raxDAWN: Circumventing Overfitting of the Adaptive xDAWN
Mario Michael Krell
1
, Hendrik W
¨
ohrle
2
and Anett Seeland
2
1
Robotics Research Group, University of Bremen, Robert-Hooke-Str. 1, Bremen, Germany
2
Robotics Innovation Center, German Research Center for Artificial Intelligence GmbH, Bremen, Germany
Keywords:
xDAWN, Spatial Filtering, Online Learning, Electroencephalogram, Event-Related Potential, Brain-Computer
Interface.
Abstract:
The xDAWN algorithm is a well-established spatial filter which was developed to enhance the signal quality
of brain-computer interfaces for the detection of event-related potentials. Recently, an adaptive version has
been introduced. Here, we present an improved version that incorporates regularization to reduce the influence
of noise and avoid overfitting. We show that regularization improves the performance significantly for up to
4%, when little data is available as it is the case when the brain-computer interface should be used without or
with a very short prior calibration session.
1 INTRODUCTION
In brain-computer interfaces (Blankertz et al., 2011;
Zander and Kothe, 2011; van Erp et al., 2012;
Kirchner et al., 2013, BCIs), event-related potentials
(ERPs) in the electroencephalogram (EEG) are quite
often used to deduce informations from the human’s
internal brain state and translate the internal state to
informations that are usable by other systems. Exam-
ples are P300 and error related potentials (Krusien-
ski et al., 2006; Buttfield et al., 2006). In contrast to
the common ERP analysis, many BCIs have to work
on single-trial instead of averaged data. The single-
trial analysis of EEG is very difficult due to the low
signal-to-noise ratio. Here, spatial filtering is a com-
mon approach to enhance the signal-to-noise ratio in
EEG data. Its concept is to linearly combine data from
different sensors to a reduced set of so-called pseudo
channels with reduced noise level. For ERP-based
BCIs, usually only one pattern is relevant and has to
be detected. One approach is to concatenate the ERP
data samples and look for some periodic behaviour as
done by the PiSF and its variants (Ghaderi and Kirch-
ner, 2013). A different approach is adopted by the
xDAWN algorithm (Rivet et al., 2009, further details
in Section 2.1). It models the average pattern as a
signal hidden by the noise and the (potential) overlay
of ERPs due to short time distance. The objective of
the filter then is to maximize the signal-to-signal-plus-
noise ratio. Recently, the xDAWN algorithm has been
enhanced by a new version which enables incremen-
tal training at run time (W
¨
ohrle et al., 2015). This
is important for BCIs because the calibration phase
should be as short as possible and the patterns might
change over time. Hence, an additional adaptation is
required.
A different group of spatial filters are derived
from the common spatial pattern algorithm (Blankertz
et al., 2008, CSP). In contrast to the aforementioned
algorithms, the objective of CSP filters is to enhance
the data for two different classes and focuses on the
frequency domain instead of the time domain. To add
further properties to this spatial filter, several regu-
larization methods have been suggested as extensions
(Samek et al., 2012). Regularization methods have
not yet been applied to the xDAWN and this paper is
the first to introduce this method.
In Section 2, we introduce xDAWN and axDAWN
and subsequently we show how to integrate Tikhonov
regularization into the model similar to the approach
for the CSP. In Section 3, the algorithm is evaluated
on EEG data and it is shown that it can improve the
performance, especially when training data is miss-
ing. Finally, we conclude in Section 4.
2 METHODS
This Section first briefly introduces xDAWN and its
adaptive variant. Based on these descriptions after-
wards, we propose the new regularized variant.
68
Krell, M., Wöhrle, H. and Seeland, A..
raxDAWN: Circumventing Overfitting of the Adaptive xDAWN.
In Proceedings of the 3rd International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX 2015), pages 68-75
ISBN: 978-989-758-161-8
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2.1 xDAWN
Let X ∈ R
N
T
×N
S
be the matrix of recorded data, where
N
T
is the total number of single temporal samples and
N
S
is the number of sensors. So X
i j
is the record-
ing of the j-th sensor at the i-th time point. The
ERP is the typical (averaged) electrophysiological re-
sponse to a stimulus. This is modeled with the matrix
A ∈ R
N
E
×N
S
where N
E
is the expected length of the
ERP and it is usually chosen between 600 and 1000
milliseconds. To model the data based on A, an addi-
tional noise matrix N ∈ R
N
T
×N
S
and a Toeplitz matrix
D ∈ R
N
T
×N
E
are required. For every time point, where
an ERP pattern is expected to start, a 1 is added to D
at the respective time index in the first column. For
the other columns the entry is continued to have a di-
agonal of ones, as it is common for Toeplitz matrices.
