
Double Ant Colony System to Improve Accessibility after a Disaster
V
´
ıctor Sacrist
´
an, Antonio Jim
´
enez-Mart
´
ın and Alfonso Mateos
Departamento de Inteligencia Artificial, Universidad Polit
´
ecnica de Madrid,
Campus de Montegancedo S/N, Boadilla del Monte, Spain
Keywords:
Accessibility Problem, Road Repair, Ant Colony System.
Abstract:
We propose a novel double ant colony system to deal with accessibility issues after a natural or man-made
disaster. The aim is to maximize the number of survivors that reach the nearest regional center (center of
economic and social activity in the region) in a minimum time by planning which rural roads damaged by
the disaster should be repaired given the available financial and human resources. The proposed algorithm is
illustrated by means of a large instance based on the Haiti natural disasters in August-September 2008.
1 INTRODUCTION
Natural disasters have a huge impact on human life, as
well as on the economy and the environment. In spite
of the advances in forecasting and monitoring the nat-
ural hazards that cause disasters, their consequences
are often devastating.
Disaster management activities can be categorized
into five generic phases: prediction, warning, emer-
gency relief, rehabilitation and reconstruction. The
last three phases are generally associated with the
post-disaster effort and involve both response and re-
covery activities (Moe and Pathranarakul, 2006). The
response activities during the emergency relief phase
aim to provide assistance during or immediately af-
ter a disaster to ensure the preservation of life and the
basic subsistence needs of the victims.
Activities during the rehabilitation and recon-
struction phases include decisions and actions taken
after a disaster in order to restore or improve the liv-
ing conditions of the affected community, but also ac-
tivities related to mitigation and preparedness.
One of the main problems relief teams face af-
ter a natural or man-made disaster is how to plan ru-
ral road repair work to take maximum advantage of
the limited available financial and human resources.
In this paper we account for the accessibility issue,
which is defined in (Donnges, 2003) as the degree
of difficulty people or communities have in access-
ing locations for satisfying their basic social and eco-
nomic needs. It is defined in (Lebo and Schelling,
2001) as the minimum level of rural transport infras-
tructure network service required to sustain socioeco-
nomic activity. Specifically, we maximize the num-
ber of survivors that reach the nearest regional center
(center of economic and social activity in the region)
in a minimum time by planning which rural roads
should be repaired given the available financial and
human resources.
This is a combinatorial problem since the num-
ber of connections between cities and regional centers
grows exponentially with the problem size, and exact
methods are no good for achieving an optimum solu-
tion. In order to solve the problem we propose a novel
adaptation of the ant colony system (ACS), the double
ant colony system (DACS). In the DACS we consider
pairs formed by an explorer and a worker ant. The
aim of the explorer ant is to build paths from cities
to their nearest regional centers, whereas the goal of
the worker ant is to identify the optimal repair plan to
maximize net accessibility.
The two ants always work concurrently in pairs
to build the paths and repair roads simultaneously.
Candidate roads for repair have to be previously se-
lected by the explorer ant in a transition rule, whereas
the possibility of repairing a damaged road has to be
taken into account when deciding which node to visit
next.
In Section 2, we introduce the mathematical
model of the accessibility problem. A literature re-
view focused on accessibility problems and their so-
lution on the basis of metaheuristics is provided in
Section 3. In Section 4, we describe the double ant
colony system. An example based on the Haiti natural
disasters in 2008 illustrates the DACS in Section 5.
Finally, some conclusions are provided in Section 6.
Sacristán, V., Jiménez-Martín, A. and Mateos, A.
Double Ant Colony System to Improve Accessibility after a Disaster.
DOI: 10.5220/0005651900790086
In Proceedings of 5th the International Conference on Operations Research and Enterprise Systems (ICORES 2016), pages 79-86
ISBN: 978-989-758-171-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
79

2 PROBLEM MODELLING
Let G = (N,ε) be an undirected graph where N =
{N
1
∪ N
2
∪ N
3
} is a node set and ε is an edge set.
N is partitioned into three subsets: N
1
, regional cen-
ters; N
2
, rural towns; and N
3
, road intersection points.
Edges in ε represent roads with an associated binary
level l
e
(1 if the road is operational and 0 otherwise).
The subset of roads ε
r
∈ ε is composed of roads
that are not operational and can be repaired. The ini-
tial level for these roads is l
e
= 0. There is a finan-
cial budget B and a person-hour budget H allocated
to road repair, whereas a financial cost c
e
and a man-
power requirement m
e
are associated with each road
e ∈ ε
r
.
A measure of accessibility is defined for each node
i ∈ N
2
: the shortest travel time from i to the closest
regional center in N
1
, which depends on which roads
are singled out for repair. The time to traverse an edge
is t
e
when the road is operational and t
e
+ M
e
when it
is not. M
e
represents a penalty factor for using an-
other means to traverse e (e.g., using animal-powered
transport).
