
Stabilizing Global Temperature Through a Fuzzy Control on CO
2
Emissions
Carlos Gay-Garcia
1,2
and Bernardo Bastien-Olvera
1
1
Climate Change Research Program, National University of Mexico, Mexico City, Mexico
2
Centre for Atmospheric Science, National University of Mexico, Mexico City, Mexico
Keywords:
Climate Change, Global Temperature, Carbon Emissions, Fuzzy Control.
Abstract:
In this research, we generated a fuzzy control of carbon emissions that acts increasing or decreasing the
representative concentration pathway emissions proposed by the IPCC, in order to obtain a CO
2
path that
would stabilize the global average surface temperature to a desired level. We used a simple linear climate
model that is driven primary by the Carbon emissions. We made simulations under the four RCPs activating
the control at different times, which give us a broad knowledge on when is possible to stabilize the temperature,
based in the current emissions path. We conclude that taking action earlier (via fuzzy control) will lead not
only to reach stabilization, but also, in some cases, to have economic growth allowing to increase emissions
at some points in time. Activating the control very late will initiate an oscillation on temperature which will
include not only a reduction of emissions but also a necessary anthropogenic net carbon sequestration. This
instrument is a common ground where specialists in diverse areas of climate change could contribute in order
to set the parameters that we should explore and simulate so that the we can make the best decisions.
1 INTRODUCTION
The most important Climate Change indicator and
driver is the global average surface temperature which
had already risen by about 0.7
◦
C from pre-industrial
levels. In the United Nations Framework Convention
on Climate Change, COP16, the parties agreed that
the future global warming relative change should be
limited to below 2.0
◦
C (King, 2011).
Since the Cancun agreements, more scientific
analysis had been done in order to estimate the chance
to constrain the warming, according to Rogelj et al.
(2009) the national emissions targets of developed
countries would need to be adjusted in order to ac-
complish the agreement.
It is very important to identify the windows
of opportunity for action where mitigation cost is
less, Parry and colleagues assumed different emission
peaks and the correspondent percentage of cuts that
would need to be made in order to avoid the most se-
rious global impacts (Parry et al., 2008).
This work is an improved version of a fuzzy con-
trol of emissions that computes the amount of Gt of
CO
2
increment or decrement that would need to be
made in order to stabilize the temperature to a de-
sired level, using an inference system that evaluates
the closeness of the actual temperature to the target
temperature (Martinez-Lopez and Gay-Garcia, 2011).
Fuzzy controllers had been largely used to achieve
system’s goals in uncertain environments such as
transportation, manufacturing and networked embed-
ded systems (Tong, 1977), furthermore, fuzzy con-
trollers had been implemented to stabilize the climate
on greenhouses (Javadikia et al., 2009), which help
us to sustain our effort of extrapolation to the global
temperature.
2 TEMPERATURE SIMULATION
We used the simple climate model that Tahvonen and
colleagues proposed (Tahvonen et al., 1994) where
the change in atmospheric Carbon concentration (C)
depends on the emission (E) and in the Carbon con-
centration of the system, equation (1). The change
global average surface temperature (T) depends on the
atmospheric Carbon Concentration and on the system
temperature itself, equation (2).
dC(t)
dt
= −σC(t) + βE(t) (1)
526
Gay-Garcia C. and Bastien B..
Stabilizing Global Temperature Through a Fuzzy Control on CO2 Emissions.
