
Socio-cyberphysical System for Proactive Driver Support
Approach and Case Study
Alexander Smirnov
1,2
, Nikolay Shilov
1,2
and Oleg Gusikhin
3
1
SPIIRAS, 39, 14 Line, St. Petersburg, Russia
2
ITMO University, 49, Kronverkskiy pr., St. Petersburg, Russia
3
Ford Motor Company, 2101, Village Rd., Dearborn, Michigan, U.S.A.
Keywords: Infomobility, Information Driver Support System, Proactive Collaborative Recommendation System,
Service Fusion, Parking Assistance.
Abstract: Recent developments in the areas of decision support, data and decision mining, on-board infotainment
systems have produced valuable results that can be used to support people in different aspects of their lives.
Infomobile driver support is one of the possible applications of these, what can significant increase the
quality of the user experience. The paper presents a developed approach and enabling technologies for
implementation of an intelligent driver support system that takes advantages provided by such modern
developing technologies as context-based collaborative recommendation systems, proactive information
support, smart space, and V2V communication. The developed concept is illustrated via a parking assistance
scenario.
1 INTRODUCTION
Recent developments in the areas of decision
support, data and decision mining, recommendation
systems have produced valuable results that can be
used to support people in different aspects of their
lives.
Cyberphysical systems tightly integrate
heterogeneous resources of the physical world and
IT world. Socio-cyberphysical systems go
significantly beyond the ideas of the current progress
in cyber-physical systems, socio-technical systems
and cyber-social systems to support computing for
human experience (Sheth, et al., 2013). They tightly
integrate physical, cyber, and social worlds based on
interactions between these worlds in real time. Such
systems rely on communication, computation and
control infrastructures commonly consisting of
several levels for the three worlds with various
resources as sensors, actuators, computational
resources, services, humans, etc. (Teslya, et al.,
2014).One of promising tasks is integration of
different mobile applications with on-board
infotainment systems.
There are exist various techniques aimed at
driver support based on the analysis of information
from various devices and sensors. Those, which are
based on the information accumulated within one
car, are commercially available (e.g., parking
assistance systems). Cyberphysical networks provide
for extended possibilities in this area. Integration of
several nearby cars with their sensors into one
cyberphysical network makes it possible to increase
the quality of situation detection (e.g., sharing
information about free parking slots) and to provide
for certain situation development prediction (sharing
information about parking slots that are currently
being occupied or will be in the nearest future). The
concept of socio-cyberphysical systems adds one
more dimension – humans (drivers in this particular
example). Analyzing drivers’ needs, preferences and
intentions could significantly improve the situation
detection and situation development mechanisms.
Such systems can be classified as infomobile
driver support assuming distribution of dynamic and
selected multi-modal information to the users, both
pre-trip and, more importantly, on-trip (Ambrosino
et. al., 2010). It is a new way of service organization
appeared together with the development of personal
mobile and wearable devices capable to present user
multimodal information at any time. Recent
advances in car on-board infotainment systems make
it possible to organize infomobile driver support.
Configuration of socio-cyberphysical systems
belonging to the class of variable systems with
289
Smirnov A., Shilov N. and Gusikhin O..
Socio-cyberphysical System for Proactive Driver Support - Approach and Case Study.
DOI: 10.5220/0005540702890295
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 289-295
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

dynamic structures is a very complex task. Their
resources are too numerous, mobile with a
changeable composition. However, taking into
account not only combination of information from
cars, including speed, location, free parking spots,
directions (from the navigation system, etc.) but also
application of behavior analysis techniques for
predicting future (both short term [few seconds] and
long term [minutes-hours]) actions of drivers (some
drivers might prefer to park “next to the door” even
if it is expensive, others prefer to have a walk and
save on parking fee; some might be seeking for a
parking spot, others are about to leave, etc.) could
significantly improve the efficiency of parking
situation prediction and consequently improve it via
regulation of its controllable components.
In dynamic environments correct decisions can
only be made in the right context related to the
current situation (Smirnov, et al., 2010; Smirnov, et
al., 2005). Context is any information that can be
used to characterize the situation of an entity where
an entity is a person, place, or object that is
considered relevant to the interaction between a user
and an application, including the user and
applications themselves (Dey, et al., 2001). Thus,
context-driven decision support is required in
situations happening in dynamic, rapidly changing,
and often unpredictable distributed environments
such as roads.
