried out on five
datasets and the extracted descriptors were used as inputs to the k-nearest neighbor (k-NN) classifier.
Results showed an increasing trend on the recognition rate, which approached 100%. Additionally, when
low-resolution images acquired from an industrial time-of-flight sensor are used, the recognition rate
increased up to 93.33%.
1 INTRODUCTION
The human ability to recognize objects regardless of
eventual rotation, translation or scalling
transformation is one of the most basic and
important features for human-environment
interaction (Cichy, 2013). This recognition ability
also provides human beings with the unique ability
of sensing and actuating in a wide range of
situations. In addition, it enables object labeling
wherever it is located and whatever it is oriented on
a scene.
In computer vision applications, a fundamental
issue is to recognize objects regardless of viewpoint
transformations. Particularly, in industrial
applications such as object counting and selection in
conveyor belts, pattern recognition is worldwide
used. In these applications, object recognition
implies label assignment according to its feature
description. By object description it is meant one
with as few data as possible, thus allowing for fast
and, eventually, all-embedded implementations.
Classical methods for 2-D object recognition
include B- Spline moment method (Huang and
Cohen, 1996), moment methods (Hu, 1962), (Zhao
and Chen, 1997), (Mukundan, 2001), Fourier and
Wavelet transform methods based on object contour
(Oirrak et al., 2002), (Khalil and Bayoumi, 2002)
(Huang et al., 2005).
In the last decade, ICA has been claimed to offer
powerful feature description from a reduced set of
descriptors. Essentially, it is a blind source
separation technique, which estimates components
that are as independent as possible (Hyvärinen et al.,
2001). Pioneering this field was the work on the
separation of two physiological signals (Jutten and
Herault, 1991), and it has been established as an
interesting tool for research. In fact, significant
advances have been achieved in terms of efficiency
of algorithms and range of applications where ICA
can be used, as well. Therefore, interest concerning
this technique has increased in electrical power field
(Lima et al., 2012), computer vision (Pan et al.,
2013), face recognition (Sanchetta et al., 2013),
neuroimaging (Khorshidi et al. 2014) (Tong et al.,
2013), neurocomputing (Park et al. 2014) (Rojas et
al. 2013), biomedical signal processing (Sindhumol
et al. 2013), computational statistics (Chattopadhyay
et al., 2013), economic modeling (Lin and Chiu,
2013), chemistry (Masoum et al. 2013), etc.
ICA solves the problem of suitably representing
multivariate data by linearly decomposing a random
vector x, into components, s, that are statistically
independent, according to Eq. (1) below. Main goal
is to estimate the independent components (ICs), or
the mixing matrix A only from the observed data x.
x
=
A
s
(1)
210
da Silva R., A. P. Thé G. and de Medeiros F..
Rotation-Invariant Image Description from Independent Component Analysis for Classification Purposes.
DOI: 10.5220/0005512802100216
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 210-216
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

In order to make ICA estimation possible, the
ICs must be non-gaussian; this non-gaussianity
assumption in ICA mixture modeling is probably the
main reason of the conducted researches on the field
(Hyvärinen and Oja, 2000). Another known
restriction in ICA is that it is not rotation invariant;
this means that rotation of the observers affects the
estimation of the mixing matrix and the ICs, as well.
Therefore, the ability of representing rotating objects
would be compromised, in principle.
In the literature, works discussing the issued of
rotation invariance generally refer to (Huang et al.,
2005) and (Ali et al., 2006), whose methods also
consider the translation and scaling transformations.
The former introduces a new scheme for affine
invariant description and affine motion estimation
contour-based depiction extracted by ICA. The latter
is an invariant description method based on a
normalized affine-distorted and noise-corrupted
object boundary.
As an alternative to face the second restriction, in
this paper we propose to use ordering preprocessing
step as a way to make ICA robust to rotation
transformation of the observers, so that getting
rotation-invariant image descriptors. This ordering
step is accomplished by making the input vector to
undergo a nonlinear transformation, here expressed
in terms of a matrix λ
.
Then, to evaluate the proposal, we performed a
simple k-Nearest Neighbor classifier (k-NN) on
various image database to show that more efficient
image descriptors can be obtained if this
preprocessing takes place.
This paper is organized as follows: Section 2
briefly describes fundamentals of ICA and the
proposed preprocessing step for ICA-based rotation
invariant image feature extraction. In section 3 the
datasets are described and discussed along with the
experimental results of a classification system.
