
Attack Surface and Vulnerability Assessment of
Automotive Electronic Control Units
Martin Salfer and Claudia Eckert
Technische Universit
¨
at M
¨
unchen, M
¨
unchen, Germany
Keywords:
Security Metrics, Embedded Systems, Cyber-Physical Systems, Exploit Engineering Cost Assessment.
Abstract:
Modern vehicles are controlled by an on-board network of ECUs (Electronic Control Units), which are spe-
cially designed computers that contain tightly tailored and customized software. Especially the trends for ECU
connectivity and for semi-autonomous driver assistance functions may have an impact on passenger safety and
require thorough security assessments, yet the ECU divergence strains those assessments. We therefore pro-
pose an easily automated, quantitative, probabilistic method and metric based on ECU development data and
software flash images for the attack surface and vulnerability assessment automation. Our method and metric
is designed for the integration into an (iterative) engineering process and the facilitation of code reviews and
other security assessments, such as penetration tests. The automotive attack surface comprises especially in-
ternal communication interfaces, including diagnosis protocols, external and user-accessible interfaces, such
as USB sockets, as well as low-level hardware interfaces. Some exemplary indicators for the vulnerability are
access restrictions, casing tamper-resistance, code size, previously found vulnerabilities; strictness of compil-
ers, frameworks and application binary interfaces; conducted security audits and deployed exploit mitigation
techniques. This paper’s main contributions are I) a method and a metric for collecting attack surface and pre-
dicting the engineering effort for a code injection exploit from ECU development data and II) an application
of our metric and method into our graph-based security assessment.
1 INTRODUCTION
The automotive industry drives ECU (Electronic Con-
trol Unit) consolidation and connectivity for eco-
nomic, functional and environmental reasons. Yet,
the complexity of deep integration and internetwork-
ing also brings hardly foreseeable security implica-
tions. Some were revealed by practical attack stud-
ies, e.g., (Koscher et al., 2010; Checkoway et al.,
2011). Security researchers demand more objective
security engineering instead of mere expert intuition
(Schneier, 2012). The German National Road Map
for Embedded Systems explicitly demands reliable,
quantified security statements for embedded systems
(Damm et al., 2010).
A vehicle’s attack surface increases due to the
internetworking of control units with the environ-
ment and due to the integration of abundant services
and functionality, e.g., for highly automated driving.
The attack motivation rises due to asset accumula-
tion: A common car will bear payment credentials for
tolling, parking and electric charging and have access
to cloud services, including sensitive and personal
data.Security fixes are rather expensive to create and
to deploy for the automotive industry, even compared
to enterprise systems: Every change requires thor-
ough and lengthy testing for guaranteed side-effect
free safety quality. A vehicle’s life cycle spans over
more than a decade, which makes security support ex-
tra costly. Hence, the automotive industry invests in
comprehensive engineering and security assessments
with a long-term foresight. One method is the assess-
ment of an ECU’s attack surface. A high grade of au-
tomation and efficiency is necessary for handling the
many, deeply customized automotive ECUs. “There
is a pressing need for practical security metrics and
measurements today” (Manadhata and Wing, 2011).
Data collection for security analysis is a tedious
task, which could be facilitated greatly by automa-
tion. Yet, typical corporate IT (Information Technol-
ogy) data collection software and methods are not ap-
plicable for automotive IT or CPSs (Cyber-Physical
Systems). ECUs/CPSs usually communicate hetero-
geneously and combine a large, fast-changing and ob-
scure variety of real-time and general-purpose oper-
ating systems, application binary interfaces and file
Salfer M. and Eckert C.
Attack Surface and Vulnerability Assessment of Automotive Electronic Control Units.
DOI: 10.5220/0005550003170326
In Proceedings of the 12th International Conference on Security and Cryptography (SECRYPT 2015), pages 317-326
ISBN: 978-989-758-117-5
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
317

systems for the sake of maximum dependability and
efficiency and thus sustainability. While corporate IT
usually communicates homogeneously with IP (In-
ternet Protocol), automotive IT communicates with
a combination of CAN (Controller Area Network),
MOST (Media Oriented Systems Transport), LIN
(Local Interconnect Network), FlexRay, ByteFlight,
BroadR-Reach, etc. While corporate IT usually op-
erates homogeneously on x86 with POSIX-(Portable
Operating System Interface)-compliant operating sys-
tems, automotive IT operates on TriCore, Super-H,
PowerPC, V850, x86, ARM, etc. with OSEK (Of-
fene Systeme und deren Schnittstellen f
¨
ur die Elek-
tronik im Kraftfahrzeug) / VDX-(Vehicle Distributed
Executive)-, AUTOSAR-(AUTomotive Open System
ARchitecture)-, sometimes POSIX-compliant operat-
ing systems or even merely on bare metal. Online
data collection methods can therefore hardly cover all
available security measures that are integrated into au-
tomotive systems.
This paper focuses on the threat of injecting mali-
cious code using vulnerabilities of the actual imple-
mentation. Malicious code injection is one of the
most subtle and critical threats as it potentially en-
dangers all three main security goals at once: confi-
dentiality, integrity and availability. A general secu-
rity assessment has to, of course, also consider other
threats, including the misuse of valid communication.
This paper presents a method for assessing the at-
tack surface and vulnerability likelihood for individ-
ual ECUs. However, it does not cover implications
of the on-board network architecture or the attractive-
ness of individual ECUs or functions for an attacker.
Our research on the complexity problem of compre-
hensive and reliable security assessments of an auto-
motive on-board network inspired us for this paper.
The contributions of this paper are:
I. We formalized a method and a metric based on
development data for systematically assessing the
attack surface and attacker effort for automotive
ECUs. The method and metric arose in coopera-
tion with automotive OEM security experts and is
designed for a seamless integration into a graph-
based on-board network security assessment.
II. We applied and integrated the method and met-
ric in our attack graph-based assessment and show
exemplary results.