The paper proposes an approach that has a
service-oriented architecture. The services are
integrated through service fusion, originating from
the concept of knowledge fusion, which implies a
synergistic use of knowledge from different sources
in order to obtain new information (Smirnov, et al.,
2003; Smirnov, et al., 2015). Thus, service fusion in
this work can be defined as synergistic use of
different services to have new driver support
possibilities not achievable via usage of the services
separately. Context-based service fusion can provide
a new, previously unavailable level of personalised
on-board information support via finding
compromise decisions taking into account proposals
of various services and driver preferences.
2 CASE STUDY SCENARIO
The following scenario can be considered as the
basis for the case study. A driver has a meeting
scheduled for 3pm. The navigation system leads the
driver to the meeting place. The driver’s profile has
information that the driver prefers free parking and
does not mind to have a walk for 200-300 meters.
Figure 1: Parking spot information sharing: the car doesn’t
fit into the free parking spot but it shares this information
so that other cars can use the spot.
Analysing the information about available parking
places nearby, as well about which parking spots
are currently free / will be free in few minutes, the
system proposes a parking spot to the driver.
The required information can be acquired from a
number of sources. Usually, there can be several
independent parking structures nearby with their on-
line services that provide availability (each parking
spot might have a sensor indicating if it is busy or
free), price, and wait time. The municipal street
parking can also provide a service with
corresponding parameters such as parking time limit
(e.g., 30 minutes or two hours, and the parking
enforced from 7:00 am till 19:00). There can also be
free street parking in vicinity. The availability of this
free parking may be provided by 3rd party service
that can provide a probability of finding a spot in the
given block at the given time. Alternatively, the
availability can be shared by other cars searching for
parking spots, leaving, or just passing by (Figure 1).
Free parking spots can be estimated via such
systems as Active Park Assist, which are already
available in the market. The parking facilities might
also have customer ratings stored in a social
network.
To lead the driver to the chosen parking spot the
system should be integrated with a navigation
service, which would calculate the route (e.g., going
through several possible parking spots) takin into
account the driver’s schedule and the context of the
current situation (traffic, weather conditions, etc.).
Such distributed system is reasonable to be
implemented based on the service-oriented
architecture. The developed approach to
configuration of a service-based socio-cyberphysical
network is presented in the next section. Section 4
addresses the issue of proactive driver support,
which is essential because the driver has very
limited possibilities to input requests and checking
all possible solutions. Such systems require behavior
analysis techniques described in section 5.
Searching
for a free
parking
spot
Found a free
parking spot 4.5 m
long at
[
coordinates
]
Smart space or
V2V
communication
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
290
A developed research prototype is presented in
section 6. Major results are summarized in the
conclusion.
3 PROPOSED APPROACH
The proposed approach to configuration of socio-
cyberphysical network assuming negotiation of
socio-inspired services. The approach is based on
the following principles: self-management and
responsibility of the services, and decentralization
with network organization (without any social
hierarchy of command and control) and co-operation
between services. This is motivated by the fact that
in order to operate efficiently, the system has to
model driver behavior (taking into account
preferences, earlier made decisions; see section 5),
what is achieved due to the usage of socio-inspired
services.
Self-organization of services is considered as a
threefold process of (i) cognition (where subjective
context-dependent knowledge is produced),
(ii) communication (where system-specific objecti-
fycation or subjectification of knowledge takes
place), and (iii) synergetical co-operation (where
objectified, emergent knowledge is produced). The
Individually acquired context-dependent (subjective)
knowledge is put to use efficiently by entering a
social co-ordination and co-operation process. The
objective knowledge is stored in structures and
enables time-space distanciation of social
relationships.
In order to achieve the realism and dynamics of
the self-organizing system, its components (services)
have to be creative, knowledgeable, active, and
social. The services that are parts of a system
permanently change their joint environment what
results in a synergetic collaboration and leads to
achieving a certain level of collective intelligence.
