
The Study on Co-calibration Mechanism on Static-movable Camera
Survilllance System
Zhiguo Yan, Yongjie Shi and Hao Ge
The Third Research Institute of Ministry of Public Security, Shanghai, China
yan8375@163.com
Keywords: Pedestrian Detection, Co-calibration, Video Surveillance, SIFT, Face Recognition.
Abstract: Currently, how to automatically realize acquisition, refining and fast retrieval of the target information in
surveillance video has become an urgent demand in public security visual surveillance field. This paper
proposes a new gun-dome camera cooperative system which solves the above problem partly. In the dual-
camera cooperative video-monitoring system, the co-calibration between the master and slave camera is the
key technique. We introduce one kind of automatic co-calibration method in this paper. The experimental
results show the effectiveness and efficiency of this calibration mechanism.
1 INTRODUCTION
In this paper, we propose a new gun-dome camera
cooperative system which adopts master-slave static
panorama-variable view dual cameras cooperative
video-monitoring system. Compared with the above
solutions, it has the following advantages
(Felzenszwalb, 2008):
1) Combining the advantages of the static-
panorama camera and the camera with variable field
of view (FOV), we can get the close shot of specific
objects in the long shot. Meanwhile, we can also
keep the attention to others objects in the distant
scenery. By using this mechanism, we can expand
the breadth and depth of video surveillance system.
FOV of panorama camera is large, and distant scene
can be observed via focusing the moving camera.
Complementary advantages could be obtained by
combining these two cameras. 2) Realize
observation of multiple targets. If only the moving
camera is used for observation of a target, the FOV
of the camera becomes small. When other targets
appear in the FOV, they could not be observed from
the FOV. 3) Facilitate the detection of the target.
Moving target detection method can be used to
detect the target, since the wide angle camera is
static. And if the target motion is not so rapid in the
FOV of the panorama camera, it is easy to trace.
As the object detecion and tracing is concerned ,
the premise lies in the co-calibration mechnisim on
the dual-camera survillance system. In the following
paragraphs, we will discuss it in detail.
2 THE DUAL-CAMERA
CONFIGURATION
Gun-dome camera cooperative system is one kind of
dual-camera monitoring system. There are one wide
angle camera and one Pan Tilt Zoom (PTZ) dome
machine. The wide angle camera is responsible for
the target detection in wide field of view, and PTZ
dome machine (also known as active camera) for
focusing and amplifying and tracking continuously
for the target of attention. Dual-camera cooperative
system function mainly is composed of three parts:
moving object detection in the wide-angle camera,
calibration of the moving camera and the wide-angle
camera, coordinated control of these two cameras.
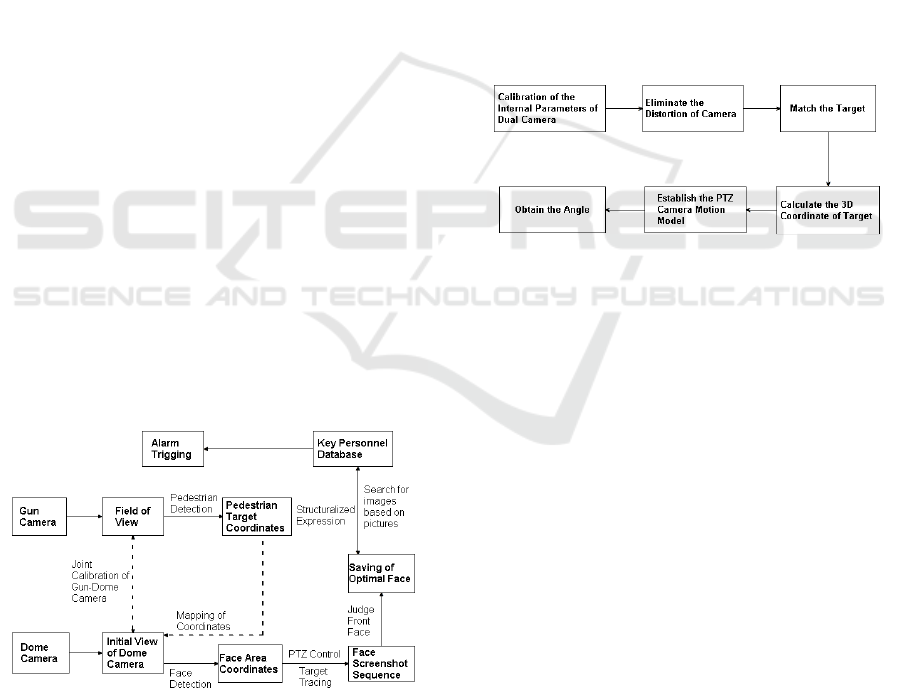
The proposed gun-dome camera cooperative system
is shown in figure 1. It is key personnel target
detection and recognition application platform
architecture based on gun-dome camera. In figure 1,
there is an overlapping region between the scene
recorded by the gun camera and the scene recorded
by the dome camera, which belonging to the joint
calibration of overlapping scenarios. When
146
146
Shi Y., Yan Z. and Ge H.
