
Salient Foreground Object Detection based on Sparse Reconstruction
for Artificial Awareness
Jingyu Wang
1
, Ke Zhang
1
, Kurosh Madani
2
, Christophe Sabourin
2
and Jing Zhang
3
1
School of Astronautics, Northwestern Polytechnical University, Xi’an, China
2
Signals Images & Intelligent Systems Laboratory (LISSI/EA3956), Université Paris-Est, Paris-Lieusaint, France
3
School of Electronics and Information, Northwestern Polytechnical University, Xi’an, China
Keywords: Foreground Object Detection, Informative Saliency, Sparse Representation, Reconstruction Error, Artificial
Awareness.
Abstract: Artificial awareness is an interesting way of realizing artificial intelligent perception for machines. Since the
foreground object can provide more useful information for perception and informative description of the
environment than background regions, the informative saliency characteristics of the foreground object can
be treated as a important cue of the objectness property. Thus, a sparse reconstruction error based detection
approach is proposed in this paper. To be specific, the overcomplete dictionary is trained by using the image
features derived from randomly selected background images, while the reconstruction error is computed in
several scales to obtain better detection performance. Experiments on popular image dataset are conducted
by applying the proposed approach, while comparison tests by using a state of the art visual saliency
detection method are demonstrated as well. The experimental results have shown that the proposed
approach is able to detect the foreground object which is distinct for awareness, and has better performance
in detecting the information salient foreground object for artificial awareness than the state of the art visual
saliency method.
1 INTRODUCTION
Due to the perception importance and distinctive
representation of visual information, it dominates the
perceptual information acqusited from environment.
Thus, visual object detection plays a vital role in the
perception process of the surrounding environment
in our lives. Since machines that with certain level
of intelligence have been frequently depolyed in the
dangerours or complex environment to accomplish
complicate tasks instead of human beings more than
ever before, the accuracy and efficiency of visual
channel perception is extremely crucial and highly
important. However, as image requires much more
resource for higher level processing, it is difficult
and practically impossible for artificial machines to
exhaustively analyze all the image data.
As human perception is such a sophisticated and
purely biological process, only some features of the
phenomenal world have been tentatively modeled or
even implemented in robotic systems (Fingelkurts,
2012). Alternatively, an interesting way of achieving
human-like intelligent perception has been proposed
as a lower level and preliminary stage of artificial
consciousness, which is known as awareness (Ramík,
2013).
According to the discussion of (Reggia, 2013),
the artificial conscious awareness or the information
processing capabilities associated with the conscious
mind would be an interesting way, even a door to
more powerful and general artificial intelligence
technology. However, very little work has been done
to realize the awareness ability in machines. The
difficulty is that current approaches always focus on
the computational model of information processing,
while the human awareness characteristic is hard to
be simulated.
From the perspective of human visual awareness,
it is obvious that we always intend to focus on the
most informative region or object in an image in
order to efficiently analyze what we have observed.
This biological phenomenon is known as the visual
saliency and has been well researched for years.
Compared to the background regions, the foreground
objects in an image contain more useful and unique
informative cues in the perceptual process from the
perspective of visual perception, which means that
the foreground object is considered to be informative
430
Wang J., Zhang K., Madani K., Sabourin C. and Zhang J..
Salient Foreground Object Detection based on Sparse Reconstruction for Artificial Awareness.
DOI: 10.5220/0005571204300437
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 430-437
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

salient. It is the perceptual awareness that makes the
foreground objects more interesting and valuable, so
that they can be treated as informative salient by
human beings. Therefore, the detection of salient
foreground object is a crucial and fundamental task
in realizing the intelligent awareness for artificial
machines.
From object detection point of view, foreground
objects can be either salient or non-salient to human
vision (see Figure 4 in Section 4.2). However, the
foreground object has informative saliency features
compared to the background region. Thus, novel
approach that can detect the saliency property of
foreground object in information level is required to
mimic the human awareness characteristic. The rest
part of this paper is organized as follows. Section 2
briefly introduces and discusses the state of the art of
related works. Section 3 describes the proposed
detection approach in detail. Section 4 demonstrates
the experiment setup and gives results, while the
discussion and comparison are presented afterwards.