Three types of decision variables have to be con-
sidered in this accessibility problem. First, the binary
variables x
e
indicate whether (x
e
= 1) or not (x
e
= 0)
road e ∈ ε
r
is repaired. Variable y
i j
e
is assigned the
value 1 when road e is used on the path from i ∈ N
2
to j ∈ N
1
and 0 otherwise. Similarly, variable b
i j
k
is
given the value 1 when node k is visited on the path
from i ∈ N
2
to j ∈ N
1
.
A mathematical integer program for this acces-
sibility problem (Campbell et al., 2006; Maya and
S
¨
orensen, 2011) is described below.
The objective function minimizes the weighted
sum of the shortest routes for all i ∈ N
2
to the near-
est regional center j ∈ N
1
as follows:
f (x) = min
∑
i∈N
2
(w
i
× min
j∈N
1
{
∑
e∈ε
d
e
y
i j
e
}) (1)
where
d
e
=
t
e
+ (1 − x
e
)M
e
, ∀e ∈ ε
r
t
e
, ∀e ∈ ε \ ε
r
. (2)
The weight w
i
associated with each node i ∈ N
2
represents its relative importance and is usually a
function of the number of inhabitants of the rural town
associated with that node.
The constraints to be considered in the optimiza-
tion problem are as follows. First, the following con-
straints ensure, respectively, that there is exactly one
road leaving i on the path from i to j and that there is
exactly one road entering j on the path from i to j:
∑
e∈ε(i)
y
i j
e
= 1,
∑
e∈ε( j)
y
i j
e
= 1 ∀i ∈ N
2
,∀ j ∈ N
1
, (3)
where ε(i) is the set of roads adjacent to node i.
We must also ensure that the path from i to j is
connected:
∑
e∈ε(k)
y
i j
e
= 2b
i j
k
∀k ∈ N \ {i, j},∀i ∈ N
2
,∀ j ∈ N
1
.
(4)
Additionally, budget limitations regarding road re-
pair also have to be taken into account:
∑
e∈ε
r
c
e
x
e
≤ B,
∑
e∈ε
r
m
e
x
e
≤ H, (5)
where B and H are the above financial and the person-
hour budgets, respectively.
3 LITERATURE REVIEW
The reconstruction or repair of the road network after
a natural disaster has been studied by several authors
considering different objectives and using diverse ap-
proaches.
(Sato and Ichii, 1996) developed a hybrid genetic
algorithm (GA) to decide the priority of components
to be restored in a restoration process of lifelines dam-
aged by earthquakes. They also applied a single pop-
ulated GA to distribute restoration teams at damaged
sites in order to optimize the restoration process of
lifeline networks.
A GA was also proposed in (Chen and Tzeng,
1999) to solve a fuzzy multi-objective model for re-
constructing the post-quake road network, aimed at
minimizing the total travel time over the road net-
work during reconstruction, the individual reconstruc-
tion time of any work team, and the idle time between
work teams.
(Feng and Wang, 2003) proposed a multi-
objective model focused on network repair over the
first 72 hours after the disaster to maximize the perfor-
mance of emergency road rehabilitation and the num-
ber of people that benefit, and to minimize the risk
to rescuers. A case study was conducted presenting
the 1999 Chi-Chi earthquake in Taiwan. (Lee, 2003)
also deals with repairing the post earthquake road net-
works. A GA was used to solve a scheduling prob-
lem. Specifically, the sequence for repairing disas-
ter spots in a first model was determined on the basis
of a fuzzy ranking method, whereas a second model
assumed that the travel times are deterministic and al-
lowed each disaster spot to be handled by one or more
construction teams.
In (Liao, 2005) the damaged infrastructure repair
problem considered both the overall efficiency and
total completion time. An upper-level subproblem
maximizes the overall efficiency of the repair work,
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
80

whereas the lower-level subproblem minimizes the to-
tal completion time subject to the time constraint for
each disaster spot.
(Wang, 2008) formulated a series of mixed inte-
ger programming problems for a multi-depot vehicle-
routing problem with time windows. A two-stage
solution algorithm was proposed, using the near-
est/farthest insertion method for generating an initial
solution, and the 2-opt, swap, and or-opt methods for
improving that solution, respectively.
(Yan and Shih, 2009) considered minimizing the
length of time required for both emergency road-
way repair and relief distribution, as well as the
related operating constraints, to develop a model
for planning emergency repair and relief distribu-
tion routes and schedules within a limited time.
A multi-objective mixed-integer multiple-commodity
network flow model was proposed which was effi-
ciently solved by a weighting method based heuristic.
