
GA-based Action Learning
Satoshi Yonemoto
Graduate School of Information Science, Kyushu Sangyo University, Fukuoka, Japan
Keywords: Genetic Algorithm, Action Learning and Action Series Learning.
Abstract: This paper describes a GA-based action learning framework. First, we propose a GA-based method for
action learning. In this work, GA is used to learn perception-action rules that cannot be represented as genes
directly. The chromosome with the best fitness (elitist) acquires the perception-action rules through the
learning process. And then, we extend the method to action series learning. In the extended method, action
series can be treated as one of perception-action rules. We present the experimental results of three
controllers (simple game AI testbed) using the GA-based action learning framework.
1 INTRODUCTION
This paper describes a GA-based action learning
framework. First, we propose a GA-based method
for action learning. And then, we extend the method
to action series learning. This work focuses on the
following problem: Action learning method is
certainly suitable for estimating reactive actions.
Obstacle avoidance is one of such reactive actions.
In this case, the preceding action occurs just as the
direct result of 'avoidance'. However, just a
perception-action rule does not always solve more
complicated tasks. In general, a task (for one agent)
should be completed by performing the combination
of action series. For solving this problem, we
propose a new method that can include action series
under the same GA-based learning framework.
Action learning framework is often used in
artificial intelligence for games (called Game AI)
(Togelius, 2010) (Shaker, 2011) (Yannakakis, 2012),
and in autonomous robot simulations (Gu, 2003)
(Brooks, 2014) (Siegwart, 2011). Recently, human-
like character (avatar) in computer games can be
controlled by various AI engines. Autonomoous car
is also controlled by AI engine, using the same
learning framework. The above mentioned, complex
action is not performed by just one action associated
with a perception data. For example, human-like
character performs manipulation tasks in virtual
environment, their action rules are often hand-coded
(Kuffner, 1998), and it is difficult to learn such action
series by perceiving real human activities.
Therefore, we tackle to develop a new method to
acquire action series from the percaptual data. GA-
based learning is one way to acquire action rules in
non-parametric manner. In the other learning
approach, a convolutional neural network is often
used (Mnih, Volodymyr, et al., 2015). In the GA based
learning, the model is perception-action rules (i.e.,
table), learned with the evolution process. GA based
learning has the following merits. Action rule for
each perception is not formed as a block box.
Therefore, large and sparse table can be slimmed
after the learning process.
2 GA-BASED LEARNING
2.1 Genetic Algorithm
Genetic Algorithm (GA) is an optimization
technique that globally estimates model parameters.
GA is one of stochastic search methods which have
been applied with success to many types of complex
problems such as image analysis and control
problems. In general, genetic algorithm is performed
the following steps:
1. Generate an initial population (N individuals) by
randomly choosing.
2. Calculate the fitness of the population as an
evaluation process.
3. Select a subset of population under pre-defined
selection criteria.
4. Recombine the selected population as a new
population (genetic operation such as mutation and
crossover).
Yonemoto, S..
GA-based Action Learning.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 293-298
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
293
5. Repeat 2-4 until an elitist condition is satisfied.
In this work, GA is used to learn action rules that
cannot be represented as genes directly. In this
approach, the purpose of GA-based evolution is to
construct a policy for perception-action pair.
Given a perception, an action, and a policy,
the action-value of the pair
under is defined
by
. This corresponds to compute the function
values
for all perception-action pairs
,
using evolutionary computation.
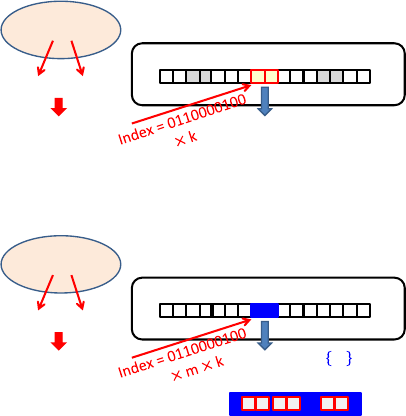
2.2 Genetic Encoding for Action
Learning
Figure 1 illustrates our genetic encoding.
Chromosome represents perception parameters (n
bit binary code). For example, such perception
includes sensor grids around game characters and
range sensors for autonomous robots. In this
encoding, the binary code indicates a number
(index) for the action-value table, (see Figure 1).
The desirable action
for perception
is given
as the value of the table. The action is also defined
by k bit binary code. The genetic algorithm is
performed in three fundamental steps, that is,
evaluation, selection and genetic operation. During
the evaluation process, the fitness of the population
is calculated. The chromosome with the best fitness
(elitist) guides properly the best perception-action
rules.