Section 2 defines, describes and discusses our
method. Section 3 shows an application of our
method on a complete on-board network with an at-
tack graph construction algorithm. Section 4 gives
an overview over related work. Section 5 discusses
ideas for optimizing this assessment. And Section 6
concludes our automotive attack surface and vulnera-
bility assessment method.
2 METHOD
This section introduces a systematic approach for as-
sessing the attack surface and vulnerability of an auto-
motive ECU. The anticipated threat is the injection of
malicious code. We will systematically walk through
our method with the following steps or subsections.
1. Attack Surface Collection – How much and what
attack surface bears an ECU? An ECU can only be
exploited if it bears interfaces to the outside. We
collect accessibility information mainly by sourc-
ing different documents and databases.
2. Vulnerability Prediction – How likely is attack
surface vulnerable?
3. Vulnerability Finding Effort– How much effort is
presumably necessary to find a vulnerability on
the attack surface?
4. Exploit Creation Effort – How much effort would
a potential vulnerability consume, considering the
effort for accessing the attack surface, engineering
a basic exploit against it and finally counteracting
possibly deployed exploit mitigation techniques?
2.1 Attack Surface Collection
The first step for the attack surface estimation is the
collection of the attack surface. The attack surface is
the sum of interaction opportunities with an ECU, i.e.,
everything that can potentially influence the control
flow of the software. Such attack surface is typically
incoming data that is parsed and processed. Incoming
data can be found by monitoring the interfaces of an
ECU in use or by evaluating specification documents,
binary or source code. The attack surface comprises a
set of accessible services and inbound communication
as well as the system’s I/O and hardware interfaces.
Each software consists of program code and pro-
vides services. Each of these services could be poten-
tially abused for injecting code. An ECU’s “attack-
ability” correlates positively with its attack surface,
i.e., the more accessible a service is, the easier it is to
attack. Attack surface is obligatory for any attack. All
attack surfaces are treated as complementary, i.e., one
surface must be considered isolated from other attack
surface. Attack surfaces are not mentioned compre-
hensively as an attacker with enough creativity can re-
veal new, unlisted surface, so a residue called Others
will always exist. Specialized ECUs can have extra
SECRYPT 2015 - International Conference on Security and Cryptography
318
features and therefore attack surface not mentioned
here or not yet introduced into mass market ECUs.
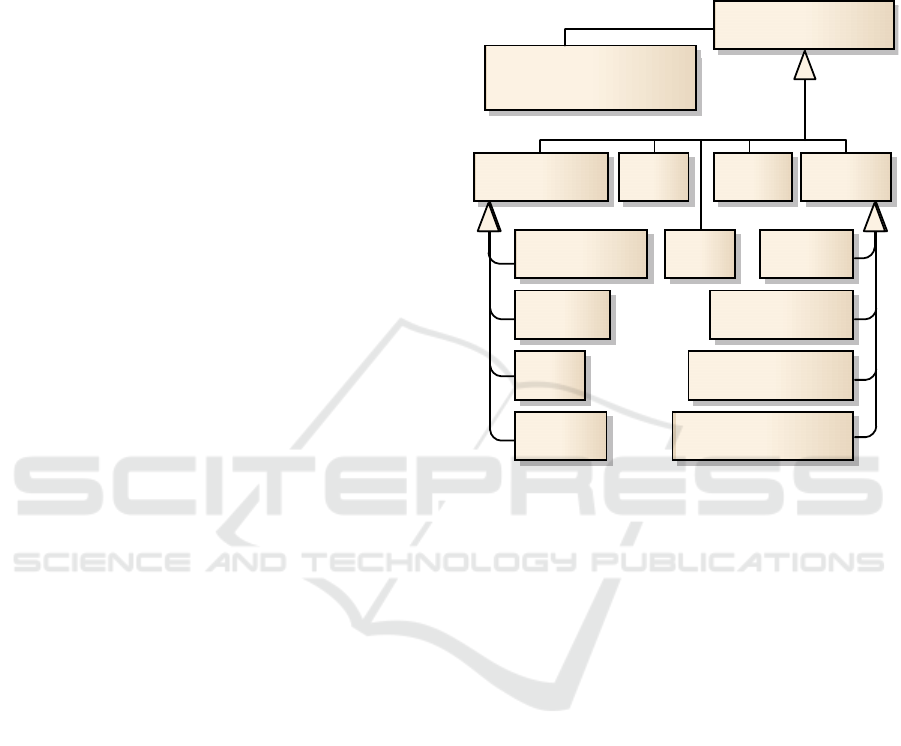
We classify an ECU’s attack surface as below or
as seen in Figure 1.
• Incoming Data is any data arriving at an ECU.
– Job Parameters are input fields in ECU jobs.
Jobs are services that can be called via the
on-board network and are useful for mainte-
nance and diagnosis. Access to a subset of
jobs (and therefore to the on-board network) is
legally obligatory over the OBD-II (On-Board
Diagnostics) port and therefore represents at-
tack surface prescribed in all cars by law.
– User Input is data supplied directly by the user,
e.g., files, streams or user interface input.
– Signals are routinely received data chunks on
an on-board network for regular operation, e.g.,
wiper commands or speed information.
– Meta Data represents any supplementary data,
which could influence parsers or drivers, e.g.,
CAN or ethernet frame IDs.
• Apps are third party-supplied software packets.
• Reflash Routines are ways for replacing an ECU’s
software with a supplied flash image.
• Hardware Attack Surface Spots are spots that can
be tampered with only with physical access.
– Boot Memory comprises any storage that could
allow execution of attacker supplied code,
e.g., an EEPROM (Electrically Erasable Pro-
grammable Read-Only Memory) or external
flash memory.
– Debug Interfaces are any ports that are not used
in regular operation or maintenance, but were
used during development and might be used
again for advanced maintenance, e.g., JTAG
(Joint Test Action Group) interface. Debug in-
terfaces intentionally allow very deep analysis
and manipulation.
