
Hybrid Algorithm for Solving the Multi-compartment Vehicle Routing
Problem with Time Windows and Profit
Hadhami Kaabi
1
and Khaled Jabeur
2
1
D
´
epartement Informatique, Institut Sup
´
erieur de Gestion, 41, Avenue de la Libert
´
e, 2000, Tunis, Tunisia
2
D
´
epartement M
´
ethodes Quantitatives, Institut Sup
´
erieur de Commerce et de Comptabilit
´
e,
Rue Sadok El Jaouani, 7021, Tunis, Tunisia
Keywords:
Multi-compartment, Vehicle Routing, Time Windows, Profit, Genetic Algorithm, Iterated Local Search.
Abstract:
This paper presents a new variant of the well-known vehicle routing problem with time windows (VRPTW).
More precisely, this paper addresses a multi-compartment vehicle routing problem with time windows and
profit (MCVRPTW with profit). The aim of this problem is to serve a set of customers by using a set of
vehicles with multiple compartments, under a minimum traveling cost. The vehicles, starting and ending at
the depot, have a limited capacity and each compartment is dedicated to one product. A customer is served
only within a given time windows and, when it is visited a profit is collected (i.e. a profit not low than a
preset profit bound). To solve this problem, an hybrid approach combining the genetic algorithm (GA) and the
iterated local search (ILS) is used.
1 INTRODUCTION
Nowadays, the efficient distribution of goods in any
company enhances its competitiveness. To face the
increase in energy costs, an efficient planning of the
delivery paths should be established. This planning
should save resources and money. A well known and
studied problem to deal with this situation is the Vehi-
cle Routing Problem (VRP). The VRP, introduced by
Dantzig and Ramser (1959), is considered as a com-
binatorial optimization problem which is crucial for a
huge area of applications (e.g. logistics, production,
distribution, ect). The VRP is an extension of the clas-
sical Traveling Salesman Problem in which a set of
customers are served with a fleet of vehicles based at
one depot. In any classic VRP, the aim is to find a
minimum cost routes such that: (i) each vehicle starts
and ends at the depot, (ii) the total demand on each
route should not exceed the vehicle capacity. Sev-
eral variants of the VRP have appeared and were the
subjects of intense studies such as: VRP with Pickup
and Delivery, Periodic VRP, Capacitated VRP, VRP
with time windows, Stochastic VRP, ect. The multi-
compartment VRP is also a variant of the VRP but it
has not received much attention yet and it is the topic
of our research work.
The multi-compartment VRP (MCVRP) is intro-
duced in 1979 and had practical significance (Reed
et al., 2014). The MCVRP consists in transport-
ing different products that should be kept in separate
compartments because of incompatibility constraints.
Each compartment is dedicated to one product. The
demand of each customer for a product is delivered
by one vehicle. However, the entire delivery (e.g. de-
mand) of a customer can be brought by several vehi-
cles (Fallahi et al., 2008). The MCVRP is NP-hard
since it is a particular case of the VRP. Vehicle rout-
ing problems with compartments are well known in
logistics but have little attention in the literature. The
most published papers of the MCVRP concern these
applications:
The distribution of various types of Fuel and oil
((Lahyani et al., 2015), (Relvas et al., 2014), (Cornil-
lier et al., 2012), (Cornillier et al., 2009), (Cornillier et
al., 2008), (Fagerholt et al., 2000)) and some maritime
applications ((Stalhane et al.,2012), (Havattum et al.,
2009)). A second application involves the delivery of
animal foods introduced by Fallahi et al. (2008), and
grocery products requiring different levels of refriger-
ation (e.g. dry, refrigerated and frozen) (Chajakis and
Guignard, 2003). The pickup and delivery of live-
stock is also a known application of the MCVRP as
developed in (Oppen and Lokketangen, 2008). An-
imals should be kept separately to avoid contamina-
tion. Multi-compartment vehicles are also used in
waste collection, where for example the general waste
324
Kaabi H. and Jabeur K..
