
Traffic Signs Detection and Tracking using Modified Hough
Transform
Pavel Yakimov
1,2
and Vladimir Fursov
1,2
1
Samara State Aerospace University, 34 Moskovskoye Shosse, Samara, Russia
2
Image Processing Systems Institute of Russian Academy of Sciences, 151 Molodogvardeyskaya Street, Samara, Russia
Keywords: Traffic Signs Recognition, Advanced Driver Assistance Systems, Graphics Processing Units, Image
Processing, Pattern Recognition.
Abstract: Traffic Signs Recognition (TSR) systems can not only improve safety, compensating for possible human
carelessness, but also reduce tiredness, helping drivers keep an eye on the surrounding traffic conditions. This
paper proposes an efficient algorithm for real-time TSR. The article considers the practicability of using HSV
color space to extract the red color. An algorithm to remove noise to improve the accuracy and speed of
detection was developed. A modified Generalized Hough transform is then used to detect traffic signs. The
current velocity of a vehicle is then used to predict the sign’s location in the adjacent frames in a video
sequence. Finally, the detected objects are being classified. The developed algorithms have been tested using
real scene images and the German Traffic Sign Detection Benchmark (GTSDB) dataset and showed efficient
results.
1 INTRODUCTION
Traffic Sign Recognition system is designed to
provide a driver with relevant information about road
conditions. There are several similar systems: 'Opel
Eye' of Opel, 'Speed Limit Assist' from the company
Mercedes-Benz, 'Traffic Sign Recognition', Ford and
others. Most of them are aimed at the detection and
recognition of road signs limiting the velocity of
movement (Shneier, 2005).
Traffic signs recognition is typically executed in
two steps: sign detection and subsequent recognition.
There are many different methods of detection:
(Nikonorov et al., 2013), (Ruta et al., 2009),
(Belaroussi et al., 2010). Most of them use a single
frame from a video sequence to detect an object. This
means they do not use the additional information
about the presence of the sign in the adjacent frames.
Such approaches usually have problems of operation
in real time and with detection accuracy. On the other
hand, several papers describe tracking algorithms,
which try to predict the location of signs in a sequence
images. In paper (Lafuente-Arroyo et al., 2006), the
authors show that the integration of the detection and
tracking improves the reliability of the whole system
due to the decrease of false detections. In (Lopez and
Fuentos, 2007), it is shown that tracking helps to
make the detection faster. However, the described
algorithms still have significant computational
complexity and cannot be used in real time.
This paper describes a detection algorithm that
uses the velocity obtained from the vehicle in real
time. It allows predicting not only the presence of an
object but also the scale and location. Thus, the
accuracy will be better, while the computational
complexity almost will not change.
In order to give a driver proper information about
a traffic sign, the system needs to classify the found
object. In fact, the recognition of a small size object
does not cause any difficulties in the presence of the
samples or patterns of possible traffic signs. In case
of a proper detection procedure, the recognition step
has accurate sign coordinates and scale. Therefore,
this paper only describes a simple template matching
algorithm, which shows good results combined with
the detection step.
The performance of existing portable computers
is not always enough for the real time detection of
traffic signs. Many detection algorithms are based on
Hough transform that allows you to effectively detect
parameterized curves in an image, but this algorithm
is very sensitive to the quality of digital images,
especially in the presence of noise. The more noise in
the image, the longer it will take to detect objects.
Thus, the possibility of detecting traffic signs in real
22
Yakimov P. and Fursov V..
Traffic Signs Detection and Tracking using Modified Hough Transform.
DOI: 10.5220/0005543200220028
In Proceedings of the 12th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2015), pages 22-28
ISBN: 978-989-758-118-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
time strongly depends on the quality of the image
preparation.
This paper describes the whole technology of
traffic sign detection with tracking and recognition.
The section with experimental results shows
processed real scene images.