– Inter-Chip Communication Channels are any
data exchange links inside an ECU (usually
in between semiconductors) that could be re-
vealed and tampered with, e.g., UART (Univer-
sal Asynchronous Receiver/Transmitter), I2C
(Inter-Integrated Circuit) and SPI (Serial Pe-
ripheral Interface). Such interfaces could be re-
vealed and tampered with.
– A Side Channel Attack is measuring or ma-
nipulating an ECU physically for information
gathering or control flow change, e.g., power
glitches or laser pulses can jump the program
counter or let operations silently fail.
• Other represents any other not explicitly men-
tioned attack surface. This listing is not exhaus-
tive and is subject to continuous extension.
class AttackSurface Taxonomy
Node
System Model::ECU
AttackSurface Spot
Incoming Data HW SpotReflash
Job Parameter
User Input
Apps
Signals
Meta Data
Boot Mem
Debug Interface
IC Communication
Side Channel Attack
Other
*
+attackSurface
*
Figure 1: Attack Surface Taxonomy – ECUs bears attack
surface that can be divided into Attack Surface Spots of ei-
ther Incoming Data, installed Apps, a Reflash mechanism,
HW Spots or any Other, yet to be found, attack surface.
Cars often also have a single exposed ECU for com-
munication and have Bluetooth, Wi-Fi, RDS (Radio
Data System), TMC (Traffic Message Channel), DAB
(Digital Audio Broadcasting), GSM (Groupe Sp
´
ecial
Mobile), CDMA (Code Division Multiple Access),
UMTS (Universal Mobile Telecommunications Sys-
tem), LTE (Long Term Evolution), GPS (Global Po-
sitioning System) and other antennas and services
that count to their externally accessibly attack surface.
Some ECUs may also have 802.11p (vehicular WiFi)
for ITS (Intelligent Transportation System) support.
Typical ECUs are equipped with intra-vehicular com-
munication. Some may use radio communication for
internal communication, e.g., for comfort access ra-
dio keys or tire pressure control radio sensors on the
TPMS (Tire Pressure Monitoring System). These at-
tack surfaces are real, but are atypical for an ECU, i.e.,
only one ECU out of about 50 has such an feature and
attack surface. Previous publications named already
many attack spots: from tire pressure monitoring sen-
sors up to Bluetooth and music CDs (Francillon et al.,
2010; Ishtiaq Rouf et al., 2010; Koscher et al., 2010;
Checkoway et al., 2011).
Attack Surface and Vulnerability Assessment of Automotive Electronic Control Units
319

2.2 Vulnerability Prediction of the
Attack Surface
Attack surface per se is only vulnerable if there is an
exposed, security-relevant defect. If we cannot asses
the isolated attack surface by itself that is responsi-
ble for a certain attack surface, someone can still ap-
proximate by assessing the overall software of an en-
tire ECU. We can estimate a surface’s vulnerability by
looking at the ECU’s vulnerability density v, which is
the number of security relevant defects per ECU code
size, i.e.,
v =
“security relevant defects”
“code size”
. (1)
A typical code size unit is the number of statements.
Any vulnerability originates from either accident (un-
intentional software defects) or a backdoor (inten-
tional software defects). A backdoor can be either
maliciously for later exploitation or benign for later
maintenance. So the vulnerability density sums up
the number of intentional and unintentional vulnera-
bilities. For automotive applications, we assume the
density of intentional vulnerabilities (backdoors) be-
ing insignificant compared to the density of uninten-
tional defects. The neglect of intentional vulnerabil-
ities seems true even for most open source products
as vulnerability advisories are to be found often and
back-door warnings are to be rarely found. We there-
fore approximate the vulnerability density by the den-
sity of unintentional vulnerabilities.
Quantifying the vulnerability density directly
from code is hard as it is not decidable for a ma-
chine whether a control flow change was intended or
not.But the vulnerability density v can be approxi-
mated by the software’s defect rate d. The vulnera-
bility density correlates strongly with the defect den-
sity as carefully designed and implemented code typ-
ically contains less vulnerabilities. The better soft-
ware quality, the less defects and the less vulnerabili-
ties. We approximate the vulnerability density v from
a software’s defect density d (or fault density) as sta-
tistical analysis in (Alhazmi et al., 2005) shows that
usually 1 % to 5 % of all defects are security relevant
defects, i.e.,
v ≈ x ∗ d with x = [0.01, 0.05]. (2)
One way to obtain defect density values straight for-
ward is deriving those from process metrics, e.g., bug
tracker statistics. A approximation can be done as-
suming x = 0.03, the middle of Alhazmi’s found se-
curity relevance rate, and d = 0.001 for mature and
secure software in the productive phase:
v ≈ 0.001 ∗ 0.03 = 0.00003. (3)
Typical indicators for an ECU’s individual defect den-
sity are mentioned below.
• The number of previously found defects and the
code size of similar ECUs are an approximation
basis for the expected defect density.
• The ASIL (Automotive Safety Integrity Level) is an
indicator for thoroughly checked code and there-
fore a lower expectation for defects.
• Safety measures avoid any defects and raise soft-
ware quality, e.g., strict type checking, assertions,
boundary checking and input sanitation.
• A conducted code audit is an indicator for a lower
defect density expectancy as a check by several
people ensures a higher code quality.
• A conducted penetration test is an indicator for a
lower defect density as such tests reveal defects
before a release and allow efficient hardening.
The likelihood for the existence of a vulnerability can
be modelled with a Bernoulli process P
B
(X > 0) with
P
B
being a Bernoulli process distribution function, X
being the number of vulnerabilities, q being the prob-
ability of a single attack surface spot of being free
from vulnerabilities, v being the vulnerability density,
and i the number of available Attack Surface Spots,
and x the average code size of the attack surface spots:
P
B
(X > 0) = 1 − P
B
(X = 0) = 1 − q
ix
= 1 − (1 − v)
ix
.
