
Multicriteria Neural Network Design in the Speech-based Emotion
Recognition Problem
Christina Brester
1
, Eugene Semenkin
1
, Maxim Sidorov
2
and Olga Semenkina
1
1
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University, Krasnoyarsk, Russia
2
Institute of Communications Engineering, University of Ulm, Ulm, Germany
Keywords: Neural Network, Multicriteria Design, Cooperative Genetic Algorithm, Speech-based Emotion Recognition,
Feature Selection.
Abstract: In this paper we introduce the two-criterion optimization model to design multilayer perceptrons taking into
account two objectives, which are the classification accuracy and computational complexity. Using this
technique, it is possible to simplify the structure of neural network classifiers and at the same time to keep
high classification accuracy. The main benefits of the approach proposed are related to the automatic choice
of activation functions, the possibility of generating the ensemble of classifiers, and the embedded feature
selection procedure. The cooperative multi-objective genetic algorithm is used as an optimizer to determine
the Pareto set approximation in the two-criterion problem. The effectiveness of this approach is investigated
on the speech-based emotion recognition problem. According to the results obtained, the usage of the
proposed technique might lead to the generation of classifiers comprised by fewer neurons in the input and
hidden layers, in contrast to conventional models, and to an increase in the emotion recognition accuracy by
up to a 4.25% relative improvement due to the application of the ensemble of classifiers.
1 INTRODUCTION
The sphere of human-machine interactions is closely
related to affective computing (Picard, 1995), which
is the interdisciplinary domain including algorithms,
systems and devices aimed at recognizing,
processing, and simulating human emotions. In most
cases all these techniques engage video or audio data
to analyse users’ emotions. Also there are multi-
modal systems which fuse visual information and
acoustic characteristics extracted from speech
signals. However, in this paper we consider the
human emotion recognition problem in the
framework of intellectual spoken dialogue systems
and, therefore, we apply only audio data.
Previously it was found that compared with
various classification models neural networks
showed rather high effectiveness for the speech-
based emotion recognition problem (Brester et al.,
2014). In the experiments conducted a multilayer
perceptron (MLP) with one hidden layer trained by
the error backpropagation algorithm (BP) was used.
Conventionally, the number of neurons in the
hidden layer is proportional to the amount of classes
in the sample and the dimensionality of the feature
vector. In the case of the emotion recognition
problem the quantity of input attributes is very large:
generally, we extract 384 acoustic characteristics
from the speech signal. As a result, the MLP
structure is exaggerated and contains too many
neurons in its hidden layer. Moreover, while
designing MLPs, researchers have to choose the
activation function for each neuron, which is not a
trivial task. By default a sigmoid is widely used,
despite the fact that there are a lot of other activation
functions which are easier in the sense of
computational complexity and at the same time
might be effectively applied without detriment to the
recognition accuracy.
Taking into account these points, we decided to
improve the MLP performance by optimizing its
structure. In this study we propose a two-objective
optimization model which allows us to generate
appropriate MLPs based on two criteria: the
classification accuracy and computational
complexity. Using this strategy, it is possible to
design the MLP whose performance is comparable
with the accuracy of the conventional model and
whose structure is optimal in the sense of
computational complexity. The main advantages of
the approach proposed also include the automatic
621
Brester C., Semenkin E., Sidorov M. and Semenkina O..
Multicriteria Neural Network Design in the Speech-based Emotion Recognition Problem.
DOI: 10.5220/0005571806210628
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 621-628
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

choice of activation functions, the embedded feature
selection procedure, and the option of generating the
ensemble of classifiers.
The rest of the paper is organized as follows: in
Section II a description of the two-objective model
for the neural network design and the cooperative
genetic algorithm, which is applied to optimize the
criteria introduced, are presented. In Section III there
is a definition of the speech-based emotion
recognition problem and the corpora used. The
experiments conducted, the results obtained, and the
main inferences are included in Section IV. The
conclusions and future work are presented in
Section V.
2 PROPOSED APPROACH
2.1 Multicriteria Optimization Model
for Neural Network Design
In this study we propose the two-criterion
optimization model for neural network design,
specifically, for the automatic generation of MLPs
with one hidden layer. By taking into account two
objectives, it is possible to attain a trade-off between
the classification accuracy and computational
complexity.
Criterion 1. The relative classification error:
minimize:
,
N
N
EK1
all
yincorrectl
== (1)
where
yincorrectl
N
is the number of instances classified
incorrectly,
all
N is the common number of instances.
