
Addressing Challenges Beyond Classic Control with Organic Computing
Jan Kantert
1
, Sven Tomforde
2
and Christian M
¨
uller-Schloer
1
1
Institute of Systems Engineering, Leibniz University Hannover, Appelstr. 4, 30167 Hanover, Germany
2
Lehrstuhl f
¨
ur Organic Computing, Augsburg University, Eichleitnerstr. 30, 86159 Augsburg, Germany
Keywords:
Adaptive Control Loop, Organic Computing, Intelligent Control.
Abstract:
The increasing coupling of former isolated systems towards an interwoven complex structure poses questions
about the controllability and maintainability of the corresponding systems. This paper discusses challenges
resulting from the growing complexity of technical systems and derives solution perspectives by utilising
concepts from the domain of self-organising and self-optimising systems, in particular from the Organic Com-
puting and Autonomic Computing initiatives.
1 INTRODUCTION
Nowadays, the nightmare of Ubiquitous Computing
as formulated by Marc Weiser in 1991 (Weiser, 1991)
turns out to become increasingly realistic. Informa-
tion and communication technology (ICT) has be-
come a fundamental part of human lives and supports
us embedded in the environments that we encounter
on a daily basis – it already pervades every aspect of
our lives. Besides the apparent benefits of this in-
clusion, there are several severe drawbacks that en-
tail management and administration complexity. This
raising complexity increasingly results in threatening
outages and failures.
One particular observation fuelling this trend is
the growingly interwoven character of formerly iso-
lated systems: By utilising communication technol-
ogy, distributed systems are tremendously coupled
forming one single complex and interwoven struc-
ture (Tomforde et al., 2014). Especially at this point,
classic control concepts reach their limits. Control-
ling this class of systems demands for novel solutions
dealing with challenges such as coupling of a variety
of systems, self-referential fitness landscapes, relia-
bility and trustworthy issues, or coping with unpre-
dictable behaviour.
In this paper, we discuss how classic con-
trol can be supported and enriched by insights
from initiatives such as Organic Computing
(OC) (M
¨
uller-Schloer, 2004) and Autonomic
Computing (AC) (Kephart and Chess, 2003). We
discuss challenges resulting from the trend towards
interwoven systems and derive solution perspectives
utilising concepts from the Organic Computing
domains.
The remainder of this paper is organised as fol-
lows: Section 2 briefly introduces the field of Organic
Computing. Afterwards, Section 3 discusses chal-
lenges in control theory that need to be addressed in
current and upcoming system development. Finally,
Section 4 describes a solution perspective for these
control problems by utilising concepts from Organic
Computing.
2 ORGANIC COMPUTING
Organic Computing aims to build adaptive and ro-
bust systems which interact in a dynamic environ-
ment. They should be robust against failures and dis-
turbances, flexible in terms of user-originated change
of utility functions and adaptive towards changing en-
vironmental and internal conditions. To achieve this,
OC systems aim to achieve self-x properties, e.g. self-
managing, self-configuring, self-learning, and self-
optimising.
In general, OC postulates to transfer design de-
cisions that are traditionally situated at design-time
to runtime and consequently move them into the re-
sponsibility of systems themselves. As a result, we
face systems that are increasingly autonomous with
decision freedom at different abstraction layers, rang-
ing from pure re-configuration of parameter setting to
adapting the decision models and to finally revising
higher-levelled design decisions.
264
Kantert J., Tomforde S. and Müller-Schloer C..
Addressing Challenges Beyond Classic Control with Organic Computing.