Finally, in section 4 conclusions are drawn.
2 BASICS OF ICA
ICA is a mathematical technique that reveals hidden
factors that underlie a set of random variables, which
are assumed non-gaussian and mutually statistically
independent. It is also described as a statistical
signal processing technique whose goal is to linearly
decompose a random vector into components that
are not only uncorrelated, but also as independent as
possible (Fan et al., 2002). Thus, ICA can be
considered as a generalization of the principal
component analysis (PCA). PCA generates a
representation of data inputs based on uncorrelated
variables, whereas ICA provides a representation
based on statistically independent variables (Déniz
et al., 2003).
The basic definition of ICA is given in the
following. Given a set of observations of random
variables x
1
(t), x
2
(t). ...x
n
(t), where t is the time or
sample index, assume that they are generated as a
linear mixture of independent components s
1
(t), s
2
(t).
...s
n
(t) (Huang et al., 2005):
x= A (s
1
(t),s
2
(t),... ,s
n
(t ))
T
= As
(2)
where A is an unknown mixture matrix, A ϵ
R
n×n
(Huang et al., 2005). The ICA model, Eq. (1),
describes how the observed data are generated by a
process of mixing the independent components s.
ICs are latent variables, what means that they cannot
be directly observed. Thus, the classic ICA problem
consists in estimating A and s, when only x is
observed, provided that the observers, collecting the
mixtures and representing the rows of A, be
independent, so that A is invertible (Bizon et al.,
2013) (Huang et al., 2005).
After estimating the matrix A properly, the
problem stated by Eq. (1) can be rewritten as:
s=
A
− 1
x
= Wx
,
(3)
in such a way that a linear combination
s
= Wx
is
the optimal estimation of the independent source
signals s (Bizon et al., 2013).
Under the assumption of the statistical
independence of the components, and that they are
characterized by a non-gaussian distribution, the
basic ICA problem stated in Eqs. (1) and (2) can be
solved by maximizing the statistical independence of
the estimates s (Bizon et al., 2013).
On the process of finding the matrix W, some
useful preprocessing techniques are used in order to
facilitate the calculation (Fan et al., 2002). There are
two quite standard preprocessing steps in ICA. The
first one moves the data center to the origin by
subtracting the data mean as follows
~
x = x− E { x }
(4)
The second step consists in whitening data, i.e.,
by applying a data transform and providing
uncorrelated components of unit variance,
z= V
~
x
,
(5)
where V is the whitening matrix and z is the
whitened data.
Rotation-InvariantImageDescriptionfromIndependentComponentAnalysisforClassificationPurposes
211
ICA applications on pattern recognition of
rotated images require as training step the random
variables to be the training images. Letting x
i
to be a
vectorized image, we can construct a training image
set x
1
, x
2
,...,x
n
, with n random variables which are
assumed to be the linear combination of m unknown
independent components s, denoted by s
1
, s
2
,...,s
m
converted into vectors and denoted as x = (x
1
,
x
2
,...,x
n
)
T
and s = (s
1
, s
2
,...,s
n
)
T
. From this
relationship, each image x
i
is represented as a linear
combination of s
1
, s
2
,...,s
m
with weighting
coefficients a
i1
, a
i2
,...,a
im
, related to the matrix A.
When ICA is applied to extract image features, the
columns of A
train
are features, and the coefficients s
signal the presence and the amplitude of the i-th
feature in the observed data x
train
(Fan et al., 2002).