Criterion 2. Computational complexity:
minimize:
,iKNK2
neurons
N
1j
jweights
)(
+=
=
(2)
where
weight
act
i
T
T
)i(K
j
= is the coefficient reflecting
the relative computational complexity of evaluating
the
i-th activation function of the j-th neuron; i is the
identification number of the activation function in
the finite set comprised by alternative variants of
activation functions;
act
i
T is the time spent on
evaluating the
i-th activation function;
weight
T
is the
time required to process one connection;
weights
N
is
the number of connections in the MLP;
neurons
N
is
the number of neurons in the MLP.
act
i
T and
weight
T
are assessed empirically. It is essential to note that
i
K is independent of the software used because
act
i
T is normalized by
weight
T
.
To solve this two-criterion problem, we suggest
applying a multi-objective genetic algorithm
(MOGA), which operates with binary strings coding
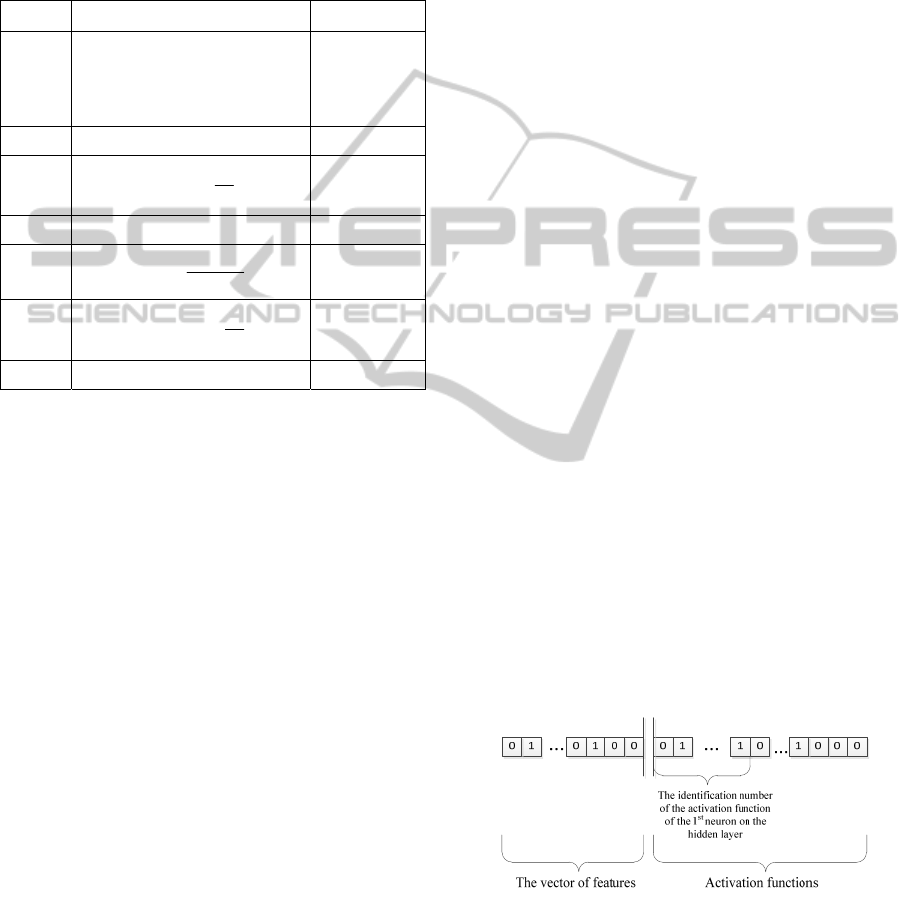
diverse MLP structures. Each candidate solution,
called a
chromosome, contains identification
numbers of all neurons from the hidden layer
(Figure 1). Zero corresponds to the absence of
neurons. Input parameters include the set of
activation functions with their ID-numbers and the
maximum number of neurons in the hidden layer.
Figure 1: The presentation of the MLP structure as a
binary string.
The backpropagation algorithm is applied to train
MLPs with different numbers of neurons in the
hidden layer and estimate the criterion
K
1
.
Moreover, we propose using the cooperative
multicriteria genetic algorithm as a multi-objective
optimization procedure to diminish the drawbacks of
the evolutionary search (Brester
et al., 2015a). The
next section contains a concise description of this
heuristic multi-agent procedure and its advantages.
2.2 Cooperative Multi-objective
Heuristic Procedure
While designing a MOGA, researchers are faced with
some issues which are related to fitness assignment
strategies, diversity preservation techniques, and
ways of elitism implementation (Zitzler
et al., 2004).