(Chen et al., 2011) addressed the task of repair-
ing damaged infrastructures as a series of multi-depot
vehicle-routing problems with time windows in a
time-rolling frame by a take-and-conquer strategy.
In (Maya and S
¨
orensen, 2011) the greedy random-
ized adaptive search procedure (GRASP) in combina-
tion with variable neighborhood search (VNS) was
used to solve exactly the same accessibility problem
considered in this paper. We will use the same in-
stance to illustrate our proposal and analyze its per-
formance in Section 5.
(Zhang and Lu, 2011) established a fuzzy multi-
objective model for road rush-repair scheduling. The
model based on VRP, containing time window, took
the sum time of the repair work, the time of the work
group in transit and the risk of the rush-repair. A GA
was developed to solve the problem.
(Yan and Shih, 2012) employed an ACS algorithm
coupled with a threshold accepting technique (ACSB)
for solving and applying an emergency roadway re-
pair time-space network flow problem to different in-
stances using data from the Chi-Chi earthquake.The
objective was formulated as a minimax function to
minimize the time duration for finishing all repair
work.
More recently, (Mu
˜
noz et al., 2015) used an adap-
tation of the ACS to solve exactly the same accessi-
bility problem considered in this paper. In the ACS
adaptation the construction of paths from each city to
its nearest regional center and the road repair deci-
sions were carried out independently.
Finally, (Zheng et al., 2015) survey the research
advances in evolutionary algorithms and other meta-
heuristics applied to disaster relief operations.
4 DOUBLE ANT COLONY
SYSTEM
The double ant colony system (DACS) is bio-inspired
in Atta ant colonies from Costa Rica, commonly
known as leaf-cutter ants. These ants work in pairs.
While one ant carries a leaf, a smaller one climbs on
the back of the leaf to inspect its quality and protect
the carrier ant from a type of parasitic fly.
In DACS we consider pairs formed by an explorer
and a worker ant. The aim of the explorer ant is to
build paths from cities to their nearest regional cen-
ters, whereas the goal of the worker ant is to identify
the optimal repair plan that maximizes net accessibil-
ity.
The two ants always work concurrently in pairs
to build the paths and repair roads simultaneously.
Candidate roads for repair have to be previously se-
lected by the explorer ant in a transition rule, whereas
the possibility of repairing a damaged road has to be
taken into account when deciding which node to visit
next.
However, although the explorer and worker ants
work simultaneously, they each use different infor-
mation to select the next node to be visited and to
decide whether or not a road is repaired. Thus, dif-
ferent pheromone matrices will be considered for the
explorer and worker ants.
Moreover, we also consider that the construction
of paths from each city to its nearest regional center
as independent problems. Whereas it could be a good
decision to use a specific road to build a path from
city i to its nearest regional center, this could be a
bad decision if another city j is considered. Thus,
we propose using different pheromone matrices for
the construction of paths from each city to its nearest
regional center.
Note that if only one pheromone matrix is used
then the pheromone level for a road might be very
high because this road is in the path from a city to its
nearest regional center and, consequently, is visited
by many ants when building this road. However, this
road might not originally be in the path from another
different city to its nearest regional center, but could
be included due to its high pheromone level.
Besides, as the available budgets concern the re-
pair process for the whole accessibility problem, in-
volving n cities, only one pheromone matrix will be
used by worker ants.
Thus, in an accessibility problem with n cities,
n + 1 pheromone matrices would be used, n by the
explorer ants and 1 by the worker ants.
The basic idea of DACS (Sacrist
´
an, 2015), see
Algorithm 1, is as follows. First, both explorer and
Double Ant Colony System to Improve Accessibility after a Disaster
81

worker pheromone matrices are initialized. Then, we
consider m pairs of ants in each iteration, formed by
an explorer and a worker ant. For each pair of ants,
k, we first initialize the respective available budgets
B
k
= B and H
k
= H. Then, the pair of ants builds a
path for each city n in N
2
to its nearest regional center
and simultaneously decides on the repair of the re-
spective roads. Note that some decisions to repair are
taken during the construction of such paths, but we
will not have a complete repair plan until all n cities
have been analyzed.
Algorithm 1: Double ant colony system (DACS).
Initialization: τ
expl
0
, τ
worker
0
, T .
repeat
for (each pair of ants k, k = 1,...,m) do
Initialize budgets B
k
= B and H
k
= H
for (n ∈ N
2
cities (randomly selected)) do
repeat
Ant k
expl
performs transition rule
if (the road is damaged) then
Ant k
worker
decision to repair
Update B
k
and H
k
if necessary
end if
Local pheromone trail update
until a path is build for city n
end for
end for
Identify IterationSol (best accessibility value)
if IterationSol better than best-so- f ar then
Update best-so- f ar
end if
Global pheromone trail update
until maximum number of iterations
The order in which cities in N
2
are analyzed by the
m pairs of ants in each iteration is selected at random.