This is also supported by the fact that individual
service behavior is partially determined by the social
environment the services are contributing to (called
“norms”). For this purpose a protocol has been
developed based on the BarterCast approach
(Seuken, et al., 2014) that originates from the idea of
building a network by a service representing all
interactions it knows about.
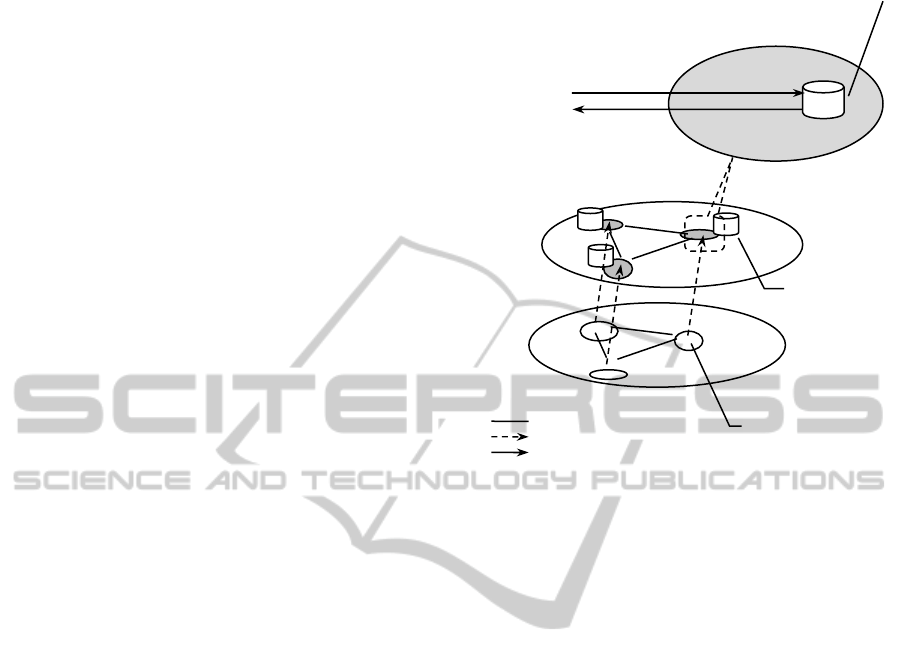
The overall scheme of the approach is shown in
Figure 2. The lower part of the figure represents the
socio-cyberphysical network and the corresponding
service network. The upper part represents the socio-
inspired service modelling behavior of a member of
the socio-cyberphysical network. The detailed
Figure 2: Socio-cyberphysical network configuration
approach overview.
description of the service is given in (Smirnov, et al.,
2013). The interoperability at the technological level
is provided via usage of common standards and
protocols, the interoperability at the level of
semantics is provided via usage of common
semantics and terminology described via ontologies
(please, see Smirnov, et al., 2007b for a detailed
description of the interoperability support).
4 PROACTIVE
RECOMMENDATIONS
Recommendation systems are widely used in the
Internet for suggesting products, activities (including
tourism), etc. for a single user considering his/her
interests and tastes (e.g., Garcia, et al., 2009). The
collaborative / group recommendation systems try to
find users who share similar interests with the given
user and recommend items they choose to that user
(Kumar and Thambidurai, 2010). Сontext-driven
collaborative algorithms of recommendation
generation increase the quality and speed of decision
making due to taking into account not only
previously made decisions but also on the contexts
of situations in which the decisions were made.
Modern recommendation systems mostly work
on the scheme “request-response”; the active party
Service
network
Service
Socio-
cyberphysical
network
Relationship
Correspondence
Information flow
Network membe
r
Profile
Environment
New knowledge,
norms, policies
Activity
Self-contextualization
Self-management
Subjective
(contextualized)
knowledge
Socio-cyberphysicalSystemforProactiveDriverSupport-ApproachandCaseStudy
291

in the interaction is the user, who makes a request,
which can contain some additional constraints for
the alternative solutions. As a response, the
recommendation system offers a list of
recommendations (recommended solutions). In on-
board recommendation systems, users cannot
browse through many search results and suffer from
other restrictions in the user experience, because of
user interface limitations such as small display sizes
or missing keyboards. In such environments, having
the user not to submit any request or query to get a
recommendation could possibly improve the user
experience (Bader, 2013; Woerdnl, et al., 2011).