Futhermore, the mixing matrix A
train
can be
considered as features of all training images (Yuen
and Lai, 2002). Accordingly, x
test
must be multiplied
by the vector s for the characteristics A
test
as:
A
test
= x
test
s
− 1
(6)
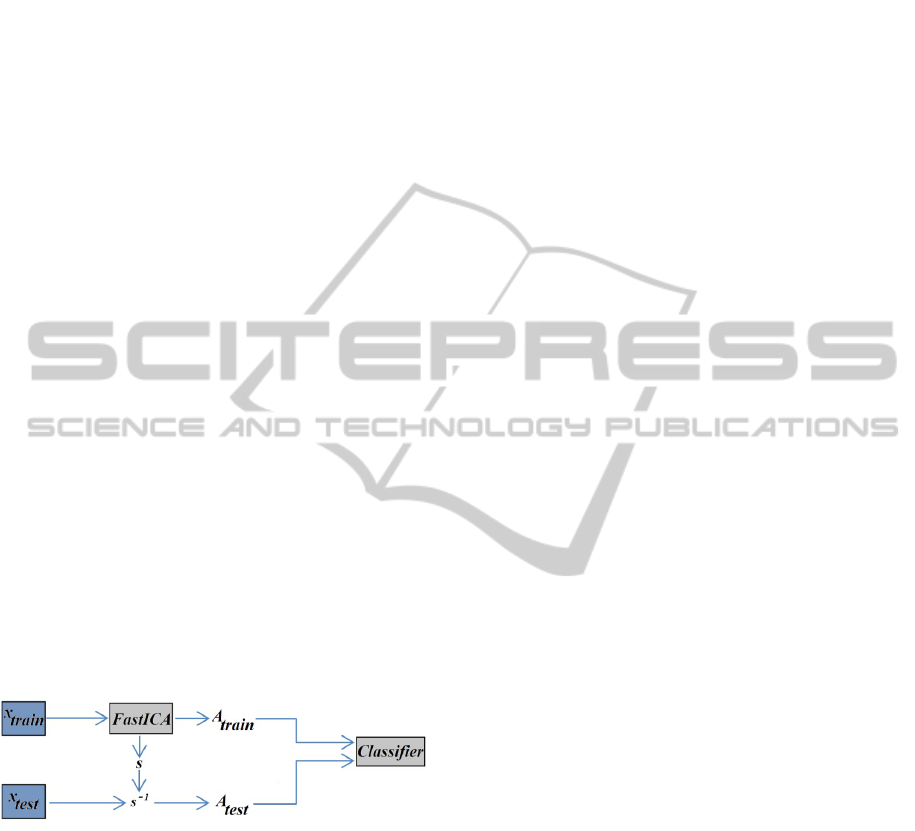
Finally, this matrix contains the main feature
vectors of the image under test, which is the input to
the classifier, as Figure 1 illustrates.
There are several algorithms that perform ICA
and they are named FastICA (Hyvärinen et al.,
2001), Jade (Cardoso, 1989), ProDenICA (Hastie
and Tibshirani, 2003), orInfomax (Bell and
Sejnowski, 1995), KernelICA (Bach and Jordan,
2002). Here, we perform ICA by applying FastICA
because it is simple and allows program code
modification and maintenance.
Figure 1: Steps of the classification process.
2.2 Proposed Technique
The proposed technique consists in arranging the
vectorized images such that pixel intensities are
ordered (this does not modify the intensity
distribution and Probability Density Function of
image pixels under study). As our results reveal, it
improves the ICA estimation, thus providing better
representation of images that have undergone
rotations.
The ordering procedure is accomplished by
multiplying input vector x by a matrix, hereafter
referred as λ, which is unique for each sample image
and is responsible for ordering the vector.
Combining this procedure with Eq. (1), it can be
written as
λx= λAs= x
order
= Bs
order
(7)
Eq. (6) shows that the ICA model for the ordered
input vector remains valid.
The matrix here proposed is not a permutation
matrix used in basic linear algebra to permute rows
or columns of a matrix, but it is actually n x n matrix
able to reorder the elements of n-size vector, and
assumes the following form:
1
2
0
0
0
k
k
nk
nxn
λ =r
r
r
.
(8)
There is only one non-zero column, whose
elements can be obtained from the following
pseudo-code:
x = INPUT;//waits for the input image vector
maxValue=MAX(x);//finds the maximum of input vector, x
maxIndex=FIND(maxValue,x);// returns index
λ = ZEROS(SIZE(x),SIZE(x));//initialization as zero-matrix
count = 1;
maxCounter = SIZE(x);
REPEAT
minValue=MIN(x);//finds the minimum of input
vector, x
minIndex=FIND(minValue,minValue);//returns index
λ(count,maxIndex) = minValue/maxValue;//fills matrix
CLEAR x(minIndex);//eliminates minIndex-th element
UNTIL count = maxCounter
As results will reveal, the adoption of the
ordering preprocessing leads to improvement in
classification accuracy, which will be associated
later to the non-gaussianity of the data in the ICA
model.