3 EXTENSION TO ACTION
SERIES LEARNING
3.1 Problem in Action Learning
Although GA-based learning is one of effective
solvers for action learning, there is still another
consideration. This approach is suitable for
estimating reactive actions such as obstacle
avoidance. However, it is just a one-step solver
using perception-action rules
. In general, a
task should be completed by performing the
combination of action series.
Action series learning is an extended version of GA-
based action learning where the evaluation is
performed by several action series. This means that
the perception-action table includes action series
for a perception
. After performing
several action series, the evaluation function is
calculated.
3.2 Genetic Encoding for Action Series
Learning
For chromosome represented by n perception
parameters (n bit binary code), action series
are assigned. Each action
is defined by k bit
binary code. The desirable action series
for a perception
are given as the value of the table.
Figure 2 illustrates the genetic encoding for this
approach.
After action series are performed, the evaluation
function is calculated. Naturally, before performing
all of action series, the task can be completed.
Therefore, maximum length of action series must be
determined in advance. This approach provides a
capable of effectively compressing for candidates of
actions. That is, both action time series and several
candidates of actions can be described in a unified
manner.
Figure 1: Genetic encoding for action learning.
Figure 2: Genetic encoding for our extended approach.
4 EXPERIMENTS
To evaluate our GA-based action learning
framework, three autonomous controllers (simple
game AI testbed) are implemented. These programs
are written in Java. To evaluate an essential GA
evolution, game rules are simplified. Common
genetic parameters are shown in Table 1.
4.1 Case 1: Vehicle Controller
First, our GA-based action learning is applied for a
action (k bit code)
1 0 1 1 1 0 01 0 1 0 1 0 0
・・・ ・・・
1 1
[0,1, 1,0,0,0,0,1,0,0]
perception
(n bit code)
sensory data
environment
k bit2
n
table
action series
(mk bit code)
1 0 1 1 1 0 01 0 1 0 1 0 0
・・・ ・・・
[0,1, 1,0,0,0,0,1,0,0]
perception
(n bit code)
sensory data
environment
mk bit2
n
table
1 0 0 1 1 1
・・
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
294
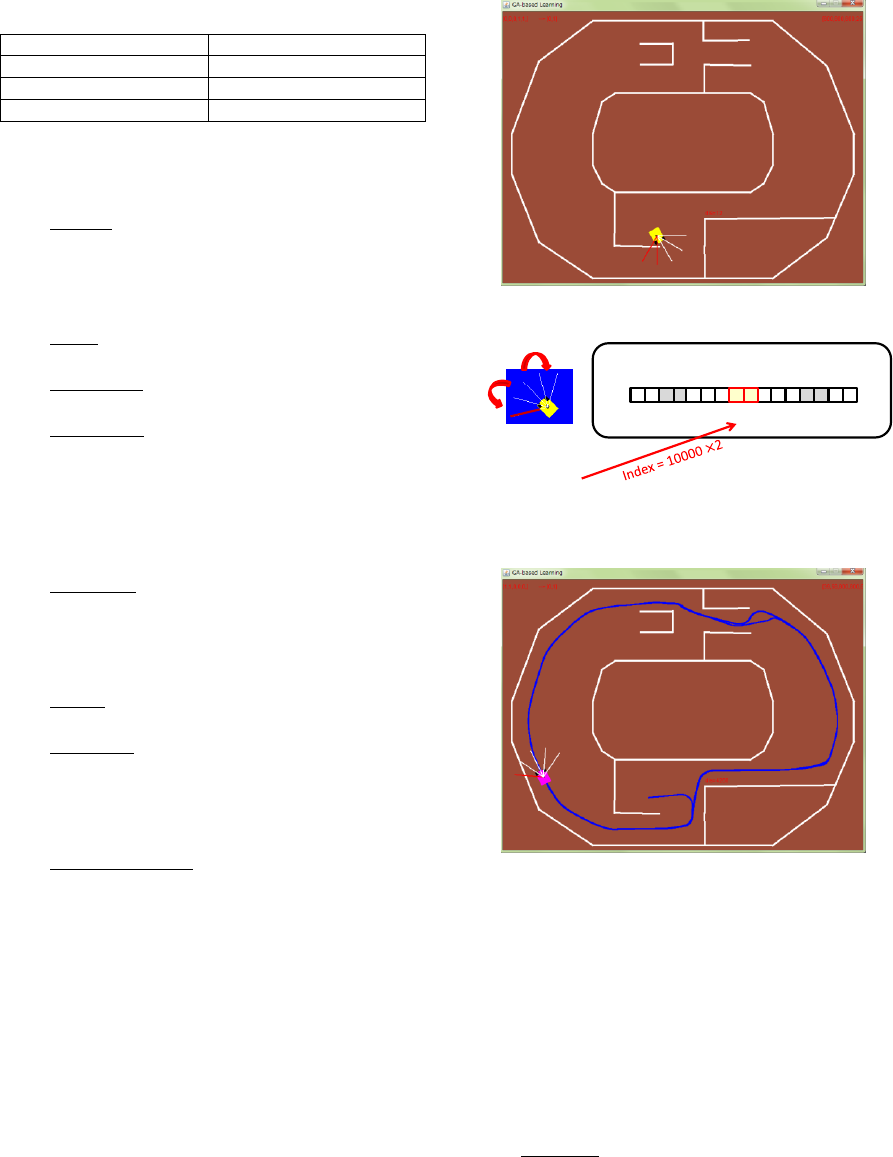
simplified vehicle control problem. Figure 3
illustrates the screenshots.