The summarizing formula of the xDAWN data model
then reads
X = DA + N . (1)
The first step is to obtain a least squares estimate
of A:
ˆ
A = argmin
A
k
X −DA
k
2
= (D
T
D)
−1
D
T
X . (2)
If there is no overlap of ERPs,
ˆ
A is equal to
the averaged signal (D
T
X). The second step of the
xDAWN modeling process is to define the objective
of constructing a filter vector ˆu which maximizes the
signal-to-signal plus noise ratio with the generalized
Rayleigh quotient
1
ˆu = arg max
u∈R
N
S
u
T
ˆ
A
T
D
T
D
ˆ
Au
u
T
X
T
Xu
. (3)
The third step to solve the optimization problem
is a combination of QR decomposition and singular
value decomposition applied to the matrices in the op-
timization problem. For further details, we refer to
(Rivet et al., 2009). Note that the Generalized Eigen-
value Decomposition is a common approach to solve
the Rayleigh quotient optimization problem. The re-
sult is a set of filters which is sorted by their “quality”
where quality is measured by the absolute value of the
eigenvalue.
1
The original definition used a filter matrix U and traces
for both parts of the coefficients but the original solution
approach refers to the respective eigenvalue problem which
would only be appropriate for our definition. For other di-
mensionality reduction algorithms, the definition is similar
(e.g., Fisher’s linear discriminant (Mika et al., 2001)).
2.2 axDAWN: Adaptive xDAWN
The axDAWN algorithm tackles the implementation
part with a different approach. The main motivation
of the axDAWN algorithm (W
¨
ohrle et al., 2015) is
that the xDAWN algorithm is not applicable for online
learning due to its batch optimization (W
¨
ohrle et al.,
2013). It has high memory consumption and it can-
not be implemented on a small device with limited
resources. Note, that X and D would grow linearly
over time.
With each incoming sample, axDAWN updates
several matrices, which all have constant dimensions
over time. Let t be the new time point and all relevant
matrices be already calculated for t − 1, and let x(t)
be a new data sample with the respective row d(t) in
D. If there is no overlap of ERPs,
ˆ
A(t) can be cal-
culated directly as the running average. Otherwise,
(D
T
X)(t) ∈ R
N
E
×N
S
is updated by
(D
T
X)(t) = d(t)
T
x(t) + (D
T
X)(t − 1), (4)
the new matrix
H(t) := (D
T
D)
−1
(t) ∈ R
N
S
×N
S
(5)
is introduced, and the Sherman-Morrison-Woodbury
formula (Golub and Van Loan, 1996) is used to update
H(t)
H(t) = H(t −1)
H(t − 1)d(t)d
T
(t)H(t − 1)
1 + d
T
(t)H(t − 1)d(t) .
(6)
Combining both, we get
ˆ
A(t) = H(t)· (D
T
X)(t). (7)
It furthermore holds
(D
T
D)(t) = (D
T
D)(t −1) + d(t)
T
d(t) and (8)
R
2
(t) := X(t)
T
X(t) = R
2
(t −1)+x(t)
T
x(t) ∈ R
N
S
×N
S
.
(9)
Taking everything into consideration, the formulas
can be used to calculate
R
1
1
(t) :=
ˆ
A(t)
T
(D
T
D)(t)
ˆ
A(t) ∈ R
N
E
×N
S
. (10)
Note, that R
2
(t) and R
1
1
(t) are part of the original
optimization problem
argmax
u
u
T
R
1
1
(t)u
u
T
R
2
(t)u
, (11)
but they are calculated incrementally. The inverse of
R
2
(t) can also be calculated incrementally exactly as
for H(t) in Equation (6). The primal eigenvector u
1
(t)
can now be updated using a recursive least squares
approach (Rao and Principe, 2001)
raxDAWN: Circumventing Overfitting of the Adaptive xDAWN
69
ˆu
1
(t) =
u
1
(t − 1)
T
R
2
(t)u
1
(t − 1)
u
1
(t − 1)
T
R
1
1
(t)u
1
(t − 1)
R
2
(t)
−1
R
1
1
(t)u
1
(t − 1).