DOI: 10.5220/0005556102640269
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 264-269
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
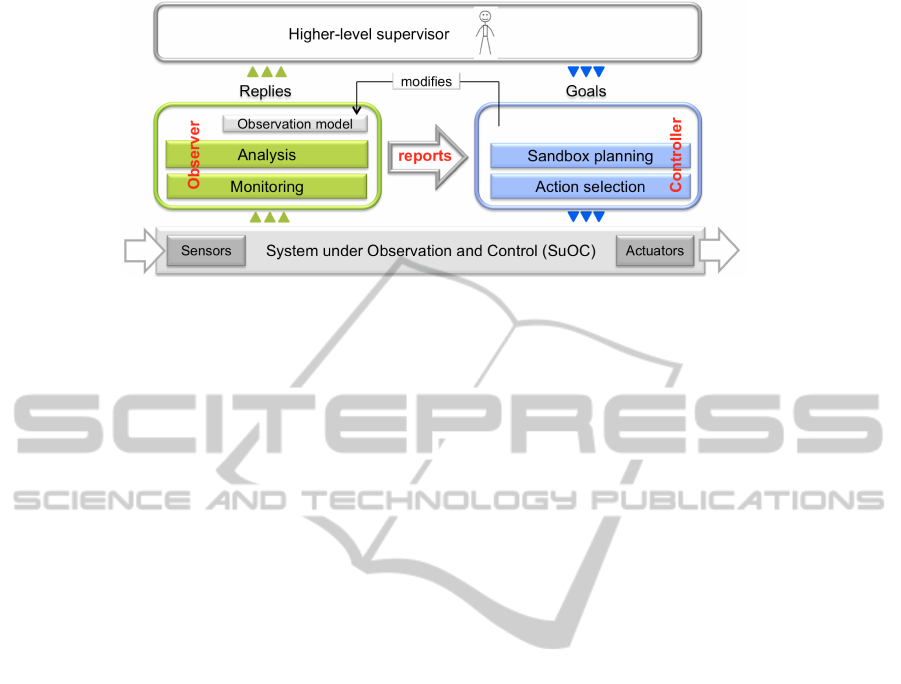
Figure 1: Observer/Controller architecture of an Organic Computing system.
2.1 Observer/Controller
OC systems need to adapt to their environment and,
therefore, consist of an observer and a controller com-
ponent controlling a System under Observation and
Control (SuOC) (see Figure 1). The observer moni-
tors the environment, performs analysis, and reports
a situation description. Based on this knowledge, the
controller runs sandbox planning, and selects actions
to configure the SuOC. The actual work is performed
by the SuOC which gets sensor inputs and performs
simple control tasks. Additionally, the controller su-
pervises the SuOC to match the user’s goal and can
change the observation model to adapt to the current
system state (e.g. at system cold start).
2.1.1 System under Observation and Control
(SuOC)
The System under Observation and Control (SuOC)
is the actual working part. It is connected to external
sensor inputs and controls all actuators hereby form-
ing a classical real-time control loop.
2.1.2 Observer
In an OC system the observer receives the same sen-
sor input as the SuOC. Additionally, it collects status
and performance data from the SuOC itself and may
have access to further high-level information. The ob-
servation process may be modified by the controller
via the observation model. This mechanism can be
used e.g. to focus attention. Based on this infor-
mation, the observer updates its internal observation
data, performs short and long-term predictions and re-
ports these situation descriptions to the controller.
2.1.3 Controller
Based on the situation description, the controller com-
pares the current system state with the goal provided
by the user. However, the goal is not static and can
change during runtime. If situation and goal do not
match the controller can change the configuration of
the SuOC and, thereby, influence the system to ap-
proach the correct state.
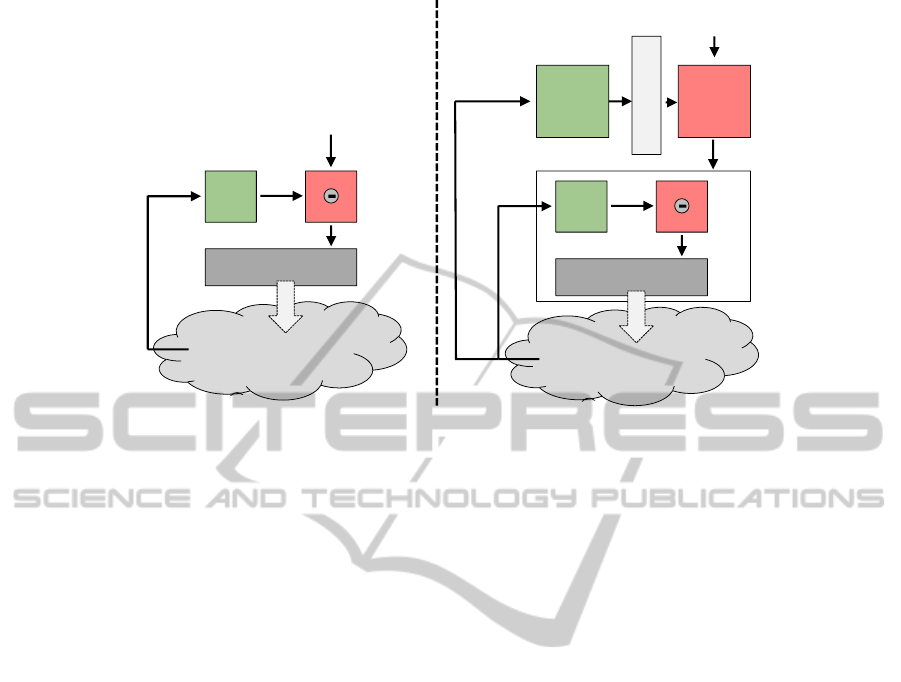
2.2 Differences to Classic Control
Schmeck et al. (2010) described a classic control loop
as a specialised observer/controller. In Figure 2, we
show a classic control loop in observer/controller ter-
minology on the left side and as comparison an ob-
server/controller on the right side. As example, we
use a heating control with temperature sensors and a
heater which should keep a room at a certain tempera-
ture. On the left side, we depict a PID controller as an
observer, which smooths the sensor value, and a con-
troller, which compares the value to the target value
and controls the heater.
