
ROCL: New Extensions to OCL
for Useful Verification of Flexible Software Systems
Hanen Grichi
1, 2
, Olfa Mosbahi
3
and Mohamed Khalgui
3
1
Tunisia Polytechnic School, Ariana, Tunisia
2
Institut Superieur d’Informatique, University of Tunis el Manar, Tunis, Tunisia
3
National Institute of Applied Science and Technology, University of Carthage, Tunis, Tunisia
Keywords:
Flexible Real-time System, Reconfiguration, Object Constraint Language, Metamodelling and Validation,
Wireless Sensor Network.
Abstract:
The paper deals with the verification of reconfigurable real-time systems to be validated by using the Object
Constraint Language (abbrev, OCL). A reconfiguration scenario is assumed to be any adaptation of the execu-
tion to the system environment according to user requirements. Nevertheless, since several behaviors can be
redundant from an execution to another, the use of OCL is insufficient to specify the constraints to be satisfied
by this kind of systems. We propose an extension of OCL, named Reconfigurable OCL, in order to optimize
the specification and validation of constraints related to different execution scenarios of a flexible system. A
metamodel of the new ROCL is proposed with formal syntax and semantics. This solution gains in term of the
validation time and the quick expression of constraints. The paper’s contribution is applied to a case study that
we propose to show the originality of this new language.
1 INTRODUCTION
Nowadays, the embedded systems migrate to an auto-
programming technology which is based on intelli-
gent architecture (J.Bellis et al., 2005). The system
can change its behavior at run-time; it is what we
call an adaptive system or reconfigurable one. The
researchers in (M. Bocca and Eriksson, 2009), (Har-
ish Ramamurthy, 2005), (Handziski et al., 2005) and
(Kindratenko1 and Pointer, 2005) define the reconfig-
urable system as an adaptive embedded architecture.
In a recent work, (H.Grichi et al., 2014), we define a
reconfiguration of a distributed system as any addi-
tion/removal/update of one/more software-hardware
elements. The reconfiguration touches first the mate-
rial (allowing the activation/deactivation of elements),
second the software (allowing the reconfiguration of
tasks) and third the communication protocols (allow-
ing the adaptation of routing protocols between ele-
ments). We proceed in this paper to validate a flexible
system design. The validation phase is an interactive
process to control the system behavior. Indeed, this
is what ensures that the system will operate properly
and will meet the expected design features, either in
quality or durability. Recent researches (Baar, 2010),
(Conrad and Turowski, 2001) tend to verify the tem-
poral constraints in the model of real-time systems,
using the OCL language. In (Sendall and Strohmeier,
2001), the authors propose a UML-based approach,
for specifying concurrent behaviors and optimize tim-
ing constraints on UML state machines. In (Cengarle
and Knapp, 2002) the authors propose an extension
of the Object Constraint Language to model real-time
and reactive systems by using the Unified Modeling
Language, called OCL/RT.
The adaptive behaviors of any reconfigurable sys-
tem can share redundant executions that should meet
the same properties as described in user requirements.
We assume that a flexible system (a multitude of sys-
tem instances from one model), can be designed us-
ing a set of models such that each one generates a
set of instances. Each instance can share a set of ob-
jects with others under required properties. In this
case, the verification is complicated and the use of
OCL is insufficient to specify and verify the different
constraints in optimal times. Indeed, some properties
can be verified several times when the corresponding
instances are checked. To validate in practice UML
models of flexible systems by using OCL, we should
write the different constraints in mass (present du-
plication in the use of objects). We also note that
OCL has no constraints on the properties of attributes,
45
Grichi H., Mosbahi O. and Khalgui M..
ROCL: New Extensions to OCL for Useful Verification of Flexible Software Systems.
DOI: 10.5220/0005522700450052
In Proceedings of the 10th International Conference on Software Engineering and Applications (ICSOFT-EA-2015), pages 45-52
ISBN: 978-989-758-114-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

which can be linked together in the same UML class
(one object) or emergent properties on the attributes
of multiple classes (multiple objects). Since we deal
with flexible systems, all these limitations of OCL
language, become a problem for the validation of flex-
ible systems.
We propose a new language in order to control
the verification complexity of reconfigurable systems.
We propose an extension of OCL, named Reconfig-
urable OCL, in order to optimize the specification and
validation of constraints related to different execu-
tions of dynamic systems. A metamodel of the new
ROCL is proposed with formal syntax and semantics.
Our solution gains in term of validation time and the
quick expression of constraints because we can re-
duce the redundancy in the expression of constraints.