Section 5 summarizes the conclusions.
2 RELATED WORKS
Traditional visual saliency detection approaches
have been well researched and can be generally
illustrated into local and global schemes. Most of
them are based on the centre-surround operator,
contrast operator as well as some other saliency
features. Since these features are mostly derived in
pixel level from image, the intrinsic information of
object such as objectness is rarely taken into account.
As a result, the detected salient regions could not
cover the expected objects in certain circumstances,
especially when multiple objects exist or the objects
are informative salient.
In the research work of (Wickens and Andre,
1990), the term of objectness is characterized as the
visual representation that could be correlated with an
object, thus an objectness based visual object shape
detection approach is presented. The advantage of
using objectness is that, it can be considered as a
generic cue of object for further processing, which is
the way more like the perceptual characteristic of
our visual perception system. Notably, in (Alexe et
al., 2010) and (Alexe et al., 2012) the objectness is
used as a location prior to improve the object
detection methods, the yielded results have shown
that it outperforms many other approaches, including
traditional saliency, interest point detector, semantic
learning as well as the HOG detector, while good
results can be achieved in both static images and
videos. Thereafter, in the works of (Chang et al.,
2011), (Spampinato et al., 2012) and (Cheng et al.,
2014) the objectness property is used as the generic
cue that to be combined with many other saliency
characteristics to achieve a better performance in
salient object detection, the experimental results of
which have proved that objectness is an important
property as well as an efficient way in the detection
of objects and can be applied to many object-related
scenarios. Therefore, it is worthy of researching the
approach of detecting information salient foreground
objects by measuring objectness and conduct it in an
autonomous way. Moreover, inspired by the early
research of (Olshausen and Field, 1997) which
revealed the biological foundation of sparse coding,
researches of (Mairal et al., 2008) and (Wright et al.,
2009) have shown that the sparse representation is a
powerful mathematical tool for representing and
compressing high dimensional signal in computer
vision, including natural image restoration, image
denoising and human face recognition.
In (Ji et al., 2013), a foreground object extraction
approach is proposed for analyzing the image of
video surveillance, in which the background region
is represented by the spatiotemporal spectrum in 3D
DCT domain while the foreground object pixels are
identified as an outlier of the sparse model of the
spectrum. By updating the background dictionary of
sparse model, the dissimilarity between background
and foreground can be measured and the foreground
object can be extracted. Experiment on video frames
shows a good performance of the proposed approach,
however, the images only contain simple foreground
object and the objectness property is not taken into
account. Meanwhile, (Sun et al., 2013) proposed an
automatic foreground object detection approach, in
which the robust SIFT trajectories are constructed in
terms of the calculated feature point probability. By
using a consensus foreground object template, object
in the foreground of video can be detected. Despite
that the experiment results derived from real videos
have proved the effectiveness of proposed approach,
the applied objects are in a close-up scene and are
both informative salient and visually salient, which
limits its application in real world.
Recently, (Biswas and Babu, 2014) proposed a
foreground anomaly detection approach based on the
sparse reconstruction error for surveillance, in which
the applied enhanced local dictionary is computed
based on the similarity of usual behavior with spatial
neighbors in the image. The experiment results have
shown better detection performance compared to the
traditional approaches, which indicate that the error
of sparse reconstruction can represent the objectness
SalientForegroundObjectDetectionbasedonSparseReconstructionforArtificialAwareness
431
property of foreground objects that are informative
salient and describe the perceptual informative
dissimilarity between foreground and background.
As motivated before, a reconstruction error based
salient foreground object detection approach is
proposed in this paper. Different from other works,
we propose to use the informative saliency instead
of visual saliency. To be specific, the informative
saliency is described as the objectness property and
measured by the sparse reconstruction error. The
foreground object with salient informative meaning
is detected by calculating the reconstruction error of
the feature matrix over an overcomplete background
dictionary which describes the dissimilarity between
object and background. Since the theoretical basis
and derivation of sparse representation has been well
studied, the detailed introduction of sparse coding is
omitted while the illustrations of key components of
our approach will be given in detail.