DOI: 10.5220/0005547605260531
In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (MSCCES-2015), pages
526-531
ISBN: 978-989-758-120-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
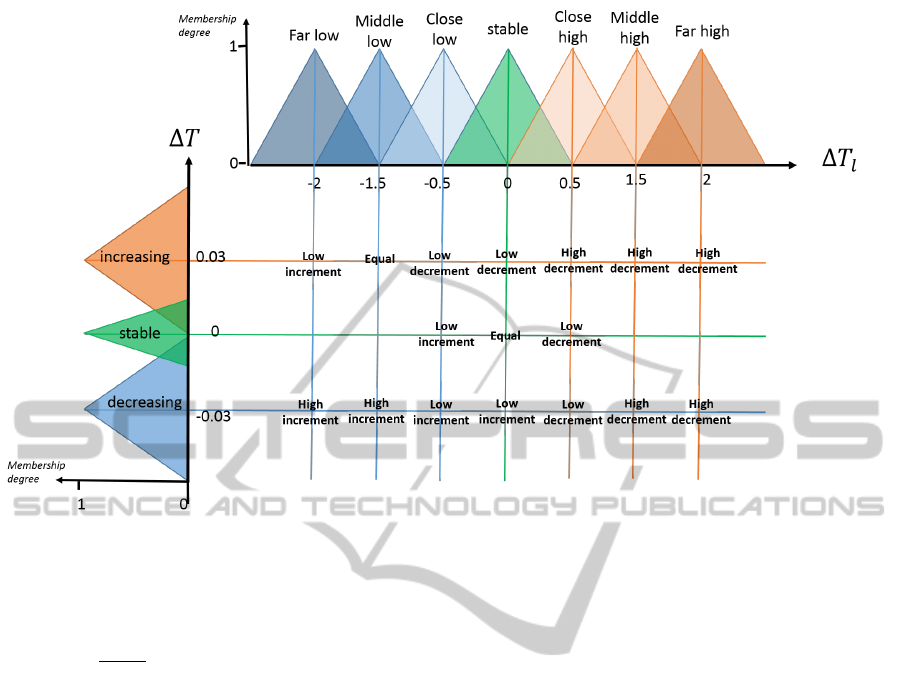
Figure 1: Fuzzy sets and Inference Rules. Top: Closeness to desired temperature, left: change in temperature, inside: change
in carbon emissions. Important note: the fuzzy sets have gaussian shape, the triangules showed here are just used to simplify
the illustration.
dT (t)
dt
= −αT (t) + µC(t) (2)
The constants are σ = 0.018/year, α = 0.03,
µ = 0.00045 (Tahvonen et al., 1994) and β =
0.47ppm/GtC (Maier-Reimer and Hasselman, 1987),
the atmospheric carbon concentration and the global
average surface temperature in the equations are taken
as the anomalies relative to 1959. In our simulations,
the carbon concentration levels (Boden et al., 2013)
and temperature (NASA, 2014) on 2010, are default
settings. The user should set the desired temperature
of stabilization, and the climate model will start com-
puting with the emissions data of one of the Repre-
sentative Concentration Pathways (RCP) (Moss et al.,
2007) that IPCC proposes.
The control input variables are the closeness of the
actual temperature to the target temperature, and the
temperature change, relative to the previous year. The
control output is the change in the carbon emissions
that would need to be made relative to the previous
year emissions in order to drive the temperature to the
desired stabilization level.
Whenever the control is activated, the emissions
will totally depend on the control and the RCP emis-
sions data will no longer be followed.
3 FUZZY CONTROL
The input variables of the fuzzy control are the close-
ness to the desired temperature and the temperature
change relative to the previous year. As it can be seen
in Figure 1, the domain of both variables is divided
into fuzzy sets that follow a linguistic description,
the closeness to temperature domain is divided into
7 fuzzy sets (far low, middle low, close low, desired,
close high, middle high and far high) which represent
how close is the actual temperature to the desired one.
The domain of the temperature change relative to the
previous year is divided into 3 fuzzy sets: increasing,
decreasing, stable.
The control works with inference rules (Figure 1)
that relate the input variables to the change in carbon
emissions that would need to be made, this domain
is divided in 5 fuzzy sets, linguistically described as:
high increment, low increment, equal, low decrement,
high decrement.
The range of action for the input variables was se-
lected having in mind the 2 degrees agreement and the
maximum and minimum change in average tempera-
ture from year to year. The range for the output vari-
able was selected using the maximum and minimum
change in carbon emissions proposed by the IPCC in
the RCPs.