(4)
Assuming an ECU would have about 200 attack sur-
face spots with an average code size of 5 lines, the
ECU’s likelihood for a vulnerability is according to a
Bernoulli process about
P
B
(X > 0) = 1 − (1 − 0.00003)
200∗5
≈ 3%. (5)
2.3 Vulnerability Finding Effort
Estimation
An attacker has to search on the attack surface for
vulnerabilities, before being able to exploit it. One
method to reveal exposed vulnerabilities is fuzz test-
ing, also called fuzzing. Fuzzing stimulates existing
attack-surface with intentionally modified payload in
order to trigger malfunction. Seeing a certain reac-
tion, the attacker can try exploiting the reaction for
malicious code execution. Another way is binary
analysis, i.e., inspecting the firmware code for iden-
tifying input channels and its data processing directly
in the code. Any method requires an initial set-up ef-
fort; A fuzzing set-up requires a functional ECU with
equipment to modify input data and a good under-
standing of used protocols. The analysis of binary
SECRYPT 2015 - International Conference on Security and Cryptography
320

code requires an extraction of the firmware. Subse-
quently, all of the attack surface needs to be checked.
We assume an attacker to only search as long for a
vulnerable attack surface until one is found. With our
above assumption of a vulnerability density v, we can
assess the success likelihood of an attacker.
We define the vulnerability finding effort f as the
sum of both the initial effort f
0
and the sum of all
individual attack surface probing efforts f
i
from with
n attack surface spots, i.e.,
f = f
0
+
i=n
∑
i=1
( f
i
). (6)
Alternatively, the vulnerability finding effort can also
be estimated by the expected number of vulnerability
finding tries ¯n multiplied with the average vulnerabil-
ity finding effort
¯
f
i
, i.e.,
f = f
0
+ ¯n ∗
¯
f
i
. (7)
The expected number of vulnerability finding tries ¯n
can be derived from the stochastic expected value of
a Bernoulli process P
B
. The special case compared to
standard Bernoulli processes is that the process ends
as soon as the first success has occurred, i.e., ”vulner-
ability found”. The possible outcomes therefore are
in Table 1.
Table 1: Bernoulli Tries and Results.
Tries Results
0 -
1 1
2 01
3 001
... ...
n 0...01
n 0...00
The expected value ¯n for the number of tries in such a
Bernoulli process P
B
with success probability p, fail-
ure probability q, stochastic random variable X for the
number of successes and a maximum number of tries
k (equalling the number of attack surface spots to test
for vulnerabilities) can therefore be computed with
¯n = 0 +
i=k
∑
i=1
i ∗ q
i−1
∗ p
+ k ∗ P
B
(X = 0). (8)
With some simplification and replacing the p and q
(how they are usually called in stochastic literature)
with v and (1 − v) as we use it, the expected number
¯n of tries till a vulnerability is found can be computed
with
¯n = v
i=k
∑
i=1
i(1 −v)
i−1
+ k (1 − v)
k
. (9)
The expected value for the finding effort
¯
f in combi-
nation with an assumption about the average individ-
ual finding effort value
¯
f
i
therefore is
¯
f = f
0
+
¯
f
i
v
i=k
∑
i=1
i(1 −v)
i−1
+ k (1 − v)
k
!
. (10)
2.4 Attack Surface Exploitation Effort
The exploitability of a vulnerability of given attack
surface depends on various factors such as the pro-
cessor architecture, compilers, input parser types and
exploit mitigation techniques. We also consider the
use of authenticated functions, so that additional ef-
fort is necessary to access and subsequently exploit
vulnerabilities of attack surface. The effort we try to
estimate is on finding and exploiting then unknown
(”zero day”) vulnerabilities. As soon as details of vul-
nerabilities or the assessed platform are published, the
effort drops. We systematically walk through an as-
sessment method for an ECU with the following steps
or subsections.
1. Preliminaries – An attacker profile needs to be de-
fined to be referenced to for a homogeneous attack
effort quantification.
2. Access Effort – Attack surface can require effort
for overcoming software-based access or authen-
tication checks or protective hardware means.
3. Basic Exploitation Effort – Attack surface spots
require different basic techniques and thus effort.
4. Counter Exploit Mitigation Effort – Even vulnera-
ble attack surface can be inherently robust against
exploitation due to exploit mitigation techniques,
e.g., stack canaries.
2.4.1 Preliminaries – Reference Attacker Profile
Definition and Quantification Units
For estimating all attacker efforts quantitatively, we
need to define an Attacker Profile as a reference.
Our Attacker Profile represents a human attacker with
economic reasoning. Having a reference Attacker
Profile will allow us later to easily transpose an as-
sessment onto a different Attacker Profile. Capabil-
ities represent an attacker’s knowledge, techniques
and tools relevant for exploiting vulnerabilities. Each
Capability is proportionally weighted with a floating
point number x ∈ R
>0
as a Grade. It rates an At-
tacker Profile’s Capability in comparison to the cor-
responding Capability of the reference Attacker Pro-
file. The reference Attacker Profile Grades therefore
Attack Surface and Vulnerability Assessment of Automotive Electronic Control Units
321
are always defined as 1. The Grade definitions al-
low a directly proportional effort estimation for re-
lated Attacker Profiles. The Attacker Profile Capabil-
ities can be arbitrarily defined, yet this definition must
be constant throughout an entire security assessment
for comparability and must be precisely known to the
ones who define further Attacker Profiles and to the
ones who assess elementary exploit efforts. There-
fore, a reference attacker profile has to be documented
and all later steps must be able to refer to the initially
defined reference attacker. One exemplary inspiration
for an Attacker Profile is an informatics study pro-
gram curriculum due to the familiarity and the global
standardization for a well understood Attacker Pro-
file.A formal definition of an Attacker Profile can be
seen in Figure 2.
class Attacker Profile (SECRYPT)
Attacker Profile Grade
Capability
* 1
Figure 2: Attacker Profile – Our Attacker Profile represents
human attackers with economic reasoning. Each Capability
yields a Grade quantifier, i.e., how skilled or well equipped
an attacker is.