We apply the paper’s contribution to a case study
of a flexible system to show the benefice and the orig-
inality of this new language. We deal in (H.Grichi
et al., 2014) with Reconfigurable Wireless Sensor
Networks (to be denoted RWSN). After that we ver-
ify this RWSN in (H.Grichi et al., 2015) by using a
Timed Automaton and use the UPPAAL environment
(G. Behrmann and Larsen, ) to apply a formal veri-
fication of our system. We are interested now in the
current paper in the validation step of RWSN where
we apply ROCL to gain in: (i) validation time of the
flexible system, in particular the RWSN, and in term
of (ii) the expression of constraints by elimination of
the redundancy in the expression of constraints.
The paper is organized as follows: after introduc-
tion and background. Section 3 proposes a case study
to be used in the totality of this paper. Section 4
presents the reconfigurable OCL language before con-
cluding the paper in Section 5.
2 BACKGROUND
We briefly present some concepts and formalisms to
be used in the following.
2.1 Flexible Systems
An embedded control system is a computer with a
dedicated function within a larger mechanical or elec-
trical platform, often with real-time computing con-
straints (Heath, 2003). Modern flexible embedded
systems are often based on auto-programming tech-
nology. These systems are based on intelligent ele-
ments (J.Bellis et al., 2005). Since the flexible em-
bedded control system, or reconfigurable one, is dedi-
cated to specific tasks, design engineers can optimize
it to reduce the size and cost of the product and in-
crease the reliability and performance. These types of
systems are able to make substantial changes to the
data-path in addition to the control flow at run-time.
The architecture of a reconfigurable system combines
flexible software and hardware components. The re-
configuration flexibility emerges in three parts; the
software (operation), the hardware (architecture) and
the communication between the elements of the sys-
tem. Many projects, such as (Gharbi and Khalgui,
2014), (Chen et al., 2014a) and (Chen et al., 2014b)
deal with flexible embedded control systems. We re-
mark that, in these research, the definition of recon-
figuration touches one or two reconfiguration forms
(hardware, software or protocol) since they do not
mix all of them. Our last research (H.Grichi et al.,
2014) deals with the reconfigurable wireless sensor
networks (RWSN) that we define like a flexible system
combining hardware/software/communication recon-
figurations together. We are interested in (H.Grichi
et al., 2015) to the verification of RWSN system using
a formal modeling and simulated with the environ-
ment UPPAAL. In this paper we try to validate RWSN
by using an extension of a current constraint valida-
tion language to show if our system is ’correct’ ac-
cording to different behaviors.
2.2 OCL-based Validation in Related
Works
This clause describes the Object Constraint Language
(OCL) (OMG, 2010), as a textual language to de-
scribe constraints on any element of UML models
(OMG, 2009). OCL is a modeling language in the
first place. Before version 2.0, OCL uses natural lan-
guage (English), no rules are laid on the expression
of these conditions. With the arrival of OCL2.0, OCL
constraints are now defined by a metamodel. We note
that OCL language does not answer to the require-
ments of flexible system designers.
Recent researches tend to verify the temporal con-
straints modeled in the UML models of flexible sys-
tems. For that the authors in (Baar, 2010),(Con-
rad and Turowski, 2001) use the formal Object Con-
straint Language (OCL) for precisely defining the
well-formedness rules of UML models on the meta-
model level modeling the embedded control system.
In (Sendall and Strohmeier, 2001) the authors propose
a UML-based approach, for specifying concurrent be-
havioral and temporal constraints on UML state ma-
chines. This approach shows how the authors en-
riched operation schemas (pre/post condition) asser-
tions of system operations written in OCL and to
describe how they can use a new and existing con-
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
46

structs for UML state machines to specify temporal
constraints on the system. The OCL language is a
good means of validation and verification constraints
in embedded control systems, but if we deal with
the flexible and reconfigurable ones, this language
presents some limits, cited in introduction, such that
the validation time of object and the expression of
constraints.
We propose in this paper an extension of OCL
language in order to define well a set of constraints
that respond to the reconfiguration in flexible systems.
Due to characteristics of reconfigurable real-time sys-
tems and in order to analyze them better, we tend
to modelize and verify well our system in particular
its run-time reconfiguration. Generally, finding good
models is a challenging task.
3 CASE STUDY
We start by exposing the case study that we will be
assumed as a running example in the following. This
case study is detailed in (H.Grichi et al., 2014) and
deals with Reconfigurable Wireless Sensor Networks.