Hybrid Algorithm for Solving the Multi-compartment Vehicle Routing Problem with Time Windows and Profit.
DOI: 10.5220/0005572503240329
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 324-329
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

are loaded in a specified compartment and another
compartment is dedicated to recyclables ((Reed et al.,
2014), (Muyldermans and Pang, 2010)).
The MCVRP with time widows (MCVRPTW)
and profit extends the MCVRP. First, each customer
is served only within a given time windows, which
is a common constraint in various routing problem
(e.g. vehicle routing problem with time windows
(VRPTW)) (Solomon, 1987). Second, the request
of a customer is composed of different products with
which profits are associated . Once a request is satis-
fied , a profit is collected. A customer is visited if and
only if a preset lower bound on the profit is exceeded.
This constraint implies that some customer requests
may not be satisfied. This problem is addressed under
different names in the literature. A traveling Salesman
Problems with profits was provided by Feillet et al.
(2011), ((Aras et al., 2011), (Valle et al., 2011)) have
also proposed a selective vehicle routing problem. In
this paper, we propose an hybrid algorithm to solve
the MCVRP with time windows and profit. To the
best of our knowledge, the MCVRP addressed in this
paper is studied for the first time. The first assump-
tion, is that a fleet of vehicles equipped with multi-
ple compartments, serve customers demands and re-
turn to the depot. Each compartment is dedicated to
one product. Indeed, a product may regroup different
kinds of goods which share the same characteristics.
This case is encountered in the real life application
which consists in the delivery of groceries to conve-
nience stores. The second assumption, is to serve a
customer within a given time windows at minimum
cost and a maximum collected profit. This implies
that the vehicles can not visit all customers.
In this paper, we propose an hybrid approach
based on the Genetic Algorithm (GA) and the Iter-
ated Local Search (ILS), to solve the MCVRP with
time windows and profit. This approach exploits the
usefulness of both the GA and ILS.
The remainder of this paper is organized as fol-
lows. In section 2, the problem formulation is ad-
dressed. In section 3, the hybridization approach
based on the GA and and ILS is presented. In sec-
tion 4, preliminary results are presented. Concluding
remarks and future works are reported in section 5.
2 PROBLEM FORMULATION
The multi-compartment vehicle routing problem with
time windows and profit (MCVRPTW with profit)
proposed can be defined as an undirected complete
graph G(N,E), in which N={0,...,n} represents the set
of nodes and E the set of edges. The depot is repre-
sented by the node 0, and a set of customers is repre-
sented by the set N’. In this definition, a non negative
routing cost c
i j
and a travel time t
i j
are associated with
each arc (i,j) ∈ E. A fleet V={1,...,v} of identical vehi-
cles with m compartments, deliver a set P={1,...,m} of
m products. Each product p is loaded in compartment
p which has a known capacity Q
p
. Each customer
i has a known request d
ip
≤ Q
p
for each product p.
The request of each product to each customer must be
delivered by only one vehicle. However, the different
products required by one customer can be brought by
different vehicles. The customer is served only within
a given time windows [a
i
,b
i
] satisfying a
i
− b
i
≥ s
i
,
where s
i
denotes the service time. A product is deliv-
ered to a customer if and only if a preset lower bound
on the collected profit is exceeded.
min
∑
i, j
∑
k∈V
c
i j
x
i jk
(1)
s.t
∑
i∈N
x
i jk
≤ 1 j ∈ N
0
,k ∈ V, (2)
∑
i∈N
x
i jk
=
∑
i∈N
x
jik
j ∈ N
0
,k ∈ V, (3)
∑
i, j∈S
x
i jk
≤ |S| − 1 k ∈ V,S ⊆ N
0
,|S| ≥ 2, (4)
y
jk p
≤
∑
i∈N
x
i jk
j ∈ N
0
,k ∈ V, p ∈ P, (5)
∑
k∈V
y
jk p
= 1 j ∈ N
0
, p ∈ P, (6)
∑
j∈N
0
y
jk p
d
jp
≤ Q
p
k ∈ V, p ∈ P, (7)
s
ik
+t
i j
− K(1 − x
i jk
) ≤ s
jk
i, j ∈ N
0
,k ∈ V, (8)
a
i
≤ s
ik
≤ b
i
, i ∈ N,k ∈ V, (9)
∑
k∈V
π
jp
y
jk
≥ p
min
j ∈ N
0
, p ∈ P (10)
x
i jk
∈
{
0,1
}
i, j ∈ N, i 6= j, k ∈ V, (11)
y
jk p
∈
{
0,1
}
j ∈ N
0
,k ∈ V, p ∈ P,d
jp
6= 0. (12)
The objective function (1) minimizes the total
routing cost. Constraints (2) ensure that each cus-
tomer may be visited at most once by each route.