To eliminate a number of problems which arise while
designing multicriteria evolutionary methods, in this
study we use a cooperation of several genetic
algorithms (GA) based on various heuristic
mechanisms. An island model is applied to involve
a few GAs which realize different concepts.
Moreover, this model allows us to parallelize
calculations and, consequently, to reduce
computational time.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
622
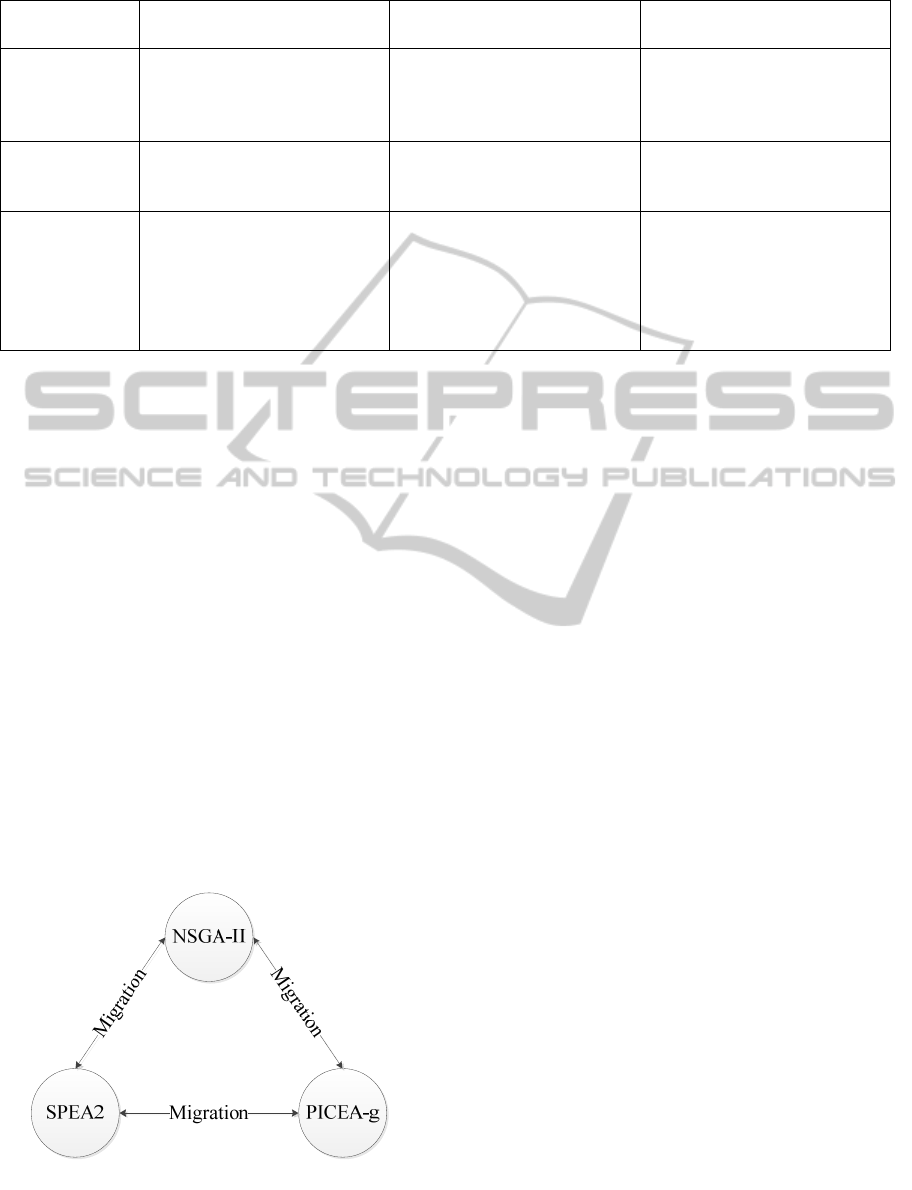
Table 1: Basic features of the MOGA used.