(12)
For numerical reasons ˆu
i
has to be normalized to
u
i
(t) =
ˆu
i
(t)
k
ˆu
i
(t)
k
2
(13)
and is later on denormalized. For the lower order
filters a deflation technique is used which basically
projects the matrix R
1
to a subspace which is invari-
ant to the higher filters:
R
i
1
(t) =
I −
R
i−1
1
(t)u
i−1
(t)u
i−1
(t)
T
u
i−1
(t)
T
R
i−1
1
(t)u
i−1
(t)
!
R
i−1
1
(t),
(14)
where I ∈ R
N
S
×N
S
denotes the identity matrix. The
respective formula for the filter update is
ˆu
i
(t) =
u
i
(t − 1)
T
R
2
(t)u
i
(t − 1)
u
i
(t − 1)
T
R
i
1
(t)u
i
(t − 1)
R
2
(t)
−1
R
i
1
(t)u
i
(t − 1).
(15)
Note, that the resulting filters are not the solutions
of the original optimization problem but they show a
very fast convergence (Rao and Principe, 2001) and
so usually result in approximately the same filters as
for the original xDAWN (W
¨
ohrle et al., 2015).
The remaining step is the initialization of param-
eters. Rao et al. provide no information about the
initialization. Woehrle et al. initialized the filters with
small random numbers,
ˆ
A(0), R
1
1
(0) and R
2
(0) with
zero entries and in the implementation, R
2
(0)
−1
was
initialized with
1
4
I. Note, that R
2
(0)
−1
is not the exact
inverse of R
2
(0).
2.3 raxDAWN: Regularized axDAWN
In contrast to the xDAWN, the CSP is defined as the
filter maximizing
ˆu = arg max
u
u
T
Σ
1
u
u
T
(Σ
1
+ Σ
2
)u
(16)
where Σ
k
is the covariance matrix of data belonging to
class k. So (Σ
1
+ Σ
2
) in the denominator can be seen
as the counterpart to R
2
(t), modeling the total signal
variance. But in the nominator the variance related to
one single class is optimized in contrast to the signal
estimate for the xDAWN, which is related to the ERP
class. Adding the Tikhonov regularization
λ
k
u
k
2
(17)
to the denominator in the CSP optimization problem
is supposed to come with a “mitigation of the influ-
ence of artifacts and a reduced tendency to overfitting
as filters with large norm are avoided.” (Samek et al.,
2012). Due to the model similarities, it is reasonable
to apply the same scheme to the xDAWN model defi-
nition to obtain a regularized version
ˆu = arg max
u
u
T
ˆ
A
T
D
T
D
ˆ
Au
u
T
X
T
Xu + λ
k
u
k
2
= argmax
u
u
T
R
1
1
(t)u
u
T
(R
2
(t) + λI)u.
(18)
Similar approaches have also been used for other
filters like Discriminative Spatial Patterns (Liao et al.,
2007, DSP) and Kernel Fisher Discriminant Analysis
(Mika, 2003, KFDA). The xDAWN algorithm cannot
be used to implement the regularized variant, because
it utilizes the QR decomposition of X and it is not
based on X
T
X. But the modification of the axDAWN
algorithm is straightforward: R
1
1
(0) has to be initial-
ized with λI instead of zeros and
R
1
1
(0)
−1
= λ
−1
I . (19)
Consequently, modifying the initialization of
axDAWN in the open source implementation in
pySPACE (Krell et al., 2013) provides an implemen-
tation of raxDAWN. Another direct advantage of
this new algorithm is, that the original initialization
problem of R
2
is solved with the regularization
approach because a very low regularization weight
can be used.
3 EVALUATION
This section describes different experiments on EEG
data to show some properties of raxDAWN and to
compare it with xDAWN and axDAWN.
3.1 Data
For the offline evaluation, we used the same data as
in (W
¨
ohrle et al., 2015). Six subjects participated in
the study on two different days (two sessions). On
each day subjects repeated an oddball experiment five
times (five sets). Each recording contains data from
120 rare and important stimuli which elicit an ERP
(P300) and around 720 irrelevant stimuli which were
used for the noise and as the second class for the re-
spective classification task. Further details are pro-
vided in (Kirchner et al., 2013).