On the right side, we show an Organic Comput-
ing system controlling a System under Observation
and Control (SuOC) which actually controls a heater.
Temperature sensor values are monitored and pro-
cessed by both observer and SuOC. On the upper
level, the observer creates a situation description con-
taining the temperature, the observer compares the
situation with the target or goal, and influences the
SuOC if there are any differences. The SuOC will act
based on sensor values and based on influences by the
controller. This structure allows a more robust sys-
tem which can still work with degraded performance
when observer and controller fail. Additionally, the
controller performs short and long-term forecast to
ensure stable control.
In general, Organic Computing systems reach a
goal without an explicit analytic model. Responses to
changes can be learned at runtime and, thereby, adap-
tation to a new environment at runtime is possible.
However, there cannot be a specific control law and
good behaviour cannot be proven. Fortunately, it can
AddressingChallengesBeyondClassicControlwithOrganicComputing
265
Closed loop Observer/Controller
Environment
O C
Situation
O C
Heating
on / off
heat
Environment
O C
Heating
on / off
heat
SuOC
Figure 2: Comparison of closed loop and Observer/Controller architecture.
be shown that OC systems work well in dynamic en-
vironments.
3 CHALLENGES BEYOND
CLASSIC CONTROL
Compared to classic control systems, novel devel-
opments in system engineering raise a set of chal-
lenges that are not addressable by standard control
techniques any more. Within this section, we discuss
the most severe issues.
3.1 Coupling
Intentionally or unintentionally, entities (in the sense
of autonomous subsystems) are coupled to other sys-
tems and the environment. Influences such as the
current status and behaviour of other entities impact
the system’s performance and the available actions.
Thereby, direct and indirect influences are distin-
guished. For direct influences, the subsystems are
aware of each other and their operation within the
same domain. For instance, a shared communica-
tion medium with a neighbourhood cache provides
the basis for such a mechanism. As a result, these
systems can be explicitly modelled and taken into ac-
count within the control law. In contrast, indirect in-
fluences lack the possibility of considering them at
runtime. In this context, indirect means that a system
is either not aware of the other’s existence or it can-
not observe the actions performed by this entity. As
a result, we face mutual influences and dependencies
among entities.
As one example consider a smart household: Pre-
viously independent systems (such as TVs, fridges,
or blinds) are combined forming an integrated system
that adjusts the behaviour of its elements according to
the (estimated) demands of the users. The resulting
solution consists of various devices of different man-
ufacturers – those that were explicitly made for smart
environments are combined with other legacy devices
or systems that have a limited functionality. In addi-
tion, devices will typically rely on varying communi-
cation interfaces (Allerding et al., 2010).
Consider for instance a smart household where the
music and sound system adapts the loudspeaker con-
figuration according to sensor observations that esti-
mate the user’s position. Introducing a novel class of
sensors (e.g. infra-red in addition to movement detec-
tors) might lead to values that are not recognisable
by existing controllers, or these controllers misinter-
pret the readings (i.e. activate sound for pets). Fur-
thermore, interdependencies can be observed – e.g.
between shutters and lighting. The smart household
system is hence a complex of interwoven subsystems
that have to cooperate.
3.2 Unpredictable Behaviour
System engineering typically introduces a “system
boundary” up to which the behaviour is considered
in more detail than outside. Based on these bound-
aries, hierarchies of abstraction layers are formulated.
In current interwoven systems, we face a blurring of
these boundaries – no strict separation of concerns is
feasible any more. This is accompanied by taking
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
266

decisions based on uncertain information
1
. This in-
cludes incomplete, noisy, and not reliable data that
might originate from untrusted or unknown sources
and might be exposed to hidden influences. Further-
more, not all data might be fully accessible and per-
ceivable; for instance, other entities are considered as
black-boxes with unknown status and transfer func-
tions. Finally, delayed effects for executed actions
lead to uncertainty regarding the actual effectiveness
of actions which is accompanied by observations that
are not (or not directly) classifiable to a potential ori-
gin (e.g. in terms of executed actions).