At the moment, there are hardly any systems that
could offer recommendations in the proactive way,
without user request, on the basis of the current
situation and user profile analysis (Ricci, 2011). One
of the reasons of this situation is the high risk of
obtrusive offering non-relevant information to the
user. However, modern mobile devices equipped
with various sensors, make it possible to produce
proactive recommendations, which would be useful
and convenient due to creation of more precise user
behavior models.
Appearance of mobile devices caused a more
intensive development of proactive systems. The
next step in the development of proactive systems is
appearance of systems based on prediction of the
user behavior, his/her future locations or actions, as
well as situation recognition. Today, integration of
proactive systems with recommendation systems can
be considered as a perspective research field.
5 BEHAVIOR ANALYSIS
The developed approach assumes description of
functionality, preferences and strategies of the socio-
cyberphysical network members via updatable and
extendable profiles. Usage of the profiles makes it
possible to “individualize” the proactive
recommenddations. For this reason methods of
human preferences revealing have been developed.
The preferences are revealed via the analysis of
the situations the network member faces most often,
parameters of objects and actions most often
occurring or avoiding in the decisions (actions)
made by the network member, optimization criteria
the network member most often follows or not. One
of the main features of the developed profile model
is presence of the information related to antecedents
and consequences of the made decisions and under-
taken actions what makes it possible to perform the
functional analysis of the human behavior.
The functional behavior analysis is one of the
behavior analysis techniques considering frequency
of key behavior events related to certain human
activity (Kraus, 1995). It is also known as ABC
analysis (antecedent, behavior, consequence) and is
based on identification of both antecedents and
consequences of the behavior. As a result, it is
possible to build a conditional behavior model,
which would let one know (to predict) how a human
(e.g., a driver or a pedestrian) would act in a given
situation. For example, the research of application of
this technique to the driver behavior prediction has
resulted in some positive results (Taniguchi, et al.,
2012).
The result of such an analysis produces typical
decisions (actions) made by the considered person in
certain situations (behavior patterns). Example of
behavior pattern is presented below:
Context: the traffic is heavy; the traffic in the
lane in the left moves a bit faster; the driver is
hurrying.
Antecedent: there is a traffic congestion ahead
in the lane; the vehicle ahead slows down.
Possible behavior: stay in the lane and slow
down; switch to the left lane.
Preferred behavior: switch to the left lane.
Consequence: the vehicle moves faster than
vehicles in the congested lane, but slower than it
moved before; vehicles in the left lane behind
slow down.
The behavior pattern revealing techniques used
in the proposed approach include:
1. Revealing human behavior patterns for problems
with the same structure but different parameters.
In this case, the structural knowledge constituent
will be the same, and the parametric knowledge
constituent will be different.
2. Revealing human behavior patterns for different
problems solved by the same person. This
technique assumes analysis of structures of
different problems trying to find similarities
associated with the same decisions / actions.
3. Revealing human behavior patterns based on the
optimization criteria (problem parameters with
highest or lowest values) the person tends to
follow or avoid (e.g., the driver prefers moves
faster or with less maneuvers). Aggregated (e.g.,
weighted average) criteria can also be analyzed.
4. The above techniques applied not to one person
but to different persons with similar profiles.
This technique utilizes collaborative filtering
mechanisms (Schafer, et al., 2007).
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
292
To implement the first three techniques the
following methods have been developed:
1. Decision / action clustering method. The
decisions made by the person and actions
undertaken are grouped into clusters. Based on
the clusters built the common properties
(parameters) of the problems and decisions /
actions grouped into one cluster are identified.
The results of this method can be refined if there
is enough historical data accumulated and
clustering can be done taking into account the
context of the situation when corresponding
decisions have been made (including and
preferences of the person at the moment of
decision making as well as information about
behavior antecedents and consequences).
2. The alternative analysis method. Unlike the
previous method searching for similar person’s
decisions, this method is aimed at the analysis of
differences between decisions made by the
person and actions undertaken. Based on the
analysis of the identified differences taking into
account the situation context (as well as
preferences of the person and information about
behavior antecedents and consequences) namely
definition of the main generic differences of the
made decisions, the behavior patterns are
revealed.