For the evaluation, we took the first of the five
recordings of each day and subject for training an
the remaining four jointed sets for testing. No online
learning was used in the testing phase.
NEUROTECHNIX 2015 - International Congress on Neurotechnology, Electronics and Informatics
70
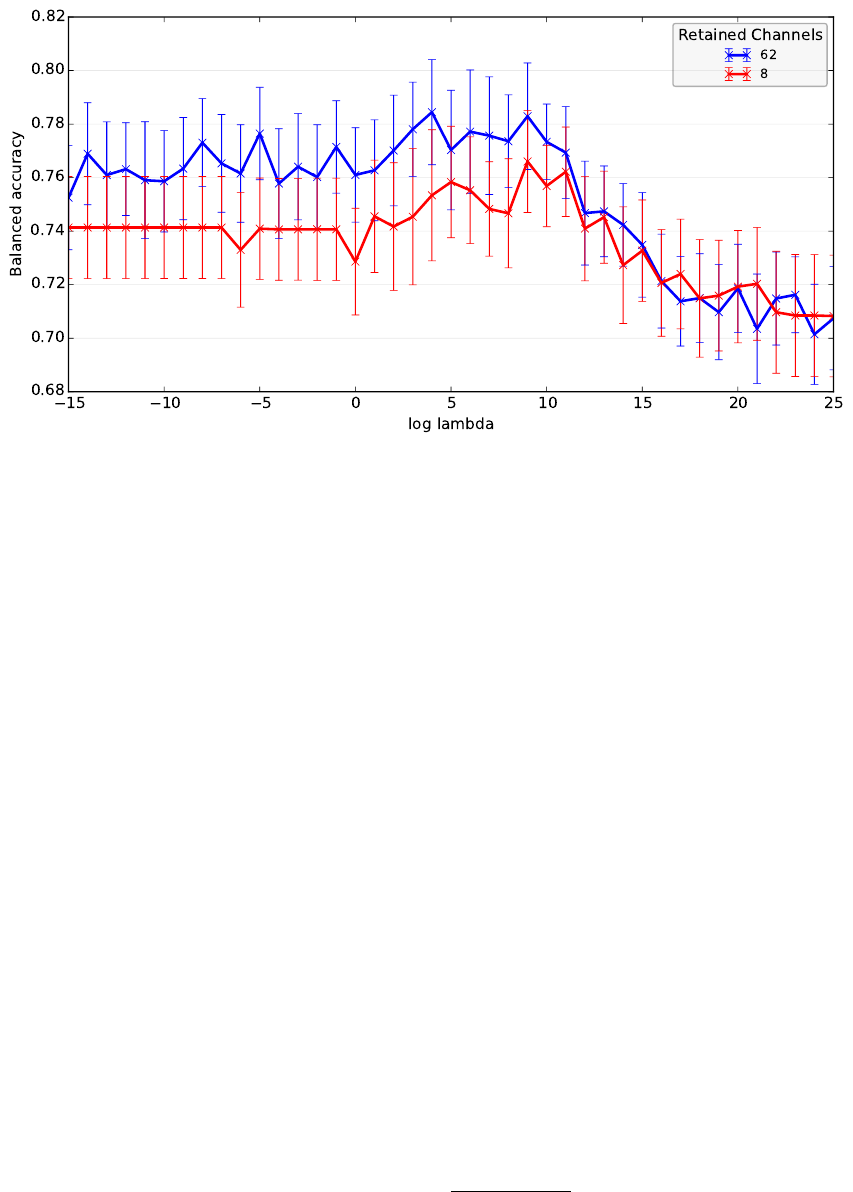
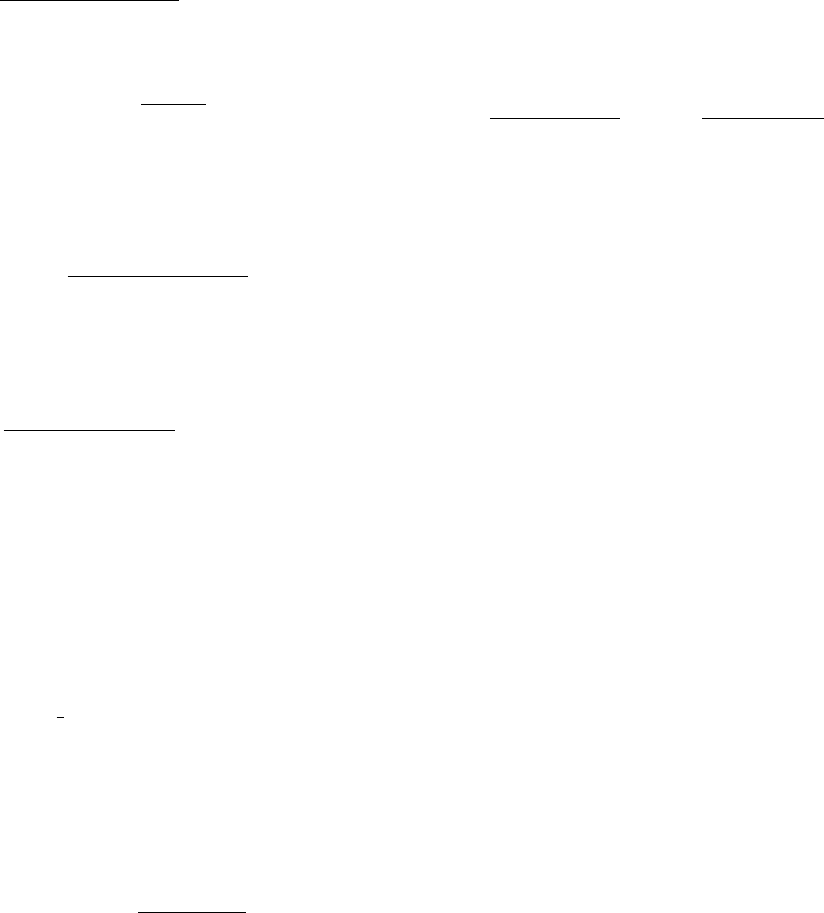
Figure 1: Mean performance traces (with standard error) of raxDAWN for 8 (red) and 62 (blue) retained pseudo channels
dependent on the regularization parameter (2
log lambda
).
3.2 Processing
The general processing scheme was taken from
(W
¨
ohrle et al., 2015). The open source software
pySPACE (Krell et al., 2013) was again used for im-
plementation. The data was cut into segments of one
second after the stimuli. For the first noise cancel-
lation before the application of the spatial filter, we
performed a z-score standardization, decimation to
25 Hz, and a lowpass filter with a cutoff frequency
of 4 Hz. After the spatial filter, straight lines were fit-
ted every 120 ms with a size of 400 ms and the slopes
were used as features. The features were standard-
ized again and the standard support vector machine
(SVM) from the LIBSVM package was used (Chang
and Lin, 2011). The SVM regularization constant was
optimized using a stratified 5-fold cross validation on
the training data
C ∈
n
10
0
, 10
−1
, . . . , 10
−5
o
. (20)
Finally the decision threshold was optimized. As per-
formance measure, we used the balanced accuracy
which is the arithmetic mean of true positive rate and
true negative rate.
For statistical tests, we used the Wilcoxon signed-
rank test.
3.3 Influence of the Regularization
For the first evaluation, we only used the first 24 ERPs
and the respective noise data from the irrelevant stim-
uli for training, since the regularization is expected to
pay off with few data.
In Figure 1, the effect of the regularization param-
eter λ is displayed for the case of no dimensionality
reduction (62 retained channels) and for the reduction
to the most relevant 8 pseudo channels
2
. To obtain a
substantial effect, λ should be chosen larger than 1.
The curves show first an increase in performance due
to the regularization but then the performance drops
drastically because the regularization suppresses the
reduction of the noise and there is only a focus on
signal enhancement. Furthermore, the choice of λ is
very specific for the respective dataset and should be
optimized separately with a logarithmic scaling.
3.4 Influence of the Amount of Training
Data
If there is sufficient data available, the algorithm is not
expected to overfit to much to the noise data. Hence
for a comparison between the filters the number of
used samples needs to be considered.