The explorer ant (k
expl
) builds the path according
to a transition rule. Once a road is selected by the
explorer ant, the worker ant (k
worker
) comes into play
and decides whether or not to repair that road, if pos-
sible, i.e. if the road is damaged and the person-hour
and financial budget available at the time is sufficient.
If the road is singled out for repair, the remaining bud-
gets (B
k
and H
k
) are updated. The new available bud-
gets together with the roads repaired have to be taken
into account when building paths for the remaining
cities in N
2
by the pair of ants.
Local pheromone trails are updated by both ex-
plorer and worker ants in the corresponding matrices
while paths are built.
Once the pair of ants has analyzed the n cities we
have a possible solution, consisting of the paths from
each city n in N
2
to its nearest regional center and
a repair plan. Note that the accessibility value of a
solution implies recomputing the accessibility of each
path built taking into account all the roads repaired
in the repair plan. Even if a road included in a path
for a specific city is not repaired, it may be decided
to repair the road if it is considered again during the
analysis of another city and included in the path from
that city.
Of the m solutions derived from the m pairs of
ants, the one with the highest net accessibility value is
the solution for the current iteration (IterarionSol). If
the solution of the current iteration is better than the
global solution (best-so- f ar) in terms of net accessi-
bility, then the global solution is updated.
Finally, global pheromone trails are updated,
where only the pair of ants corresponding to the
best-so-far solution deposit pheromes. The explorer
ant updates the corresponding explorer pheromone
matrices taking into account the paths in the best-
so-far solution, whereas the worker ant updates the
worker pheromone matrix taking into account the cor-
responding repair plan.
We now describe the algorithm phases in detail.
4.1 Initizalization Phase
First, a matrix T containing the minimum distance be-
tween each pair of nodes in the net is computed using
the Floyd-Warshall algorithm (Cormen et al., 1990).
Pheromone levels are then initialized in the matri-
ces corresponding to explorer ants as follows:
τ
expl
0
= 1/m × L
n
, (6)
where m is the number of ants and L
n
is the length of
the path from city n to its nearest regional center in T
and assuming that no road has been repaired.
A similar expression to (8) is used to compute
the initial pheromone in the matrix corresponding to
worker ants. However, the elements to be considered
account for accessibility rather distance issues, i.e.
τ
worker
0
=
1
m×A
, where A is the accessibility value cor-
responding to a suboptimal solution computed using a
sequential forward selection (SFS) algorithm that we
propose.
SFS is very similar to the insertion algorithm (IA)
proposed in (Maya and S
¨
orensen, 2011). In the IA,
see Algorithm 2, matrix T containing the minimum
distance between each pair of nodes in the net and
matrix P including the paths associated with the min-
imum distances in T are first computed using the
Floyd-Warshall algorithm.
Then, roads whose repair leads to a greater im-
provement in net accessibility are iteratively repaired
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
82

until the budget is depleted. The time saved by repair-
ing a given road is computed according to the follow-
ing expression:
saving(e) =
∑
l∈N
2
min
k∈N
1
{T [k,l]}−
min
k∈N
1
{T [k,i] + f
t
(e,1) + T [ j,l]}
,
(7)
where T [i, j] represents the shortest travel time from i
to j and f
t
(e,1) gives the time to traverse edge e when
the road is repaired.
Algorithm 2: Insertion algorithm (IA).
Require: Consider initial x, B, H, T, P, saving = 0
repeat
for (e ∈ ε
r
| l
e
= 1, c
e
≤ B, m
e
≤ H) do
Estimate insertion saving for e, saving(e)
if saving(e) > saving then
saving = saving(e), candidate = e
end if
end for
Improve candidate: Update x, B, H, T and P
saving = 0
until no insertion candidate is found
The difference between IA and the SFS algorithm
that we propose is that the SFS algorithm recomputes
the saving for all the unrepaired roads in each itera-
tion, since these values depend on the state of the net.
So, when a road is repaired in an iteration, the net has
changed and the saving corresponding to the roads
that are still unrepaired may have changed too. Re-
computing the saving values throughout the iterations
in the IA algorithm outputs a more accurate solution.
Another difference between IA and the SFS algo-
rithm is that the expression proposed by Maya and
Sorensen for the saving may include negative ele-
ments in the summation. However, we think that not
repairing a road would never mean a loss in the net ac-
cessibility or lead to longer path between a city and its
nearest regional center. Therefore, we consider only
the positive elements in the summation.