We define the effort e as a tuple of a capabil-
ity tag t and its corresponding effort amount r, i.e.,
e ∈ E = {(t, r)|t ∈ T ∧r ∈ R}. The effort amount r ∈ R
is defined here as the set of positive real numbers, i.e.,
R = R
>0
, and represents a currency value for com-
parability reasons. Typical effort measurements are
consumed time or money. Some vehicle insurances
research institutes measure effort in amount of time
required (for a reference attacker profile) and demand
cars being secure enough in terms of minimum time
effort required. Even though values can not be pre-
cise, we prefer using a currency unit as these allow
a more versatile comparison. A currency effort can
be compared with man-hour estimates with the help
of a reference Attacker Profile including a well de-
fined capabilities set, and a currency effort can also
be compared with labour and black market prices for
vulnerabilities. Capability tags t ∈ T can be mapped
on the capabilities of attacker profiles.
2.4.2 Access Effort
Attack surface differs in accessibility, i.e., different
access surface requires different effort for reaching it.
We define an attack surface’s access effort as a ∈ E.
The access effort determines how much to spend for
overcoming access restrictions.
Software security means for protecting or unlock-
ing attack surface are credential checks or firewall
rules. Authorization functions often challenge the
client with a code that has to be answered with the
correct response code. OEMs (Original Equipment
Manufacturer) put different effort in securing the au-
thentication. Depending on the used cryptographic al-
gorithms and key strengths, the access factor a varies
greatly. An ECU will always have at least some
(publicly) accessible attack surface as the authentica-
tion routine represents attack surface by itself. Soft-
ware unlocking of attack surface can occur by many
ways, e.g., snooping or brute-forcing a key or gaining
knowledge about it from social engineering. Sensitive
jobs (including the reflash mechanism) are secured
with a 16 bit key challenge-response authentication
and a 10 s retry blocker, as discovered by (Koscher
et al., 2010). Such an ECU can be brute forced within
15 days; Power cycling can reset the retry blocker and
speed up the brute force to reveal one key within 1.5
days.The reflash routine is usually strongly protected
due to its sensitivity and therefore bears a high ac-
cess effort a and differs starkly with the used crypto-
graphic algorithms and key size. The signal param-
eters are received without authentication over CAN;
The signals’ access effort is a
signals
=
/
0.
Hardware means for protecting attack surface are,
for example, resistive covers and being installed in
hardly accessible space. If an ECU is integrated in
a hardly accessible installation space, an attacker has
to remove many parts and therefore invest much effort
into accessing the ECU eventually. Resistive Covers
help in blocking access to internal ports, especially
development or debug ports, or to parts that contain an
ECU’s firmware. Chips can have cryptographic fea-
tures for protecting inter-chip communication or cryp-
tographically check the firmware image. Hardware-
based attack surface protection can also be supported
by software means; For example, certain side-channel
attacks can be rendered ineffective by special soft-
ware obfuscation techniques.
2.4.3 Basic Exploitation Effort
Vulnerable attack surface requires at least a min-
imum effort for injecting code, which we call the
basic exploitation effort b ∈ E. The effort differs
starkly, because ECUs are designed and built with
such different fundamental hard- and software.
Some hard- and software implicitly and carefully
checks all incoming or used data, some other hard-
and software uses incoming data naively. Whilst
some ECUs are programmed with automatically
input checking programming languages like Java
(or certain ASCET compilers), many ECUs are
directly programmed in C/C++, which does not
automatically check buffer boundaries and hence
SECRYPT 2015 - International Conference on Security and Cryptography
322

is more prone to buffer overflows
1
. Depending on the
input’s data type, a vulnerability is harder or easier
to exploit for malicious code execution. Buffer over-
flows typically allow a direct injection of code and
often an indirect manipulation of the CPU’s (Central
Processing Unit’s) program counter. Besides the pop-
ularity and the practicality of buffer overflow attacks,
any input (also primitive input) can cause code to re-
act unintentionally, albeit much harder to inject and
run code. We define four classes of input data regard-
ing the expected exploitation effort.
• Unchecked complex types are rather easy to ex-
ploit, e.g., strings/arrays or any buffered data on
C/C++. We define the basic exploitation effort for
unchecked complex types as b
u
.
• Checked complex or primitive types are rather
hard to exploit, e.g., a single int, bool and float
in C/C++/Java or strings/arrays in Java. Checked
complex types are immune to typical buffer over-
flow attacks, but can still provoke unintentional
code behaviour similar to single primitive types.
We define the basic exploitation effort for checked
complex or primitive types as b
c
.
• Unprivileged code is input that will be executed
with few permissions, e.g., apps.
• Privileged code is input that will be executed with
full permissions, e.g., firmware.
The classification will be relevant for possible exploit
mitigation techniques.
2.4.4 Exploit Mitigation Counter Effort
A vulnerable and accessible attack surface can be
non-exploitable due to explicit and implicit exploit
mitigation techniques. Exploit mitigation techniques
do by definition never avoid the exploitation entirely,
but raise the effort for making an exploit that is able
to successfully execute injected code. Some exploit
mitigation techniques found in state of the art ECUs
are described below.
• Stack canaries: Stack canaries are extra vari-
ables on the stack that are checked before criti-
cal actions, such as loading the program counter
with the return address. A simple buffer overflow
would overwrite (and usually invalidate) the stack
canary, too. Certain implementations even allow
sidestepping stack canaries by manipulating the
exception handler. We define the exploit mitiga-
tion counter effort against stack canaries as c
s
.
1
C/C++ is still often used, e.g., for time critical deter-
ministic behaviour. Many safety verification and certifica-
tion tools and methods exist for C/C++.