StabilizingGlobalTemperatureThroughaFuzzyControlonCO2Emissions
527
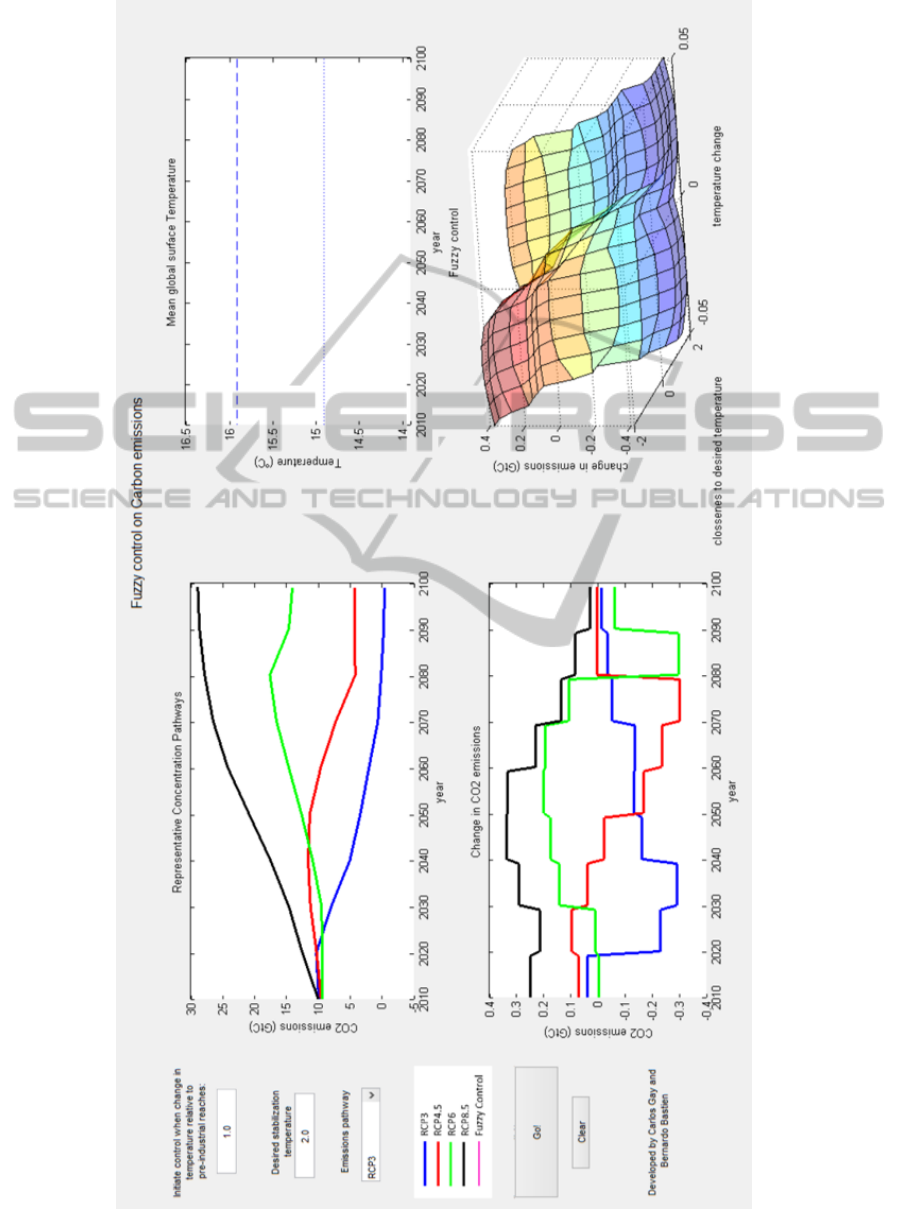
Figure 2: Graphical User interface simulator, more information in Section 4.
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
528
4 GRAPHICAL USER
INTERFACE
The principal result of this work is an interactive
Graphical User Interface (GUI) generated in MAT-
LAB (Figure 2) that simulates the temperature and
show the principal results. At the left side there
are three user inputs, the activation temperature, the
desired stabilization temperature and the emissions
pathway that the simulation will follow until the con-
trol is activated.