MOGA Fitness Assignment Diversity Preservation Elitism
NSGA-II
Pareto-dominance
(
niching mechanism) and
diversity estimation (
crowding
distance
)
Crowding distance
Combination of the
previous population and the
offspring
PICEA-g
Pareto-dominance
(
with generating goal vectors)
Nearest neighbour technique
The archive set and
combination of the previous
population and the offspring
SPEA2
Pareto-dominance
(
niching mechanism) and
density estimation (
the
distance to the k-th nearest
neighbour in the objective
space
)
Nearest neighbour technique The archive set
Generally speaking, an island model (Whitley
et
al
., 1997) of a GA implies the parallel work of
several algorithms. A parallel implementation of
GAs has shown not just an ability to preserve genetic
diversity, since each island can potentially follow a
different search trajectory, but also could be applied
to separable problems. The initial number of
individuals
M is spread across L subpopulations:
M
i
=M/L, i=1,…,L. At each T-th generation
algorithms exchange the best solutions (migration).
There are two parameters:
migration size, the number
of candidates for migration, and migration interval,
the number of generations between migrations.
Moreover, it is necessary to define the island model
topology, in other words, the scheme of migration.
We use the fully connected topology that means each
algorithm shares its best solutions with all other
algorithms included in the island model. The multi-
agent model is expected to preserve a higher level of
genetic diversity. The benefits of the particular
algorithm could be advantageous in different stages
of optimization.
Figure 2: The island model implemented.
In our implementation the Non-Sorting Genetic
Algorithm II
(NSGA-II) (Deb et al., 2002), the
Preference-Inspired Co-Evolutionary Algorithm with
goal vectors
(PICEA-g) (Wang, 2013), and the
Strength Pareto Evolutionary Algorithm 2 (SPEA2)
(Zitzler et al., 2002) are used to be involved as
parallel working islands (Figure 2).
This multi-agent heuristic procedure does not
require additional experiments to expose the most
appropriate algorithm for the problem considered. Its
performance was thoroughly investigated on the set
of test functions CEC2009 (Zhang
et al., 2008). The
results obtained demonstrated the high effectiveness
of the cooperative algorithm and, therefore, we
decided to apply it as an optimizer in the neural
network design problem.
3 SPEECH-BASED EMOTION
RECOGNITION
3.1 Problem Definition
While communicating with humans, machines should
perceive the qualities of the user (as people usually
do) such as age, gender and emotions to adapt its
answers for the particular speaker.
Speech-based
emotion recognition
is one of the most essential
aspects of the personalization process. Generally, any
approach used to solve this recognition problem
consists of three main stages.
At first, it is necessary to extract acoustic
characteristics from the collected utterances. At the
«INTERSPEECH 2009 Emotion Challenge» an
appropriate set of acoustic characteristics
MulticriteriaNeuralNetworkDesignintheSpeech-basedEmotionRecognitionProblem
623

Table 2: Statistical description of the used corpora.
Database Language
Full length
(min.)
Number of
emotions
File level duration
Notes
Mean (sec.) Std. (sec.)
Emo-DB German 24.7 7 2.7 1.02 Acted
SAVEE English 30.7 7 3.8 1.07 Acted
LEGO English 118.2 3 1.6 1.4 Non-acted
UUDB Japanese 113.4 4 1.4 1.7 Non-acted
representing any kind of speech signal was
introduced. This set of features comprised attributes
such as power, mean, root mean square, jitter,
shimmer, 12 MFCCs and 5 formants. The mean,
minimum, maximum, range and deviation of the
following features have also been used: pitch,
intensity and harmonicity. The number of
characteristics is 384. To get the conventional feature
set introduced at INTERSPEECH 2009, the Praat
(Boersma, 2002), or OpenSMILE (Eyben
et al.,
2010) systems might be used. Secondly, all extracted
attributes or the most relevant of them should be
involved in the supervised learning process to adjust
a classifier. At the final stage, the signal that has to
be analysed is transformed into an unlabelled feature
vector (also with the usage of the Praat or
OpenSMILE systems) and then the trained
classification model receives it as the input data to
make a prediction.
3.2 Corpora Description
In the study a number of speech databases have been
used and this section provides their brief description.
The
Emo-DB emotional database (German)
(Burkhardt et al., 2005) was recorded at the
Technical University of Berlin and consists of
labelled emotional German utterances which were
spoken by 10 actors (5 female). Each utterance has
one of the following emotional labels: neutral, anger,
fear, joy, sadness, boredom or disgust.
The
SAVEE (Surrey Audio-Visual Expressed
Emotion) corpus (English) (Haq
et al., 2010) was
recorded as part of an investigation into audio-visual
emotion classification from four native English male
speakers. The emotional label for each utterance is
one of the standard set of emotions (anger, disgust,
fear, happiness, sadness, surprise and neutral).