• NX (No eXecute bit): Memory can be marked
as non-executable (also called “modified Harvard
Architecture”), so injected code cannot be exe-
cuted. We define an attacker’s extra exploit effort
for counteracting NX as c
n
.
• ASLR (Address Space Layout Randomization):
Memory addresses can be randomized, so attack-
ers cannot easily predict addresses and exploit
code might fail. We define the exploit mitigation
counter effort against ASLR as c
a
.
• MPU/MMU/PS (Memory Protection Unit / Mem-
ory Management Unit / Privilege Separation):
Most ECUs have processors that watch memory
accesses and have operating systems that subdi-
vide code into isolated processes, so a successful
attacker cannot access the whole ECU. Once in-
side a running process, there is a lot more of at-
tack surface to interact with. This depends not
only on the software compilation and operating
system, but also on the processor security archi-
tecture behind the application binary interface as
certain ones have a fine grained permission sys-
tem. We define the effort for counteracting any
memory and privilege separation as c
p
.
• Other: New exploit mitigation techniques are
already researched on, e.g., control flow graph
checking, see (Kayaalp et al., 2014).
The reflash routine cannot be protected by exploit mit-
igation techniques as firmware has to be per se exe-
cutable and highly privileged, i.e., c =
/
0
2
.
We define the extra exploit creation effort that
is necessary due to exploit mitigation techniques as
c. Exploits on complex and primitive input types
can be counteracted with all mentioned techniques,
i.e., c ∈ (c
a
∪ c
n
∪ c
s
∪ c
p
). Malicious apps can only
be counteracted with privilege separation techniques,
i.e., c ∈ c
p
. And injected malicious privileged code
can not be counteracted, i.e., c =
/
0.
2.5 Attack Surface Summary
We conclude the method and metric with summariz-
ing the formulae above. An ECU’s vulnerability can
be modelled as seen in Section 2.2 with
P
B
(X > 0) = 1 − (1 − v)
ix
. (11)
The expected finding effort
¯
f can be computed as seen
in Section 2.3 with
¯
f = f
0
+
¯
f
i
v
i=k
∑
i=1
i(1 − v)
i−1
+ k (1 − v)
k
!
. (12)
2
A reflash routine can still be well protected by strong
cryptographic authentication, which implies a high access
effort a.
Attack Surface and Vulnerability Assessment of Automotive Electronic Control Units
323
The expected effort ¯g for creating a software exploit is
the sum of the expected access effort ¯a, the expected
basic effort
¯
b and the expected countermeasure mit-
igation effort ¯c as seen in Section 2.4 and combined
in
¯g = ¯a +
¯
b + ¯c. (13)
Finally, the expected overall ECU exploitation value
¯o is
¯o =
¯
f + ¯g. (14)
3 APPLICATION IN ATTACK
GRAPH CONSTRUCTION
The presented method and metric are designed for and
integrated into our attack graph generation for vehicu-
lar on-board networks. Attack graphs are a well estab-
lished security engineering method, but the plethora
of attack combinations makes manual construction
cumbersome and likely to miss relevant attack paths.
The automatic inclusion and assessment of the attack
surface and vulnerability based on development data
raises the accuracy of constructed attack graphs and
helps keeping attack graph-based security analyses
viable. A missing attack vector might enable extra,
unseen attack paths that drastically facilitate compro-
mising a security goal. Security experts can enrich
and override automatically compiled information for
better soundness; certain factors are better judged by
humans, e.g., trending attack vectors or the level of
publicly available information on given control units
or software components. The attack graph algorithm
eventually constructs attack graphs with given and
harvested information and will show most likely at-
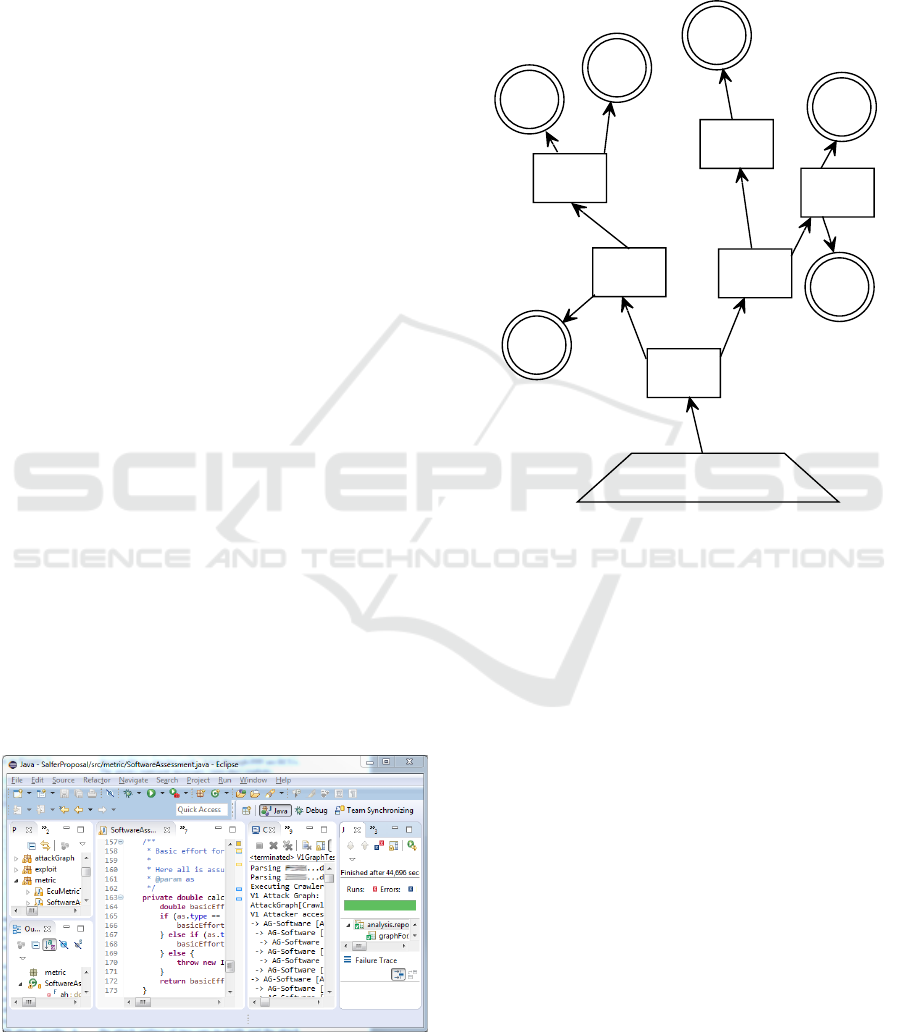
tack paths; see a run-time example in Figure 3.