The Study on Co-calibration Mechanism on Static-movable Camera Survilllance System.
DOI: 10.5220/0006020801460149
In Proceedings of the Information Science and Management Engineering III (ISME 2015), pages 146-149
ISBN: 978-989-758-163-2
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
calibrating, dome camera is in the wide-angle state,
and under this situation, the gun-dome machine has
an overlapping region. The calibration objects
should be placed in the overlapping region in the
joint calibration. The gun camera is responsible for
panoramic monitoring with a wide-angle shot.
Moving target detection is focused on and target
position information is transmitted to the dome
camera under the panoramic field. Meanwhile, in the
scene of dome camera, according to the position
mapping relationship obtained from the gun-dome
camera cooperative calibration, we first transform
the position of the moving target in the gun camera,
and calculate the corresponding coordinate in initial
scene of the dome camera, then we start real-time
PTZ control and realize continuous tracing and
facial image capture of the target of attention.
To realize dual-camera cooperative system need:
Observe and detect targets in the scene with static
wide-angle camera; obtain the position of target and
transmit the position information to the moving
camera; moving camera tracing the target according
to its position and amplify it. The key techniques in
this process is 1) target detection. Wide angle
camera which is static relative to the scene, can
realize pedestrian objective location by motion
detection. Moreover, illumination, swing of
branches and any other factors should be taken into
consideration in actual scene. 2) Calibration of dual
cameras (Cho, 2012). The calibration of gun-dome
camera is to compute the angle which the moving
camera rotates to aim at position of the target in the
static camera. 3) Cooperative control of dual
cameras. According to the state of the target in the
static camera, appropriate cooperative strategy is set
up and the clear image of the target is acquired.
Figure 1: Block diagram of master-slave camera
cooperative system.
As to the dual-camera co-calibration, we should
satisfy the premise that the two camera have the
common vision at the initial stage. After the
execution of the co-calibration, the motion of slave
camera is controlled by the master camera.
3 METHODOLOGY
The calibration of dual cameras is a process of
computing parameters of geometric model of camera
imaging. The calibration methods mainly include
physical model method, look-up table method and
etc (Beriault, 2008; Luo, 2011; Xu, 2015). The
Physical model method calculates the rotation angle
based upon the imaging physical model of the target
in the dual cameras and motion model of cameras.
However, it can only obtain a very accurate rotation
angle theoretically and the practical operation is
much complicated. Compared with physical model
method, Look-up table method is much convenient,
simpler and reliable. In practice, the original
calibration data is still valid when the scene changes
from the learning environment to another.
Figure 2: Process of dual camera calibration.
In the gun-dome cooperative linkage personnel
detection and tracking system, the gun camera has to
transmit the position of pedestrian detected by itself
to the initial scene of dome camera, and then based
on this the dome camera begins to do face detection
and continuous tracking. The realization of the
above functions requires of the mapping relationship
between gun camera and dome camera (Li, 2006).
Namely the imaging position of the object in the gun
camera is mapped into the dome camera, and the
dome camera adjusts the rotation angle in order to
make the object in the centre of image of the dome
camera. Establishing this mapping relation is
implemented through dual camera calibration (Hao,
2010). The calibration of dual camera is referred to
as : under the knowledge of the position of target in
wide angle camera, to find the horizontal rotated
angle
α
and the vertical rotated angle
β
, which
make the PTZ camera rotate to aim at target,
[ ( , )] ( , )
L M u v
α β
→
.