The
LEGO emotion database (English) (Schmitt
et al., 2012) comprises non-acted American English
utterances extracted from an automated bus
information system of the Carnegie Mellon
University at Pittsburgh, USA. The utterances are
requests to the Interactive Voice Response system
spoken by real users with real concerns. Each
utterance is annotated with one of the following
emotional labels: angry, slightly angry, very angry,
neutral, friendly, and non-speech (critical noisy
recordings or just silence). In this study different
ranges of anger have been merged into a single class
and friendly utterances have been deleted. This pre-
processing results in a 3-class emotion classification
task.
The
UUDB (The Utsunomiya University Spoken
Dialogue Database for Paralinguistic Information
Studies) database (Japanese) (Mori
et al., 2011)
consists of spontaneous Japanese human-human
speech. The task-oriented dialogue produced by
seven pairs of speakers (12 female) resulted in 4,737
utterances in total. Emotional labels for each
utterance were created by three annotators on a five-
dimensional emotional basis (interest, credibility,
dominance, arousal, and pleasantness). For this work,
only the pleasantness and arousal axes are used. The
corresponding quadrant (anticlockwise, starting in
the positive quadrant, and assuming arousal as
abscissa) can also be assigned emotional labels:
happy-exciting, angry-anxious, sad-bored and
relaxed-serene.
There is a statistical description of the used
corpora in Table II.
4 EXPERIMENTS AND RESULTS
To investigate the effectiveness of the approach
proposed, we performed several experiments.
Firstly, the conventional MLP classifier
implemented in the program system
WEKA (Hall et
al.
, 2009) was applied. This model was trained with
the BP algorithm and contained one hidden layer
with
[(NumberOfFeatures+NumberOfClasses)/2+1]
–neurons (the number of features was equal to 384,
the number of classes varied from 3 to 7 depending
on the database used). The activation function for all
of the neurons was a sigmoid. For each database the
6-fold cross-validation procedure (and also in the
next experiments) was conducted to assess the
averaged
F-score metric (Goutte et al., 2005): the
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
624
more effective the classifier applied, the higher the
F-score value obtained.
Then we used the proposed two-criterion
optimization model to design MLP classifiers
automatically. The set of possible activation
functions was defined beforehand (Table 3).
Table 3: Activation functions used.
№ Activation function
i
K value
1
>
≤≤−
−<
=
1x1,
1x1x,
1x1,-
f(x)
6.46
2
1f(x) =
2.69
3
2
x
2
ef(x)
−
=
22.48
4
tanh(x)f(x) =
23.14
5
x
e1
1
f(x)
−
+
=
22.20
6
2
x
2
e-1f(x)
−
=
20.55
7
atan(x)f(x) =
27.01
Moreover, to evaluate the second criterion
‘computational complexity’, we estimated
i
K
coefficients empirically. The time spent on
evaluating the
i-th activation function
act
i
T was
normalized by the
weight
T
value obtained as the time
required to multiply two real numbers and then to
add another real value to this sum (we simulated the
processing of a new connection in the MLP
structure). It might be noticed that the
i
K values for
some of these functions stand out significantly.
In the second experiment the cooperative multi-
objective genetic algorithm was used as an optimizer.
It is well-known that in contrast to one-criterion GAs,
the outcome of MOGAs is the set of non-dominated
points which form the Pareto set approximation and,
therefore, it is necessary to choose one solution from
the set of alternative candidates. In addition to the
training sample and the test one, we used the
evaluation set, which was 20% of the training
sample, to compare non-dominated points based on
the classification accuracy on these examples. 80%
of the training set were used by the MOGA to assess
the first criterion
‘the relative classification error’: to
obtain the averaged value of this metric, we
conducted the 3-fold cross-validation procedure for
each binary string coding the MLP structure. The
number of epochs in the BP algorithm was equal to
25. For each component of the MOGA (NSGA-II,
PICEA-g, and SPEA2) the following settings were
defined: binary tournament selection, uniform
recombination and the mutation probability
p
m
=1/n,
where
n is the length of the chromosome. All islands
had an equal amount of resources (20 generations
and 30/3 = 10 individuals in populations), the
migration size was equal to 3 (in total each island got
6 points from two others), and the migration interval
was equal to 5 generations. Finally, the evaluation
sample was used to compare the classification
accuracy provided by all of the alternative MLP
structures and to choose the most effective model
based on these values (at this stage the number of
epochs in the BP algorithm was equal to 100). Then
the training and evaluation instances were merged
and used by the BP algorithm (the number of epochs
was equal to 250) to find the classification accuracy
on the test set.