The top left graphic shows the four possible sce-
narios (RCPs) that the user can choose, the bottom
left panel shows the change in carbon emissions of
those scenarios. At the top right panel are shown
two lines, corresponding to the desired temperature
(dashed line) and the activation temperature (dotted
line). The rules surface, associated to the inference
and rules of the control is shown in the bottom right
side. Whenever the button ”Go” is pushed the simula-
tion will start and a magenta line (or dot) will be draw
on the four graphics, showing the actual path that the
simulation is taking.
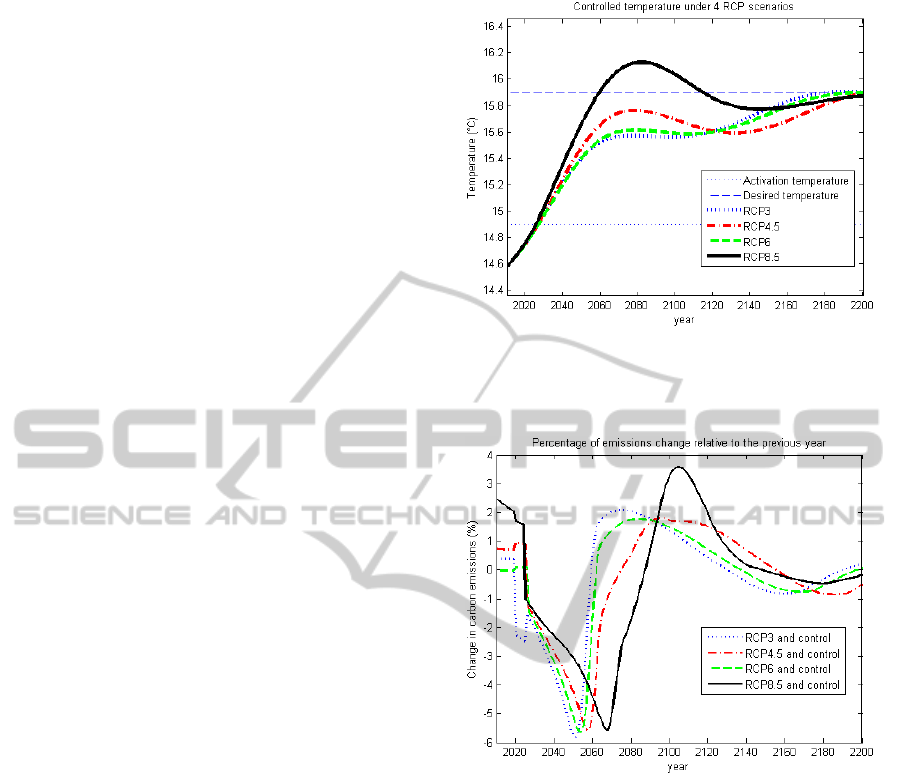
5 EXPERIMENTS
We set the activation temperature at 1
◦
C and the sta-
bilization temperature at 2
◦
C, then we simulate under
the four RCPs and we obtain the results of Figure 3
and 4. As we can see, the temperature paths are quite
different, under RCP3 the stabilization is reached by
the year 2200, and it has a local stabilization from
2050 to 2100. The other projections don’t have any
50-year local stabilization and is not guaranteed the
stabilization at year 2200. Despite of the great differ-
ence on temperature projections, the change in carbon
emissions (%) are very similar, which could indicate
that the actions taken in the incoming years will be
key in the long term global warming.
Furthermore, we ran the model stabilizing at 2
◦
C,
following the four RCPs and activating the control at
1
◦
C, 1.5
◦
C, 1.8
◦
C and 2
◦
C. The results are shown on
Figure 5.