2 TRAFFIC SIGNS
RECOGNITION SYSTEM
Figure 1 shows a road scene model used to design the
algorithms of detection and recognition. Here, α is the
camera angle in the horizontal projection; W is the
width of a road sign image; AC is the distance from
the car to the sign. Image width is the width of the
input image in pixels. In our case, the width of the
frame is equal to the width of FullHD, i.e. 1980
pixels.
Figure 1: Road scene model.
This paper considers a whole traffic signs
recognition technology with three steps: image
preparation, detection and recognition. The detection
is based on the color information extracted from
images. Therefore, the image preparation starts with
color thresholding and denoising. Then, a
modification of Generalized Hough Transform is
used to localize signs in images. A tracking procedure
based on the vehicle’s velocity is performed to verify
a sign presence. Finally, the detected region is being
classified.
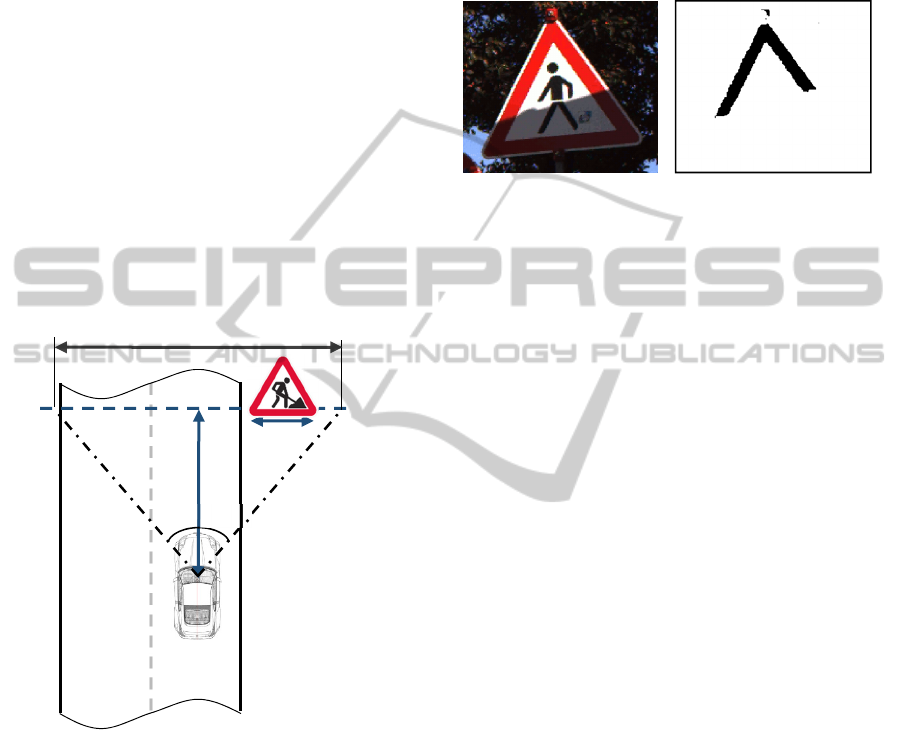
2.1 Color Analysis and Denoising
Some specific light conditions significantly affect the
ability of correct perception of the color in a scene.
When taking the actual traffic situation, there are a
number of different lighting conditions on the signs.
Figure 2: Example of color extraction in RGB.
The signs detection process becomes much more
complicated due to such effects as direct sunlight,
reflected light, shadows, the light of car headlights at
night. Moreover, the various distorting effects may
occur on one road sign at the same time (Figure 2).
Thus, it is not always possible to identify an area
of interest in the real images by simply applying a
color threshold filter directly in the RGB (Red, Green
and Blue) color space. Figure 2 shows an example of
applying a threshold filter to the red color channel.
To extract the red color from the input image it is
necessary to use the color information of each pixel,
regardless of uncontrolled light conditions. For this
purpose, the color space HSV (Hue, Saturation and
Value) was selected.
Most digital sensors obtain input images in the
format of RGB. Conversion to HSV color space is
widely described in (Koschan and Abidi, 2008).