Constraints (3) ensure the continuity of each route: if
a vehicle visits node j it must leave it. Constraints (4)
define the classical subtour elimination constraints.
Constraints (5) set y
jk p
to zero for each product p if
vehicle k do not serve customer j. Due to constraints
(6), each product required by a customer is brought
by one single vehicle. Constraints (7) ensure the vehi-
cle compartment capacities are respected. Constraints
(8) states that a vehicle k cannot arrive at j before s
ik
+ t
i j
if it is traveling from i to j. Constraints (9) al-
low customer deliveries within a given time windows.
Constraints (10) ensure that a customer is visited if
HybridAlgorithmforSolvingtheMulti-compartmentVehicleRoutingProblemwithTimeWindowsandProfit
325

and only if the collected profit exceed a given profit
lower bound. Constraints (11) set x
i jk
to 1 if and only
if edge (i,j) is traversed by vehicle k. Constraint (12)
set y
jk p
to 1 if and only if customer j receives product
p from vehicle k, 0 otherwise.
3 HYBRID APPROACH
In this section, two meta-heuristics will be combined
(e.g. The Genetic Algorithm (GA) and the Iterated
Local Search (ILS)), to identify a good feasible solu-
tion to our MCVRP with time windows and profit.
3.1 Genetic Algorithm
Genetic Algorithms (GA) are general-purpose search
algorithms that use principles inspired by natural pop-
ulation genetics to evolve solutions to problems (Her-
rera et al., 1998). The GA is used since large number
of studies is adopting the GA in routing problem. The
GA is in fact a population based meta-heuristic. It is
based on the natural mechanism applied to a set of
chromosomes (e.g. candidate solution). Indeed, the
algorithm starts with the generation of the initial pop-
ulation. In each iteration, the chromosomes are evalu-
ated based on a fitness function and then two chromo-
somes are selected by using a selection method. Af-
ter that, the selected chromosomes are altered using
genetic operators. The first one is crossover which
combines two parents to create two new offsprings.
The second one is mutation which alters one or more
gene from the offspring to ensure the population di-
versity. At the end, the new offsprings are evaluated
and inserted back in the population. This process is
repeated until a stop condition is met.
3.2 Iterated Local Search
The Iterated Local Search (ILS) approach, intro-
duced by Lourenco et al. in 2003, is used to solve
several combinatorial optimization problems, espe-
cially the routing problems. Compared with other
meta-heuristics such as, Particle Swarm Optimization
(PSO), Simulated Annealing (SA) and Genetic Algo-
rithm (GA), the ILS approach seems to be the most
competitive. The ILS alternates the local search phase
around the incumbent solution and the perturbation
phase, to diversify the search and to escape from local
optima. The algorithm starts its search from an initial
solution S
0
obtained randomly or returned by a greedy
heuristic. The local search procedure is build to ob-
tain a first local optimum. Iteratively, the perturbation
is applied to the current local optimum in order to im-
prove the solution. The algorithm is stopped when a
termination condition is met. The pseudo code of the
ILS approach (Grosso et al., 2009) is depicted in the
following algorithm:
Begin
s0= Generate initial solution;
s*= Local Search (s0);
repeat
s’= Perturbation (s*,history);
s*’= Local Search (s’);
s*= Acceptance criterion (s*,s*’,history);
until termination condition is met;
End.