4.2 Path Construction and Repair
Decisions
As already mentioned, the aim of explorer ants is
to build the paths from each city to its nearest re-
gional center. To do this, we use the pseudorandom
proportional rule used in the original ACS algorithm
(Dorigo and Gambardela, 1997a; Dorigo and Gam-
bardela, 1997b) to decide which node to visit next
when building the paths. An ant currently at node i
chooses the road
e =
argmax
e∈ε(i)
{[τ
expl
e
],[η
expl
e
]
β
}, if q ≤ q
0
J, otherwise
,
(8)
where ε(i) is the set of roads adjacent to city i and
J is randomly generated according to the following
probabilities:
[τ
expl
e
] × [η
expl
e
]
β
∑
l∈ε(i)
[τ
expl
l
] × [η
expl
l
]
β
. (9)
q is randomly generated from a uniform distribu-
tion in [0, 1] and q
0
(0 ≤ q
0
≤ 1) is a parameter that
models the degree of exploration and the possibility
of concentrating the search around the best-so-far so-
lution or exploring other paths. It is usually initialized
with a high value (0.8 ≤ q
0
≤ 0.9).
Note that the higher parameter β is, the more
relevant the heuristic information regarding the
pheromone trails is. The heuristic information used
in the pseudorandom proportional rule, η
expl
e
, is the
inverse of the distance in time units to traverse the
corresponding road e when it is operational (t
e
). How-
ever, when the road is damaged the time to traverse it
is t
e
+M
e
. Therefore, we propose using a value within
the interval [t
e
,t
e
+M
e
] according to the probability of
that road being repaired. This is computed on the ba-
sis of the saving, see Eq. (10). Roads with a low sav-
ing (low probability of being repaired) with respect
to the other roads under consideration will be propor-
tionally assigned a value on the right of the interval,
whereas a high saving will mean that a value on the
left of the interval will be assigned.
Note that the pheromone level in the above ex-
pressions, τ
expl
e
, corresponds to an explorer ant and
depends on the city from which the path is being built
since we are considering different pheromone matri-
ces for the paths from each city to its nearest regional
center.
Besides, the aim of worker ants is to identify a
road repair plan that maximizes net accessibility. Al-
though the decision on whether or not to repair a road
is different to deciding which node to visit next when
building the paths, it has been modeled as a path se-
lection problem too. Specifically, a path will mean
repair whereas the other will mean do nothing.
Therefore, the pseudorandom proportional rule
used in the ACS algorithm can be reused as the repair
rule, but including pheromone values corresponding
to worker ants (τ
worker
e
rather than τ
expl
e
) and different
heuristic information (η
worker
e
rather than η
expl
e
).
Now, η
worker
e
is expressed in terms of accessibil-
ity rather than distance since the decision is aimed
Double Ant Colony System to Improve Accessibility after a Disaster
83

at maximizing net accessibility. Thus, η
worker
e
cor-
responding to the path in which the road is not re-
paired is the net accessibility when no road has been
repaired, otherwise (we decide to repair the road) the
net accessibility when that road is repaired is used.
This is computed using the saving expression.
4.3 Pheromone Update
Pheromone update works in a similar way to the
ACS algorithm. However, we must take into ac-
count that different pheromone matrices are being
used for explorer and worker ants. Moreover, dif-
ferent pheromone matrices are also being used in the
construction of the paths from each city to its nearest
regional center.
According to ACS, only the explorer ants corre-
sponding to the best-so-far solution add pheromone
in the global pheromone trail update after each itera-
tion as follows:
τ
expl
e
(t) = (1 − α)τ
expl
e
(t − 1) + α∆τ
expl
e
,
where 0 < α < 1 is the global pheromone evaporation
parameter and
∆τ
expl
e
=
1
C(S
expl
best−so− f ar
)
,
where C(S
expl
best−so− f ar
) is the length of the shortest path
found up to that point between the respective city and
its nearest regional center.
Regarding worker ants, the expression for
τ
worker
e
(t) is analogous, and C(S
worker
best−so− f ar
) now
refers to the net accessibility value associated with the
best-so-far solution.
The local pheromone trail update is applied by
ants immediately after having traveled a road during
the path construction and is aimed at allowing a more
diversified search since it improves the probability of
the pair of ants following different paths:
τ
e
(t) = (1 − ρ)τ
e
(t − 1) + ρ∆τ,
where ρ (0 < ρ < 1) is the local pheromone evap-
oration parameter and ∆τ is τ
expl
0
or τ
worker
0
(initial
pheromone levels) depending on whether the ant is
a worker or an explorer, respectively.
5 ILLUSTRATIVE EXAMPLE
We used the instance of the real natural disaster that
occurred in Haiti described in (Maya and S
¨
orensen,
2011) to illustrate the proposed DACS and check its
performance. Moreover, the problem-solving method
based on GRASP and VNS metaheuristics proposed
in (Maya and S
¨
orensen, 2011) was used for compari-
son.