Between the three components of H, S and V there
are certain dependencies. H component will not
matter if the S or V components are represented by
values that are close to zero. The display color will be
black if V is equal to 0. Pure white color is obtained
when V = 1 and S = 0.
The ideal red (R = 255, G = 0, B = 0) in the HSV
color space is defined by the following values
0.0 , 1, 1HSV=°= =
. The experimental method was
used to determine the optimal threshold values to
extract the red color of traffic signs in the space of
HSV:
(0.0 23 ) (350 360 )HH°≤ < ° ∨ °< < °
(1)
0.85 1S<≤
(2)
0.85 1V<≤
(3)
α
W
C
A
B
I
ma
g
e width
TrafficSignsDetectionandTrackingusingModifiedHoughTransform
23
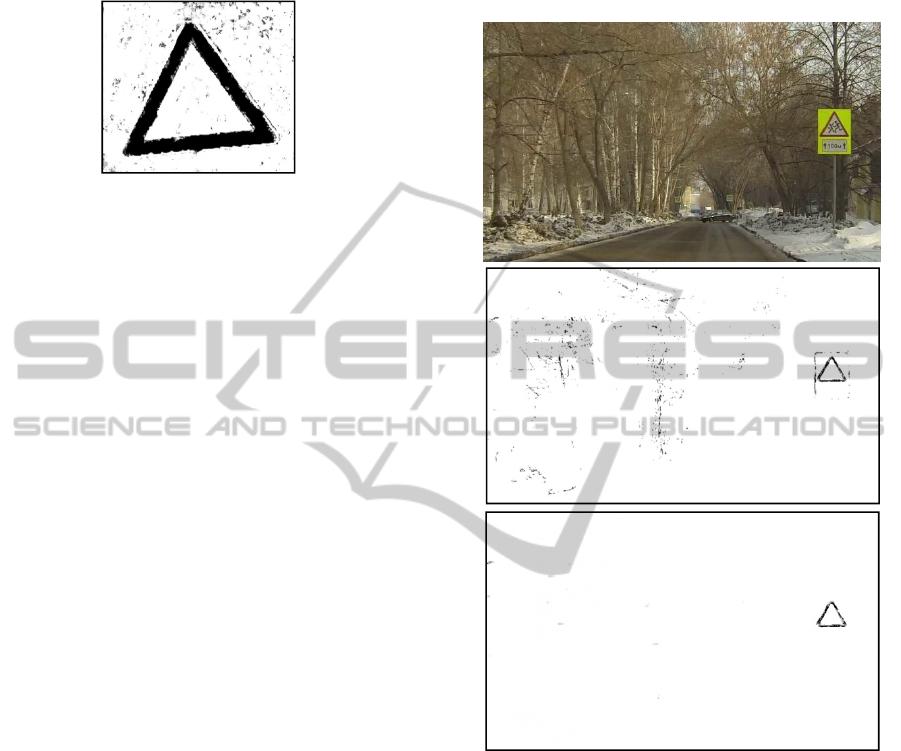
Figure 3 shows the result of image processing of
the road sign from Figure 2 with threshold values (1)-
(3) in HSV.
Figure 3: Threshold color filtering in HSV.
The binary image obtained using thresholding
satisfies the conditions of many algorithms of traffic
signs detection. However, one can easily notice the
presence of noise in the image. The picture in Figure
3 is well prepared for further processing, but the
situation with the frames captured from a real video
sequence is completely different.
The image in Figure 2 was obtained by a camera
with high resolution (8.9 megapixels), and shooting
conditions were significantly better than when using
a built-in car video sensor. Figure 4 shows a fragment
of a frame from the video sequence obtained during
the experiments containing a road sign.
Noise in the Figure 4b appears after thresholding
to extract the red color. It not only reduces the
performance of the system, but also affects the quality
of detection. This can lead to false detection of road
signs.