Figure 3: Automated Attack Graph Construction – The inte-
gration of our metric and method into our graph-based secu-
rity analysis facilitates the automatic construction of attack
graphs from development data.
We have applied the method and metric of this pa-
per together with our attack tree construction algo-
rithm onto an ECU network and depicted the result-
ing, simplified, altered and anonymized attack tree in
Figure 4.
AttackerAccess
ECU B
ECU D
ECU F
A4
ECU C
A3
ECU E
A6
A5
A1
A2
ECU A
„Jeder kann das wofür er sich Zeit nimmt es zu verstehen“ – MarS
Figure 4: Resulting Attack Tree – The depicted attack graph
is a simplified, altered and anonymized assessment result
of a modern vehicle’s ECU network, based on this paper’s
method. The AttackerAccess is the defined access point for
an attacker into the vehicle. ECU A through ECU F are
ECUs. Arrows represent potential attack surface exploita-
tions that are most likely to happen according to the assess-
ment. A1 through A6 are assets that an attacker targets.
4 RELATED WORK
Howard et al. started in 2003 identifying Windows
services and sockets as well as similar constructs as
attacker entry points and weighted them according
to their (system or user) privilege and evaluated his
method on several Windows versions, as can be seen
in (Howard et al., 2005). Manadhata and Wing for-
malized an attack surface metric for software source
code in (Manadhata and Wing, 2011). They measure
the attack surface of three classes: methods, chan-
nels and files. A typical ECU does not have TCP
(Transmission Control Protocol), SSL (Secure Sock-
ets Layer), TLS (Transport Layer Security) or UNIX
socket channels, so the channel attack surface is 0.
The file system of an ECU is typically not accessible,
SECRYPT 2015 - International Conference on Security and Cryptography
324

so the file attack surface is 0, too. Yet, their attack
surface metric is made under the premiss of having
access to source code, which we do not have unfor-
tunately. Our metric instead is designed for the outer
attack surface of an ECU, where an attacker can only
judge from available visible surface such as commu-
nication interfaces and firmware code.
Miller and Valasek assessed the attack surface of
a couple more cars from publicly available sources
by enumerating mentioned features and giving a sub-
jective rating for the criteria outer accessibility, net-
work separation and incorporated features in (Charlie
Miller and Chris Valasek, 2014).
The CVSS (Common Vulnerability Scoring Sys-
tem) quantifies how severe a vulnerability is with a
base, temporal and environmental metric set. Each
criteria is value that can be selected from an array of
3 to 5 numbers according to the verbally given sever-
ity. CVSS works only for scoring already existing and
found vulnerabilities, yet it cannot assess prospective
vulnerability.
Vulnerability databases allow to directly reason
about a system’s vulnerability in case of a positive
finding. Rich research projects and results exists for
corporate IT systems, e.g., (Roschke et al., 2009)
at the HPI (Hasso-Plattner-Institut) worked on uni-
fying vulnerability information as an input for attack
graphs. They sourced the NVD (National Vulnerabil-
ity Database), parsed textual descriptions and eventu-
ally produced homogeneous, machine-readable vul-
nerability information ready for attack graph con-
struction. Many vulnerability prediction models
cover the change in security advisories, i.e., they anal-
yse the advisory output over time, e.g., (Alhazmi
et al., 2007). Yet, we cannot use those databases
or methods as automotive ECUs are custom made
and heavily modified for optimized performance. We
needed to use a method that works with black box
software.
5 FUTURE WORK
An attack surface estimation becomes more accu-
rate by considering more information. This section
describes some additional sources and methods that
could be included.
Semi-automated penetration test tools and tech-
niques could reveal further attack surface and esti-
mate its vulnerability. Many penetration test tools
specialised for embedded systems were created in re-
cent years and are actively maintained by the security
community. For example, the open source tools bin-
walk
3
and BAT (Binary Analysis Tool)
4
are firmware
software analysis tools and might reveal further attack
surface assessment data, e.g., ECU-internal software
architecture or run-time information. Collecting data
about real-word exploitation attempts may reveal new
and additional attack surface.
The method presented in this paper assumes a rea-
sonable mid-level, but fixed, effort for each attack sur-
face. This means an attacker is assumed not gaining
experience, and vulnerability finding efforts are aver-
aged out evenly over the attack surface. Yet, the effort
for testing an attack surface’s vulnerability might dif-
fer greatly, and an attacker usually gains experience
with every attack surface he or she tests. A succes-
sor method could differentiate the vulnerability find-
ing effort f for each attack surface type and create
formulae and an attacker model for growing experi-
ence.
Security is a software attribute that is hard to mea-
sure and even harder to validate. Analogously, effort
estimations need to be adjusted regularly. One valida-
tion method is consulting security experts, as (Man-
adhata and Wing, 2011) and we did for our attack sur-
face metric; Unfortunately is consulting experts rather
subjective. Validation data can be collected from sys-
tematic security assessments like penetration tests; es-
pecially from their data sets about attacker capabili-
ties and corresponding actual effort for exploiting an
ECU. A successor method could include said pene-
tration test data and the defect density predictions of
software growth models. A big enough data set about
measured actual effort and capabilities for a given
ECU would allow a regression analysis for predicting
the effort for similar ECUs. Some more data might be
generated by software growth models, which source
defect trackers and try to predict a software’s later
defect density. Yet, any data set is only valid for a
short time as advances in IT security research and de-
velopment (especially about reverse engineering) may
change the necessary actual effort starkly.