2.3 Classification
Classification is the final stage of any image
processing system where each unknown pattern is
assigned to a category. The degree of difficulty in a
classification problem depends on the variability of
feature values that characterize objects belonging to
a same category with regard to differences between
feature values of objects belonging to different
categories (Mercimek et al., 2005). In this paper, we
use the k-Nearest Neighbor classifier (k-NN) for
supervised pattern recognition, a classical technique
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
212

proposed by (Cover, 1968) as a reference method to
evaluate the performance of more sophisticated
techniques (Coomans and Massart, 1981).
Our main purpose is to investigate the effect of
the ordering preprocessing on the ICA estimation.
Thus, the comparison among several classifiers is
out of the scope of this paper.
3 DATASETS
The performance evaluation of the ordering
procedure of a ICA-based classification system has
been done in a very straightforward manner. It
simply compares the classifier accuracy obtained
when the input vectors are ordered (to some extent)
to the case when they are not. This is done for
different image sets, described in the following.
Figure 2: Examples of 1024 x 1024 images from Dataset A.
3.1 Datasets A and B (Small Database)
The first dataset used in this experiment includes 12
images of 1024 × 1024 pixels and 7 images of 512 ×
512 pixels, acquired from the database of the Ming
Hsieh Department of Electrical Engineering of the
University of Southern California.
Each image was rotated 1° step from 0° to 360°,
thus forming 361 samples for every image. Those
corresponding to 0° were used for training and the
others used for testing. Figure 2 shows some image
samples of dataset A.
3.2 Dataset C (Low-resolution Images)
In order to evaluate the proposed method and extend
conclusions for industrial-like applications, thus
broadening the range of interested readers, we
performed tests on an additional dataset. In this
experiment, tests were carried out on images
extracted from the 3D sensor effector pmd E3D200,
from ifm electronic ®, which is a low-resolution
time-of-flight 50 × 64 pixels sensor.
Another purpose of this experiment is to prospect
real-time implementation of all-industrial image
classification systems using ICA-based description.
Dataset C contains pictures of three small packages,
just different in size, which were acquired after
randomly rotating the packages on a conveyor belt.
This was done in a bad illuminated scenario, as it
can be seen in the poor quality of images in Figure 3
below.
It is worth emphasizing that this experiment was
performed on three image classes. The number of
prototypes per class is 6, each one referred to a side
of every box, in such a way that the database
available for training contains 18 images.
Figure 3: 50 x 64 pixels pictures of three packages with
dimensions 15×10.5×7.2 cm, 15×14×6 cm and
21.5×16.2×9.6 cm, respectively.
3.3 Dataset D (Large-Size Database)
To further evaluate the performance of the proposed
method for large datasets, another experiment was
necessary, this time having 77 images. To create this
database, other 58 textures images acquired from the
database of the Ming Hsieh Department of Electrical
Engineering of the University of Southern California
were resized and added to datasets A and B.
Each image was rotated with 5° step, from 0° to
360°, thus forming 73 samples for every image.
Again, those corresponding to 0° have been used for
training, and the others, for testing.
3.4 Dataset E (Brodatz Database)
Finally, we considered using a texture database
having very different background intensities. The
Brodatz album available in (Safia, 2013) has 112
texture images, which have been resized from 640 x
640 to 128 x 128 pixels.
Here again we rotated images with 5° step, from
0° to 360°, thus forming 73 samples for every
image. Once more, those corresponding to 0° have
been used for training, and the others, for testing.
Table 1 exhibits, for each dataset, information
about the experiments. The classifier has been
trained and tested 50 times for each dataset.