Table 1: Common genetic parameters.
Population size
100
Crossover rate
0.9
Mutation rate
0.05
Max generations
100
4.1.1 Game Rules
The following rules are applied:
Vehicle: The vehicle can select three
directions: go straight, turn left (-30[deg]) and
turn right (+30[deg]). The vehicle has five
range sensors to detect the neighbour
obstacles (see Figure 4).
Scene: Static obstacles (set of line segments)
are arranged into the scene.
Game over: The vehicle touches one of the
obstacles.
Task (goal): The vehicle keeps a drive during
several laps or until over pre-defined distance.
4.1.2 GA Rules
For genetic encoding, the following rules are
defined:
Perception: Five range sensors are attached to
detect obstacles. The sensor is defined by 5 bit
binary code. When the sensor detects an
obstacle (i.e., crossing a line segment), output
is 1, (otherwise output is 0).
Action: Three actions (turn left, turn right and
go straight) are encoded by 2 bit binary code.
Fitness (f): If the vehicle touches an obstacle
(a line segment), then . If the vehicle
keeps a drive during several laps (or pre-
defined distance driving), then
.
Genetic encoding: Perception is defined by 5
bit binary code (n=5). And action is defined
by 2 bit binary code (k=2). The code indicates
a number (index) of
action-value table.
The learning process is equal to fill the table,
satisfying the fitness .
4.1.3 Results
Figure 5 illustrates the results of trajectory of the
elitist. In this case, the trajectory is represented as a
loop line. We demonstrated for several courses, and
we found obstacle avoidance with static scene is
relatively easy. In practical use, solution of obstacle
avoidance which exists dynamic objects is needed.
This solution will show the next Case 2.
Figure 3: Screenshots of vehicle controller.
Figure 4: Genetic encoding for vehicle controller.
Figure 5: Trajectory of the elitist (vehicle controller).
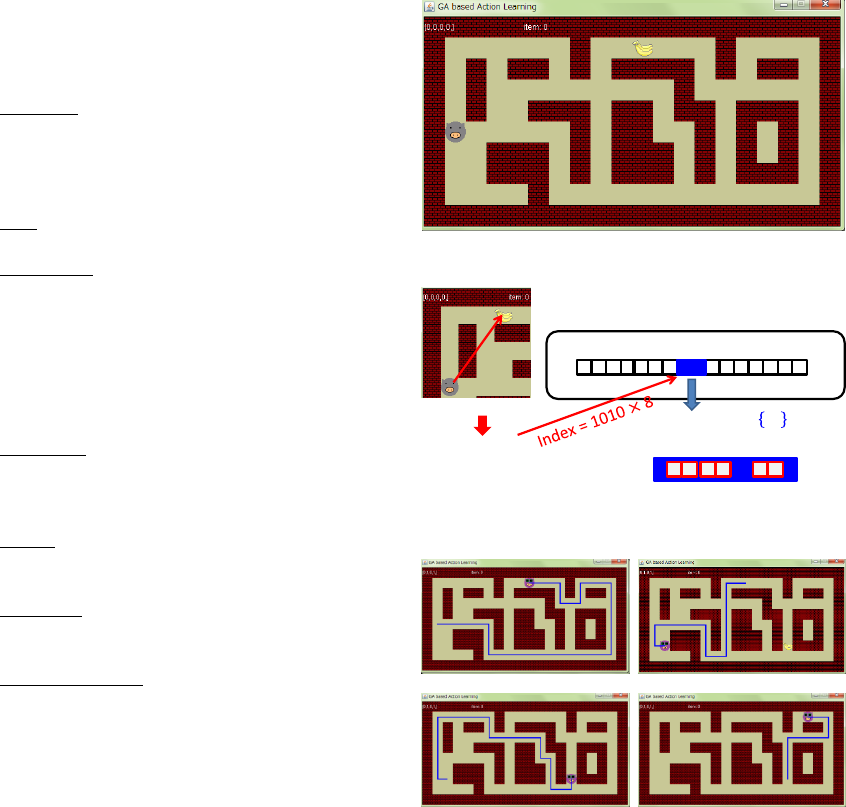
4.2 Case 2: Action Game Controller
Next, our GA-based action learning is applied for
simplified action game, like Nintendo's classic game
Super Mario Bros. Figure 6 illustrates the
screenshots (minimum map size).