3 SALIENT FOREGROUND
OBJECT DETECTION
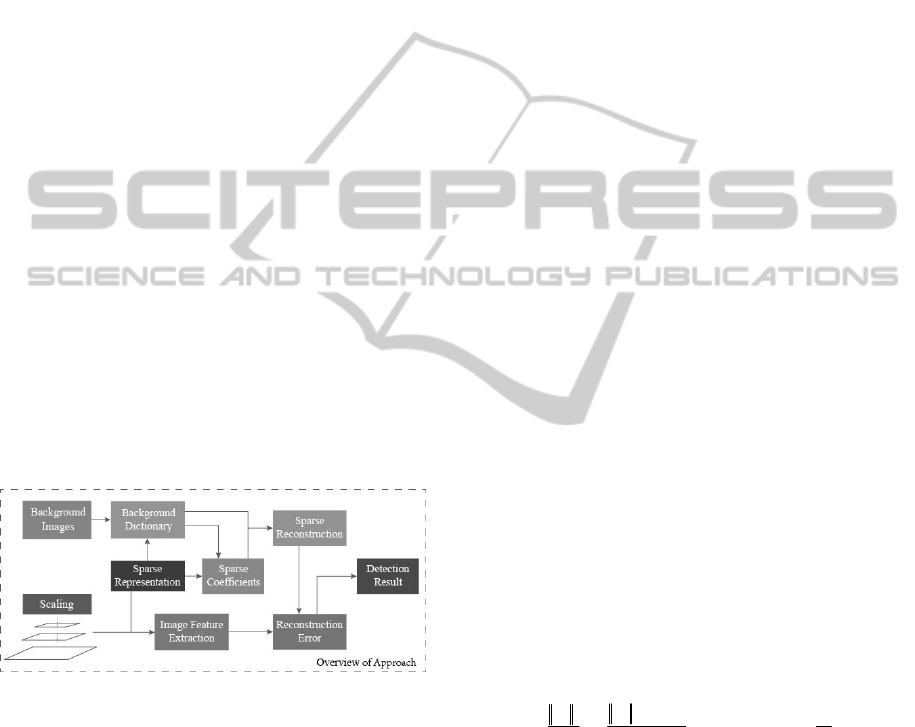
3.1 Overview of Approach
In general, the proposed approach in this paper
consists of two stages which are the learning of
background dictionary and the sparse reconstruction
error computation in different scales, respectively.
Figure 1: The overview of proposed detection approach, in
which the blue arrow indicates the procedure of processing.
To be specific, foreground objects are considered
to be much more informative salient with respect to
the background region, as the foreground objects are
more interesting and informative salient to human
awareness than the background. The overview of the
proposed approach is illustrated in Figure 1.
As demonstrated in Fig. 1, the visual image of
the environment will be processed in different scales,
the goal of which is to cover objects with different
sizes. Notably, to simplify the question, the objects
with ordinary and fixed sizes are considered in this
paper. The dictionary is pre-learned by using a set of
background images, while the Gabor features of
input image are obtained.
Thereafter, the sparse coefficients are computed
and used to generate the reconstruction feature
vector. Finally, the errors of sparse reconstruction
will be calculated between the original Gabor
features and the reconstructed Gabor features, which
indicate the informative saliency of local image
patches in different scales. By assigning a threshold
of reconstruction error, the patches with error value
larger than the threshold are the potential locations
of informative salient foreground regions.
The contribution of our work is the using of the
reconstruction error, which is computed between the
input and reconstructed image feature matrix. Since
sparse decomposition is an optimal approximation,
the reconstructed feature could be slightly different
from the input feature vector, due to the dissimilarity
of objectness between the foreground objects and
background. Consequently, the sparse reconstruction
error is applied as the representation of informative
salient foreground object for awareness.