To implement the fourth technique of human
behavior pattern revealing, a method based on the
collaborative filtering mechanisms used for building
collaborative recommendation systems. This
technique would enable to predict human behavior
even in situations, in which this person has never
got. For this reason, the decisions made by persons
with similar properties are used.
Application of the above techniques would
enable to generate proactive recommendations based
on prediction of behavior of real people (e.g., via
usage of opportunistic planning (Hayes-Roth, 1980)
mechanisms).
6 PROTOTYPE DESCRIPTION
The developed research prototype has a service-
oriented architecture based on the usage of the smart
space concept implemented in the Smart-M3
platform. The smart spaces technology (Balandin
and Waris, 2009; Korzun, et al., 2013) aims at the
seamless integration of different devices by
developing ubiquitous computing environments,
where different services can share information with
each other, perform computations, and interact with
each other for joint task solving. A detailed
description of the developed smart space-based
architecture can be found in (Smirnov, et al., 2014b).
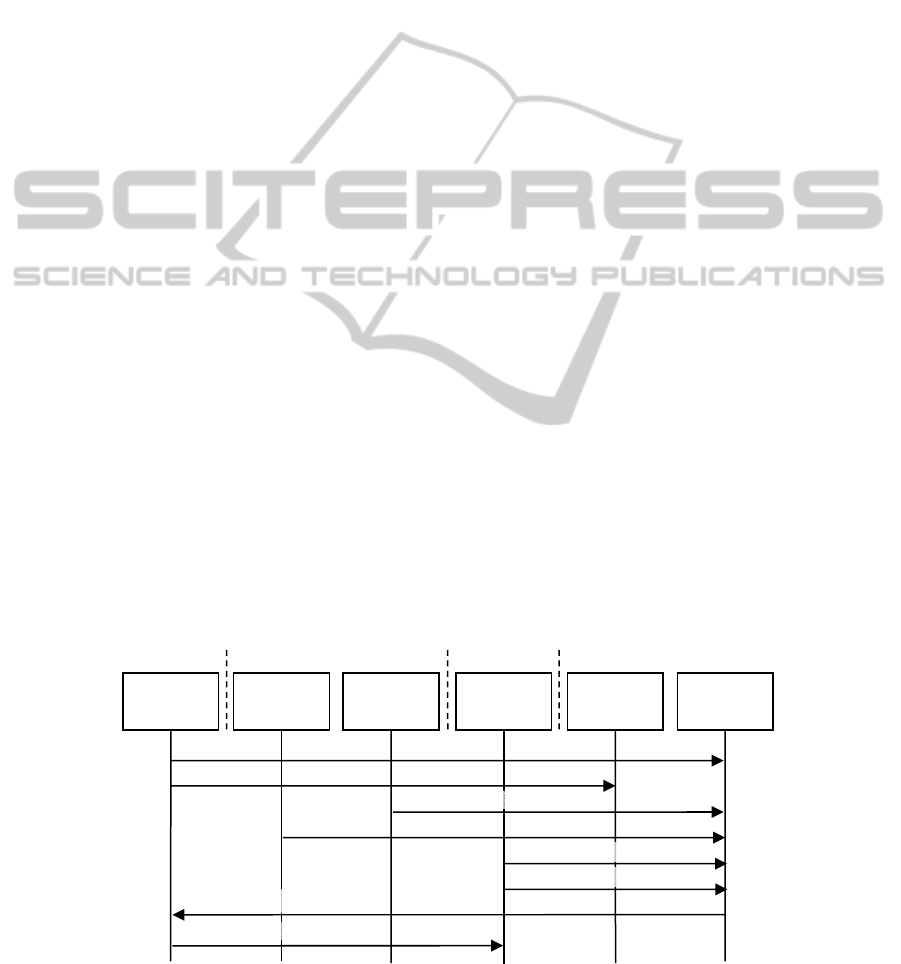
The interaction between services is presented in
Figure 3. It is based on usage of AppLink for
interaction with the vehicle. In addition to the
information already stored in the services
(associated databases, user settings, revealed
preferences, etc.), they acquire the following
information from other services, namely:
Local road infrastructure provides information
about parking places, their restrictions and
prices.