In this setting, we reduce the dimensionality to 8
pseudo channels and we compare the raxDAWN with
axDAWN and xDAWN for different numbers of train-
ing instances. The data was used till a predefined
number of ERP samples have been reached in the
stream and the respective samples from the irrelevant
2
The large standard error results from the differences be-
tween the 10 evaluations (6 subjects with 2 recoding ses-
sion) and the different optimal λ values.
raxDAWN: Circumventing Overfitting of the Adaptive xDAWN
71
Figure 2: Comparison of spatial filters dependent on the number of training ERP samples (mean performance and standard
error).
Figure 3: Comparison of spatial filters dependent on the number of training ERP samples (mean performance and standard
error).
stimuli were used for the second class and the noise.
For optimizing λ, we used the same 5-fold cross vali-
dation as for the SVM regularization parameter C, but
with two repetitions to better filter out random effects
λ ∈
n
2
−5
, 2
−4
, . . . , 2
15
o
. (21)
So the optimization of the parameter seems a bit more
difficult and dataset specific than the C parameter.
NEUROTECHNIX 2015 - International Congress on Neurotechnology, Electronics and Informatics
72
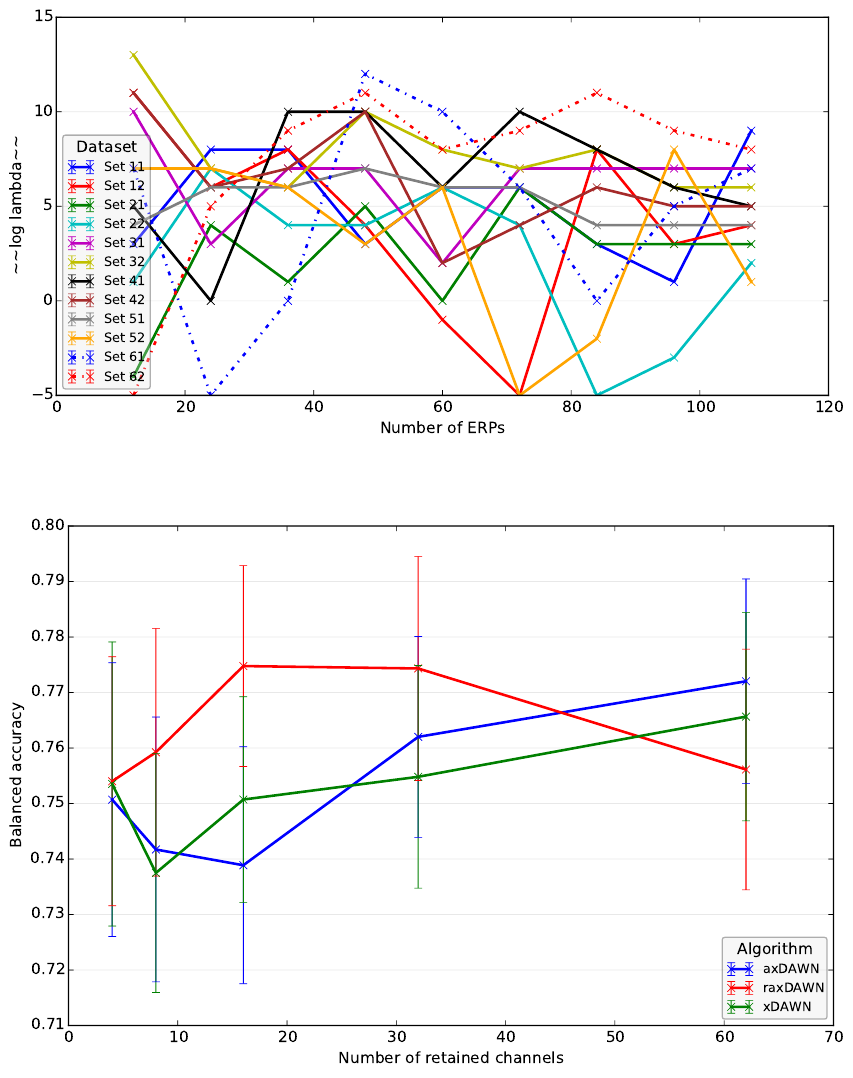
Figure 4: Lambda values chosen by the parameter optimization (2
log lambda
). The first set index corresponds to the subject
number and the second index corresponds to the session number.
Figure 5: Comparison of spatial filters dependent on the number of retained channels (mean performance and standard error).