Rotation-InvariantImageDescriptionfromIndependentComponentAnalysisforClassificationPurposes
213
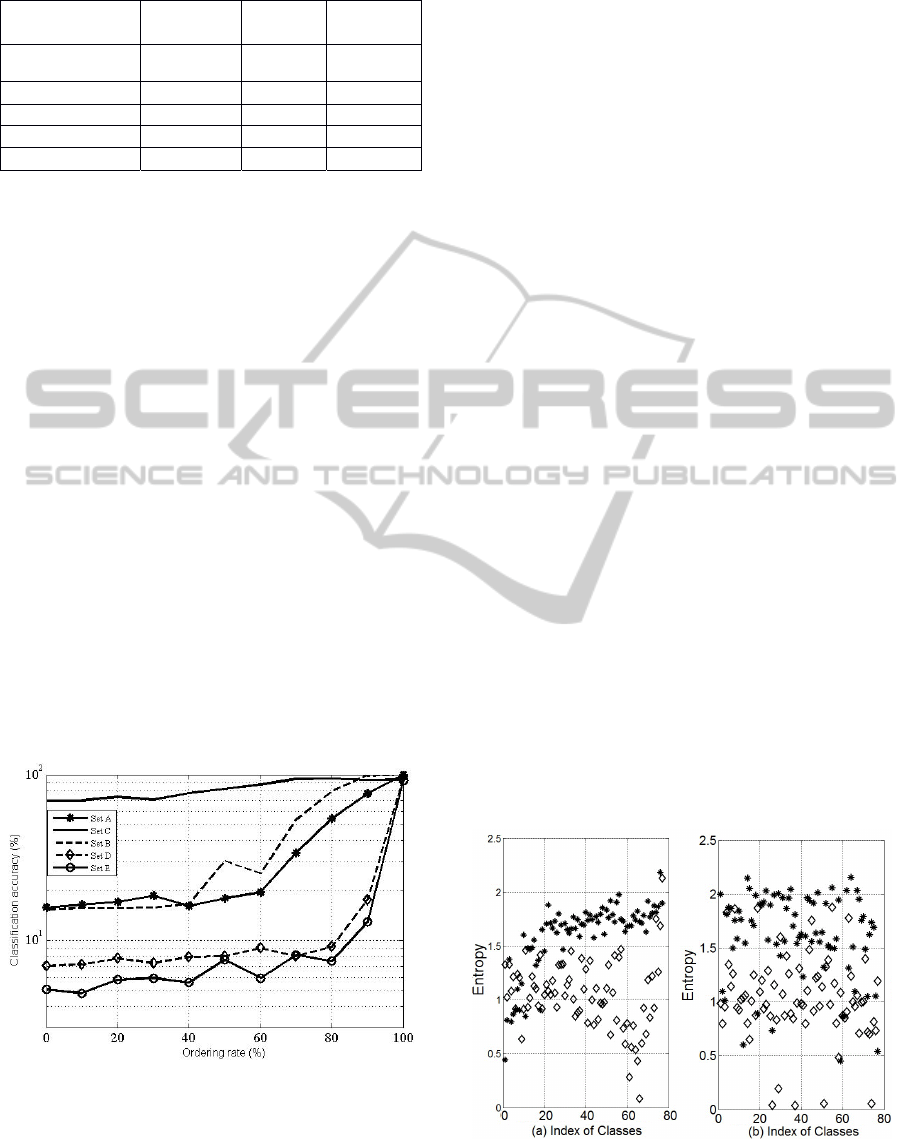
Table 1: Parameters for every experiment done.
Image set
(pixels)
Number of
Coefficients
Samples of
Training
Samples of
Testing
Set A
(1024×1024)
12 12 4320
Set B (512×512)
7 7 2520
Set C (50×64)
18 18 150
Set D (128×128)
77 77 5544
Set E (128×128)
112 112 8064
4 RESULTS
Figure 4 displays the mean recognition rates for the
experiments using the proposed ordering method.
Limits of x-axis indicate ranging from non-ordering
(hence, traditional ICA approach) to full-ordering.
Ordering rate appearing in x-axis indicates the
amount of elements of a given input vector
undergoing the ordering transformation λ.
This result is impressive because it shows that
our approach shifts the performance of the ICA-
based classification system from as low as 5% to
near 100% after the full-ordering of the input
vectors.
A less remarkable but not a negligible result has
been obtained with the low-resolution dataset C,
which showed an increasing performance on the
recognition rates from 70.00% to about 93.33% after
the ordering transformation.
Overall, clearly an ascendant trend comes out
from this analysis, i.e., ordering images has the
positive effect of making the classification accuracy
higher.
Figure 4: Mean recognition rates obtained for
classification experiments with the various datasets.
We associate the above effect on the results with
the increase of non-gaussianity in the data, leading
to better ICA representation. We explain that on the
basis of the improved non-gaussianity achieved on
the independent components when ordering
transformation is applied and when it is omitted.
Indeed, as explained in section 4.2 of (Hyvärinen
et al., 2001), the estimation of the independent
components of the ICA model relies on the
maximization of non-gaussianity of a linear
transformation of the observed data, x. If the data is
presented in such a way to increase non-gaussianity
a priori, the esimation of the ICA model is favoured.
That is our claiming.