6 DISCUSSION
6.1 RCP3 Scenario
Following the most optimistic scenario is not the best
option in terms of economic growth and tempera-
ture stabilization, for a few reasons. As we can see
Figure 3: Temperature projected under the RCP scenar-
ios, until activation temperature is reached (1
◦
C from pre-
industrial. Stabilization temperature: 2
◦
C. Activation year:
2026 for RCP3,
Figure 4: Percentage of emissions that would need to
change relative to the previous year.
in Figure 5: Row1, Column1 (R1C1), the emissions
control that activates at 1
◦
C and 1.5
◦
C stabilize the
temperature at 2
◦
C (15.9
◦
C) and in R1C2 is shown
that an earlier control lead to emit more carbon than
the suggested by the scenario. The activation tem-
peratures set in 1.8
◦
C and 2
◦
C do not fire the con-
trol because under the RCP3 scenario the temperature
never reaches those numbers, in R1C2 we can see that
the change in carbon emissions relative to the previ-
ous year is vertical for those activation temperatures,
this is because the change in emissions indeterminate,
which means that the emissions cross the zero and
carbon sequestration is supposed.
6.2 RCP4.5 Scenario
In R2C1 is shown that all temperatures could reach
stabilization but an early control activation avoids
StabilizingGlobalTemperatureThroughaFuzzyControlonCO2Emissions
529
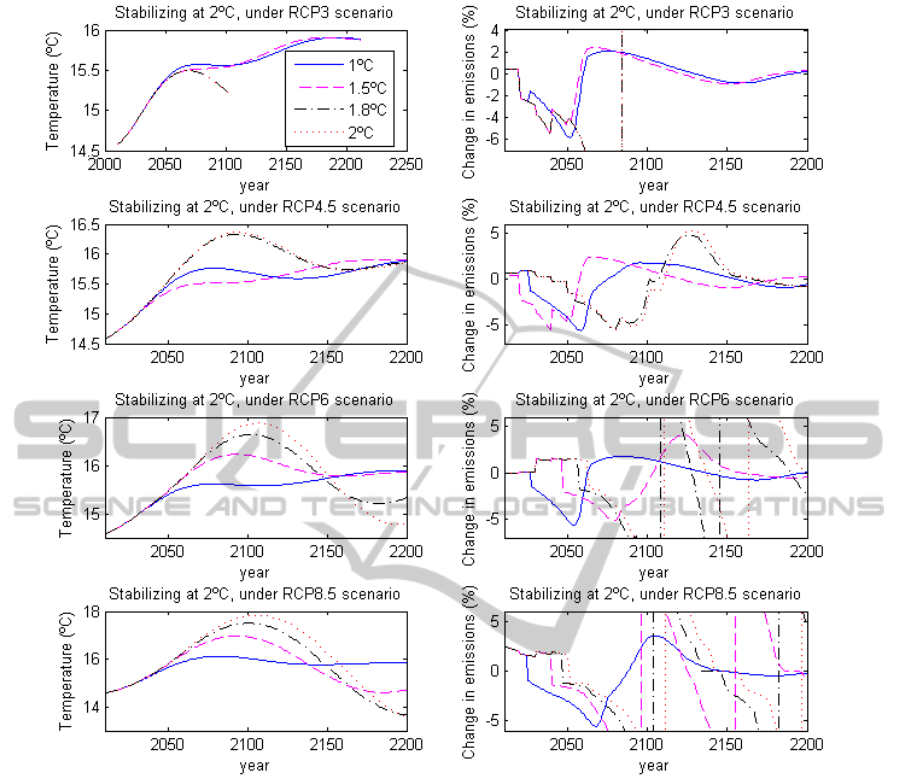
Figure 5: Simulations under RCP3, RCP4.5, RCP6 and RCP8. The control is activated at 1
◦
C, 1.5
◦
C, 1.8
◦
C and 2
◦
C, each
row of plots represents an RCP (R1:RCP3 and so on). The first column (C1) is for temperature and the second column (C2)
is for their respective change in emissions
temperature overshooting. We can also observe in
R2C2 that an earlier activation the negative peak is
reached earlier but the amplitude between the neg-
ative and the positive peaks is less, which means
that technologies and global policies wouldn’t have
to change drastically in a few years.
6.3 RCP6 Scenario
In R3C2 of Figure 5, is shown that the temperture sta-
bilization is reached only when the control is activated
at 1
◦
C and 1.5
◦
C (with overshooting), otherwise dur-
ing the first 200 years the temperature will acquire an
oscillatory behaviour, moreover in R3C2 we can see
that activating the control at 1.8
◦
C and 2
◦
C would im-
ply carbon sequestration methods.