Nearby cars share information, which parking
spots are currently free and occupied, will be free
if the car is about to leave, are about to be
occupied if the corresponding driver is going to
park at the selected spot.
Figure 3: Service interaction example.
AppLink SmartPhone Driver profile
Road
infrastructure
GPS, route
Schedule
Parking locations
Recommended parking spot
Car Driver Cloud
Recommendat
ion Service
Other cars
On-board
information
system
Free parking spots, intentions
GPS, route
Free
p
arkin
g
s
p
ots, intentions
Preferences, intentions
Socio-cyberphysicalSystemforProactiveDriverSupport-ApproachandCaseStudy
293

Figure 4: Example of In-vehicle information support implemented in AppLink emulator.
Weather acquisition service provides information
about the current and forecasted weather
conditions.
Recommendation service obtains driver’s
schedule from his/her smartphone to estimate
current time restrictions, predefined driver
preferences and information obtained from the
above mentioned sources.
The generated solutions are transferred to the
AppLink screen so that the driver could choose the
most appropriate one, and to the in-car navigation
system (Figure 4). If parking can be paid online, the
payment can be done automatically, when the driver
is parking.
7 CONCLUSIONS
The paper presents a developed approach and
enabling technologies for implementation of an
intelligent driver support system that takes
advantages provided by such modern developing
technologies as context-based collaborative
recommendation systems, proactive information
support, smart space, and V2V communication. The
developed concept is illustrated via a parking
assistance scenario.
The work is at an early stage of development.
The paper proposes generic solutions for the key
problems that may arise during the implementation
of the proposed system. Particular methods and
models supporting these solutions are subjects of the
future research.
ACKNOWLEDGEMENTS
The research was partially supported by projects
funded by grants # 15-07-08092, # 15-07-08391,
# 13-07-00271, # 13-07-12095, # 14-07-00345 and
of the Russian Foundation for Basic Research,
project 213 (program 8) of the Presidium of the
Russian Academy of Sciences, and project # 2.2 of
the basic research program “Intelligent information
technologies, system analysis and automation” of the
Nanotechnology and Information technology
Department of the Russian Academy of Sciences.
This work was also partially financially supported
by Government of Russian Federation, Grant 074-
U01.
REFERENCES
Ambrosino, G., Nelson, J. D., Bastogi, B., Viti, A.,
Romazzotti, D., Ercoli, E., 2010. The Role and
Perspectives of the Large-Scale Flexible Transport
Agency in the Management of Public Transport in
Urban Areas. In: Ambrosino, G., Boero, M., Nelson, J.
D., Romanazzo, M. (Eds), Infomobility Systems and
Sustainable Transport Services, ENEA, 156-165.
(2010).
Bader, R., 2013. Proactive Recommender Systems in
Automotive Scenarios. PhD Theses. Technische
Universitat Munchen, Fakultat fur Informatik
Lehrstuhl fur angewandte Informatik / Kooperative
Systeme.
Balandin, S., Waris, H., 2009. Key Properties in the
Development of Smart Spaces. In Proc. of the 5th Int’l
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
294

Conf. Universal Access in Human-Computer
Interaction, Springer-Verlag, 3-12.
Dey, A. K., Salber, D., Abowd, G. D., 2001. A Conceptual
Framework and a Toolkit for Supporting the Rapid
Prototyping of Context-Aware Applications. Context-
Aware Computing, A Special Triple Issue of Human-
Computer Interaction, 16, 229-241.
Garcia, I., Sebastia, L., Onaindia, E., Guzman, C., 2009. A
Group Recommender System for Tourist Activities.
EC-Web 2009: Proceedings of E-Commerce and Web
Technologies, The 10th International Conference
(2009), LNCS, Springer, 5692, 26-37.
Hayes-Roth, B., 1980. Human Planning Processes.
Scientific Report (1980),
http://www.rand.org/content/dam/rand/pubs/reports/20
07/R2670.pdf.
Korzun, D., Balandin, S., Gurtov, A., 2013. Deployment
of Smart Spaces in Internet of Things: Overview of the
Design Challenges. Internet of Things, Smart Spaces,
and Next Generation Networking, Springer, LNCS,
8121, 48-59.