4.2.1 Game Rules
The following rules are applied:
Character: The character can typically move
horizontally (left and right) and jump. The
2bit×2
5
table
1 0 1 1 1 0 01 0 1 0 1 0 0
turn right
・・・ ・・・
0 1
[1,0,0,0,0]
vehicle with five
range sensors
right
left
perception
GA-based Action Learning
295

character can walk and run to the right and left
direction. The character can jump onto
obstacles or can jump over holes (gravity acts
on the character).
Scene: Scene length is 5 times screen width.
Side scrolling is applied in accordance to the
character position. Wall blocks, holes,
enemies and flag pole (goal position) are
arranged into the scene (according to the
character position, they appear at their pre-
defined position).
Game over: The character touches enemies or
downs holes.
Task (goal): The character touches flag pole
(reach the goal position).
Figure 6: Screenshots of action game controller.
4.2.2 GA Rules
For genetic encoding, both perception-action rules
and the fitness function must be defined.
Perception: Two sensor grids are used: enemy
sensor and obstacle sensor (Figure 7). These
sensors are defined as the neighbour
cells around the character ( is minimum
grid size). Enemy sensor is defined by 7 bit
binary code. When enemies or holes are
appeared in the neighbour cells, output is 1
(otherwise output is 0). Obstacle sensor is
defined by 5 bit binary code. When wall
blocks are appeared in the neighbour cells,
output is 1 (otherwise output is 0).
Action: Three actions (move left, move right
and jump) are encoded by 2 bit binary code.
Fitness (f): The fitness function is basically
defined as the distance to the flag pole (goal).
Therefore, if the character reaches the flag
pole, then
. If the character touches
one of enemies, then
. If the character
downs a hole, then
.
Genetic encoding: Perception is defined by 12
bit binary code (n=12). And action is defined
by 2 bit binary code (k=2). The code indicates
a number (index) of
action-value table.
The learning process is equal to fill the table,
satisfying the fitness .
Figure 7: Genetic encoding for action game controller.
4.2.3 Results
Figure 8 illustrates the results of trajectory of the
elitist. Although perception represented by
neighbour cells is a slight clue, avoidance actions
with dynamic objects (enemies) are acquired.
Figure 9 illustrates an example of the acquired
action. When an enemy closes with the character
from right to left, the character can avoid it (i.e.,
jumping action after rearward moving).
Figure 8: Trajectory of the elitist (action game controller).
Figure 9: Acquired jumping action after rearward moving.
4.3 Case 3: Map Navigator
Our GA-based learning is extended to learn action
series. In this experiment, our method is applied for
simplified character map navigation (i.e., path
enemy sensor
0
0
0
0
0
0
1
0
0
0
0
0
2bit2
12
table
obstacle sensor
1 0 1 1 1 0 01 0 1 0 1 0 0
right + jump
・・・ ・・・
1 1
[0,0,0,0,0,0,1][0,0,0,0,0]
perception
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
296
finding problem). Path finding problem in maze is
typically realized by another algorithms such as A*
algorithm. In this case, it assumes that the character
does not have any map information (i.e., a graph) to
solve it. This restriction is often used in
reinforcement learning. Figure 10 illustrates the
screenshots.
4.3.1 Game Rules
The following rules are applied:
Character: The character can typically move
up, right, down and left (four direction) if he is
on the road in a map. The character can
perceive the direction of an item at a time. The
character can collect the item.
Map: The map is constructed by 20 x 10 wall
blocks. Several items are arranged in the map.
Task (goal): The task is to collect all items in
the map (or to visit all check points). One
episode corresponds to collect an item.
