
Activity Recognition based on High-Level Reasoning
An Experimental Study Evaluating Proximity to Objects and Pose Information
Julia Richter, Christian Wiede, Enes Dayangac, Markus Heß and Gangolf Hirtz
Department of Electrical Engineering and Information Technology
Chemnitz University of Technology, Reichenhainer Str. 70, 09126 Chemnitz, Germany
Keywords:
Video Analysis, 3-D Image Processing, Activity Recognition, Pose Estimation, High-Level Reasoning,
Ambient Assisted Living.
Abstract:
In the context of Ambient Assisted Living (AAL), the detection of daily activities is an active field of research.
In this study, we present an algorithm for the performed Activities of Daily Living (ADLs) related to personal
hygiene, which is based on the evaluation of a person’s proximity to objects and pose information. To this end,
we have employed a person detection algorithm that provides a person’s position within a room. By fusing the
obtained position with the objects’ position, we were able to deduce whether the person was occupied with a
certain object and to draw conclusions about the performed ADLs. One prerequisite for a reliable modelling
of human activities is the knowledge about the accuracy of the person detection algorithm. We have, therefore,
analysed the algorithm with regard to its accuracy under different, application-specific conditions. The results
show that the considered algorithm ensures high accuracy for our AAL application and that it is even suitable
for environments, in which objects are very close to each other. On the basis of these findings, tests with
video sequences have been conducted in an AAL environment. This evaluation confirmed that the reasoning
algorithm can reliably recognise activities related to personal hygiene.
1 INTRODUCTION
In recent years, a lot of studies have been set on
the development of technical support systems for the
maintenance of human care standards. The central
aim of the AAL system we have developed together
with our medical partners is to provide assistance for
elderly people and their caregivers, so that the elderly
can continue to live in their familiar environment in-
stead of moving to a nursing home. Besides assisting
elderly, our system supplies caregivers and relatives
with information that helps to optimise the care pro-
cess. In this study, we focus on elderly people at an
early stage of dementia, firstly because they are the
group most likely to forget their daily routines, and
secondly because they are often incapable of commu-
nicating to their caregivers, which daily routines they
have already performed. We aim, therefore, at pro-
viding caregivers with meta information about their
patients’ daily activities (ADLs). Based on this infor-
mation, caregivers can be supported in planning the
individual care process and in assessing their patients’
need of care.
For this purpose, we detect ADLs by utilising so-
called smart sensors. These sensors consist of stereo
cameras with an internal processing unit that monitors
ADLs. We thus attach high importance to privacy is-
sues: the sensors, which are mounted at the ceiling
of the living environment, make information about
ADLs available – without releasing raw image data,
as it is stored in a database in the form of meta data.
This system also generates reminding messages for
the elderly if they failed to perform certain activities.
Furthermore, the contents of the database can be ac-
cessed by the caring personnel via a web interface. By
this means, the caring personnel can obtain relevant
information that has been inaccessible so far. It en-
ables caregivers to interpret a patient’s uncooperative
behaviour in the morning when a disturbed sleeping
pattern has been detected the previous night. More-
over, drastic changes in the daily activities can be no-
ticed, so that caregivers can react promptly and adapt
the caring process to the actual situation. These ex-
amples illustrate how the assistance and information
system can contribute to a better understanding of the
patient’s behaviour and improve the caring process.
With the presented approach, it will be possible for
caregivers to respond appropriately to their patients’
individual needs. Current assistance systems have not
yet considered the above mentioned aspects.
Richter, J., Wiede, C., Dayangac, E., Heß, M. and Hirtz, G.
Activity Recognition based on High-Level Reasoning - An Experimental Study Evaluating Proximity to Objects and Pose Information.
DOI: 10.5220/0005658804150422
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 415-422
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
415

2 RELATED WORK
In order to identify special demands or detect emer-
gencies, several approaches have been developed that
monitor a person’s daily activities, for example the
use of motion detectors (Steen et al., 2013) or body-
worn sensors (Scanaill et al., 2006). In the work of
Pirsiavash et al. (Pirsiavash and Ramanan, 2012),
ADLs are detected by a wearable camera that pro-
cesses the first-person camera view. In our project,
we have decided to employ non-wearable, optical sen-
sors, i. e. wide-angle stereo cameras, since people
with dementia are apt to put wearable sensors off and
to forget them. Besides, more valuable information
can be derived from image data than from motion de-
tectors.