3.3 Genetic Algorithm with Iterated
Local Search
We propose an hybrid approach combining the GA
and the ILS. Our approach is argued by the fact that
the GA may not converge to a global optimum, in ad-
dition the Local Search procedure may quickly fall in
a local optimum. The main idea behind the hybridiza-
tion is to improve the GA solutions by using an ILS
to intensify the search space. In what follows we will
use the GA to find the best solution having the least
traveling cost and which satisfy the temporal and ca-
pacity constraints, whereas the ILS is used to refine
the GA solution and consider the collected profit con-
straint. The pseudo code of the hybrid approach is as
follows:
Begin
Initialize population
Evaluate each candidate;
repeat
Select parents;
Recombine pairs of parents: Crossover;
Mutate the resulting offspring;
Apply ILS to the offspring;
Evaluate new candidates
Replacement candidates for the next generation
until termination condition is met;
End.
3.3.1 Solution Representation
When designing a GA, the representation of each can-
didate (e.g.chromosome) in the population is an ele-
mentary point. In our approach a solution x (i.e. chro-
mosome, candidate) is represented by using a vector
V(x). This vector is a permutation of nodes (cus-
tomers), which tries to insert an order in the current
route, while non violating the temporal and capacity
constraints.
3.3.2 Selection and Crossover
The selection of chromosomes is a crucial step for the
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
326
the behaviour of the GA process to generate a
new population. Several selection methods have
been proposed in the literature, for instance the
roulette wheel selection, binary tournament method,
stochastic universal sampling, rank selection and
some others. To randomly select a parent seems
to be a non efficient method. Hence, we use the
same selection method introduced by Reeves in 1995
(Reeves, 1995). In this method, a parent is selected
according to the following probability distribution:
P(S)=
2S
M(M+1)
where S is the S-th chromosome ranked in a descend-
ing order of its objective value (e.g. traveling cost)
and M is the population size. In other words, the chro-
mosome with the best objective value (e.g. the least
cost) has a higher probability to be selected. After
the selection of two parents P1 and P2, the crossover
operation tries to swap parts of two parents in the
population to generate new offsprings (Derbali et al.,
2012). There are many ways to apply the crossover,
and which may affect the performance of the GA. In
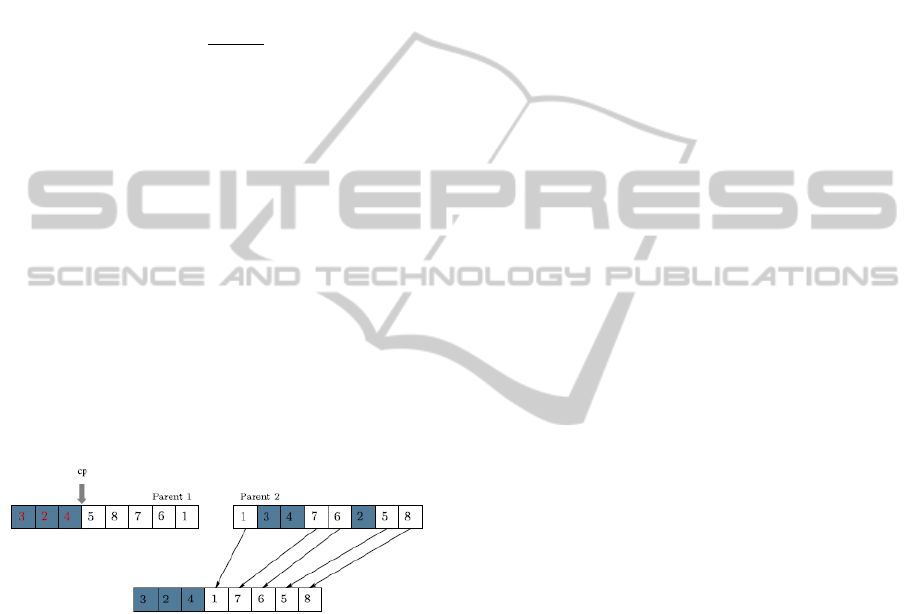
our approach , one cutting point i such that 1 ≤ i ≤ ρ
is randomly drawn where ρ is the number of requests.