In order to provide support for this claiming, we
proceeded to measure the non-gaussianity for the
datasets D and E, only. Since the transformation λ
changes the way the input data is presented to the
ICA algorithm, thus modifying the ICs, one should
verify changes in the non-ordered case as compared
to the full-ordering scenario.
One should also compare the independent
components provided by the ICA representation in
both scenarios. We emphasize that the next results
will not consider partial ordering scenario, as in
Figure 4, but only null or full-ordering instead.
Entropy is calculated by performing 150 rounds
to extract and provide average values. This is due to
the random initialization of the mixing matrix A as
calculated from the FastICA algorithm.
By following this procedure, the algorithm
prevents the calculated non-gaussianity to be
dependent on any initial condition. Figures 5 and 6
summarize the non-gaussianity measurements for
datasets D and E, respectively.
Figures 5a and 6a show that the non-gaussianity
increases in the whitened data after full-ordering (to
see this, note that the lower the entropy, the lower
the gaussianity. The scenario of this augmented non-
gaussianity also occurred in the calculated ICs.
Figures 5b and 6b display this trend.
Figure 5: Entropy of the variables for set D: a) whitened z
(asterisk) and z
order
(diamond); b) independent components
s (asterisk) and s
order
(diamond).
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
214
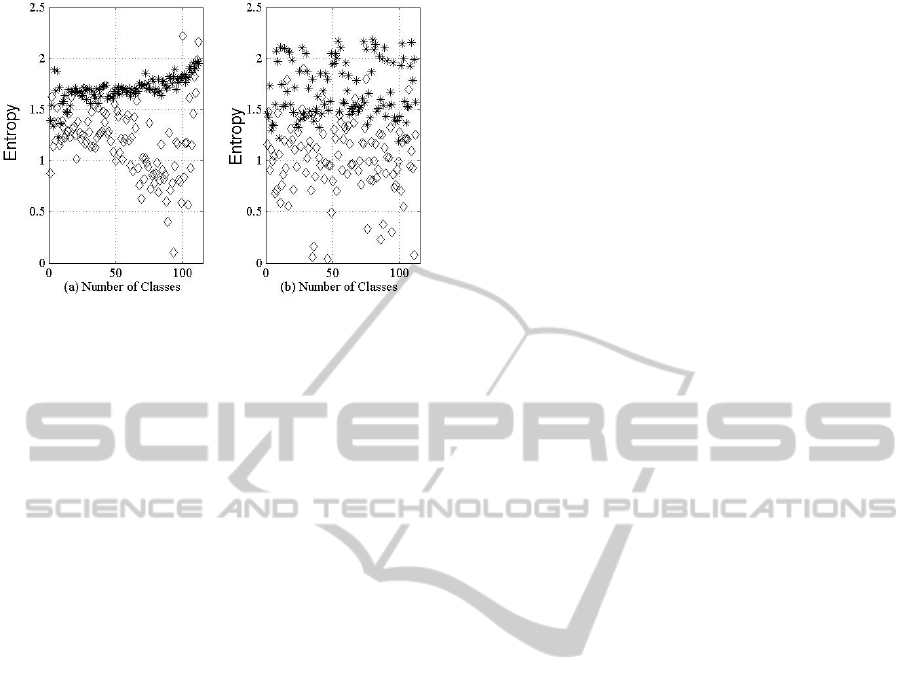
Figure 6: Entropy of the variables for set E: a) whitened z
(asterisk) and z
order
(diamond); b) independent components
s (asterisk) and s
order
(diamond).
Altogether, Figures 5 and 6 reveal a separation
between diamonds (ordered case) and asterisks (non-
ordered case), pretty like a “frontier”, which is more
evident for the datasets A and B (not shown here for
brevity).
4 CONCLUSIONS
In this paper, a preprocess for extracting rotation-
invariant features using independent component
analysis is proposed. Although ICA can be directly
used for feature extraction, it often requires data
preprocessing. Thus, our approach may be thought
as a preprocessing, in which the input data undergo
full or partial ordering. Experiments performed on
four different image datasets showed how the
ordering transformation improved the representation
of feature vectors, which are inputs to the classifier,
i.e., the mixing matrix of the ICA model.
Tests were carried out on rotated images to
evaluate the efficiency of the method. The increased
classification accuracy rate ranging from 5% to near
100% (in high-resolution images) and from 70.00%
to 93.33% (in low-resolution images) suggests the
use of the proposed technique as a useful input data
preprocessing. The entropy and kurtosis measures
confirmed that the increased non-gaussianity of the
estimated independent components improved the
representation of the feature vectors provided by the
ICA model.