The process can be elaborated with figure 2. First
of all calibrate the internal parameters of cameras;
The Study on Co-calibration Mechanism on Static-movable Camera Survilllance System
147
The Study on Co-calibration Mechanism on Static-movable Camera Survilllance System
147
Secondly eliminate the distortion of lens of cameras;
Then match the image target in dual camera via the
polar constraint conditions and image features;
Calculate the 3D coordinates of the target under PTZ
camera coordinate system; Finally compute the
rotated angle (
α
,
β
) according to PTZ camera
motion model.
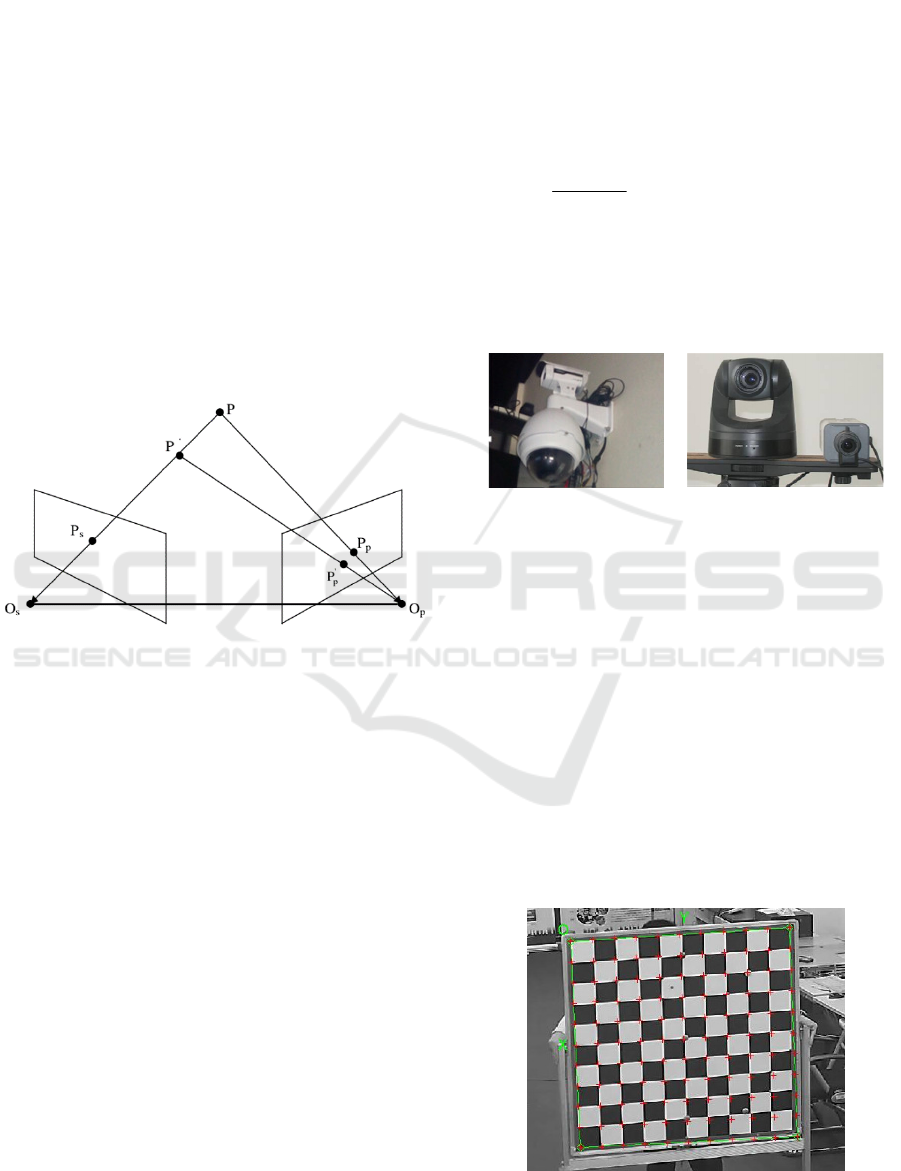
The imaging model of dual cameras is as shown
in Fig. 3. Through the analysis of the physical
process of the dual cameras calibration, there exist a
single mapping
[ y z] ( , )
T
x
α β
⇔
between the
current position of the object
[ , , ]
T
x y z
and absolute
position parameter
( , )
α β
of camera when it is in
the centre of the field of view of image. Thus, if the
relationships between the three dimensional
coordinate of the object
[ , , ]
T
x y z
and the position
of the camera
( , )
α β
is set up, the calibration of
dual cameras will be realized.