In order to avoid this point-like noise, a modified
algorithm based on the results obtained in paper
(Yakimov, 2013) was applied. This article describes
the denoising algorithm based on the detection and
retouching of point-like glares on the reproductions
of works of art. In order to detect these glares the
sliding windows algorithm was used. The main
advantage of such algorithm is that the parameters
can be set in such way that only point-like noise will
be removed. At the same time, parts of images of
signs stay unfiltered in the processed frames. The
result of processing the image from Figure 4b is
shown in Figure 4c.
Paper (Fursov et al., 2013) shows the effective
implementation of the denoising algorithm in the
massively multi-threaded environment CUDA.
CUDA is a parallel computing platform and
programming model provided by NVidia. It enables
dramatic increases in computing performance by
harnessing the power of the graphics processing unit
(GPU). The resulting acceleration on the GPU
relative to the CPU reached 60-80 times. Frame size
in the video sequence is 1920x1080 pixels. Image
processing execution time on the CPU is 0.7-1 sec.
Using CUDA on NVIDIA GeForce 335m has
reduced the execution time to 7-10 ms, which satisfies
the requirement of processing video in real time.
(a)
(b)
(c)
Figure 4: (a) A frame from video sequence; (b) Binary
image with extracted red; (c) Result of image denoising.
2.2 Detection and Tracking
2.2.1 Modified Hough Transform
Detecting traffic signs is implemented using a
modification of Generalized Hough transform (GHT)
(Ruta et al., 2008). Implementing classic GHT in Full
HD 1080p images leads to enormous execution time.
One of the main objectives of the TSR system is to
operate in real time. Therefore, there are maximum 50
milliseconds for processing one frame on the
detection step.
Many TSR systems are designed to detect only
circular signs. There is no difficulty to detect circles
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
24

using an implementation of Hough transform, and
using CUDA makes it possible to implement it in real
time. All processing takes no more than 40 ms
including steps of color extraction, denoising,
detection and recognition. Other systems use various
machine-learning techniques such as Viola-Jones
(Møgelmose et al., 2012) or Support Vector Machine
(Lafuente-Arroyo et al., 2010), which do not always
suit the execution time limitation.
In this paper, we consider detection and
recognition of triangular signs in real time. The main
difference from the original GHT is in using some
other accumulator space (Figure 5b) and avoiding the
R-table construction. After applying a special
triangular template to the binary image in Figure 4c,
the point with the maximum value in Figure 5b is the
central point of the sought-for object. The case shown
in Figure 5 is for equal scales of a template object and
object in the real scene. The colors in the pictures are
inverted in comparison to the images used in the
algorithm.
(a) (b)
Figure 5: (a) An example of a triangular sign after color
extraction; (b) Accumulator space after implementing the
developed algorithm.
In case of different scales, we receive some more
extremum points in the accumulator, three points
when implementing the algorithm using a triangular
template (Figure 6).
(a) (b)
Figure 6: The accumulator space in case of
(a) template is smaller than the object in real scene;
(b) template is bigger than the object in real scene.
Assuming that the size of a sign is up to 150
pixels, we have found that the distance between two
of these points is up to 20 pixels. A sign with 150
pixels of width means that it is located in 3.5 meters
from the camera. There is no opportunity and no need
to detect a closer sign, because it moves out from the
view of a camera with α equal to 70 ° (Figure 1). It
allows computing the difference in scales of the
template and an object in real scene. Using this value,
we can precisely define the area of sign and then pass
it to the recognition step. The middle location of these
bright points in the accumulator is the coordinates of
an object’s center.
This paper shows the detection procedure of
triangular traffic signs only. However, the described
algorithm can also be used to detect rectangular and
circular objects in images, thus covering almost all of
the traffic sign classes. The main difference is the
template images used for detection.
2.2.2 Tracking with Prediction
The above-described traffic sign detection algorithm
is designed to localize objects in each two-
dimensional frame of a video sequence. However,
some researchers propose to use additional
information to increase the reliability of traffic sign
recognition. For example, in the article (Timofte et
al., 2014), the authors propose to combine data
obtained with a usual camera and three-dimensional
scene obtained with lidar.