Within weeks at the end of August and begin-
ning of September 2008, four hurricanes and tropical
storms hit Haiti. Up to 800,000 people were directly
affected and many main roads and bridges across the
country were destroyed or blocked, compounding lo-
gistics operations (OCHA-UN, 2008).
The considered instance is based on this case us-
ing the information gathered from diverse sources.
Data from GISDataDepot (http://data.geocomm.com)
was used to define the road network in a GIS,
whereas the status of the network after the natu-
ral disaster is based on the information published
by Mapaction (www.mapaction.org) and Reliefweb
(www.reliefweb.com), and demographic information
was obtained from Falling Rain Genomics Inc.
(www.fallingrain.com).
In this accessibility problem instance we have
three regional centers (Port Au-Prince, Les Cayes,
and Cap Haitien), 101 rural towns, 110 road junctions
and 281 roads (30 of which were damaged after the
disaster), see Fig 1. Solid and dashed lines represent
operational and damaged roads, respectively. More-
over, damaged roads are numbered.
The penalty factor for traversing a non-operational
road, M
e
, is the same for all e ∈ ε
r
, the sum of the
length of all the roads in ε
r
, 336.58. Table 1 shows
the financial cost (c
e
) and the manpower requirement
(m
e
) associated with the repair of each road e ∈ ε
r
.
Table 1: Financial cost (c
e
) and manpower requirement (m
e
)
for repairing roads.
road c
e
m
e
road c
e
m
e
road c
e
m
e
1 5.6 5 2 6.5 9.3 3 0.9 3.6
4 2.5 5.1 5 7.1 7.7 6 7.1 3.7
7 2.8 3.7 8 4 1 9 3.8 1.4
10 7 5.8 11 4.9 5.8 12 4.2 2.6
13 2.8 0.9 14 4 3.8 15 3.2 2.7
16 3.8 4.2 17 3.6 2.4 18 2.8 3.4
19 2.5 3.6 20 3 4.2 21 6.5 6.2
22 4.4 5.1 23 4.3 4.6 24 3.3 2.1
25 4.4 4.2 26 2.7 5.5 27 4.4 6.5
28 1.7 5.1 29 3.7 3.3 30 2.7 5.6
Following (Maya and S
¨
orensen, 2011) we have
considered three different scenarios in which 25%,
50% and 75% of the total monetary and person-hour
budgets required to repair all roads (B = 120, H =
128) are available, respectively.
The values fixed for parameters in the DACS al-
gorithm are as follows: the number of pairs of ants
used is m = 10 and the number of iterations is 100.
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
84
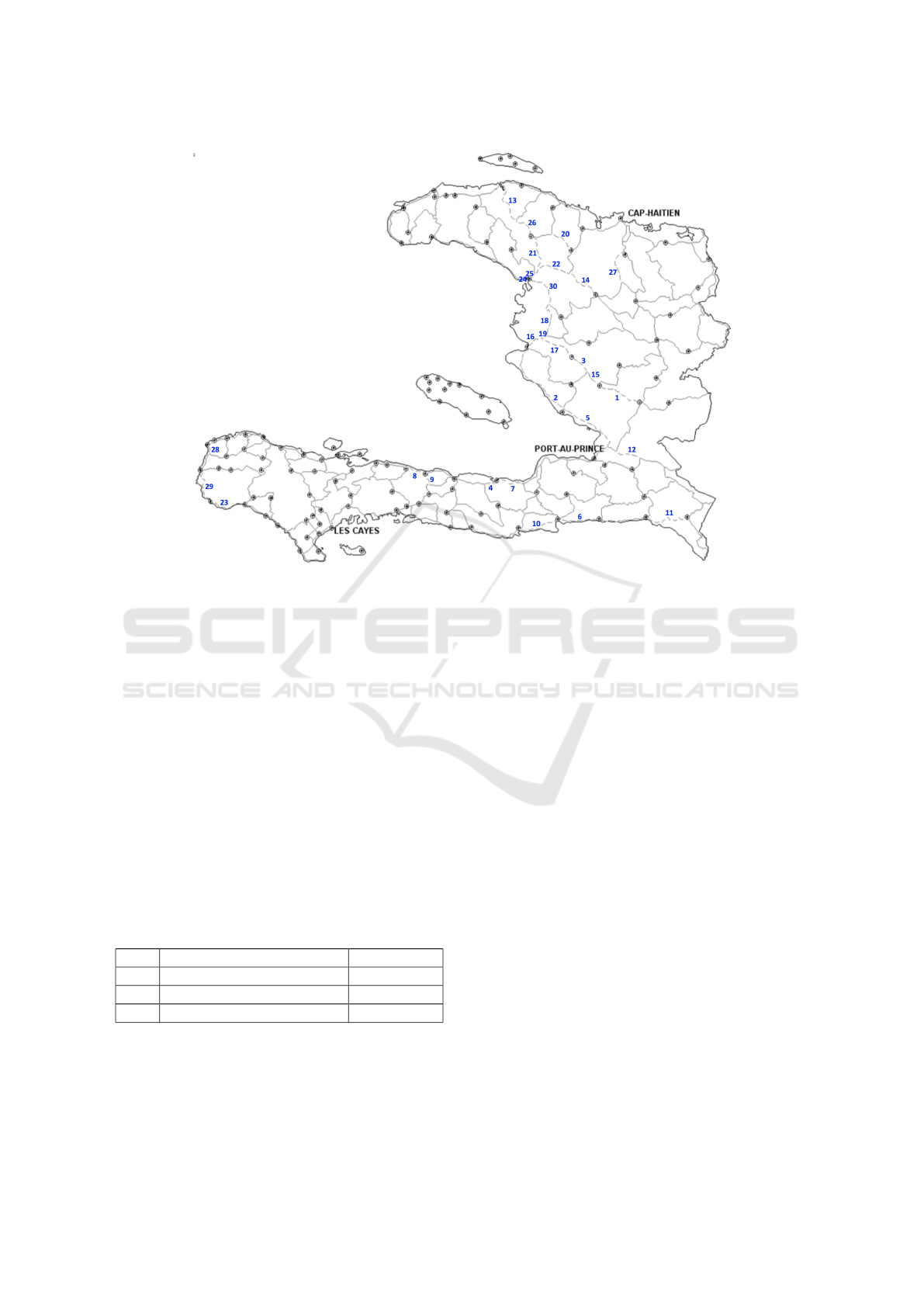
Figure 1: Road network after the natural disaster.
The initial pheromone level for worker ants depends
on the scenario under consideration since the sequen-
tial forward selection algorithm that we propose uses
the available budgets. Specifically, τ
worker
0
(25%) =
0.0077 and τ
worker
0
(50%) = τ
worker
0
(75%) = 0.00786.
Besides, 101 initial pheromone levels were com-
puted for explorer ants since 101 pheromone matrices
were considered for explorer ants. However, these ini-
tial pheromone levels for explorer ants are the same in