The subsequence of a chromosome is copied from the
first parent till this point, the second parent is than
scanned and the missed customers are added (Derbali
et al., 2012). An example of the crossover operation
with a crossover point cp = 3 is depicted by figure.1.
Figure 1: Example of crossover operation.
3.3.3 Mutation
This operator is important to escape from local optima
since it contributes to the diversification in the popu-
lation . The mutation process consists in removing a
customer at random and then adding a random cus-
tomer at a random position. This may lead to explore
new solutions .
3.3.4 Local Search
The Local search (LS) is the first step in an Iterated
Local Search (ILS) approach. The initial solution of
the LS is chosen randomly or by using a metaheuris-
tic. The LS consists in generating a local optimum
solution due to the neighborhood exploration of the
initial solution. The choice of the neighborhood is
one of the important parameter when designing a LS.
The neighborhood can be defined as a modification
of the initial solution to reach a new better solution.
The main focus of the LS in our approach is to
find a solution with a minimum traveling cost and a
collected profit not low than a preset profit bound. In
other words, we will search for solutions that satisfy
the profit constraint. In our hybrid approach, we use
three neighborhoods including insertion move, swap
move and relocate. The neighborhoods are defined as
follows:
For the neighborhood N1, we insert a request
which is not satisfied in the current solution, and
which have a collected profit better than the worst
profit of a given customer in the current solution.
Given a route, the nodes which violate the profit con-
straint are removed and replace by a new sequence of
requests.
Neighborhood N2 applies the 2-opt move, which
consists of replacing two non-adjacent nodes belong-
ing to two different routes, by two non visited nodes.
The temporal, capacity and profit constraints should
be satisfied.
Neighborhood N3 address the swap move inside
the same route. More precisely, we consider one
route and swap the position of two nodes belonging
to this route.
After the definition of the LS neighborhoods, the
LS process is as follows: given an initial solution x
(e.g. provided by the GA), we improve x according
to N1 until we found a solution x1 that can not be
improved. x1 is the generated local optimum which
is considered as the initial solution for the new LS
using N2. We proceed in the same way with N3. This
process is repeated until a local optimum is reached.
3.3.5 Perturbation
The first motivation of the ILS algorithm is based
on the perturbation operator which is a large random
move of the current solution. In fact, the process of
the perturbation consists in modifying the current lo-
cal optimum found by the LS, in order to obtain a
new solution. We modify a solution by applying the
swap move. We interchange two random selected cus-
tomers (e.g.nodes) belonging to two different routes.
3.3.6 Evaluation Function
In any GA approach, the chromosomes are compared
HybridAlgorithmforSolvingtheMulti-compartmentVehicleRoutingProblemwithTimeWindowsandProfit
327
thanks to their evaluation functions. In this paper, this
function is the total traveling cost of a vehicle which
leaves the depot, serves customers demands and re-
turn to the depot.
3.3.7 Replacement
The replacement operation consists in keeping the
population size fixed. It is the last operation in the hy-
brid approach. After the creation of the offspring by
using all the previous phases (i.e GA operators and
ILS phases), it is compared with the worst chromo-
some in the population and then the best one is kept.
4 PRELIMINARY RESULTS
The proposed approach will be tested on a set of in-
stances issued from the well known Solomon’s data
set (Solomon, 1987). Since no MCVRP with time
windows instances are available in the literature, a
known instances have been transformed to deal with
our proposed approach. In fact, the data set con-
tains 56 problems divided into 6 instances: C1, R1,
RC1,C2, R2 and RC2. Each instance contains 100
customers and a depot. Each customer i has an as-
sociated demand d
i
and a time windows [a
i
,b
i
]. The
proposed MCVRP with time windows and profit in-
stances are generated as follows. The number of com-
partments m for each vehicle is set to 2. The cus-
tomer request is divided randomly into two parts (El
Fallahi et al., 2008). For each customer i the request
for product 1 is calculated as d
i1
= d
i
/λ, where λ is a
random integer in [3,5]. The request for product 2 is
calculated as d
i2
= d
i
− d
i1
. The compartment capac-
ity is computed as Q
p
= (Q × D
n
)/(D
1
+ D
2
), where
Q is the vehicle capacity in the original VRPTW
(Solomon, 1987) and D
p
is the average demand for
a product p. The profit π
ip
is set to 1 for each request.