In this paper, we assume that a vehicle is equipped
with only one FullHD camera. In this case, we can
only use two-dimensional consecutive frames of a
video sequence. The use of adjacent frames is
described in articles (Guo et al., 2012) and
(Mogelmose et al., 2012). Tracking traffic sign on
adjacent frames can not only increase the confidence
in the correct detection, but also reduce the
computational complexity of the algorithm by
reducing the search area in the adjacent frames.
In this article, tracking of traffic signs in a video
sequence is performed using the information on the
current vehicle speed. Most modern cars are equipped
with onboard computers or GPS receivers, which can
return the current vehicle speed V. In addition, we
know the number of received frames per second FPS.
Thus, we can get the exact difference of the distance
to the sign in adjacent frames:
V
AC
FPS
Δ=
.
(4)
Consider the case of detecting a triangular traffic
sign shown in Figure 5, using the model of the road
scene shown in Figure 1. The distance from the
vehicle to the sign can be obtained using the
following equation:
TrafficSignsDetectionandTrackingusingModifiedHoughTransform
25

2
tan
2
p
m
p
F
rameWidth
SignWidth
AC
SignWidth
×
=
×
α
(5)
Here, index
m
means that a value is in meters,
index
p
means a value in pixels.
The actual size of the road signs is known and in
our case is 0.7 m. We assume that the sign width in
pixels is equal to 31 pixels as this size is quite suitable
for the subsequent recognition step. α is equal to 70 °.
In this case, the distance AC is equal to 30 m.
Using the difference (4) and the distance (5), we
can calculate the exact size of the sign on the adjacent
frames:
'
p
p
A
C SignWidth
SignWidth
AC AC
×
=
+Δ
(6)
Thus, the detection with tracking uses vehicle
speed to predict the sizes of a detected traffic sign in
the adjacent frames. This significantly increases the
reliability of the correct detection and at the same
time reduces the required time for detection.
2.3 Recognition
For the recognition step, the algorithm uses the
specially prepared binary etalon images, which are
actually inner areas of traffic signs. Figure 7 shows
such etalons.
Figure 7: Etalon images for template matching.
After detection, the algorithm obtains images of
detected objects, which are quite similar to etalons
since they are previously resized to the constant size
of etalon images. To determine the type of a found
object, we can use any recognition method. However,
in case of successful object detection, and due to the
execution time limitation, it is expedient to use a
simple image subtraction and choose the lowest
value, which will point to the most similar etalon. In
case of large values, the algorithm gives a false
detection message, since no similar etalon images
were found.
The execution time of such recognition is 1-2 ms
in average with 32 types of image etalons. This
performance allows using several etalon images of
each type to increase the recognition efficiency and
reliability.
3 EXPERIMENTAL RESULTS
The developed algorithm was tested on the video
frames obtained on the streets of the city of Samara
using a camera GoPro Hero 3 Black Edition built in
to a car.
Figure 8 shows the fragments of the original
images with marked road signs on them.
Figure 9 shows the result image of the detection
algorithm without the prior application of the noise
reduction algorithm. It shows a case of false
detection. In this noisy image, the accumulator space
collected more votes for noisy part of the image than
for road sign is in the shade.
Figure 8: Frames with detected signs.
Figure 9: False detection.
Note that it took 80 ms to apply the detection
algorithm on the noisy image. While it took almost
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
26

half as much time (41 ms) to process the denoised
image.
In order to evaluate the detection and recognition
algorithms accuracy, we used the German Traffic
Sign Detection Benchmark (GTSDB) (Houben et al.,
2013) and the German Traffic Sign Recognition
Benchmark (GTSRB) (Stallkamp et al., 2012). They
contain more than 50,000 images with traffic signs
registered in various conditions. To assess the quality
of the sign detection, we counted number of images
with correctly recognized traffic signs. When testing
the developed algorithms, we used only 9,987 images
containing traffic signs of the required shape and with
red contours. The experiments showed 97,3% of
correctly detected and recognized prohibitory and
danger traffic signs.