Summing up, although the ordering of pixels of
an image does not affect its histogram, we showed
that it is helpful in making the feature extraction
from ICA a good alternative for rotation-invariant
image recognition. As a future work, other
approaches for rotation-invariant feature descriptors
will be studied and compared to the alternative here
discussed.
ACKNOWLEDGEMENTS
The authors acknowledge CAPES for financial
support and FUNCAP (PP1-0033- 00032.01.00/10).
Authors finally thank NUTEC, for administrative
facilities.
REFERENCES
Ali, A., Gilani, A. M., Memon, N. A., 2006. Affine
Normalized Invariant functionals using Independent
Component Analysis. Multitopic Conference.
INMIC ’06. IEEE, pp. 94-99, 23-24 December.
Bach, F. R., Jordan, M. I., 2002. Kernel Independent
Component Analysis, Journal of Machine Learning
Research, vol. 3, pp. 1-48.
Bell, A. J., Sejnowski, T. J., 1995. An Information-
Maximization Approach to Blind Separation and Blind
Deconvolution, Neural Computation, vol. 7, pp. 1129–
1159.
Bizon, K., Lombardi, S., Continillo, G., Mancaruso, E.,
Vaglieco, B. M., 2013. Analysis of Diesel Engine
Combustion using Imaging and Independent
Component Analysis. Proceedings of the Combustion
Institute, vol. 34, pp. 2921-2931.
Cardoso, J. F., 1989. Source Separation using Higher
Order Moments, ICASSP, in: Proceedings of the IEEE
International Conference on Acoustics, Speech and
Signal Processing, vol. 4, pp. 2109–2112.
Chattopadhyay, A. K., Mondal, S., Chattopadhyay, T.,
2013. Independent Component Analysis for the
Objective Classification of Globular Clusters of the
Galaxy NGC 5128, Computational Statistics & Data
Analysis, vol. 57, issue 1, pp. 17-32.
Cichy, R., Pantazis, D., Oliva, A., 2013, “Mapping Visual
Object Recognition in the Human Brain with
Combined MEG and fMRI”, Journal of Vision, vol.
13, n. 9, pp. 659.
Coomans, D., Massart, D. L., 1981. Alternative k-Nearest
Neighbor Rules in Supervised Pattern Recognition.
Part. 1. k-nearest neighbor classification using
alternative voting rules. Analytica Chimica Acta, vol.
136, pp. 15-27.
Cover, T. M., 1968, Estimation by the Nearest Neighbor
Rule, IEEE Transactions on Information Theory, vol.
14, issue 1, pp. 50-55.
Déniz, O., Castrillón, M., Hernández, M., 2003. Face
Recognition using Independent Component Analysis
and Support Vector Machines. Pattern Recognition
Letters, vol. 24, issue 13, pp. 2153-2157.
Fan, L., Long, F., Zhang, D., Guo, X., Wu, X., 2002.
Applications of independent component analysis to
image feature extraction, Second International
Rotation-InvariantImageDescriptionfromIndependentComponentAnalysisforClassificationPurposes
215

Conference on Image and Graphics, vol. 4875, pp.
471-476.
Hastie, T., Tibshirani, R., 2003. In: Becker, S., Obermayer,
K. (Eds.), Independent Component Analysis through
Product Density Estimation in Advances in Neural
Information Processing System, vol. 15, MIT Press,
Cambridge, MA, pp. 649–656.
Huang, Z., Cohen, F. S., 1996, “Affine-invariant B-Spline
moment for curve matching”, IEEE Trans. Image
Process., vol. 5, n. 10, pp. 1473-1490.
Huang, X., Wang, B., Zhang, L., 2005. A New Scheme for
Extraction of Affine Invariant Descriptor and Affine
Motion Estimation based on Independent Component
Analysis, Pattern Recognition Letters, vol. 26, issue 9,
pp. 1244-1255.
Hyvärinen, A., Karhunen, J., Oja, E., 2001. Independent
Components Analysis. John Wiley & Sons, Inc.,
Canada (Chapter 6–8).
Hyvärinen, A., Oja, E., 2000. ‘Independent Component
Analysis: Algorithms and Applications’, Neural
Networks, vol. 13, pp. 411–430.