The results are shown in Figure 2. “New
axDAWN” denotes the raxDAWN with a small regu-
larization parameter of 2
−15
. As expected for all algo-
rithms, performances increase with increasing train-
ing size and axDAWN and xDAWN show approxi-
mately the same performance. Interestingly, the per-
formance of the “new axDAWN” is very close to the
xDAWN due to the improved initialization. If the
complete dataset is used for training, raxDAWN per-
forms similar to (a)xDAWN but for small sizes of the
raxDAWN: Circumventing Overfitting of the Adaptive xDAWN
73
training set (12 or 24 samples of the ERP class) it
clearly outperforms the other spatial filters by 4 or
1% (xDAWN: p = 0.009, aXDAWN: p = 0.003, and
new axDAWN: p = 0.02 for both numbers of sam-
ples). This result is expected, because for a larger
amount of the data the noise should not have such a
high influence anymore. Further, the result is con-
sistent with the findings in (Lotte and Guan, 2010),
where the highest performance increase due to regu-
larization of CSP was achieved when the amount of
available training data was very low.
In Figure 4, the chosen lambda values in the pa-
rameter optimization of the raxDAWN are shown.
The values are diverse and depend on the number of
used ERPs as well as on the dataset. This parame-
ter behavior is unexpected and needs further investi-
gation. A more sophisticated parameter optimization
might result in a more stable choice and even better
performance. The problem of parameter optimiza-
tion can be also observed when Figure 2 is compared
with Figure 3. Figure 3 displays the best performance
value in the cross validation cycle for the parameter
optimization. Here, the raxDAWN shows slightly bet-
ter performance in the cross validation for every num-
ber of used ERPs and not only for the low number.
This difference indicates a parameter overfitting.
3.5 Influence of the Number of Retained
Channels
In this evaluation, we used a reduced number of sam-
ples as in Section 3.3 but varied the number of re-
tained pseudo channels. Again the regularization pa-
rameter of the raxDAWN was optimized. The results
are shown in Figure 5. For a number of 4, there is no
large difference between the algorithms because the
noise has possibly less influence. For 62 channels the
raxDAWN performs slightly worse. For the group of
8, 16, and 32 retained channels, the raxDAWN outper-
forms the other filters by 1− 3% (xDAWN: p = 0.04,
axDAWN: p = 0.02). The other filters show no dif-
ference in performance (p = 0.49).
4 CONCLUSION
In this paper we successfully applied the regulariza-
tion concept for spatial filters to the axDAWN algo-
rithm and introduced the new raxDAWN algorithm.
We evaluated the algorithm on data from a BCI ex-
periment and showed that it improves xDAWN and
axDAWN especially in the initialization when only
few training data is available.
In the future, we would like to analyze other reg-
ularization methods. For example, the first filter from
a previous session or a different subject could be used
for the regularization in a zero training setup instead
of using the filter for initialization as done in (W
¨
ohrle
et al., 2015). Another point is a deeper analyses of
the optimal choice of the regularization parameter to
speed up the optimization. One possibility might be
an online optimization which combines some models
weighted by their accuracy.
ACKNOWLEDGEMENTS
This work was supported by the Federal Min-
istry of Education and Research (BMBF, grant no.
01IM14006A).
We thank Marc Tabie, Yohannes Kassahun and
our anonymous reviewers for giving useful hints to
improve the paper. We thank Su Kyoung Kim for pro-
viding the statistics.
REFERENCES
Blankertz, B., Lemm, S., Treder, M., Haufe, S., and M
¨
uller,
K.-R. (2011). Single-Trial Analysis and Classifica-
tion of ERP Components–a Tutorial. NeuroImage,
56(2):814–825.
Blankertz, B., Tomioka, R., Lemm, S., Kawanabe, M., and
M
¨
uller, K.-R. (2008). Optimizing Spatial filters for
Robust EEG Single-Trial Analysis. IEEE Signal Pro-
cessing Magazine, 25(1):41–56.
Buttfield, A., Ferrez, P. W., and Mill
´
an, J. d. R. (2006). To-
wards a robust BCI: error potentials and online learn-
ing. IEEE transactions on neural systems and rehabil-
itation engineering : a publication of the IEEE Engi-
neering in Medicine and Biology Society, 14(2):164–
8.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM. ACM
Transactions on Intelligent Systems and Technology,
2(3):1–27.