In addition, structure, organisation, and function-
ality of subsystems are subject to changes. Novel en-
tities are joining the system throughout the lifecycle,
others are removed or replaced. Thereby, legacy sys-
tems have to cooperate with those reflecting the up-
to-date standard. In software engineering, such a pro-
cess is already known for isolated entities and to some
degree maintained by updates or patches. As a con-
clusion, we can state that we have to deal with unpre-
dictable behaviour – at structure-level, at information-
level, and at control-level.
3.3 Self-referential Fitness Landscapes
The internal control mechanism of a system (i.e. the
“controller”) is responsible for finding an optimal
control strategy in terms of a given performance met-
ric or utility function. Standard control systems work
on direct feedback by comparing the target output
with a reference and adapting the system’s behaviour
accordingly.
In contrast, OC systems (and consequently a large
set of application systems under construction at the
moment) have to deal with various unpredictable in-
fluences and vast situation spaces. Thereby, we can
observe direct and indirect coupling effects among
distributed systems operating within the same envi-
ronment. In this context, direct coupling refers to ac-
cessible information (i.e. increase heating power leads
to higher room temperature) and indirect coupling
refers to effects that cannot be traced back to certain
actions and might originate from other systems.
Standard systems are characterised by a static,
continuous fitness landscape. Such a fitness land-
scape is an objective function defined as the map-
ping of configuration settings on certain performance
values for all possible configurations – the con-
1
The term uncertainty is used according
to Motro and Smets (1997). There, “uncertain” is a
generic term for other terms such as “likely”, “doubtful”,
“plausible”, “reliable”, “imprecise”, “inconsistent”, or
“vague”.
troller’s task is to find the optimal point in this land-
scape. Controllers can also react to slowly chang-
ing fitness landscapes by adapting the control law
over time (e.g. as response to burning fuel in aero-
planes). For OC systems, the fitness landscape is
even more complex. The own configuration im-
pacts the objective function’s shape – meaning that
changing the configuration towards a current opti-
mum influences the mapping of configuration to per-
formance values. The resulting fitness landscapes of
the underlying optimisation problem are called “self-
referential” (Cakar et al., 2011). Depending on the
time constants of the involved processes, such cou-
pled systems can become unstable. The highly auto-
mated stock trading system is an example.
3.4 Vast Situation and Configuration
Spaces
The “self-referential” properties of the fitness land-
scape are even worsened due to vast situation and
configuration spaces and the resulting unpredictabil-
ity of conditions at runtime. With the term situation
space we refer to all potentially occurring conditions
the system will be exposed to at runtime. In contrast,
the configuration space comprises all available set-
ting of the SuOC, i.e. parameter configurations that
are typically altered by the controller at runtime as re-
sponse to non-fulfilled target values. In classical sys-
tems engineering, development processes build and
test systems at run-time against a set of pre-defined
requirements and test data. Interconnectedness and
interactions during operation, however, introduce dy-
namic conditions that cannot be anticipated at design-
time. This means that an engineer is not able to search
the complete situation and configuration spaces in ad-
vance.
For instance, consider the smart household sce-
nario again. Devices might be replaced by novel so-
lutions at runtime, or additional equipment might be
installed. The effective control strategy of an indi-
vidual device cannot be tested together with another
solution that is not even invented at the same time.
Furthermore, the law of combinatorics suggests that
searching the configuration space for an optimal set-
ting (neglecting the challenges of self-referential fit-
ness landscape for a moment) is increasingly hard
(and mostly impossible) if many devices have to co-
operate. Hence, we have to accept the fact that sys-
tems cannot be brought to operation with a configu-
ration that has been optimised once and remains con-
stant.
AddressingChallengesBeyondClassicControlwithOrganicComputing
267

3.5 Open Systems and Trustworthiness
In general, faulty systems, actuators or sensors pose
a challenge for reliable control. However, they can
be detected in some control loops which is typically
performed using fixed strategies, e.g. when a sensor
value does not change any more at all or returns to-
tally invalid values. Unfortunately, this changes when
systems become open. Now, intruding components
may behave intentionally maliciously. For example
an attacker may exploit a heater by tampering some
temperature sensors, let them return a very low tem-
perature value and the room would get overheated.