However, it is possible to take advantage of the
set of alternative solutions. We repeated the previous
experiment, but we did not choose only one solution
amid all of the non-dominated points. Based on the
classification accuracy assessed on the evaluation set,
15 different models with the highest performance
were defined (the common number of non-dominated
alternatives was equal to 3⋅10+2⋅7=44, where 10 was
the population size for all three islands and 7 was the
outer set size for the PICEA-g and SPEA2
algorithms). Then these most effective MLP models
were included in the ensemble of classifiers to make
a collective decision based on the majority rule.
Owing to the binary representation of the MLP
structure, the feature selection procedure might be
embedded in the model design process (Brester
et al.,
2015b). The vector of inputs is also presented as a
part of the binary string, where
unit and zero
correspond to a relative attribute and an irrelative one
respectively (Figure 3).
Figure 3: The presentation of the MLP structure with the
feature selection procedure.
Next, two previous experiments were repeated
with extended binary strings which coded not only
the hidden layer of the MLP structure but also the
feature vector. Due to the greater number of genes in
MulticriteriaNeuralNetworkDesignintheSpeech-basedEmotionRecognitionProblem
625
a chromosome, it was necessary to increase the
quantity of computational resources which the
MOGA was provided with. In these experiments for
all of the islands the number of generations was equal
to 30, the population contained 60/3 = 20 individuals.
(The migration size was equal to 5 and the migration
interval was equal to 5 generations). While
generating the initial population, the probability of 1
in the part of the chromosome corresponding to the
feature vector was equal to 0.8. Firstly, we chose one
most effective MLP structure from the set of non-
dominated points and estimated the F-score value.
Secondly, we formed the ensemble of classifiers and
again defined the F-score metric.
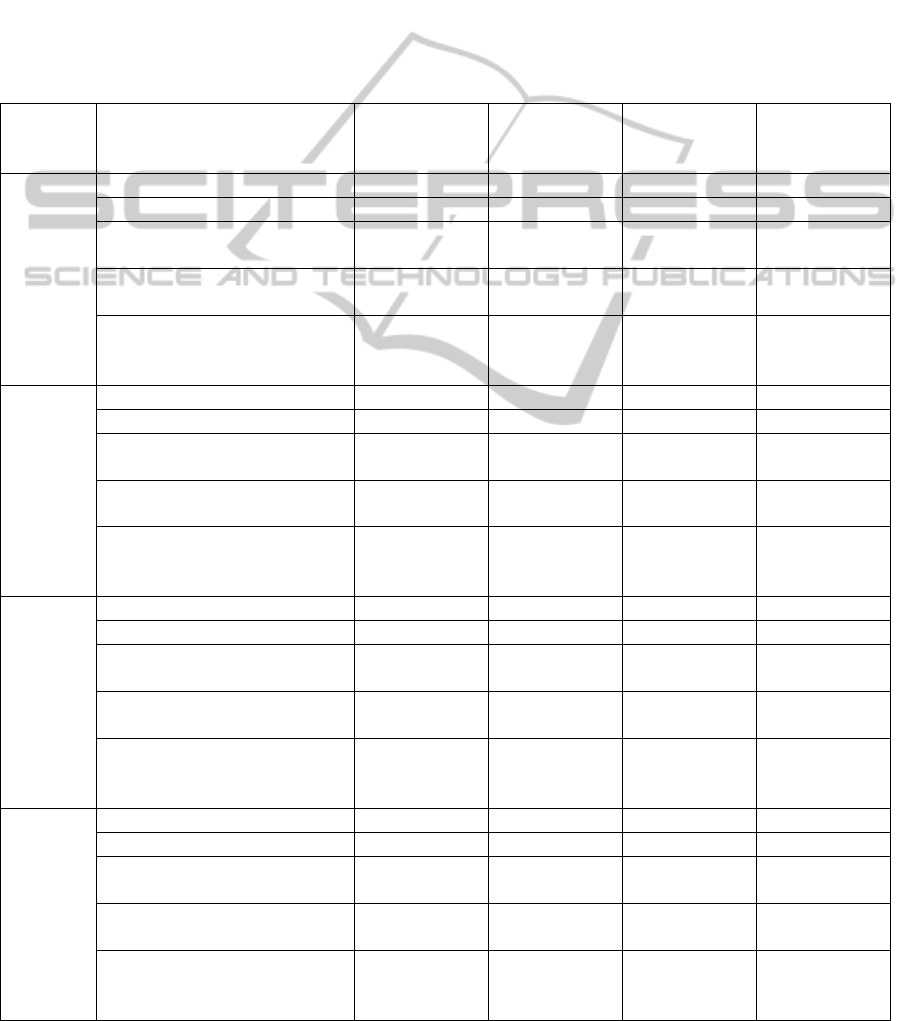
Table 4 contains the results obtained in all of the
experiments conducted.