all three scenarios.
Local and global evaporation parameters are α =
ρ = 0.1. In the pseudorandom proportional rule for
path construction β = 2 and q
0
= 0.9.
Table 2 shows the repaired roads and the total tra-
verse time associated with the paths from the 101 ru-
ral towns to their closest regional center in the three
scenarios under consideration.
Table 2: Solutions for the three scenarios.
Repaired roads Traverse time
25% {23,5,3,22,25,7,24} 125,449,501.62
50% {5,24,20,25,22,3,27,7,23,1,2,9,11} 121,055,243.50
75% {25,22,23,24,5,27,11,1,7,29,3,2,20,29} 120,995,327.08
When the budgets are set to 25% of the total re-
quirements only seven out of the 30 damaged roads
are repaired (see Table 2). This recovers 58.1% of
the accessibility with respect to the conditions before
the disaster. If we consider 50% of the total require-
ments, then 13 out of the 30 damaged roads are re-
paired, recovering 96.8% of the accessibility. Finally,
with 75% of the total requirements, the network can
be totally recovered with respect to accessibility. To
do this, only 14 out of the 30 damaged roads have to
be repaired.
Regarding the affected towns and people, 774,432
persons (14.8% of the total population) were affected
by the natural disaster. Specifically, the shortest path
for 364,259 of them to their nearest regional center
was longer than before the disaster, whereas there was
no path connecting the other 410,173 persons to a re-
gional center.
In the three above scenarios we established a path
connecting all people to a regional center, and the per-
centage of people whose shortest path to their nearest
regional center is longer than before the disaster was
reduced from 14.8% to 7.6%, 0.2% and 0.0%, respec-
tively.
The solutions described above are fully consistent
with findings by (Maya and S
¨
orensen, 2011). More-
over, the simplest scenario considering 25% of the
total monetary and person-hour budgets was exactly
solved, and the optimal solution matched with the one
achieved using DACS. Thus, we can conclude that
both the the solution method based on GRASP and
VNS and the DACS algorithm find the optimal solu-
tion for the considered accessibility problem.
Double Ant Colony System to Improve Accessibility after a Disaster
85

6 CONCLUSIONS
We have proposed a novel double ant colony system
(DACS) to deal with an accessibility problem after a
natural disaster aimed at maximizing the number of
survivors that reach the nearest regional center in a
minimum time by planning which rural roads should
be repaired given the available financial and human
resources.
The performance of the proposed algorithm has
been analyzed in an instance related to Haiti natural
disasters in 2008, and the results demonstrate that the
optimal solution is found.