However, with a reasonable system model taking into
account some context knowledge such as outside tem-
perature and historical values this “attack” could be
detected and mitigated.
OC systems typically do not assume any benev-
olence of components and have to cope with uncer-
tainties according to sensor values or the effect of ac-
tions taken by the controller or SuOC. Therefore, they
validate the trustworthiness of components and mea-
surements and, thereby, can prevent such attacks or
at least recover from them. Additionally, a learning
OC system may memorise historical attacks to defend
against them in the future (Stegh
¨
ofer et al., 2010).
4 SOLUTION PERSPECTIVES
Based on the challenges introduced in the previous
section, the remainder of this paper proposes a solu-
tion perspective. We highlight what insights from the
OC domain can be utilised to allow for controlling in-
terwoven systems.
4.1 Self-observation
Mastering complex behaviour (e.g. as result of cou-
pling) requires an appropriate description of the cur-
rent conditions in the first place. This includes local
information (i.e. the status of the entity, its goals, and
the decision options), available other resources to in-
teract with in combination with their estimated status
and reliability, and environmental conditions, both ac-
cessible values and estimated inaccessible values.
4.2 Self-modelling
Based on the perceived information, each entity has
to develop a model of the current status; again in-
cluding the view on itself, others, and the environ-
ment. These models have to reflect the estimated re-
liability of the underlying information sources, the
trust towards other entities, and the entity’s goal
(or current chain of goals). Here, concepts such
as Models@Runtime (Assmann et al., 2011) can be
utilised that allow for a runtime usage of design
models. Furthermore, trust and reliability tech-
niques (Stegh
¨
ofer et al., 2010) can be applied to esti-
mate the potential benefits and drawbacks of interac-
tion partners. The research field of Models@Runtime
started with the motivation that model-driven engi-
neering processes generate varying models at design-
time which are not further used at the system’s run-
time. Hence, possibilities to extend the applicabil-
ity of models and abstractions during operation of
the system under development are investigated. The
motivation of the conducted research is to find ways
for providing effective technologies for mastering and
managing the complexity of evolving software be-
haviour. Thereby, not just the design-time but also
the runtime aspects can be taken into account making
solutions more appropriate (Assmann et al., 2011).
Since Models@Runtime is a very heterogeneous ini-
tiative, several concepts from different fields (such as
model-driven development processes, requirements
engineering, or validation and verification) can serve
as input to investigate self-reflective systems. Espe-
cially work on the generation of behavioural models
for dynamic adaptive systems (Goldsby and Cheng,
2008) provides a good starting point.
4.3 Self-adaptation of Behaviour
According to the derived models, each entity has to
adapt its own behaviour. Thereby, we distinguish
between behaviour (i.e. local processes performed
by the entity itself that are influenced by configu-
ration parameters) and structure from a systems en-
gineering point of view (i.e. connections with other
entities). For the behaviour aspect, safety-oriented
learning techniques such as developed within Organic
Computing (Tomforde et al., 2011) provide a basis.
4.4 Self-management of System
Structure
Besides the own behaviour, the entity has to decide
about its position within the overall structure. This
means it has to establish and remove relations to
other entities – which is again based on the obser-
vations and, consequently, on reliability and trust,
on performance estimations, and on quality mea-
surements with respect to further influencing factors
such as redundancy, latency, or ownership of the
possible interaction partner. Furthermore, the de-
rived models might indicate indirect coupling effects
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
268

with other entities (where no direct relation exists)
which might not be desired and therefore avoided.
For explicit dependencies, the knowledge models of
Organic Computing systems have been mostly ade-
quate, since self-learning systems can find such re-
lations based on e.g. reinforcement learning tech-
niques (Sutton and Barto, 1998). For implicit de-
pendencies, methods to model dependencies between
randomised variables are needed. For instance, risk
measures (McNeil et al., 2005) from Operational Re-
search or copula models (Nelsen, 1998) can be used.
Current research effort works towards self-integrating
techniques that merge design-time and runtime pro-
cesses (Bellman et al., 2014).
4.5 Self-optimisation
Finally, all the previous steps are performed on the
basis of a currently active configuration that serves as
general decision guideline. This is subject to a higher-
level process that tries to self-optimise all the under-
lying self-x processes. Thereby, applied reinforce-
ment techniques provide the first step towards self-
optimisation – a further step is to integrate suitable
search heuristics (Cakar et al., 2011).
In contrast to state-of-the-art model-based con-
trollers that work on static and design-time-based
models, we need capabilities to automatically de-
rive and maintain models at runtime (Niemann et al.,
2013).