Figure 3: Dual cameras imaging.
The look-up table can be constructed by
supervised learning, in order to acquire the angle
which PTZ camera rotates to aim at the target, and
realize the dual cameras calibration. Detailed steps
are as follows.
1) Choose Region of Interest (ROI) which
needs PTZ camera’s key monitoring in visual
surveillance area of the wide angle camera.
2) Divide ROI of wide angle image into grids
according to appropriate spacing. Then acquire
the pixel coordinates in the grid intersections.
11 1 1 12 1 2 21 2 1 22 2 2
( , ), ( , ), ( , ), ( , ),...,
M x y M x y M x y M x y
3) Adjust the rotation of PTZ camera until the
centre of PTZ camera image coincides with M11.
Then read the current rotation angles in the
horizontal direction and the vertical direction of
PTZ camera
11
( , )
α β
, and record a group of
data
11 1 1 11
[ ( , )] ( , )
L M x y
α β
=
.
4) Repeat the 3) operation for the rest
intersections in ROI of wide angle image and
take notes down all
[ ( , )] ( , )
L M x y
α β
=
.
5) Look for the minimum rectangle
M
11
M
12
M
21
M
22
encircling non-grid-intersection
S(x, y) in ROI, and calculate the rotation angle of
PTZ camera by means of bilinear interpolation
formula.
11 2 2 12 2 1
2 1 2 1
21 1 2 22 1 1
1
( , ) [ ( )( )( ) ( )( )( )
( )( )
( )( )( ) ( )( )( )]
s
L M x x y y L M x x y y
x x y y
L M x x y y L M x x y y
α β
= − − + − − +
− −
− − + − −
(1)
6) Combining data obtained in 3), 4), 5) gives
the look-up table for the PTZ camera rotating
and aiming at arbitrary position of ROI in dome
camera view.
Figure 4: Dual cameras on the same vertical plane.
When calibrating dual cameras in the way of
Look-up Table (Kim, 2009) it is easy to operate with
depth information of the object with regard to the
two cameras changing a little. Therefore, the
installation
positions of the two
camera
s are as
shown in Fig.4 that the lens of each camera
approximat
e
ly
stay on the same vertical plane.
4 EXPERIMENT
As a comparison, we first execute the calibration
using the classic chess-board method, which
depends on the reference object and is relevant to the
spot circumstance, see Fig. 5.
Figure 5(a): The chessboard for calibration.
ISME 2015 - Information Science and Management Engineering III
148
ISME 2015 - International Conference on Information System and Management Engineering
148
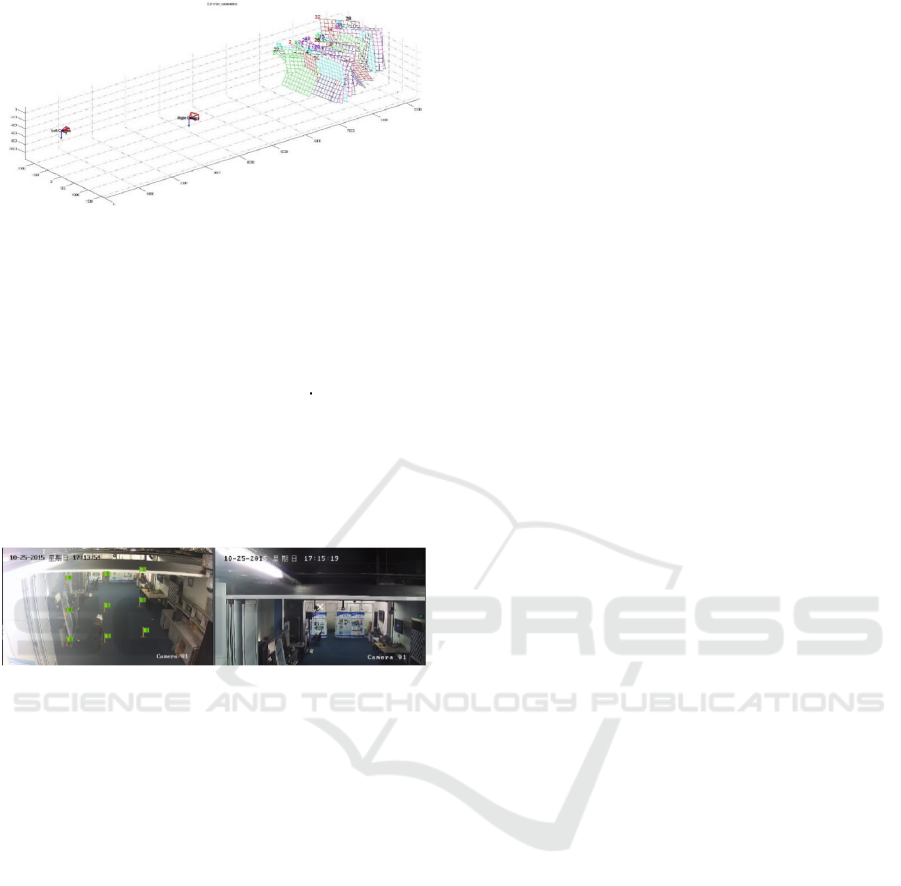
Figure 5(b): The correlation between camera coordinate
and the chessboard coordinate.