3.2 Sparse Reconstruction
3.2.1 Image Feature Extraction
Since the kernel of Gabor filters is believed to be a
good model that similar to the receptive field
profiles of cortical simple cells (Hubel and Wiesel,
1968), Gabor filter is used to capture the local
feature of image in multiple frequencies (scales) and
orientations due to its good performance of spatial
localization and orientation selection. The two-
dimensional Gabor function can therefore enhance
the features of edge, peak and ridge and robust to
illumination and posture to a certain extent.
Considering the statistic property of image, the
kernel of Gabor function can be defined as (Liu and
Wechsler, 2002)
()
()
2
2
22
2
,
,
,,
22
, exp (exp( )- exp )
22
uv
uv
uv uv
kxy
k
x
xy ik
y
σ
ψ
σσ
+
=⋅⋅−
−
(1)
where u and v represent the orientation and scale of
the Gabor kernels, x and y are the coordinates of
pixel location, ||·|| denotes the norm operator and σ
determines the ratio of the Gaussian window width
to wavelength. Particularly, the wave vector k
u,v
is
defined as follows
,
u
i
uv v
kke
φ
=
(2)
where k
v
=k
max
/f
s
v
and ϕ
u
=πu/8 , in which k
max
is the
maximum frequency and f
s
is the spacing factor
between kernels in the frequency domain. By using
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
432
different values of u and v, a set of Gabor filters with
different scales and orientations can be obtained.
Meanwhile, the Gabor features of an image are
the convolution of the image with a set of Gabor
filters in the filter bank which defined by Eq.(1). The
formulation of the Gabor feature derived from the
image I(x,y) can be defined as
G
u,v
(x,y)=I(x,y)
*
ψ
u,v
(x,y) (3)
where G
u,v
(x,y) is the Gabor feature of image I(x,y)
in orientation u and scale v, the * symbol represents
the convolution operator.
As foreground objects in the environment are
mostly regular in shape and contour, thus the scale
parameters is set to be 3 so as to cover objects with
different sizes in 3 scales, and the orientation is set
to be 2 to obtain the Gabor features of vertical and
horizontal axes.
3.2.2 Background Dictionary Learning
Considering the general problem model of sparse
representation, the sparse representation of a column
signal
n
x ∈R with the corresponding overcomplete
dictionary
nK
D
×
∈ R
, in which the parameter K
indicates the number of dictionary atoms, can be
described by the following sparse approximation
problem as
0
min
α
α
subject to
2
xD
αε
−≤
(4)
where ||·||
0
is the l
0
-norm which counts the nonzero
entries of a vector, α is the sparse coefficient and ε is
the error tolerance.
According to the research work of (Davis et al.,
1997), the extract determination of the sparsest
representation which defined in Eq.(4) has been
known as a non-deterministic polynomial (NP) -hard
problem. This means that the sparsest solution of
Eq.(4) has no optimal result but trying all subsets of
the entries for signal x which could be computational
unavailable.
Nevertheless, researches have proved that if the
sought solution x is sparse enough, the solution of
the l
0
-norm problem could be replaced by the
approximated version of the l
1
-norm as
1
min
α
α
subject to
2
xD
αε
−≤
(5)
where ||·||
1
is the l
1
-norm. The similarity in finding
sparse solution between using the l
1
-norm and the l
0
-
norm has been supported by the work of (Donoho
and Tsaig, 2008).
Current dictionary learning methods can be
categorized into two kinds based on the discussion
in (Rubinstein et al., 2010), which are the analytic
approach and the learning-based approach. The first
approach refers to the dictionaries which generated
from the standard mathematical models, such as
Fourier, Wavelet and Gabor, to name a few, which
have no informative meaning correlate to the natural
images.
On the other hand, the second approach uses
machine learning based techniques to generate the
dictionary from image examples. Therefore, the
obtained dictionary could represent the examples in
a close manner. Compared to the first approach
which prespecifies the dictionary atoms, the second
way is an adaptation process between the dictionary
and examples from the machine learning
perspective. Although the analytic dictionary is
simple to be implemented, the learning-based
dictionary has a better performance in image
processing.