The rows
‘Ensemble of MLPs designed by the
MOGA’
and ‘Ensemble of MLPs designed by the
MOGA with feature selection’
contain the averaged
results for MLP structures in the ensemble. We
analysed the experimental results statistically: a t-test
with the significance level p=0.05 exposed that the
conventional MLP did not outperform any of models
(or any ensemble of models) designed by the
Table 4: Experimental results.
Database Classifier F-score
K2 criterion
value
The number of
neurons in the
hidden layer
Dimensionality
of the feature
vector
Emo-DB
Conventional MLP (WEKA) 80.83 81759.8 197 384
MLP designed by the MOGA 80.75 62492.6 152.17 384
Ensemble of MLPs designed
by the MOGA
82.90
62276.5 151.6 384
MLP designed by the MOGA
with feature selection
79.94 40997.0 139 265
Ensemble of MLPs designed
by the MOGA with feature
selection
81.56 41895.7 142.03 268.12
SAVEE
Conventional MLP (WEKA) 59.55 81759.8 197 384
MLP designed by the MOGA 61.69 62212.1 151.5 384
Ensemble of MLPs designed
by the MOGA
62.02
62677.2 152.7 384
MLP designed by the MOGA
with feature selection
60.44 46144.9 155.7 269.2
Ensemble of MLPs designed
by the MOGA with feature
selection
61.58 43208.3 149.644 261.5
LEGO
Conventional MLP (WEKA) 68.19 80058.6 195 384
MLP designed by the MOGA 66.03 62678.2 154.3 384
Ensemble of MLPs designed
by the MOGA
71.05 62172.6 153.1 384
MLP designed by the MOGA
with feature selection
66.81 44910.7 151.7 273.0
Ensemble of MLPs designed
by the MOGA with feature
selection
71.10
44107.5 149.9 271.7
UUDB
Conventional MLP (WEKA) 49.34 80276.8 195 384
MLP designed by the MOGA 47.18 62667.9 154 384
Ensemble of MLPs designed
by the MOGA
50.68 63033.0 154.7 384
MLP designed by the MOGA
with feature selection
49.32 45330.0 154.0 272.0
Ensemble of MLPs designed
by the MOGA with feature
selection
51.34
43603.4 148.844 269.178
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
626

cooperative MOGA in the sense of classification
performance.
Due to the usage of the two-criterion optimization
model, we managed to find MLP structures which
were also effective in terms of computational
complexity. They not only had fewer neurons in the
hidden layer, but also the activation functions
required less computational time. These classifiers
might be especially effective if it is necessary to
make predictions in real time.
At the same time we increased the F-score values
significantly with the application of MLP ensembles.
For all of the databases MLP ensembles with or
without the feature selection procedure demonstrated
the best results. The relative improvement of F-score
values compared with the effectiveness of the
conventional MLP was equal to: 2.56% for
Emo-DB,
4.15% for SAVEE, 4.25% for LEGO, and 4.05% for
UUDB.
Moreover, it is important to note that the usage of
the embedded feature selection procedure allowed us
to simplify MLP structures and decrease their
computational complexity significantly.
5 CONCLUSIONS
In this paper we proposed the two-criterion
optimization model to design MLP classifiers
automatically for the speech-based emotion
recognition problem. The main benefit of this
approach is the opportunity to generate effective
MLP structures taking into consideration two
objectives
‘classification performance’ and
‘computational complexity’.
In the experiments conducted it was revealed that
this technique allowed us to design MLP classifiers
with simpler structures, whose accuracy was
comparable with (or even higher than) the
performance of conventional MLPs containing more
neurons in the hidden layer.
In the framework of this technique, it is also
possible to design ensembles of classifiers; their
application leads to the essential improvement of the
classification quality.
The binary representation of MLP structures
permitted us to embed the feature selection procedure
and additionally to simplify classifiers.
Finally, there are some other questions related to
the human-machine communication sphere. The
proposed scheme might be applied without any
changes to the speech-based speaker identification
problem as well as to speaker gender or age
recognition.
ACKNOWLEDGEMENTS
Research is performed with the financial support of
the Ministry of Education and Science of the Russian
Federation within the federal R&D programme
(project RFMEFI57414X0037).