5 CONCLUSION
Current and future technical systems show increas-
ingly interwoven characteristics. This leads to novel
challenges regarding their controllability. Based on
this observation, this paper discussed challenges re-
sulting from the interwoven character and outlines so-
lution strategies based on Organic Computing tech-
niques. We derive five key enablers to counter com-
plexity issues and outlines how classic control con-
cepts can be enriched to provide sufficient and stable
feedback mechanism that can deal with interwoven
systems.
REFERENCES
Allerding, F., Becker, B., and Schmeck, H. (2010).
Integration intelligenter Steuerungskomponenten in
reale smart-home-Umgebungen. In Informatik 2010:
Service Science - neue Perspektiven f
¨
ur die Infor-
matik, volume 1, pages 455 – 460, Bonn, Germany.
Gesellschaft f
¨
ur Informatik. ISBN978-3-88579-269-7.
Assmann, U., Bencomo, N., Cheng, B., and France,
R. (2011). Models@run.time. Dagstuhl Reports,
1(11):91 – 123.
Bellman, K. L., Tomforde, S., and W
¨
urtz, R. P. (2014).
Interwoven systems: Self-improving systems integra-
tion. In Eighth IEEE International Conference on Self-
Adaptive and Self-Organizing Systems Workshops,
SASOW 2014, London, United Kingdom, September 8-
12, 2014, pages 123–127.
Cakar, E., Tomforde, S., and M
¨
uller-Schloer, C. (2011). A
Role-based Imitation Algorithm for the Optimisation
in Dynamic Fitness Landscapes. In Swarm Intelli-
gence (SIS), 2011 IEEE Symposium on, pages 139 –
146. IEEE.
Goldsby, H. J. and Cheng, B. (2008). Automatically Gener-
ating Behavioural Models of Adaptive Systems to Ad-
dress Uncertainty. In Proc. of Model Driven Engineer-
ing Languages and Systems. 11th International Con-
ference, MoDELS 2008, Toulouse, France, Septem-
ber 28 - October 3, LNCS 5301, pages 568 – 583.
Springer.
Kephart, J. and Chess, D. (2003). The Vision of Autonomic
Computing. IEEE Computer, 36(1):41–50.
McNeil, A. J., Frey, R., and Embrechts, P. (2005). Quantita-
tive risk management: concepts, techniques and tools.
Princeton University Press.
Motro, A. and Smets, P. (1997). Uncertainty Management
in Information Systems – From Needs to Solutions.
Springer Verlag.
M
¨
uller-Schloer, C. (2004). Organic Computing: On the Fea-
sibility of Controlled Emergence. In Proc. of CODES
and ISSS’04, pages 2–5. ACM Press.
Nelsen, R. (1998). An Introduction to Copulas (Lecture
Notes in Statistics). Springer, New York, NY, USA.
Niemann, S., Kotlarski, J., Ortmaier, T., and M
¨
uller-Schloer,
C. (2013). Reducing the Optimization Problem for
the Efficient Motion Planning of Kinematically Redun-
dant Parallel Robots. In Proceedings of the Interna-
tional Conference on Advanced Intelligent Mechatron-
ics (AIM), pages 618–624. IEEE/ASME.
Schmeck, H., M
¨
uller-Schloer, C., C¸ akar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and self-organization in
organic computing systems. ACM Trans. Auton. Adapt.
Syst., 5:10:1–10:32.
Stegh
¨
ofer, J.-P., Kiefhaber, R., Leichtenstern, K., Bernard,
Y., Klejnowski, L., Reif, W., Ungerer, T., Andr
´
e, E.,
H
¨
ahner, J., and M
¨
uller-Schloer, C. (2010). Trustwor-
thy Organic Computing Systems: Challenges and Per-
spectives. In Proc. of ATC 2010, pages 62–76, Boston,
MA. Springer.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. Adaptive Computation and Ma-
chine Learning. MIT Press, Cambridge, MA, US.
Tomforde, S., H
¨
ahner, J., and Sick, B. (2014). Interwoven
Systems. Informatik-Spektrum, 37(5):483–487. Ak-
tuelles Schlagwort.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and Control of Organic Systems.
In Organic Computing - A Paradigm Shift for Complex
Systems, pages 325 – 338. Birkh
¨
auser, Basel, CH.
Weiser, M. (1991). The computer for the 21st century. Sci-
entific American, 265(3):66–75.
AddressingChallengesBeyondClassicControlwithOrganicComputing
269