One indicator for ADLs is the room in which the
person stays (Steen et al., 2013; Richter et al., 2014).
In the context of an AAL project, Richter et al. have
introduced a person detection algorithm that assigns
a room to the person’s current position. Based on
the chronological order of the rooms a person en-
tered, conclusions about the performed ADLs could
be drawn. If the person was detected in the sleeping
room at the beginning of the day and afterwards in
the bathroom for a few minutes, it can be inferred that
the person has attended to his or her personal hygiene.
Conclusions about other ADLs, such as the prepara-
tion of food, which is usually done in the kitchen, or
the leaving of the flat, can be drawn in a similar way.
However, for a more reliable ADL prediction, the
analysis of the room alone is insufficient. For this rea-
son, we have developed an algorithm that deduces the
performed activities by evaluating the proximity of a
person to certain objects in the room. Moreover, pose
information obtained by a machine learning based ap-
proach (Richter et al., 2015) is used in order to draw
conclusions about the activity. The presented study
focuses on three objects in the bathroom, the sink, the
shower and the toilet. This choice was mainly moti-
vated by medical reasons. The frequency of toileting,
for example, provides relevant information for diag-
nosing and treating incontinence.
In order to determine the proximity of a person
to a certain object, the person’s position in the room
has to be known. Due to the large number of algo-
rithms, a brief summary of the state-of-the-art person
detection algorithms should suffice here. Harville et
al. (Harville and Li, 2004) used a stereo camera and a
person detection algorithm similar to the one already
described (Richter et al., 2014). By using the gener-
ated depth map as an input, they estimated the virtual
overhead view (plan view), which they used for per-
son detection and tracking. Furthermore, they dealt
with occlusions and 3-D noise by combining occu-
pancy and height maps. Yous et al. (Yous et al.,
2008) introduced the world z-map, which represents
the z coordinate of the corresponding world point
for every pixel. Their algorithm utilises the fact that
the boundaries between close objects persist, whereas
they merge on the plane view. In this approach, the
height of the mounted camera in relation to the floor
and the angle in relation to the wall are required for
the determination of the world coordinates of a certain
point.
Both these studies have revealed shortcomings of
their stereo vision-based algorithms. Harville et al.
(Harville and Li, 2004) determined a point-wise mean
positional error from ground truth of 16 cm. Yous et
al. (Yous et al., 2008) evaluated their algorithm by a
video in which each detected person was marked by a
cuboid. Furthermore, false positive and false negative
rates were calculated. However, neither of the studies
provided detailed numerical results about spatial ac-
curacy. When applying a person detection algorithm,
it is essential to know the grade of reliability of the de-
termined position in order to draw conclusions about
the performed activity. If the person is detected close
to the toilet, for example, it is necessary to know how
reliable this information is in order to avoid misin-
terpretations. If the error of the person detection al-
gorithm reaches or exceeds the distance between the
objects, the assignment to a certain object is unreli-
able.
In our project, we utilise the person detection al-
gorithm described in (Richter et al., 2014) with the
aim of refining the room assignment to the assignment
of objects the person is probably occupied with. Since
detailed spatial accuracy measurements have not yet
been considered for this algorithm and since there is
no standard method to be found in literature, we have
developed a method to determine the accuracy in dif-
ferent conditions and scenarios (walking speed, walk-
ing direction, exposure time, distance from sensor).
By means of this analysis, the accuracy of the algo-
rithm described by Richter et al. (Richter et al., 2014)
has been determined in order specify the occurring
errors and that might lead to false conclusions with
regard to the activities. We thus introduce a method,
which can also be applied to other person detection
algorithms that determine a person’s position in the
world.