3.1 RWSN
3.1.1 Terminology
In a previous work (H.Grichi et al., 2014), we define
a reconfiguration scenario as a structured sequence
of reconfiguration operations. Each operation in this
scenario is a transition from configuration to another
which is triggered as a response to reconfiguration re-
quests under particular conditions, in order to adapt
the system to its environment and improve also its
performance. We consider three kinds of reconfigu-
rations: software, hardware and protocol reconfigura-
tion. We denote in the following by RWSN, reconfig-
urable WSN that automatically modifies its software,
hardware and comunication protocol. We propose a
zone-based architecture to model the reconfiguration
in a WSN. To handle all reconfiguration forms, we
propose a multi-agent architecture for RWSN. This ar-
chitecture is composed of a Controller Agent (CrA)
that controls the whole architecture, a Zone Agent
(ZA) to be affected to each zone in order to control
its nodes, and a Slave Agent (SA) that controls each
node of any zone. All these agents handle different
reconfiguration forms that we described above.
3.1.2 Metamodel
After definition of the RWSN architecture and verifi-
cation with UPPAAL environment, we are interested
to the modeling phase by using UML language to be
verified with OCL in order to verify the temporal con-
straint of our flexible system. We present a part of
RWSN metamodel which presents the design of the
WSN controlled by the SmartAgent system to model
all reconfiguration forms.
We propose in (Figure 1) our RWSN to be com-
posed of a set of Zones and a Station. We use a design
pattern composite to model this structure. We define a
component: WSN class, which specifies the required
behavior and composite objects (Station and Zone
classes). We use this pattern because we have a com-
posite (Zone class) that contains components, where
each one could be a composite. Each zone is com-
posed of a set of nodes defined in Node class, each
one is composed of a set of sensor modeled by Sen-
sor Element Class. Battery Element class stores
the energy load in battery at run-time.
WSN class executes a strategy of reconfigura-
tion. We define ControllerAgent, ZoneAgent and
SlaveAgent classes that inherit from an abstract inter-
face Strategy
Reconfig. The Command design pat-
tern defines the behavior of agents. Each agent has a
reconfiguration order to be executed on concrete ob-
jects (Zone and Node classes). We add the last de-
sign pattern singleton to model the Clock class. With
this structure, we can calculate the execution time of
agents and the cost of reconfiguration scenarios.
3.2 Application of RWSN
We propose a Reconfigurable Wireless Sensor Net-
work named (Sys). It is composed of 2 zones
(Z1, Z2) where each one is composed of two
nodes. We suppose initially that all nodes are ac-
tivated. We apply 3 forms of reconfigurations: (1)
Software Reconfiguration: We define two tasks {T1,
T2}: (i) T1: controls the temperature and detects sig-
nal when it is higher than 40
◦
C. (ii) T2: reduces the
threshold from 40
◦
C to 20
◦
C.