6.4 RCP8.5 Scenario
If the emissions path follow the worst scenario in
the following years, a temperature stabilization (with
overshooting) could be reached only if the control
activates very early, at 1
◦
C (R4C1). Otherwise the
temperature would oscillate and carbon sequestration
would be needed (R4C2).
7 CONCLUSIONS
With the results obtained in the simulations we can
take decisions by answering the following question:
Under which scenario we are developing? So then, it
is possible to observe at what temperature we should
SIMULTECH2015-5thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
530

activate the control in order to stabilize the temper-
ature. There are some cases where the control acti-
vation leads to increment the emissions immediately,
which can give us an idea that this kind of control can
also lead to economic growth.
This simulation tool with the fuzzy control pro-
posed is a very powerful instrument in climate change
policy and international agreements. The configura-
tion options allow us to project under certain circum-
stances that answer the questions: When are we tak-
ing action? and, What is our goal stabilization tem-
perature?
The results will give us not just how many GtC
we should decrease or increase every year, but also
the percentage of emissions relative to the previous
year, which could give us an idea of how much it will
cost us (Figure 4).
This instrument is a common ground where spe-
cialists in diverse areas of climate change could con-
tribute in order to set the parameters that we should
explore and simulate so that the we can make the best
decisions.
In future work, we seek to not only project the
amount of carbon emissions that should be changed,
but also the amount which each country should con-
tribute to accomplish the goal, based on a fuzzy infer-
ence system that asses every country possibilities ans
responsibility.
REFERENCES
Boden, T. A., Marland, G., and Andres, R. J. (2013).
Global, regional, and national fossil-fuel co2 emis-
sions.
Javadikia, P., Tabatabaeefar, A., Omid, M., Alimardani, R.,
and Fathi, M. (2009). Evaluation of intelligent green-
house climate control system, based fuzzy logic in
relation to conventional systems. In Artificial Intel-
ligence and Computational Intelligence, 2009. AICI
’09. International Conference on, volume 4, pages
146–150.
King, D. (2011). ”copnhagen and cancun”, internationl cli-
mate change negotiations: Key lessons and next steps.
Smith School of Enterpise and the Environment, Uni-
versity of Oxford, :12.
Maier-Reimer, E. and Hasselman, K. (1987). Transport
and storage of co2 in the ocean - an inorganic ocean-
circulation carbon cycle model. Clim Dynam, (2):63–
90.
Martinez-Lopez, B. and Gay-Garcia, C. (2011). Fuzzy con-
trol of co2 emissions. Proceedings: Eigth Interna-
tional Conference on Fuzzy Systems and Knowledge
Discovery.
Moss, R., Babiker, M., Brinkman, S., Calvo, E., Carter, T.,
Edmonds, J., Elgizouli, I., Emori, S., Erda, L., Hib-
bard, K., Roger, J., Kainuma, M., Kelleher, J., Lamar-
que, J. F., Manning, M., Matthews, B., Meehl, J.,
Meyer, L., Mitchell, J., Nakicenovik, N., O’Neill, B.,
Pichs, R., Riahi, K., Rose, S., Runc, P., Stouffer, R.,
van Vuuren, D., Weyant, J., Wilbanks, T., van Yper-
sele, J. P., and Zurek, M. (2007). Towards new scenar-
ios for analysis of emissions, climate change, impacts,
and response strategies. IPCC Expert meeting report.
NASA (2014). Giss surface temperature analysis (gistemp).
giss.nasa.gov.
Parry, N., Palutikof, J., Hanson, C., and Lowe, J. (2008).
Squaring up to reality. Nature Reports Climate
Change, :68–71.
Tahvonen, O., Von Storch, H., and Von Storch, J. (1994).
Economic efficency of co2 reduction programs. Clim
Res, (4):127–141.
Tong, R. (1977). A control engineering review of fuzzy
systems. Automatica, 13(6):559 – 569.
StabilizingGlobalTemperatureThroughaFuzzyControlonCO2Emissions
531