The accuracy analysis presented in this study
yields that persons can be localised in a very accu-
rate way, so that the determined position can be relied
on even if the specific objects are very close to each
other. On the basis of this finding, we have developed
a reasoning algorithm that recognises activities per-
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
416
formed in a bathroom. In addition, we have evaluated
the algorithm in our testing flat under realistic con-
ditions by comparing the activity determined by the
algorithm with labelled video sequences.
The algorithm for reasoning about ADLs is pre-
sented in section 3, whereas the employed and anal-
ysed person detection algorithm and the pose esti-
mation algorithm are briefly summarized in section
3.1 and section 3.2 respectively. Section 4 presents
the methods of analysis for the person detection and
the reasoning algorithm. The results of both analyses
are presented and discussed in sections 5.1 and 5.2.
In section 6, conclusions about the accuracy of both
the person detection and the reasoning algorithm are
drawn. Besides, an outline regarding the detection of
further ADLs by employing the presented approach is
given.
3 METHODS AND
IMPLEMENTATION
3.1 Location Data Acquisition from
Person Detection Algorithm
The employed person detection algorithm (Richter
et al., 2014) is able to locate several persons in 3-
D coordinates by processing the 3-D point cloud de-
rived from stereo data. In principal, this algorithm
works for any sensor providing a 3-D point cloud. In
our study, high-quality wide field of view lenses with
a focal length of 3.5 mm and small radial distortion
are employed. The image resolution is 1360 × 1024
pixels. The stereo sensor has a baseline distance of
150 mm. Firstly, the algorithm derives foreground hy-
potheses from the world z-map by applying a mixture
of Gaussian segmentation method (Zivkovic, 2004),
while the learning rate is set to 0.01 in our study. All
points belonging to the foreground are projected onto
the floor plane that was previously defined during ex-
trinsic camera calibration. In this floor plane view,
blobs of a certain size are detected. The maximum
z value in a blob defines the height, the size of the
blob defines the width as well as the length of the
cuboid that finally characterises the detected person.
The center of the cuboid denotes the person’s loca-
tion in the scene. In Figure 1, a detected person of
an example recording is shown. At this point, the x
and y components of the center point, i. e. the pro-
jection of the location onto the floor p
s
= (x
s
,y
s
), are
used for the proximity determination, whereas the z
component is not relevant at this point.
During the accuracy analysis, the person is al-
ways moving and therefore constantly detected as
foreground. In our practical AAL application, how-
ever, when a person is resting for a longer time, previ-
ously detected foreground pixels will become back-
ground. In order to localise persons even in such
cases, we additionally detect persons by employing
a head-shoulder detection algorithm (Dayangac et al.,
2015).
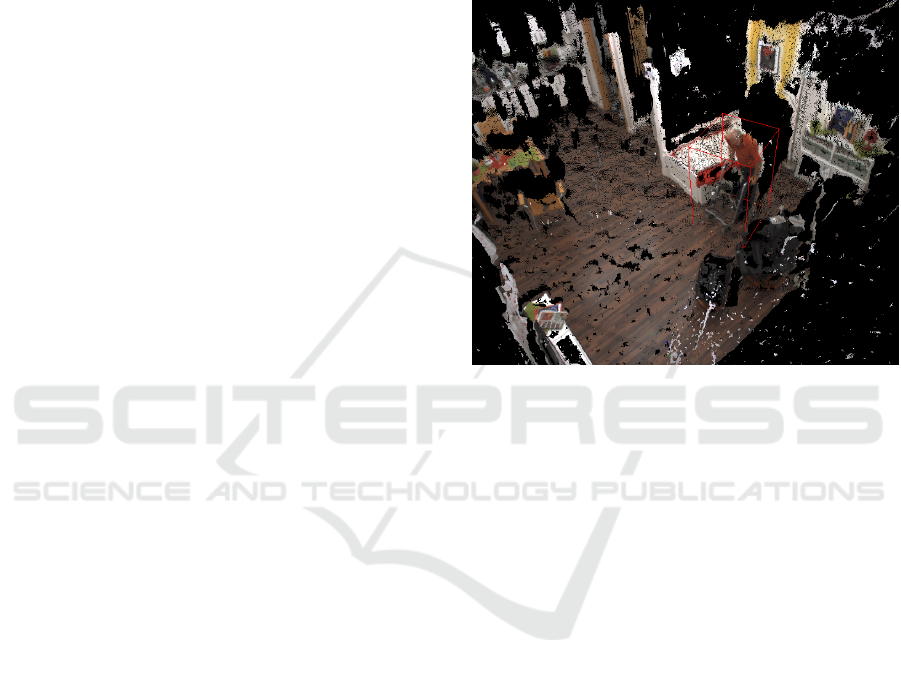
Figure 1: Example point cloud of a proband in our testing
flat. The detected person is characterised via a cuboid in
3-D data.