As to the above-mentioned cooperative calibration,
we adopted the calibration toolbox on Matlab
platform (Xie, 2012). The classical chessboard is
utilized to get the internal parameter matrixes of the
two component cameras, see Fig. 5(a) The external
matrixes and the rotation and translation relation
between the two cameras is calculated using the 3D
calibration methodology, see Fig. 5(b).
Now, we execute the proposed automatic co-
calibration method, see the Fig. 6.
Figure 6: The interface of the automatic co-calibration
procedure.
In Fig.6, the left image is the scene of master
camera and the right is the slave camera. The green
points painted in the left images is the pre-set
calibration points. These nine points split the whole
into four sections. Those points lie in the four
sections are calibrated by the interpolated methods.
By this mechanism, the procedure can
automatically deal the co-calibration job between the
two cameras. The experiments shows its
effectiveness and efficiency.
ACKNOWLEDGEMENTS
Our research was supported by the Project of
Shanghai Municipal Commission Of Economy and
Information (No.12GA-19), the standard revision
project on public security named “Technical
requirements for interested object detection and
tracing using the collaborative multicamera in
surveillance video system” (No. C14726).
REFERENCES
Felzenszwalb, P., D. McAllester, and D. Ramanan, A
Discriminatively Trained, Multiscale, Deformable
Part Model, in Computer Vision and Pattern
Recognition2008, IEEE: Anchorage, AK p. 1 - 8
Cho, H., et al., Real-time Pedestrian Detection with
Deformable Part Models, in Intelligent Vehicles
Symposium2012 IEEE: Alcalá de Henares, Spain. p.
1035-1042.
Beriault, S., Multi-Camera System Design, Calibration
and 3D Reconstruction for Markerless MotionCapture,
in School of Information Technology and Engineering
2008, Engineering University of Ottawa. p. 146.
Luo, X., Xu, Z., Yu, J., and Chen, X. 2011. Building
Association Link Network for Semantic Link on Web
Resources. IEEE transactions on automation science
and engineering, 8(3):482-494.
Xu, Z. et al. 2015. Knowle: a Semantic Link Network
based System for Organizing Large Scale Online
News Events. Future Generation Computer Systems,
43-44:40-50.
Wang, Y., Distributed Multi-Object Tracking with Multi-
Camera Systems Composed of Overlapping and Non-
Overlapping Cameras, in Graduate College2013,
University of Nebraska p. 183.
Hao, Z., X. Zhang, and P. Yu, Video Object Tracing
Based on Particle Filter with Ant Colony Optimization,
in The 2nd IEEE International Conference on
Advanced Computer Control2010: Shenyang, China. p.
232-236.
Kim, J.-M., K.-H. Kim, and M.-K. Song, Real Time Face
Detection and Recognition Using Rectangular Feature
Based Classifier and Modified Matching Algorithm in
2009 Fifth International Conference on Natural
Computation2009: Korea. p. 171-175.
Xie, D., L. Dang, and R. Tong, Video Based Head
Detection and Tracking Surveillance System, in
International Conference on Fuzzy Systems and
Knowledge Discovery (FSKD)2012 IEEE: Sichuan p.
2832 - 2836.
The Study on Co-calibration Mechanism on Static-movable Camera Survilllance System
149
The Study on Co-calibration Mechanism on Static-movable Camera Survilllance System
149