Kraus, S. J.: Attitudes and the Prediction of Behavior: A
Meta-Analysis of the Empirical Literature. Personality
and Social Psychology Bulletin, 21(1), 58-75.
Kumar, A., Thambidurai, P., 2010. Collaborative Web
Recommendation Systems Based on an Effective
Fuzzy Association Rule Mining Algorithm (FARM).
Indian Journal of Computer Science and Engineering,
Engg Journals Publications, 1(3), 184-191.
Ricci, F., 2011. Mobile Recommender Systems. J. of IT &
Tourism, 1, 205-231.
Schafer, J. B., Frankowski, D., Herlocker, J., Sen, S.,
2007. Collaborative Filtering Recommender Systems.
The Adaptive Web, Springer Berlin Heidelberg, 291-
324.
Seuken, S., Meulpolder, M., Parkes, D. C., Pouwelse, J.
A., Tang, J., Epema, D. H. J., 2014. Work Accounting
Mechanisms: Theory and Practice. Working Paper.
Department of Informatics, University of Zurich.
Sheth, A. P., Anantharam, P., Henson, C. A., 2013.
Physical-Cyber-Social Computing: An Early 21st
Century Approach. IEEE Intell. Syst., 28(1), 78-82.
Smirnov A., Pashkin M., Chilov N., Levashova T., 2003.
KSNet-Approach to Knowledge Fusion from
Distributed Sources. Computing and Informatics. 22,
105-142.
Smirnov, A., Pashkin, M., Levashova, T., Chilov, N.,
2005. Fusion-Based Knowledge Logistics for
Intelligent Decision Support in Network-Centric
Environment. In Klir, G. J. (Ed.) International Journal
of General Systems, Taylor & Francis, 34(6), 673-690.
Smirnov, A., Shilov, N., Levashova, T., Sheremetov, L.,
Contreras, M., 2007. Ontology-Driven Intelligent
Service for Configuration Support in Networked
Organizations. Knowledge and Information Systems.
Special Issue on Current Challenges and Trends in
Intelligent Computing and Knowledge Management in
Industry, Springer London, 12(2), 229-253.
Smirnov A., Levashova T., Shilov N., Kashevnik A.,
2010. Hybrid Technology for Self-Organization of
Resources of Pervasive Environment for Operational
Decision Support.
International Journal on Artificial
Intelligence Tools, World Scientific Publishing
Company, 19(2), 211-229.
Smirnov, A., Kashevnik, A., Shilov, N., Makklya, A.,
Gusikhin, O., 2013. Context-Aware Service
Composition in Cyber Physical Human System for
Transportation Safety. Proceedings of the 13
th
International Conference on ITS Telecommunications
(ITST2013), IEEE, 139-144.
Smirnov, A., Kashevnik, A., Shilov, N., Gusikhin, O.,
2014. Context-Driven On-Board Information Support:
Smart Space-Based Architecture. The 6
th
International
Congress on Ultra Modern Telecommunications and
Control Systems (ICUMT 2014), IEEE, 195-200.
Smirnov, A., Levashova, T., Shilov, N., 2015. Patterns for
Context-Based Knowledge Fusion in Decision
Support. Information Fusion, 21(1), 114-129.
Taniguchi, T., Nagasaka, S., Hitomi, K., Chandrasiri, N.
P., Bando, T., 2012. Semiotic Prediction of Driving
Behavior Using Unsupervised Double Articulation
Analyzer. Intelligent Vehicles Symposium (IV), IEEE,
849-854.
Teslya, N., Smirnov, A., Levashova, T., Shilov, N., 2014.
Ontology for Resource Self-Organisation in Cyber-
Physical-Social Systems. Klinov, P., Mouromtsev, D.
(eds.) 5
th
International Conference of Knowledge
Engineering and the Semantic Web (KESW 2014),
CCIS, Springer International Publishing Switzerland,
468, 184-195.
Woerdnl, W., Huebner, J., Bader, R., Gallego-Vico, D.,
2011. A Model for Proactivity in Mobile, Context-
Aware Recommender Systems. Proceedings of the
fifth ACM conference on Recommender systems, 273-
276.
Socio-cyberphysicalSystemforProactiveDriverSupport-ApproachandCaseStudy
295