3.2 Pose Information
Information about the general pose is obtained by us-
ing the algorithm described by (Richter et al., 2015).
In this approach, a classifier is trained using a Support
Vector Machine by assigning the points belonging to
the person’s point cloud according to their z compo-
nent to vertically aligned bins. Depending on the cal-
culated feature vector, the classifier predicts whether
the person is standing, sitting or lying. In our study,
we evaluate whether a person is sitting or standing.
3.3 Reasoning About ADLs
For reasoning about ADLs, it is required to determine
whether the detected person is close to a certain ob-
ject. Therefore, the stereo sensors that are distributed
in the test flat have been calibrated in such a way
that they all share the same world coordinate system.
The objects’ positions (objects’ centres) with respect
to the origin of the coordinate system as well as the
expansions of relevant and fixed object, such as bed,
refrigerator, shower, basis and toilet, have been stored
in a look-up-table (LUT). Consequently, if there are n
objects, the LUT contains n entries with the according
Activity Recognition based on High-Level Reasoning - An Experimental Study Evaluating Proximity to Objects and Pose Information
417

object centres and their expansions. These expansions
serve as thresholds thresh
n
for the proximity determi-
nation.
In order to determine whether a person is close to
an object, the distance dist
n
between the person’s po-
sition p
s
= (x
s
,y
s
) and all the objects’ positions p
o,n
=
(x
o,n
,y
o,n
) is compared with the according expansion
values thres
n
in the LUT, whereas n = {1,2,..., N},
Hereby, N denotes the number of objects and n the
index of a specific object. If the distance between the
person’s center and the object’s center is smaller than
the defined threshold value in the LUT, the person is
considered to be interacting with the object. In this
case, the boolean variable close is 1, otherwise it is
0. The following two equations are applied n times if
there are n objects in a room. In the presented project,
three objects, i. e. sink, shower and toilet, are present
in the bathroom of our testing flat.
dist
n
=
k
p
o,n
− p
s
k
, (1)
close =
(
1, if dist
n
< thresh
n
0, otherwise.
(2)
At this point, it should be stated that the bathroom
is relatively small (approximately 2.00 m × 1.80 m)
compared to other rooms in our testing flat. This
results in a more challenging assignment, because the
objects are very close to each other.
This procedure, in combination with pose infor-
mation (standing and sitting), allows us to reason
about the following ADLs:
- Activities that are typical performed when standing
in front of a sink, such as washing hands, comb-
ing, teeth brushing, etc., if the person is close to
the sink and standing.
- Using the toilet if the person is close to the toilet
and sitting.
- Taking a shower if the person is close to the shower
and standing.
If the person is detected in the shower and stand-
ing, then the algorithm outputs the activity ”Taking a
shower”. If the person is detected close to the sink,
then it is concluded that the person performs activi-
ties that are typically for standing in front of a sink,
like ”washing hands, combing, teeth brushing, etc.”.
Similarly, if the person’s center is near the toilet and
the person is detected to be sitting, we reason that the
person probably uses the toilet. If none of the previ-
ously mentioned scenarios occur, we assume that the
person is doing another action.
Figure 2 shows a scenario in the bathroom of our
testing flat, where a person is attending to his or her
personal hygiene.
Figure 2: The person is detected very close to the toilet.
Moreover, the algorithm determined that the person is sit-
ting. Based on this information, the system reasons that the
person is probably using the toilet. This view was gener-
ated in debug mode. Due to privacy aspects, it is not visible
outside of the smart sensor in the final application.
4 ANALYSIS METHODS
In the following section, the analysis methods of both
the person detection algorithm and the reasoning al-
gorithm for the ADLs are presented.