We define 2 software reconfigurations: {SR1,
SR2}. (a) SR1: reconfiguration that allows the addi-
tion of (T1) to each node in a summer day; (b) SR2: is
applied to each summer night to remove the task (T1)
and to add (T2).
(2) Hardware Reconfiguration: In order to minimize
the dissipated energy, we apply hardware reconfig-
uration {HR} on one sensor node: (i) HR: deacti-
vates Nz1 from Z1, The hardware reconfiguration, in
this case, can change the routing information between
nodes.
(3)Protocol Reconfiguration: If we apply HR, the
routing information of (Nz1) will be changed: Nz2
ROCL:NewExtensionstoOCLforUsefulVerificationofFlexibleSoftwareSystems
47
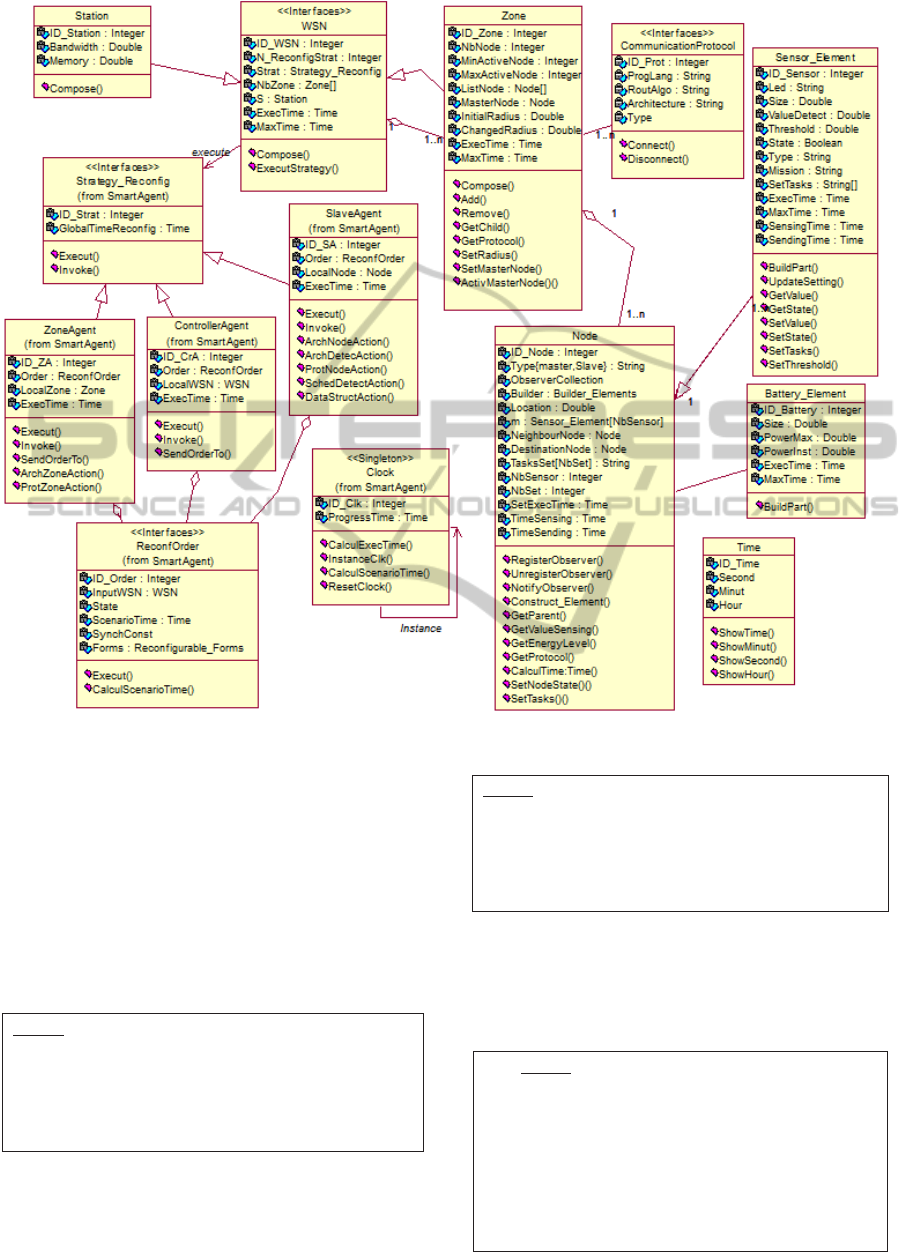
Figure 1: RWSN metamodel with UML.
changes the neighbors node, it sends data directly to
Nz3.
We write some time constraints that we want to
verify with OCL. We propose three global constraints
relative to the reconfiguration: (i) Constraint 1: If a
reconfiguration scenario is activated, the relevant re-
configuration operations must be active in terms of
their timing constraints (to deal with priorities). (a) If
the constraint of synchronization between operations
is simultaneous (AND):
nization between operations is simultaneous (AND):
OCL1: context Op := ReconfigOrder inv:
self.SynchConst → forall (Forms kForms.name =
HardwareRecon f ig k Forms.name =
So f twareRecon f ig k Forms.name =
ProtocolRecon f ig implies (Op.state =
”activated” and sel f .state = ”activated”))
(b) If the constraint synchronization between op-
erations is optional (OR):
between operations is optional ( ):
OCL2: context Op:= ReconfigOrder inv:
self.SynchConst → forall (Forms kForms.name =
HardwareRecon f ig k Forms.name =
So f twareRecon f ig k Forms.name =
ProtocolRecon f ig implies (Op.state =
”activated” or sel f.state = ”deactivated”))
(ii) Constraint 2: Each reconfiguration operation
is relative to two constraints: start condition (START)
and end condition (END) that respectively model the
activation and deactivation of the reconfiguration op-
erations.
activation of the reconfiguration operations.
OCL3: context Op:=ReconfOrder::Execut() :
Boolean
pre START : WSN.allInstances-→
exists ( x — x.state= ’activated’) and
WSN.allInstances → size = 1
post END : (WSN.allInstances -
WSN.allInstances@pre)
→forAll(Op—Op.oclIsNew()
and (Op.allInstances→ size = NULL)
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
48
In each instance, we should verify all objects in-
cluding those shared with other instances. This point
presents a weakness of the OCL language as well as
the number of properties to be written. The sum of
the properties to write is: Nb Prop= 20+ 25= 45.
With OCL we can not reduce the writing prop-
erties, because this language does not allow writing
parameterized expressions. By using OCL, we find
some redundancies during validation of these objects.
We find also similar objects during the validation of
the first and second object diagram.
4 CONTRIBUTION:
RECONFIGURABLE OBJECT
CONSTRAINT LANGUAGE
We present in this section the Reconfigurable Object
Constraint Language.