Considering the requirement of our work, the
dictionary learned based on image examples is used
to provide informative description of the background
image. In this paper, we simply apply a frequently
used dictionary learning algorithm that described in
(Aharon, 2006) to generate the sparse atoms of the
overcomplete dictionary.
Figure 2: The learned background dictionary in gray scale.
Thus, the dictionary D is used to represent the
image features of background regions. By using the
dictionary, sparse coding is able to approximately
represent the input features as a linear combination
of sparse atoms. Particularly, the gray scale image of
learned background dictionary is shown in Figure 2,
in which the sequence of local image patch indicates
the visualization representation of dictionary atom.
3.2.3 The Computation of Reconstruction
Error
When the aforementioned background dictionary D
has been learned, the objectness property of
foreground object can be obtained by calculating the
reconstruction error of input feature vector derived
from a detection window over the learned
SalientForegroundObjectDetectionbasedonSparseReconstructionforArtificialAwareness
433

dictionary. The underlying assumption of this
approach is that, as the representation of a local
image patch, each local feature vector contains the
objectness property.
Meanwhile, objectness is characterized here as
the dissimilarity between input feature vector and
background dictionary. By using the obtained sparse
representation coefficients α of a feature vector
generated from the dictionary, the reconstructed
feature vector can be restored by applying an inverse
operation of sparse decomposition. However, since
the reconstructed feature vector derived from sparse
coding is the approximation of the original feature
vector, a reconstruction error between these two
vectors can be calculated to indicate the dissimilarity
between the current local image patch and the
background image. Thus, the objectness property of
each detection window could be measured for
foreground object detection.
Assume x
i
, i=1,…,N is the corresponding feature
vector for i
th
local image patch, the sparse coefficient
can be computed by coding each x
i
over the learned
dictionary D based on the l
1
-minimization as
1
min
α
α
subject to
x
D
α
=
(6)
In order to obtain the sparse coefficient α, many
decomposition approaches have been proposed so
far and proved to be effective, such as Basis Pursuit
(BP), Matching Pursuit (MP), Orthogonal Matching
Pursuit (OMP) and Least Absolute Shrinkage and
Selection Operator (LASSO).
Considering the computational cost and the
requirement of research goal, the LASSO algorithm
(Tibshirani, 1996) is applied to compute the sparse
coefficients α of the input feature vector. Thus, the
reconstructed feature vector
ˆ
x
can be calculated
based on the sparse coefficients as
ˆ
x
D
α
=
(7)
Since
ˆ
x
is the approximation solution result of
x, the reconstruction error can be quantitatively
given as
22
22
ˆ
xx xD
εα
=− =−
(8)
where
2
2
⋅ denotes the Euclidean distance.
Particularly, as the input image is processed in
multiple scales to reveal the characteristics of object
in different sizes, the input feature vector x
i
of each
scale will be evaluated differently as
{
}
,1,2,3
j
j
s
fo i s
j
εερ
=∀> =
(9)
where ε
i
denotes the reconstruction error of i
th
local
image patch in each scale and ε
fo
represents the set
consists of reconstruction errors ε
i
Sj
that larger than
the error threshold of ρ
Sj
in S
j
scale. Thus, the
information salient object can be extracted by
finding the detection window which indicated by ε
fo
.
4 EXPERIMENTAL RESULTS
To validate the effectiveness of the proposed
approach, natural images taken from real world
including both outdoor and indoor environment are
applied. The object images of clock, phone, police
car, bus and tree are chosen to generate the
experiment dataset. To compare the performance of
proposed approach with the state of the art visual
saliency detection approach, the method proposed by
(Perazzi et al., 2012) is used to obtain the visual
saliency detection results.