REFERENCES
Boersma, P., 2002. Praat, a system for doing phonetics by
computer. Glot international, 5(9/10), pp. 341–345.
Brester, Ch., Sidorov, M., Semenkin, E., 2014. Speech-
based emotion recognition: Application of collective
decision making concepts. Proceedings of the 2nd
International Conference on Computer Science and
Artificial Intelligence (ICCSAI2014), pp. 216-220.
Brester, Ch., Semenkin, E., 2015a. Cooperative multi-
objective genetic algorithm with parallel
implementation. ICSI-CCI 2015, Part I, LNCS 9140,
pp. 471–478.
Brester, Ch., Semenkin, E., Sidorov, M., Kovalev, I.,
Zelenkov, P., 2015b. Evolutionary feature selection for
emotion recognition in multilingual speech analysis //
Proceedings of IEEE Congress on Evolutionary
Computation (CEC2015), pp. 2406–2411.
Burkhardt, F., Paeschke, A., Rolfes, M., Sendlmeier, W.
F., and Weiss, B., 2005. A database of german
emotional speech. In Interspeech, pp. 1517–1520.
Deb, K., Pratap, A., Agarwal, S., Meyarivan, T., 2002. A
fast and elitist multiobjective genetic algorithm:
NSGA-II. IEEE Transactions on Evolutionary
Computation 6 (2), pp. 182-197.
Eyben, F., Wöllmer, M., and Schuller, B., 2010.
Opensmile: the Munich versatile and fast opensource
audio feature extractor. In Proceedings of the
international conference on Multimedia, pp. 1459–
1462. ACM.
Goutte, C., Gaussier, E. 2005. A probabilistic
interpretation of precision, recall and F-score, with
implication for evaluation. ECIR'05 Proceedings of
the 27th European conference on Advances in
Information Retrieval Research, pp. 345–359.
Hall, M., Frank, E., Holmes, G., Pfahringer, B.,
Reutemann, P., Witten, I. H. The WEKA Data Mining
Software: An Update. SIGKDD Explorations, Volume
11, Issue 1.
Haq, S., Jackson, P., 2010. Machine Audition: Principles,
Algorithms and Systems, chapter Multimodal Emotion
Recognition. IGI Global, Hershey PA, pp. 398–423.
Mori, H., Satake, T., Nakamura, M., and Kasuya, H.,
2011. Constructing a spoken dialogue corpus for
studying paralinguistic information in expressive
conversation and analyzing its statistical/acoustic
characteristics, Speech Communication, 53.
Picard, R.W., 1995. Affective computing. Tech. Rep.
Perceptual Computing Section Technical Report No.
MulticriteriaNeuralNetworkDesignintheSpeech-basedEmotionRecognitionProblem
627

321, MIT Media Laboratory, 20 Ames St., Cambridge,
MA 02139.
Schmitt, A., Ultes, S., and Minker, W., 2012. A
parameterized and annotated corpus of the cmu let’s
go bus information system. Proceedings of
International Conference on Language Resources and
Evaluation (LREC), Istanbul, Turkey, pp. 3369-3373.
Wang, R., 2013. Preference-Inspired Co-evolutionary
Algorithms. A thesis submitted in partial fulfillment
for the degree of the Doctor of Philosophy, University
of Sheffield.
Whitley, D., Rana, S., and Heckendorn, R., 1997. Island
model genetic algorithms and linearly separable
problems. Proceedings of AISB Workshop on
Evolutionary Computation, vol.1305 of LNCS, pp.
109–125.
Zhang, Q., Zhou, A., Zhao, S., Suganthan, P. N., Liu, W.,
Tiwari, S., 2008. Multi-objective optimization test
instances for the CEC 2009 special session and
competition. University of Essex and Nanyang
Technological University, Tech. Rep. CES-487, 2008.
Zitzler, E., Laumanns, M., Bleuler, S., 2004. A Tutorial on
Evolutionary Multiobjective Optimization. In:
Gandibleux X., (eds.): Metaheuristics for
Multiobjective Optimisation. Lecture Notes in
Economics and Mathematical Systems, vol. 535,
Springer.
Zitzler, E., Laumanns, M., Thiele, L., 2002. SPEA2:
Improving the Strength Pareto Evolutionary Algorithm
for Multiobjective Optimization. Evolutionary
Methods for Design Optimisation and Control with
Application to Industrial Problems EUROGEN 2001
3242 (103), pp. 95–100.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
628