4.1 Motivation
By considering the weak points of OCL language for
the validation of flexible systems, we propose an ex-
tension of OCL named Reconfigurable OCL. In order
to define well the set of constraints that respond to
the reconfiguration in flexible systems, we propose,
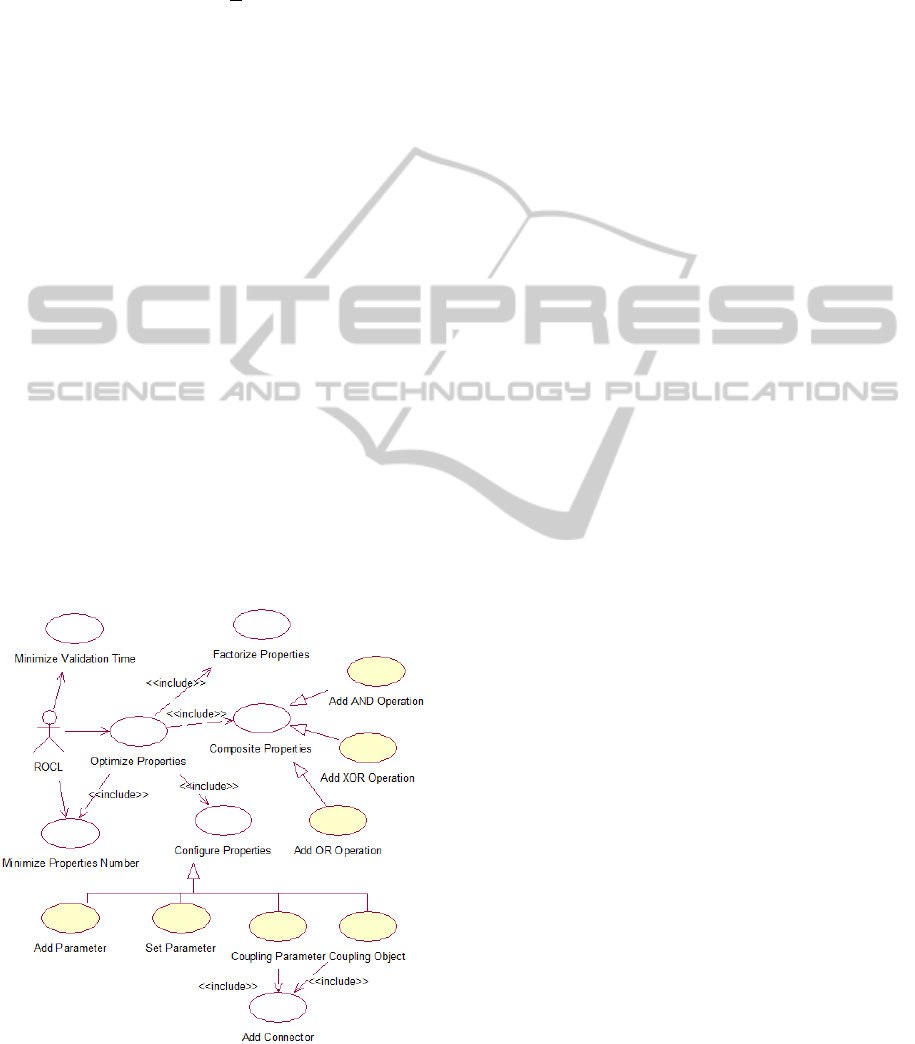
in Figure 2, different services of ROCL by using UML
language with a use case diagram.
Figure 2: ROCL services.
With ROCL, we can minimize the validation
time and optimize of properties to be verified,
by minimizing its number. The optimization of
properties include: (i) the configuration of them by
the definition of a changed parameter, dependent
to the implementations, (ii) the factorization of the
properties by the definition of a global properties
for all implementations and (iii) the composition
of properties by using one or more objects from
different instances in the same expression. We gain
in terms of validation time and in terms of number of
properties to be checked.
4.2 Specification of ROCL Language
In this section, we present the grammar of the ROCL
presenting the syntax and semantic of this language.
4.2.1 Syntax
The code is represented by a block of instructions,
which is itself composed of a set of operations or in-
structions. Since we’re going to add an extension to
OCL, we use the grammar of OCL enriched by a set
of operations.