4.1 Experimental Setup
In general, the clock, phone and the white box
underneath the phone are the expected foreground
objects in the test images of indoor environment,
while the police car, bus and tree are considered to
be informative salient and are the expected objects
in outdoor environment. To ensure the quality and
resolution of the test images can represent the actual
requirement of real world, the images of clock and
phone are taken in a typical office room, while the
images of police and bus are randomly selected from
the Internet via Google.fr. There are 150 pictures
which randomly chosen from internet with different
colors and shapes for training the dictionary. The
pictures rarely have foreground objects and are taken
from ordinary environments which can be
commonly seen in human world. The learning
process is conducted on the laptop with Intel i7-
3630QM cores of 2.4 GHz and 8 GB internal storage,
100 iterations are deployed as a compromise of time
and computational cost.
Notably, other objects that are simultaneously
appeared in the pictures which could be treated as
interferences, while some of which are also visual
salient to human visual perception.
4.2 Results and Discussion
In Figure 3, the visual saliency images derived from
the approach of (Perazzi et al., 2012) are given as in
the first row, while detection results of the
information salient foreground objects by applying
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
434

visual saliency method and proposed approach are
shown in the second and third row, respectively.
The second images from Figure 3(a) and 3(c) of
Figure 4 show that, visually salient objects could be
detected while informative salient foreground object
can not be located, such as the clock in Figure 3(a)
and the car under the tree in Figure 3(c). Though this
could has little influence to the further processing
while the salient foreground object is not the
expected object, such as the car under the tree in
Figure 3(c), it still could lead to a failure in potential
further processing, such as object classification.
Figure 3: The salient foreground objects detection results
of (a) clock, (b) phone and (c) police car, bus and tree.
The images in the third row from both Figure 3(a)
and 3(c) have shown that, all the salient foreground
objects could be covered with at least one detection
window. Particularly, both of the expected objects of
clock and phone are detected by using objectness
based approach as shown in the last image of Figure
3(a), and the detection windows in the last image of
Figure 3(c) are more close to the expected police car
compare to the visual saliency detection results in
the third image of Figure 3(c). Particularly, the
detection windows in Figure 3(c) can also cover the
tree that in the foreground. These two examples have
shown that the proposed method is able to detect the
informative salient foreground objects successfully,
when the expected objects are not visually salient.
Meanwhile, a set of test images that consists of a
visually salient object of phone is given in Figure
3(b). Though the image from second row of Figure
3(b) shows that the result of using visual saliency
detection approach is correct in detecting the phone,
but the white box can not be fully covered by the
detection window. However, better detection result
that the entire box and phone can be located by the
detection window by using the proposed as shown in
the last image of Figure 3(b). Nevertheless, there are
still some mismatched detection windows exist in
the results obtained by using proposed approach, the
explanation for this limitation is that only a small
number (N=150) of background images are applied
in our work to train the background dictionary. Thus,
the dictionary is not well constructed based on the
experimental data and not all the background images
can be comprehensively represented by the learned
dictionary. In fact, informative boundary between
background and foreground is ambiguous and even
subjectively different according to the differentials
in visual perception system of different people.
Figure 4: The foreground objects detection results of three
test images.
Furthermore, to compare the performances of
both visual saliency method and proposed method,
the detection results derived from the frequently
used PASCAL VOC2007 dataset (Everingham et al.,
2008) are shown in Figure 4 to show the importance
of using the objectness property as the informative
saliency feature in foreground object detection. In
Figure 4, three example images from both indoor
and outdoor environments have been given to
demonstrate the differential detection results. To be
specific, the original images, saliency maps and
detection results are shown in the first, second and
third row, respectively. It can be seen from the
original images that informative salient foreground
object with respect to the awareness characteristic in
each test image can be illustrated as: two sheep in
Figure 4(a), chairs and small sofas in Figure 4(b)
and the computer with keyboard in Figure 4(c).