The remaining 2.7% of traffic signs were rejected
on the recognition step with the message “There is no
sign in the detected region”. When lowing the
thresholds of recognition, we can increase the
accuracy of the whole procedure. Still, it is much
more important to avoid false detection cases in real
situation than to miss some traffic signs.
While several teams-participants of both
benchmarks reached 100% of detection and
recognition accuracy, they did not provide any
information about the algorithms performance. In this
article, we describe the implementation that can
operate in real time using hardware of limited power
consumption and comparatively low performance.
Table 1 shows the execution time of the proposed
traffic signs detection and recognition algorithms.
CPU results were obtained using Intel Core i5 3210m;
GPU results were obtained using CUDA-enabled
NVIDIA GeForce GT 750m.
Table 1: Traffic signs detection and recognition algorithms
performance.
Time FPS
CPU, 1920x1080 283 ms 3.53
CPU, 1280x720 142 ms 7.04
GPU, 1920x1080 23 ms 43.47
GPU, 1280x720 14 ms 71.42
Figure 10 shows some examples of detected
traffic signs in the images from the German Traffic
Sign Detection Benchmark dataset. The detected
objects are marked with green rectangles.
In Figure 11, there are examples of detected and
recognized traffic signs from the German Traffic Sign
Recognition Benchmark dataset. Despite the bad
registration quality of some images, most of the
detected objects are recognized correctly, because the
coordinates of the inner area of a traffic sign are
detected quite precisely.
Figure 10: Traffic signs detection in images from the
GTSDB dataset.
Figure 11: Successfully recognized traffic signs from the
GTSRB dataset.
In future research, we plan to create a new traffic
sign detection and recognition dataset with annotated
videos instead of images, like in GTSDB and
GTSRB.
4 CONCLUSIONS
This paper proposes a whole technology for traffic
signs recognition, including image preprocessing,
detecting with tracking, and recognition of traffic
signs. The HSV color model was approved as the
most suitable one for the extraction of red color in the
images. The modified algorithm for removing noise
TrafficSignsDetectionandTrackingusingModifiedHoughTransform
27

helped not only to avoid false detection of signs, but
also accelerated the processing of images. The
developed algorithm can improve the quality and
increase the reliability of automotive traffic sign
recognition systems, and reduce the time required to
process one frame, which brings the possibility to
carry out the detection and recognition of signs in Full
HD 1920x1080 images from the video sequence in
real time.
An algorithm for detection of triangular signs is
considered in the paper. It is based on the Generalized
Hough Transform and is optimized to suit the time
limitation. The developed algorithm shows efficient
results and works well with the preprocessed images.
Tracking using a vehicle’s current velocity helped to
improve the performance. In addition, the presence of
a sign in a sequence of adjacent frames in predicted
areas dramatically improves the confidence in correct
detection. Recognition of detected signs makes sure
that the whole procedure of TSR is successful.
In this paper, we consider triangular traffic signs.
The developed detection algorithm makes it possible
to detect signs of any shape. It is only needed to
replace the template image with a sought-for shape.
The use of our TSR algorithms allows processing
of video streams in real-time with high resolution, and
therefore at greater distances and with better quality
than similar TSR systems have.
CUDA was used to accelerate the performance of
the described methods. In future research, we plan to
move all the designed algorithms to the mobile
processor Nvidia Tegra X1.
ACKNOWLEDGEMENTS
This work was partially supported by Project
#RFMEFI57514X0083 by the Ministry of Education
and Science of the Russian Federation.
REFERENCES
Shneier, M., 2005. Road sign detection and recognition.
Proc. IEEE Computer Society Int. Conf. on Computer
Vision and Pattern Recognition, pp. 215–222.