//To specify explicitly in which package invari-
ant, pre or post-condition Constraints belong,
these constraints can be enclosed between ’pack-
age’ and ’endpackage’ statements forming an
ROCL file (RoclFile)
h RoclFilei ::= (package packageName
RoclExpressions
endpackage
) +
h RoclExpressions i ::=( Rconstraint
| h Rconstrainti ” h Rconstrainti
///Composite
properties
| ( Rconstraint (h Rglobalparametersi) ) /// Fac-
torize properties ) *
///An ROCL expression with stereotype ’invari-
ant’ the context of TypeName’ = ’another string’
h Rconstrainti ::= ’context ’ TypeName ’inv’
| ( stereotype name? ’:’ RoclExpression)
| ( stereotype name? ’:’ RoclExpression
( Instance , RParameterList )
/// assign to
each instance the set of parameters to be checked
) +
/// We define an Instance as a snapshot of class
diagram at an instant t started with a letter I suc-
ceeded by a number
hInstancei ::= I InstanceName
ROCL:NewExtensionstoOCLforUsefulVerificationofFlexibleSoftwareSystems
49

RUNNING EXAMPLE: /// We should verify for
each Instance I1, I2 the number of zones by
assigning to each one a parameter to be checked
Context Z : Zone :: SetNbZone()
Pre NbZone ((I1,3), (I2,5))
hInstanceNamei ::= number
We associate to each constraint a reconfigurable
parameter with a ’returnType’
hRglobalparametersi ::= ( RParameterList )
( : returnType )?
hRParameterListi ::= ( ( name : RtypeSpecifier )
| ( name ’:’ RtypeSpecifier (Rconnectorname
name ’:’ RtypeSpecifier )*
///Coupling param-
eters
) ? .////add a connector for coupling between
RUNNING EXAMPLE: ///We verify that the node
energy at an instant t should be less that the
maximum value of energy by coupling two
parameters.
Context N : Node :: GetEnergyLevel()
Pre: PowerInst (Proces Element, Battery Element)
≤ PowerMax
parameters
hRconnectornamei ::= name | ’,,’ | ’,’
///add a new operation for the composition be-
tween constraint expressions
hRoperationNamei ::= name | ’OR’ | ’XOR’ |
’AND’
///define a reconfigurable type associate to each
parameter
hformalParameterListi ::= ( name ’:’ Rtype-
Specifier
( ’:’ name ’:’ RtypeSpecifier ) * ) ?
hRtypeSpecifieri ::= simpleTypeSpecifier
| collectionType | RconfigType
///Add new re-
configurable types to model the flexible system
hReconfigTypei ::= CrA | ZA | SA | clk
RUNNING EXAMPLE: ///verify the activation of
controller Agent before the execution of the
reconfiguration strategy
Context S:Strategy Reconfig
inv (C1 : CrA) OR (C2 : ZA)
S :: Execut() pre: C1.activate
To see the gain of our contribution compared to
the classic OCL language, we present the constraints,
defined before, with ROCL
(i) Constraint 1: If a reconfiguration scenario
is activated, the relevant reconfiguration operations
should be active in terms of their timing constraints
(to deal with priorities).
(a) If the constraint synchronization between opera-
tions is simultaneous (AND):
tions is simultaneous (AND):
ROCL1: context Op:= ReconfigOrder inv:
IF self. SynchConst : SetReconfig Hard-
wareReconfig, SoftwareReconfig, Protocol-
Reconfig implies (Op.state=activated and
self.state=activated))
(b) If the constraint synchronization between op-
erations is optional (OR):
operations is optional ( ):
ROCL2: context Op:= ReconfigOrder inv:
IF self. SynchConst : SetReconfig Hard-
wareReconfig, SoftwareReconfig, Protocol-
Reconfig implies Op.state=activated or
self.state=deactivated))
(ii) Constraint 2: Each reconfiguration operation
is relative to two constraints: start condition (START)
and end condition (END) that respectively model the
activation and deactivation of the reconfiguration op-
erations. We note that with ROCL we gain in the ex-
operations.
ROCL3: context Op:=ReconfOrder inv
START WSN.allInstances → exists ( x
kx.state = ”
′
activated”)
END : (W SN.allInstances → forAll (Op
kOp.oclIsNew() and (Op.allInstances → size
= NULL)
pression of constraints. Coupling and factorization
of constraints allows us to write a reduced expression
compared to the constraints written with OCL.
4.2.2 Semantics
In this section, we give a logical sense to the ROCL
service already presented. Define the semantics of a
formal language is to give a mathematical meaning
to allow the programmer to understand what the pro-
gram does. The semantics should help language de-
signers to define coherent, powerful and correct lan-
guages. In (Richters and Gogolla, 2002) the authors
present a detailed description of the OCL semantics.
We use the operational semantics (Subrahmanyam,
1992), (Kayser, 2003) to describe the meaning of the
ROCL language.