The number of the vehicles is equal to 3.
The proposed approach will be coded in C and will be
tested on an Intel Core I5 with 1.70 GHz. The exper-
iments will be carried out and we will compare our
proposed approach with some results from the litera-
ture, in order to assess the efficiency of the proposed
approach.
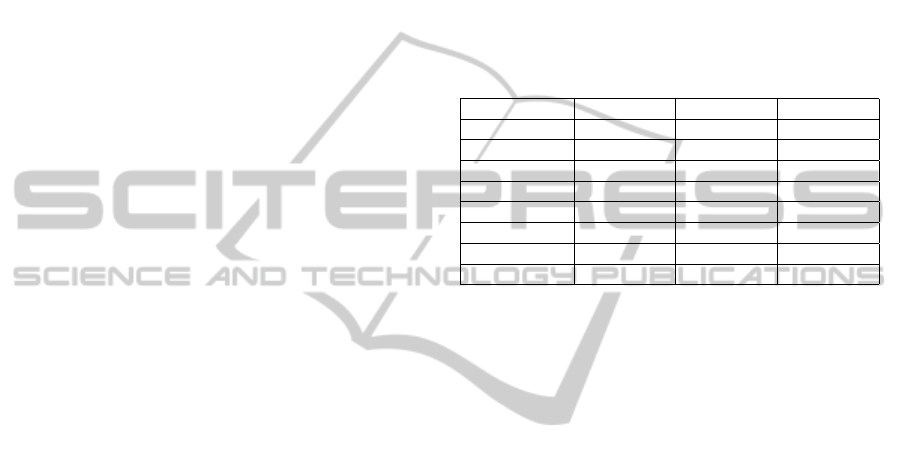
Table 1 presents the average travel costs results
obtained for each instance and the average CPU time
for all the instances according to the number of ve-
hicles. The first column contains the name of the in-
stance and the other columns contain the travel cost
for one, two and three vehicles. The table 1 shows that
the travel cost value increases when the number of ve-
hicles increases and that the problem can be solved
within a reasonable time.
It is difficult to provide a detailed analysis at this mo-
ment since there are no solutions to compare with.
However, in comparison with the solutions found by
Fallahi et al. (2008) (e.g. the average cost is equal
to 998.645 and the average time is equal to 140.28),
our preliminary results are close to the optimal best
known solutions. Further extensive experiments will
be carried out and we will compare our proposed ap-
proach with some results from the literature, in order
to assess the efficiency of the proposed approach.
Table 1: Average results of the MCVRP with time windows
and profit.
Instances Cost(m=1) Cost(m=2) Cost(m=3)
C1 42.3 612.2 756
C2 1170.7 1228.4 1331.1
R1 924.2 1055.7 1225.7
R2 559.8 759.2 929.3
RC1 752.3 932.1 796.1
RC2 870.8 998.4 1200.2
Avg cost 803.35 931 1093.73
Avg Time(s) 87.7 145.5 220.8
5 CONCLUSION
This paper introduces a research work dealing with
the MCVRP with time windows and profit as con-
straints. Despite its important practical applications,
this problem is not yet studied in the literature. It
is encountered in a daily distribution of groceries to
convenience stores. The proposed work presents a
first study, in terms of problem formulation (i.e. to
consider time windows and collected profit as con-
straints), and in terms of problem resolution. In
fact, an hybrid approach was developed to address
the problem. The mixture exploits the usefulness of
ILS in diversifying the genetic search and improving
the GA population. More precisely, The GA is used
to generate a solution with a minimum total travel-
ing cost, while an ILS is used to optimize the latter
solution, in which the temporal, capacity and profit
constraints are satisfied. To asses the efficiency, of
our proposed approach, we will compare it to a well-
known benchmarks from the literature. Further re-
search will be focused on more experiments and com-
parison with other solution approaches.