4.3.2 GA Rules
For genetic encoding, the following rules must be
defined:
Perception:
is defined by a signed
vector of the current item direction. They are
represented by 4 bit binary code, (0, 0), (-1,-1),
… , (+1,+1). (See Figure 11).
Action: 4 action series are stored for a
perception. Each action is encoded by 2 bit
binary code (move up, right, down and left).
Fitness (f): If the character can collect an item,
then (then, a new item is set as the
next target).
Genetic encoding: Perception is defined by 4
bit binary code (n=4). Each action is defined
by 2 bit binary code. In this case, 4 action
series are defined (m=4), therefore, action
series are defined by bit binary
code. The code indicates a number (index) of
action-value table. The learning
process is equal to the acquisition of the
action-value table, satisfying the fitness f = 1.0.
4.3.3 Results
Figure 12 illustrates the results of trajectory of the
elitist. Four items were successfully acquired in
order (a)-(d) in Figure 12. Moving operations were
properly applied according to just item
direction
.
Figure 13 (a) illustrates a failure in learning
process (m=4). However, applying iterated learning
process, the character could come near the target
item (Figure 13 (b)). We found that augmenting
action series eliminates this failure (m is more than
5). Figure 13 (c) shows the successful case (m=5).
According to the task level, the length of action
series should be defined.
Figure 10: Screenshots of map navigator.
Figure 11: Genetic encoding for map navigator.
(a) (b)
(c) (d)
Figure 12: Trajectory of the elitist (map navigator).
5 CONCLUSIONS
We have proposed a GA-based action learning
framework. In our framework, GA is used for
learning perception-action rules as a table. In the
experiments, first, we have demonstrated vehicle
controller to solve static object avoidance problem.
Next, we demonstrated action game controller for
action series
(8 bit code)
1 0 1 1 1 0 01 0 1 0 1 0 0
・・・ ・・・
[1,0, 1,0]
perception
(4 bit code)
( )
8 bit×2
4
table
1 0 0 1 1 1
・・
GA-based Action Learning
297
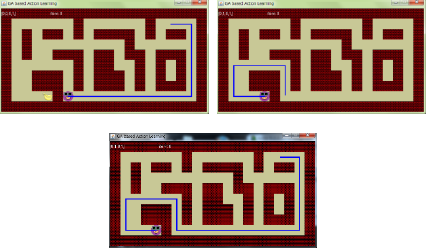
(a) (b)
(c)
Figure 13: Influence on the length of action series.
dynamic object avoidance. The genetic encoding
was performed by constructing a
action-
value table. Larger table is necessary to extend
sensor grid size and to add various actions. However,
we think that it can be solved as one of
implementation issues. This approach is effective,
but is just applicable for such object avoidance
problem. Therefore, we proposed a new method that
considers action series under the same GA-based
learning framework. In the experiments, we showed
that map navigator is successfully performed using
action series learning. Especially, our extended
approach is able to acquire action series (4 set of
moving operations) from the slight perceptual data.
This approach provides a capable of effectively
compressing for candidates of actions.
Future work includes development of practical
application and more complex action series
acquisition (for action game controller).
REFERENCES
Togelius, Julian, Sergey Karakovskiy, and Robin
Baumgarten, 2010. The 2009 mario ai competition,
Evolutionary Computation (CEC), IEEE Congress on.
IEEE.
Shaker, Noor, et al., 2011. The 2010 Mario AI
championship: Level generation track, Computational
Intelligence and AI in Games, IEEE Transactions on
3.4 : 332-347.
Yannakakis, Geogios N, 2012. Game AI revisited.
Proceedings of the 9th conference on Computing
Frontiers. ACM.
Gu, Dongbing, et al., 2003. GA-based learning in
behaviour based robotics, Computational Intelligence
in Robotics and Automation. IEEE International
Symposium on 3.
Brooks, Rodney A., 2014. The role of learning in
autonomous robots, Proceedings of the fourth annual
workshop on Computational learning theory.
Siegwart, Roland, Illah Reza Nourbakhsh, and Davide
Scaramuzza, 2011. Introduction to autonomous mobile
robots. MIT press.
Kuffner Jr, James J, 1998. Goal-directed navigation for
animated characters using real-time path planning and
control, Modelling and Motion Capture Techniques
for Virtual Environments. Springer Berlin Heidelberg,
171-186.
Mnih, Volodymyr, et al., 2015. Human-level control
through deep reinforcement learning, Nature
518.7540: 529-533.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
298