We start with the semantic of the first service of
ROCL language:
Service 1: Minimize Validation Time. To minimize
the validation time of constraints presented by a set of
properties, we should:
///verify the objects constraints in a first instance
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
50
Iter1: VERIF ([Obj1,Obj2, . Obj n], I 1) = Result1;
Calcul(VerfiTime1);/// save the verification time
///save the objects with their verifications in a data structure
SAVE (Result1, VerifTime1);
///check the objects added in the next instance (checks the
constraints on the newly added objects)
Iter2: VERIF ([Obj n+1,Obj n+2, . Obj m], I next) =
Result next;
CALCUL (VerfiTime1+VerfiTime next);
///update the data structure to store the new results
SAVE (Result next, VerifTime next);
///repeat the process to the last instance
INCREMENT (next); UNTIL I next =
/
0
Service 2: Minimize Properties Number. To minimize
the number of properties to be verified, we should:
///validate, in a first instance, the constraints on a set of
objects after that we save the number of verified properties
Iter1: VERIF ([Obj1, Obj2,, Obj n], I 1) = Result1;
///check the objects added in the next instance, we verify,
after that, the constraints on the newly added objects
VERIF ([Obj n+1,, Obj m], I 2) = Result2;
VERIF ([Obj m+1,, Obj fin], I fin) = Result fin;
Iter2: CALCUL (VerfiTime1,, VerfiTime Fin); /// updates
the number of verified properties CALCUL (NbProp);
Service 3: Factorize Properties. To define a global
property for all implementations, we should:
///validate, in a first instance, the constraints on a set of
objects
Iter1: VERIF ( [Obj1, Obj2, ., Obj n], I 1) = Result1;
////check if we have a similar objects in the set of instances
Iter2: IF (SIMILAR (Obj i IN I j ) ) == TRUE;
////verify only the similar object and write only one global
property for all implementations
VERIF (Obj i IN [ I 2, I 3, , I j ] )
WRITE (Prop (Obj i) )
CALCUL (NbProp);
Service 4: Composite Properties. In order to write
two or more properties in the same time we add a set of
operations: AND, OR and XOR.
///validate, in a first instance, the constraints on a set of
objects
Iter1: VERIF ([Obj1, Obj2, ., Obj n], I 1) = Result1;
///write a property associated to the first instance
WRITE ( {Prop j} , I 1);
///look for similar objects in the next instances
Iter2: IF (SIMILAR (Obj k IN I i ) ) == TRUE;
///write the constraints according to the used operator
WRITE (AND ({Prop j}, {Prop m}) , I i)); or
WRITE (OR ({Prop j}, {Prop m}) , I i)); or
WRITE (XOR ({Prop j}, {Prop m}) , I i)); or
CALCUL (VerfiTime j) xor CALCUL (VerfiTime m);
Service 5: Configure Properties. In order to optimize the
expression of constraints, we write a setting of properties.
We write a parameterized expressions (write only one prop-
erty and change its parameter depending on the instance)
///validate, in a first instance, the constraints on a set of
objects
Iter1: VERIF ([Obj1, Obj2, ., Obj n], I 1) = Result1;
///look for similar objects in the next instances
Iter2: IF (SIMILAR (Obj k IN I i ) ) == TRUE
///assign to each instance a parameter
AddPARAM (Pj TO Prop j);
///write a property with the according parameters
WRITE ( Prop j , [ I i , Pj] ); or
IF (Pj OR Pm ∈ OJECT ) == TRUE
///add another properties depending on the parameters type
/// If parameters type=classes
WRITE ( Prop j , [ I i , (Pj ,, Pm)] );
ELSE /// If parameters type=attribute
WRITE ( Prop j , [ I i , (Pj , Pm)] ); END IF
4.3 ROCL: Benefits in RWSN
With ROCL, we write a lesser number of constraints
compared to OCL language. For the verification time:
(i) the first instance (Inst1), we have 24 objects to ver-
ify for that we have 24 time units, (ii) the second in-
stance (Inst2), we have 19 objects.
Table 1: Comparison of Validation times between Inst1 and
Inst2.
Instance OCL Validation Time ROCL Valid Time
Inst1 24 24
Inst2 19 1
With OCL the total verification time is 43 units of
time, but with ROCL, the validation time is the sum
of the validation times of objects for the first instance
plus the validation times of new items added to the
next instances. We have no interest to check items
already checked before, just we should save the last
result: the total verification time is 1 time unit (for the
first instance), the second instance does not present
a new object to be checked. We observe a decrease
in the verification time: this is a benefit of the ROCL
language.