Jutten, C. and Herault, J., “Blind separation of sources,
part I: An adaptive algorithm based on neuromimetic
architecture”, Signal Processing, vol. 24, pp. 1-10,
1991.
Khalil, M. I., Bayoumi, M. M., 2002, “Affine invariants
for object recognition using the wavelet transform”,
Pattern Recognition Letters, vol. 23, pp. 57-72.
Khorshidi, G. S., Douaud, G., Beckmann, C. F., Glasser,
M. F., Griffanti, L., Smith, S. M., 2014. Automatic
denoising of functional MRI data: Combining
independent component analysis and hierarchical
fusion of classifiers, NeuroImage, vol. 90, pp. 449-
468.
Lima, M. A. A., Cerqueira, A. S., Coury, D. V., Duque, C.
A., 2012. A Novel Method for Power Quality Multiple
Disturbance Decomposition based on Independent
Component Analysis, International Journal of
Electrical Power & Energy Systems, vol. 42, issue 1,
pp. 593-604.
Lin, T.-Y., Chiu, S.-H., 2013. Using Independent
Component Analysis and Network DEA to Improve
Bank Performance Evaluation, Economic Modelling,
vol. 32, pp. 608-616.
Masoum, S., Seifi, H., Ebrahimabadi, E. H., 2013.
Characterization of Volatile Components in
Calligonum Comosum by Coupling Gas
Chromatography-Mass Spectrometry and Mean Field
Approach Independent Component Analysis,
Analytical Methods, vol. 5, issue 18, pp. 4639-4647.
Mercimek, M., Gulez, K., Mumcu, T. V., 2005. Real
Object Recognition using Moment Invariants.
Sadhana, vol. 30, issue 6, pp. 765–775.
Mukundan, R., Ong, S.H., Lee, P.A., 2001. Image analysis
by Tchebichef moments, IEEE Trans. Image Process.
vol. 10, issue 9, pp. 1357-1364.
Oirrak, A. E., Daoudi, M., Aboutajdine, D., 2002. Affine
Invariant Descriptors using Fourier Series. Pattern
Recognition Letters. vol. 23, pp. 1109-1118.
Pan, H. et al, 2013, “Efficient and Accurate Face Detection
using Heterogeneous Feature Descriptors and Features
Selection”, Computer Vision and Image
Understanding, vol. 117, n. 1, pp. 12-28.
Park, B., Kim, D-S., Park, H-J., 2014. Graph Independent
Component Analysis Reveals Repertoires of Intrinsic
Network Components in the Human Brain. PLoS ONE
9(1): e82873. doi:10.1371/journal.pone.0082873.
Rojas, F., García, R. V., González, J., Velázquez, L.,
Becerra, R., Valenzuela, O., B. Román, S., 2013.
Identification of Saccadic Components in
Spinocerebellar Ataxia Applying an Independent
Component Analysis Algorithm, Neurocomputing, vol.
121, pp. 53-63.
Safia A., He D., 2013. New Brodatz-based Image
Databases for Grayscale Color and Multiband Texture
Analysis, ISRN Machine Vision, Article ID 876386, 1.
Available at http://multibandtexture.recherche.
usherbrooke.ca/original_brodatz.html.
Sanchetta, A. C. et al, 2014, “Facies Recogniton using a
Smoothing Process through Fast Independent
Component Analysis and Discrete Cosine Transform”,
Computer & Geosciences, vol. 57, pp. 175-182.
Sindhumol S., Kumar, A., Balakrishnan, K., 2013.
Spectral Clustering Independent Component Analysis
for Tissue Classification from Brain MRI, Biomedical
Signal Processing and Control, vol. 8, issue 6, pp.
667-674.
Tong, Y., Hocke, L.M., Nickerson, L.D., Licata, S.C.,
Lindsey, K.P., Frederick, B.D., 2013. Evaluating the
Effects of Systemic Low Frequency Oscillations
Measured in the Periphery on the Independent
Component Analysis Results of Resting State
Networks, NeuroImage, vol. 76, pp. 202–215.
Yuen, P. C., Lai, J. H., 2002. Face Representation using
Independent Component Analysis. Pattern
Recognition, vol. 35, pp. 1247-1257.
Zhao, A., Chen, J., 1997. Affine Curve Moment Invariants
for Shape Recognition. Pattern Recognition. vol. 30,
issue 6, pp. 895-901.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
216