Nikonorov, A., Yakimov, P., Petrov, M., 2013. Traffic sign
detection on GPU using color shape regular
expressions. VISIGRAPP IMTA-4, Paper Nr 8.
Ruta, A., Porikli, F., Li, Y., Watanabe, S., Kage, H., Sumi,
K., 2009. A New Approach for In-Vehicle Camea
Traffic Sign Detection and Recognition. IAPR
Conference on Machine vision Applications (MVA),
Session 15: Machine Vision for Transportation.
Belaroussi, R., Foucher, P., Tarel, J. P., Soheilian, B.,
Charbonnier, P., Paparoditis, N., 2010. Road Sign
Detection in Images. A Case Study, 20th International
Conference on Pattern Recognition (ICPR), pp. 484-
488.
Lafuente-Arroyo, S., Maldonado-Bascon, S., Gil-Jimenez,
P., Gomez-Moreno, H., Lopez-Ferreras, F., 2006. Road
sign tracking with a predictive filter solution. IEEE
Industrial Electronics, IECON 2006 - 32nd Annual
Conference on, vol., no., pp.3314-3319.
Lopez, L.D. and Fuentes, O., 2007. Color-based road sign
detection and tracking. Image Analysis and Recogni-
tion, Lecture Notes in Computer Science. Springer.
Koschan, A., Abidi, M. A., 2008. Digital Color Image
Processing. ISBN 978-0-470-14708-5, p. 376.
Yakimov, P., 2013. Preprocessing of digital images in
systems of location and recognition of road signs.
Computer optics, vol. 37 (3), pp. 401-405.
Fursov, V.A., Bibikov, S.A., Yakimov, P.Y., 2013.
Localization of objects contours with different scales in
images using Hough transform. Computer optics. Vol.
37(4), pp. 496-502.
Ruta, A., Li, Y., Liu, X., 2008. Detection, Tracking and
Recognition of Traffic Signs from Video Input.
Proceedings of the 11th International IEEE Conference
on Intelligent Transportation Systems. Beijing, China.
Møgelmose, A., Trivedi, M., Moeslund, M., 2012. Learning
to Detect Traffic Signs: ComparativeEvaluation of
Synthetic and Real-World Datasets. 21st International
Conference on Pattern Recognition, pp. 3452-3455,
IEEE.
Lafuente-Arroyo, S., Salcedo-Sanz, S., Maldonado-
Basc´on, S., Portilla-Figueras, J. A., Lopez-Sastre, R. J.
2010. A decision support system for the automatic
management of keep-clear signs based on support
vector machines and geographic information systems.
Expert Syst. Appl., vol. 37, pp. 767–773.
Timofte, R., Zimmermann, K.,Van Gool, L., 2014. Multi-
view traffic sign detection, recognition, and 3D
localisation. Machine Vision and Applications, vol. 25,
pp. 633-647, Springer Berlin Heidelberg.
Guo, C., Mita, S., McAllester, D., 2012. Robust Road
Detection and Tracking in Challenging Scenarios
Based on Markov Random Fields With Unsupervised
Learning. Intelligent Transportation Systems, IEEE
Transactions on, vol.13, no.3, pp.1338-1354.
Mogelmose, A., Trivedi, M.M., Moeslund, T.B., 2012.
Vision-Based Traffic Sign Detection and Analysis for
Intelligent Driver Assistance Systems: Perspectives and
Survey. Intelligent Transportation Systems, IEEE
Transactions on, vol.13, no.4, pp.1484-1497.
Houben, S., Stallkamp, J., Salmen, J., Schlipsing, M., Igel,
C., 2013. Detection of Traffic Signs in Real-World
Images: The {G}erman {T}raffic {S}ign {D}etection
{B}enchmark. International Joint Conference on
Neural Networks.
Stallkamp J., Schlipsing M., Salmen J., Igel C., 2012. Man
vs. computer: Benchmarking machine learning
algorithms for traffic sign recognition. Neural
networks, vol. 32, pp. 323-332.
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
28