REFERENCES
Aras N., Aksen D., Tekin M. T., (2011). Selective multi-
depot vehicle routing problem with pricing. Trans-
portation Research Part C: Emerging Technologies.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
328

Chajakis E. D., Guignard M., (2003). Scheduling deliveries
in vehicles with multiple compartments. Journal of
Global Optimization.
Cornillier F., Laporte G., Boctor F. F., Renaud J., (2009).
The petrol station replenishment problem with time
windows. Computers & Operations Research.
Cornillier F., Boctor F. F., Laporte G., Renaud J., (2008).
A heuristic for the multi-period petrol station replen-
ishment problem. European Journal of Operational
Research.
Cornillier F., Boctor F. F., Renaud J., (2012). Heuristics for
the multi-depot petrol station replenishment problem
with time windows. European Journal of Operational
Research.
Derbali H., Jarboui B., Hanafi S., Chabchoub H., (2012).
Genetic algorithm with iterated local search for solv-
ing a location-routing problem. Expert System with
Applications.
El Fallahi A., Prins Ch, Calvo R. W. (2008). A memetic al-
gorithm and a tabu search for the multi-compartment
vehicle routing problem. Computers & Operations
Research.
Feillet D., Dejax P., Gendreau M. (2001). Traveling Sales-
man problems with profits: An overview. Transporta-
tion Science.
Grosso A., Jamali A., Locatelli M., (2009). Finding max-
imin latin hypercube designs by iterated local search
heuristics. European Journal of Operational Re-
search.
Herrera F, Lozano M, Verdegay J. L., (1998). Tackling
Real-Coded Genetic Algorithms: Operators and Tools
for Behavioral Analysis. Artificial Intelligence Re-
view.
Hvattum L. M., Fagerholt K., Armentano V. A., (2009).
Tank allocation problems in maritime bulkshipping.
Computers & Operations Research.
Lahyani R., Coelho L. C., Khemakhem M., Laporte G.,
(2015). A multi-compartment vehicle problem aris-
ing in the collection of olive oil in Tunisia. Omega
Laurenco M., Martin O., Stutzle T., (2003). Iterated local
search. Handbook of metaheuristics of international
series in operations research & management science.
Muyldermans L., Pang G. (2010). On the benefits of co-
collection: Experiments with a multi-compartment
vehicle routing algorithm. European Journal of Op-
erational Research.
Oppen J., Lokketangen A. (2008). A tabu search approach
for the livestock collection problem. Computers &
Operations Research.
Reed M., Yiannakou A., Evering R. (2014). An ant colony
algorithm for the multi-compartment vehicle routing
problem. Applied Soft Computing.
Reeves, C. (1995). Modern heuristic techniques for combi-
natorial problems. McGraw-Hill Book Company Inc.
Relvas S., Magat
˜
ao S. N. B., Barbosa-P
´
ovoa A. P. F. D.,
Neves Jr. F., (2014). Integrated scheduling and inven-
tory management of an oil products distribution sys-
tem. Omega.
Solomon M. M., (1987). Algorithms for the vehicle rout-
ing and scheduling problems with time window and
constraints. Operations Research.
Stalhane M., Rakke J. G., Moe C. R., Andersson H., Chris-
tiansen M., Fagerholt K., (2012). A construction and
improvement heuristic for a liquefied natural gas in-
ventory routing problem. Computers & Industrial En-
gineering.
Valle C. A., Martinez L. C., Da Cunha A. S., Mateus G.
R. (2011). Heuristic and exact algorithms for a min-
max selective vehicle routing problem. Computers &
Operations Research.
HybridAlgorithmforSolvingtheMulti-compartmentVehicleRoutingProblemwithTimeWindowsandProfit
329