SalientForegroundObjectDetectionbasedonSparseReconstructionforArtificialAwareness
435

The visual saliency detection results in the
second row of Figure 4 have shown that, the salient
regions in Figure 4(a) represent the grass with green
color behind the sheep and a small part (i.e. legs) of
one sheep (i.e. left) while the majority of the two
sheep have not been detected as salient objects; the
most salient objects detected in Figure 4(b) are the
door and ceiling of the room with dark color which
are less interesting as they can be considered as
backgrounds, another salient region represents the
table which masked by the chairs and all the chairs
have not been correctly detected. The middle image
from Figure 4(c) shows that the blue part of
computer screen has been detected as salient region,
while the entire computer and the keyboard are the
expected salient foreground objects. Therefore, the
result images from the second row have shown that
the visual saliency detection could not extract the
expected foreground objects when the objects are
not visually salient but informative salient.
The detection results by using proposed method
of three test images are shown in the third row of
Figure 4, in which the red windows with different
size are detection windows used in different scales.
It can be clearly seen from the result images that,
despite there are a few mismatched windows that
located in the background, such as the wall in Figure
4(b), the majority of all the detection windows can
correctly include the expected foreground objects.
Since the objects within the detection windows will
be considered as the candidates of foreground
object, windows which only cover a small part of the
object will not affect the further classification
process as long as the objects are covered by large
windows.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, a novel foreground object detection
approach for information salient foreground object is
proposed based on the sparse reconstruction error.
Regarding the generic characteristic of foreground
object, the objectness property is characterized as
informative salient. In order to detect the interesting
foreground objects for artificial awareness, a sparse
representation based method is initially presented to
obtain the objectness feature of object different from
other approaches. To be specific, the objectness of
salient foreground object is obtained by calculating
the dissimilarity between the object feature and the
background dictionary based on the reconstruction
error. Experiment results derived from the popular
VOC2007 dataset show that, the proposed approach
of using reconstruction error can correctly detect the
informative salient foreground objects when visual
saliency detection fails, which demonstrates the
effectiveness of proposed approach.
The experimental results conducted on the real
world images have shown that, the performance of
proposed approach is quite competitive in detecting
salient foreground object. Despite that mismatched
detection window could exist in the background,
more accurate results are considered to be possible
when comprehensive dictionary learning process is
applied. In general, the visual information awareness
characteristic of salient foreground environmental
object for machine can be obtained by applying the
proposed approach in this paper, while the visual
perception information can be achieved by applying
state of the art classification approach to form the
visual representation knowledge of environmental
object for further higher level processing.
Considering the future work, more dictionary
entries or different entries will be taken into account,
while different sparse decomposition methods shall
be researched. Moreover, the false-positive or false-
negative recognition rates will also be investigated
as well.
ACKNOWLEDGEMENTS
The authors would like to thank the anonymous
reviewers for their valuable suggestions and critical
comments which have led to a much improved
paper. The work accomplished in this paper is
supported by the National Natural Science
Foundation of China (Grant No. 61174204).
REFERENCES
Fingelkurts, A. A., Fingelkurts, A. A., & Neves, C. F.
(2012). “Machine” consciousness and “artificial”
thought: An operational architectonics model guided
approach. Brain research, 1428, 80-92.
Ramík, D. M., Madani, K., & Sabourin, C. (2013). From
visual patterns to semantic description: A cognitive
approach using artificial curiosity as the foundation.
Pattern Recognition Letters, 34(14), 1577-1588.
Reggia, J. A. (2013). The rise of machine consciousness:
Studying consciousness with computational models.
Neural Networks, 44, 112-131.
Wickens, C. D., & Andre, A. D. (1990). Proximity
compatibility and information display: Effects of
color, space, and objectness on information
integration. Human Factors: The Journal of the
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
436

Human Factors and Ergonomics Society, 32(1), 61-77.
Alexe, B., Deselaers, T., & Ferrari, V. (2010, June). What
is an object?. In Computer Vision and Pattern
Recognition (CVPR), 2010 IEEE Conference on (pp.
73-80). IEEE.
Alexe, B., Deselaers, T., & Ferrari, V. (2012). Measuring
the objectness of image windows. Pattern Analysis
and Machine Intelligence, IEEE Transactions on,
34(11), 2189-2202.