5 CONCLUSIONS AND
PERSPECTIVES
The OCL is a language used to verify constraints in
embedded control systems, but if we deal with flex-
ible and reconfigurable ones, this language presents
some limits, such as the validation time of objects
(increases after each instance) and the expression of
constraints (can present duplications in the use of ob-
jects). This paper proposes an extension of OCL,
named Reconfigurable OCL, in order to optimize the
specification and validation of constraints related to
different execution scenarios of a flexible system. We
propose a formal syntax and semantics of the new
ROCL:NewExtensionstoOCLforUsefulVerificationofFlexibleSoftwareSystems
51

ROCL language. This solution gains in term of val-
idation time and the quick expression of constraints.
To show the originality of this new language, we pro-
pose a metamodel of RWSN, like a case study, to be
verified with the ROCL. We plan in the future works
to develop a tool that allows the validation of flexi-
ble systems by using the ROCL as a formal validation
language.
REFERENCES
Baar, T. (2010). Experiences with the uml/ocl-approach to
precise software modeling.
Cengarle, M. and Knapp, A. (2002). Towards OCL
RT,2002, volume 2391 of Lecture Notes in Computer
Science. Springer Berlin Heidelberg.
Chen, X., Azim, A., Liu, X., Fischmeister, S., and Ma, J.
(2014a). DTS: dynamic TDMA scheduling for net-
worked control systems. Journal of Systems Architec-
ture - Embedded Systems Design, 60(2):194–205.
Chen, X., Azim, A., Liu, X., Fischmeister, S., and Ma, J.
(2014b). DTS: dynamic TDMA scheduling for net-
worked control systems. Journal of Systems Architec-
ture - Embedded Systems Design, 60(2):194–205.
Conrad, S. and Turowski, K. (2001). Temporal ocl: Meeting
specification demands for business components.
G. Behrmann, A. D. and Larsen, K. A tutorial on uppaal
in formal methods for the design of real-time systems.
volume 37. Springer Verlag, 3185 edition.
Gharbi, A. and Khalgui, M. (2014). Functional safety of
adaptive embedded control systems: new solutions.
IJCCBS, 5(3/4):300–353.
Handziski, V., Kopke, A., Willig, A., and Wolisz, A.
(November, 2005). Twist: A scalable and recon-
figurable wireless sensor network testbed for indoor
deployments. Technical report, Technical University
Berlin, Telecommunication Networks Group.
Harish Ramamurthy, B. S. Prabhu, R. G. (2005). Re-
configurable wireless interface for networking sensors
(rewins). 9th IFIP Interernational Conference on Per-
sonal Wireless Communincation, 15.
Heath, S. (2003). Embedded systems design. Linacre
House, Jordan Hill, Oxford.
H.Grichi, O.Mosbahi, and M.khalgui (16-19 March 2015.).
Formal specification and verification of reconfigurable
wireless sensor networks. 12th International Multi-
Conference on Systems, Signals & Devices : Con-
ference on Computers & Information Technology
(SSD15).
H.Grichi, O.Mosbahi, and M.khalgui (29-31 August 2014).
Reconfigurable wireless sensor networks: New adap-
tive dynamic solutions for flexible architectures. IC-
SOFT EA 2014, the 9th International Conference on
Software Engineering and Applications.
J.Bellis, S., Delaney, K., Barton, J., and Razeeb, K. M. (Aug
2005). Development of field programmable modular
wsn nodes for ambient systems. In In Computer Com-
munications, Special Issue on Wireless Sensor Net-
works, volume 13, pages 1531–1544.
Kayser, D. (30 May 2003). Abstraction and natural lan-
guage semantics. The Royal Society.
Kindratenko1, V. and Pointer, D. (2005). Mapping a sensor
interface and a reconfigurable. Communication Sys-
tem to an FPGA CoreSensor Letters, 3:174– 178.
M. Bocca, E. I. Cosar, J. S. and Eriksson, L. (July 2009). A
reconfigurable wireless sensor network for structural
health monitoring. 4th International Conference on
Structural Health Monitoring of Intelligent Infrastruc-
ture.
OMG (2010). Object constraint language specification.
OMG (February 2009). Omg unified modeling language
(omg uml).
Richters, M. and Gogolla, M. (2002). OCL: syntax, seman-
tics, and tools. In Object Modeling with the OCL, The
Rationale behind the Object Constraint Language,
pages 42–68.
Sendall, S. and Strohmeier, A. (2001). Specifying concur-
rent system behavior and timing constraints using ocl
and uml. In Proceedings of the 4th International Con-
ference on The Unified Modeling Language, Model-
ing Languages, Concepts, and Tools, pages 391–405,
London, UK, UK. Springer-Verlag.
Subrahmanyam, R. (1992). Data abstraction in program-
ming language semantics.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
52