Ghaderi, F. and Kirchner, E. A. (2013). Periodic Spa-
tial Filter for Single Trial Classification of Event Re-
lated Brain Activity. In Biomedical Engineering, Cal-
gary,AB,Canada. ACTAPRESS.
Golub, G. H. and Van Loan, C. F. (1996). Matrix computa-
tions. Johns Hopkins University Press.
Kirchner, E. A., Kim, S. K., Straube, S., Seeland, A.,
W
¨
ohrle, H., Krell, M. M., Tabie, M., and Fahle, M.
(2013). On the applicability of brain reading for pre-
dictive human-machine interfaces in robotics. PloS
ONE, 8(12):e81732.
Krell, M. M., Straube, S., Seeland, A., W
¨
ohrle, H., Teiwes,
J., Metzen, J. H., Kirchner, E. A., and Kirchner, F.
NEUROTECHNIX 2015 - International Congress on Neurotechnology, Electronics and Informatics
74
(2013). pySPACE a signal processing and classifica-
tion environment in Python. Frontiers in Neuroinfor-
matics, 7(40):1–11.
Krusienski, D. J., Sellers, E. W., Cabestaing, F., Bayoudh,
S., McFarland, D. J., Vaughan, T. M., and Wolpaw,
J. R. (2006). A comparison of classification tech-
niques for the P300 Speller. Journal of neural engi-
neering, 3(4):299–305.
Liao, X., Yao, D., Wu, D., and Li, C. (2007). Combining
spatial filters for the classification of single-trial EEG
in a finger movement task. IEEE transactions on bio-
medical engineering, 54(5):821–31.
Lotte, F. and Guan, C. (2010). Spatially Regularized Com-
mon Spatial Patterns for EEG Classification. In 2010
20th International Conference on Pattern Recognition
(ICPR), pages 3712–3715.
Mika, S. (2003). Kernel Fisher Discriminants. PhD thesis,
Technische Universit
¨
at Berlin.
Mika, S., R
¨
atsch, G., and M
¨
uller, K.-R. (2001). A mathe-
matical programming approach to the kernel fisher al-
gorithm. Advances in Neural Information Processing
Systems 13 (NIPS 2000), pages 591–597.
Rao, Y. and Principe, J. (2001). An RLS type algorithm for
generalized eigendecomposition. In Neural Networks
for Signal Processing XI: Proceedings of the 2001
IEEE Signal Processing Society Workshop (IEEE Cat.
No.01TH8584), pages 263–272. IEEE.
Rivet, B., Souloumiac, A., Attina, V., and Gibert, G.
(2009). xDAWN Algorithm to Enhance Evoked
Potentials: Application to Brain-Computer Inter-
face. IEEE Transactions on Biomedical Engineering,
56(8):2035–2043.
Samek, W., Vidaurre, C., M
¨
uller, K.-R., and Kawanabe, M.
(2012). Stationary common spatial patterns for brain-
computer interfacing. Journal of neural engineering,
9(2):026013.
van Erp, J., Lotte, F., and Tangermann, M. (2012). Brain-
Computer Interfaces: Beyond Medical Applications.
Computer, 45(4):26–34.
W
¨
ohrle, H., Krell, M. M., Straube, S., Kim, S. K., Kirchner,
E. A., and Kirchner, F. (2015). An Adaptive Spatial
Filter for User-Independent Single Trial Detection of
Event-Related Potentials. IEEE transactions on bio-
medical engineering, PP(99):1.
W
¨
ohrle, H., Teiwes, J., Krell, M. M., Kirchner, E. A., and
Kirchner, F. (2013). A Dataflow-based Mobile Brain
Reading System on Chip with Supervised Online Cal-
ibration - For Usage without Acquisition of Training
Data. In Proceedings of the International Congress on
Neurotechnology, Electronics and Informatics, pages
46–53, Vilamoura, Portugal. SciTePress.
Zander, T. O. and Kothe, C. (2011). Towards passive brain-
computer interfaces: applying brain-computer inter-
face technology to human-machine systems in gen-
eral. Journal of Neural Engineering, 8(2):025005.
raxDAWN: Circumventing Overfitting of the Adaptive xDAWN
75