Chang, K. Y., Liu, T. L., Chen, H. T., & Lai, S. H. (2011,
November). Fusing generic objectness and visual
saliency for salient object detection. In Computer
Vision (ICCV), 2011 IEEE International Conference
on (pp. 914-921). IEEE.
Spampinato, C., & Palazzo, S. (2012, November).
Enhancing object detection performance by integrating
motion objectness and perceptual organization. In
Pattern Recognition (ICPR), 2012 21st International
Conference on (pp. 3640-3643). IEEE.
Cheng, M. M., Zhang, Z., Lin, W. Y., & Torr, P. (2014,
June). BING: Binarized normed gradients for
objectness estimation at 300fps. In Computer Vision
and Pattern Recognition (CVPR), 2014 IEEE
Conference on (pp. 3286-3293). IEEE.
Olshausen, B. A., & Field, D. J. (1997). Sparse coding
with an overcomplete basis set: A strategy employed
by V1?. Vision research, 37(23), 3311-3325.
Mairal, J., Elad, M., & Sapiro, G. (2008). Sparse
representation for color image restoration. Image
Processing, IEEE Transactions on, 17(1), 53-69.
Wright, J., Yang, A. Y., Ganesh, A., Sastry, S. S., & Ma,
Y. (2009). Robust face recognition via sparse
representation. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 31(2), 210-227.
Ji, Z. J., Wang, W. Q., & Lu, K. (2013). Extract
foreground objects based on sparse model of
spatiotemporal spectrum. In Image Processing (ICIP),
2013 IEEE International Conference on (pp. 3441-
3445). IEEE.
Sun, S. W., Wang, Y. C. F., Huang, F., & Liao, H. Y. M.
(2013). Moving foreground object detection via robust
SIFT trajectories. Journal of Visual Communication
and Image Representation, 24(3), 232-243.
Biswas, S., & Babu, R. V. (2014, October). Sparse
representation based anomaly detection with enhanced
local dictionaries. In Image Processing (ICIP), 2014
IEEE International Conference on (pp. 5532-5536).
IEEE.
Hubel, D. H., & Wiesel, T. N. (1968). Receptive fields and
functional architecture of monkey striate cortex. The
Journal of physiology, 195(1), 215-243.
Liu, C., & Wechsler, H. (2002). Gabor feature based
classification using the enhanced fisher linear
discriminant model for face recognition. Image
processing, IEEE Transactions on, 11(4), 467-476.
Davis, G., Mallat, S., & Avellaneda, M. (1997). Adaptive
greedy approximations. Constructive approximation,
13(1), 57-98.
Donoho, D. L., & Tsaig, Y. (2008). Fast solution of l
1
-
norm minimization problems when the solution may
be sparse. Information Theory, IEEE Transactions on,
54(11), 4789-4812.
Rubinstein, R., Zibulevsky, M., & Elad, M. (2010).
Double sparsity: Learning sparse dictionaries for
sparse signal approximation. Signal Processing, IEEE
Transactions on, 58(3), 1553-1564.
Aharon, M., Elad, M., & Bruckstein, A. (2006). K-SVD:
An Algorithm for Designing Overcomplete
Dictionaries for Sparse Representation. Signal
Processing, IEEE Transactions on, 54(11), 4311-4322.
Tibshirani, R. (1996). Regression shrinkage and selection
via the lasso. Journal of the Royal Statistical Society.
Series B (Methodological), 267-288.
Perazzi, F., Krahenbuhl, P., Pritch, Y., & Hornung, A.
(2012, June). Saliency filters: Contrast based filtering
for salient region detection. In Computer Vision and
Pattern Recognition (CVPR), 2012 IEEE Conference
on (pp. 733-740). IEEE.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., & Zisserman, A. (2008). The PASCAL Visual
Object Classes Challenge 2007 (VOC 2007) Results
(2007). In URL http://www.pascal-network.org/challe-
nges/VOC/voc2007/workshop/index.html.
SalientForegroundObjectDetectionbasedonSparseReconstructionforArtificialAwareness
437