Regarding future research lines, a possible par-
allelization could be incorporated to DACS, and it
should be compared with other heuristics, such as ar-
tificial bee colony, on several instances. Besides, the
DACS approach could also be used for the repair of
the road network after a natural disaster which in-
volves additional concerns, such as minimizing the
length of time required for road repair or minimizing
risk to rescuers.
ACKNOWLEDGEMENTS
The paper was supported by the Spanish Ministry
of Science and Innovation project MTM2011-28983-
C03-03 and the Spanish Ministry of Economy and
Competitiveness MTM2014-56949-C3-2-R.
REFERENCES
Campbell, A., Lowe, T., and Zhang, L. (2006). Upgrading
arcs to minimize the maximum travel time in a net-
work. Networks, 477:72–80.
Chen, H.-K., Chou, H.-W., Ho, P.-S., and Wang, H. (2011).
Real-time vehicle routing for repairing damaged in-
frastructures due to natural disasters. Mathematical
Problems in Engineering, 2011:25 pages.
Chen, Y. and Tzeng, G. (1999). A fuzzy multi-
objective model for reconstructing post-earthquake
road-network by genetic algorithm. International
Journal of Fuzzy Systems, 2:85–95.
Cormen, T., Leiserson, C., and Rivest, R. (1990). Introduc-
tion to Algorithms. MIT Press, Cambridge.
Donnges, C. (2003). Improving access in rural areas:
Guidelines for integrated rural accessibility planning.
Technical report, International Labour Organization.
Dorigo, M. and Gambardela, L. (1997a). Ant colonies
for the traveling salesman problem. Biosystems,
43(2):73–81.
Dorigo, M. and Gambardela, L. (1997b). Ant colony sys-
tem: A cooperative learning approach to the traveling
salesman problem. IEEE Transactions on Evolution-
ary Computation, 1(1):53–66.
Feng, C. and Wang, T. (2003). Highway emergency re-
habilitation scheduling in post-earthquake 72 hours.
Journal of the Eastern Asia Society for Transportation
Studies, 5:3276–3285.
Lebo, J. and Schelling, D. (2001). Design and appraisal of
rural transport infrastructure ensuring basic access for
rural communities. Technical report, World Bank.
Lee, C. (2003). Using the genetic algorithm to solve the
scheduling problem for repairing the post earthquake
road networks. Master’s thesis, National Cheng-Kung
University, Taiwan.
Liao, H. (2005). A study on network reconstruction and re-
lief logistics. PhD thesis, National Central University,
Taiwan.
Maya, P. and S
¨
orensen, K. (2011). A grasp metaheuristic to
improve accessibility after a disaster. OR Spectrum,
33:525–542.
Moe, T. and Pathranarakul, P. (2006). An integrated ap-
proach to natural disaster management: Public project
management and its critical success factors. Disaster
Prevention Management, 15:396–413.
Mu
˜
noz, H., Jim
´
enez-Mart
´
ın, A., and Mateos, A. (2015). An
ant colony system adaptation to deal with accessibility
issues after a disaster. In Operations Research Pro-
ceedings 2014. Springer.
OCHA-UN (2008). Haiti flash appeal 2008. Technical re-
port, Office for the Coordination of Humanitarian Af-
fairs.
Sacrist
´
an, V. (2015). An
´
alisis de la eficiencia de los sistemas
de colonias de hormigas para problemas de accesibil-
idad. Master’s thesis, Departamento de Inteligencia
Artificial, Universidad Polit
´
ecnica de Madrid, Spain.
Sato, T. and Ichii, K. (1996). Optimization of post-
earthquake restoration of lifeline networks using ge-
netic algorithms. Japan Society of Civil Engineers,
53:245–256.
Wang, F. (2008). Scheduling for repairing damaged net-
works under imprecise information in earthquakes.
Master’s thesis, Department of Civil Engineering, Na-
tional Central University, Taiwan.
Yan, S. and Shih, Y.-L. (2009). Optimal scheduling of emer-
gency roadway repair and subsequent relief distribu-
tion. Computers and Operations Research, 36:2049–
2065.
Yan, S. and Shih, Y.-L. (2012). An ant colony system-
based hybrid algorithm for an emergency roadway re-
pair time-space network flow problem. Transportmet-
rica, 8:361–386.
Zhang, T. and Lu, Y. (2011). Study on simulation and op-
timization of the road rush-repair model after disaster.
Applied Mechanic and Materials, 50:298–303.
Zheng, Y.-J., Chen, S.-Y., and Ling, H.-F. (2015). Evolu-
tionary optimization for disaster relief operations: A
survey. Applied Soft Computing, 27:553–566.
ICORES 2016 - 5th International Conference on Operations Research and Enterprise Systems
86