6 CONCLUSION
The method and metric that we presented in this pa-
per shows an approach to a structured evaluation of
the attack surface and the potential vulnerability of
automotive control units. We compiled and assessed
attack surface by collecting input interfaces and es-
timating vulnerability likelihoods, vulnerability find-
ing efforts, attacker finding probabilities for revealing
3
binwalk: http://binwalk.org
4
BAT: http://binaryanalysis.org
Attack Surface and Vulnerability Assessment of Automotive Electronic Control Units
325

a vulnerability and finally an effort estimate for ex-
ploiting found vulnerabilities. We presented an attack
surface taxonomy and definition that can be applied
to the heterogeneous combination of automotive com-
munication channels; We completely abstracted an
ECU’s communication as potential attack surface that
might be susceptible to code injection. We used a vul-
nerability density (ideally for every input channel sep-
arately) for estimating the overall vulnerability likeli-
hood of an ECU. We modelled a concept of reference
attacker profile and attack efforts for an extrapolation
on other, later-defined attacker profiles. Finally, we
gave an attacker effort estimation method for over-
coming active exploit mitigation techniques and suc-
cessfully exploiting an ECU. The result of our method
and metric serves as an input for our graph-based se-
curity analysis. The integration into it was demon-
strated as a proof of concept in Section 3. We thereby
showed that our contribution is not purely academic
but has also an industrial application. The created
method, metric and software helps assessing the se-
curity of embedded controller networks.The metric
implicitly suggests certain ways of securing ECUs:
covering attack surface with firewalls or authentica-
tion checks, shrinking an ECUs attack surface by re-
moving services and inbound data and by harden-
ing attack surface with more secure software (stricter
compiler and programming languages, more defen-
sive programming and exploit mitigation techniques).
The resulting attack surface assessment facilitates a
construction of attack graphs for an overall automo-
tive system security assessment.
Table 2: Symbols Definition.
a ∈ E Access Effort
b ∈ E Basic Exploitation Effort
c ∈ E Counter Exploit-Mitigation Effort
d ∈]0, 1[ Defect Density
e ∈ E Effort E = {(t, r)|t ∈ T ∧ r ∈ R}
f ∈ E Vulnerability Finding Effort
g ∈ E Overall Exploit Creation Effort
i, j ∈ N
>0
A Positive Natural Number
k, n ∈ N
>0
A Positive Natural Number
o ∈ E Overall ECU Exploitation Effort
P Probability Distribution Function
q ∈ [0, 1] Probability
r ∈ R Effort Amount ∈ R
≥0
t ∈ T Capability Tag (a Label)
v ∈]0, 1[ Vulnerability Density
x ∈ R An Arbitrary Real Number
X Probability Random Variable
REFERENCES
Alhazmi, O., Malaiya, Y., and Ray, I. (2005). Security vul-
nerabilities in software systems: A quantitative per-
spective. In Data and Applications Security XIX, num-
ber 3654 in Lecture Notes in Computer Science, pages
281–294. Springer Berlin Heidelberg.
Alhazmi, O. H., Malaiya, Y. K., and Ray, I. (2007). Mea-
suring, analyzing and predicting security vulnerabil-
ities in software systems. Computers & Security,
26(3):219–228.
Charlie Miller and Chris Valasek (2014). A survey of re-
mote automotive attack surfaces.
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., Savage, S., Koscher, K., Czeskis, A.,
Roesner, F., and Kohno, T. (2011). Comprehensive
experimental analyses of automotive attack surfaces.
Proceedings of the 2011 Usenix Security.
Damm, W., Achatz, R., Beetz, K., Broy, M., Daembkes,
H., Grimm, K., and Liggesmeyer, P. (2010). Na-
tionale roadmap embedded systems. In Broy, M., ed-
itor, Cyber-Physical Systems, acatech DISKUTIERT,
pages 67–136. Springer Berlin Heidelberg.
Francillon, A., Danev, B., and Capkun, S. (2010). Relay
attacks on passive keyless entry and start systems in
modern cars. In Proceedings of NDSS.
Howard, M., Pincus, J., and Wing, J. M. (2005). Measuring
relative attack surfaces. In Computer Security in the
21st Century, pages 109–137. Springer US.
Ishtiaq Rouf, R. M., Mustafa, H., Travis Taylor, S. O., Xu,
W., Gruteser, M., Trappe, W., and Seskar, I. (2010).
Security and privacy vulnerabilities of in-car wire-
less networks: A tire pressure monitoring system case
study. In 19th USENIX Security Symposium, Wash-
ington DC, pages 11–13.
Kayaalp, M., Ozsoy, M., Ghazaleh, N., and Ponomarev,
D. (2014). Efficiently securing systems from code
reuse attacks. IEEE Transactions on Computers,
63(5):1144–1156.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno, T.,
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., and Savage, S. (2010). Experimental
security analysis of a modern automobile. In IEEE
Symposium on Security and Privacy, pages 447–462.
Manadhata, P. and Wing, J. (2011). An attack surface
metric. IEEE Transactions on Software Engineering,
37(3):371–386.
Roschke, S., Cheng, F., Schuppenies, R., and Meinel, C.
(2009). Towards unifying vulnerability information
for attack graph construction. In 12th International
Conference on Information Security, ISC 2009, pages
218–233, Berlin, Heidelberg. Springer-Verlag.
Schneier, B. (2012). The importance of security engineer-
ing. IEEE Security & Privacy, 10(5):88–88.
SECRYPT 2015 - International Conference on Security and Cryptography
326