4.1 Person Detection
In order to determine the the accuracy of the person
detection algorithm (Richter et al., 2014), the output
of this algorithm is compared with the position infor-
mation provided by a reference system. Each time
both a stereo measurement p
s
and a reference mea-
surement p
r
are obtained, the error e of the stereo
measurement is calculated as the Euclidean distance
between these two values.
e =
k
p
r
− p
s
k
. (3)
Error histograms are generated for every scenario
on the basis of these error measurements. They illus-
trate the relative occurrence of the errors within dif-
ferent error intervals.
4.1.1 Position Data Acquisition from Reference
System
The reference system is completely independent from
the stereo sensor system. It is composed of infra-red
emitters and cameras that are able to detect special
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
418

rigid bodies. The reference system provides reliable
data at a frame rate of 120 FPS, so that higher walk-
ing speeds have no critical influence on the reference
measurement. In order to obtain reliable reference
data even with occurring reflections and occlusions,
eight of such devices are installed in the surveyed
volume, so that a good coverage with redundancy is
achieved. These emitters and cameras are distributed
along a rectangle on the ceiling that surrounds the sur-
veyed area. The rigid body that has been designed for
this accuracy analysis is a symmetric construction of
four infra-red reflecting markers. This device is in-
stalled in the center of a helmet, which a person wears
on the head during all recordings. This construction
is designed in such a way that it does not influence
the stereo measurement. The reference system out-
puts the 3-D center position of the rigid body. In this
study, only the x and the y coordinates of the 3-D po-
sition, denoted as p
r
= (x
r
,y
r
), are used.
In order to directly compare the measured posi-
tion and the reference position, both the reference and
the stereo camera system are extrinsicly calibrated, so
that they share the same world coordinate system.
4.1.2 Analysis Method
In order to obtain statements about the accuracy, the
following different parameter configurations are in-
vestigated:
Table 1: Description of the scenario configurations.
Scenario Description
1 Distance from the stereo sensor, de-
termined for the scenario configura-
tions 2 - 3
2 Moving speed: slow (≈ 0.3 m/s) vs.
fast (≈ 1.3 m/s)
3 Moving direction: parallel vs. per-
pendicular to the optical axis of the
stereo sensor
4 Exposure time: high (40 ms) vs.
low (10 ms)
By setting the mentioned exposure times, a dark
scene with low background illumination as well as a
bright scene with very high illumination have been re-
produced. For scenario 2 to scenario 4, two video se-
quences with one person walking within the surveyed
area have been recorded for each scenario, whereas
the exposure time was 20 ms for scenario 2 and 3. All
these recordings were used for scenario 1.
Moreover, the mean, minimum and maximum er-
ror have been calculated for every scenario. In order
to investigate how the distance between sensor and
person influences the error, the mean error has been
calculated for different radius intervals using all the
recordings from scenario 2 to scenario 4. The inter-
val limits are 500 mm, 1000 mm, 1500 mm, 2000 mm,
2500 mm, 3000 mm and 3500 mm (see Figure 3). For
each interval, the mean error is calculated and plotted
in the middle of the interval.
4.2 Reasoning Algorithm
In order to evaluate the reasoning algorithm, three
video sequences with three different persons have
been recorded in the bathroom of our testing flat. In
these sequences, a typical morning routine is repro-
duced: Each testing person is entering the bathroom
and attending to his or her usual personal hygiene.
Thereby, typical activities, such as using the toilet,
washing the hands and showering, are performed. Ev-
ery frame is recorded with a time-stamp. At the same
time, the system subsequently outputs the determined
ADL, accompanied by the time-stamp, into a file. Af-
ter the sequence has been recorded, every frame was
labelled with the actual ADL. Afterwards, both the
labelled ADL as well as the action that has been de-
termined by our system is plotted over time. In this
way, the output of the system can be compared against
ground-truth data. Moreover, it is possible to identify
potential delays the system exhibits.
5 RESULTS AND DISCUSSION
5.1 Person Detection
In this section, the results of the person detection anal-
ysis are presented and discussed for each scenario.
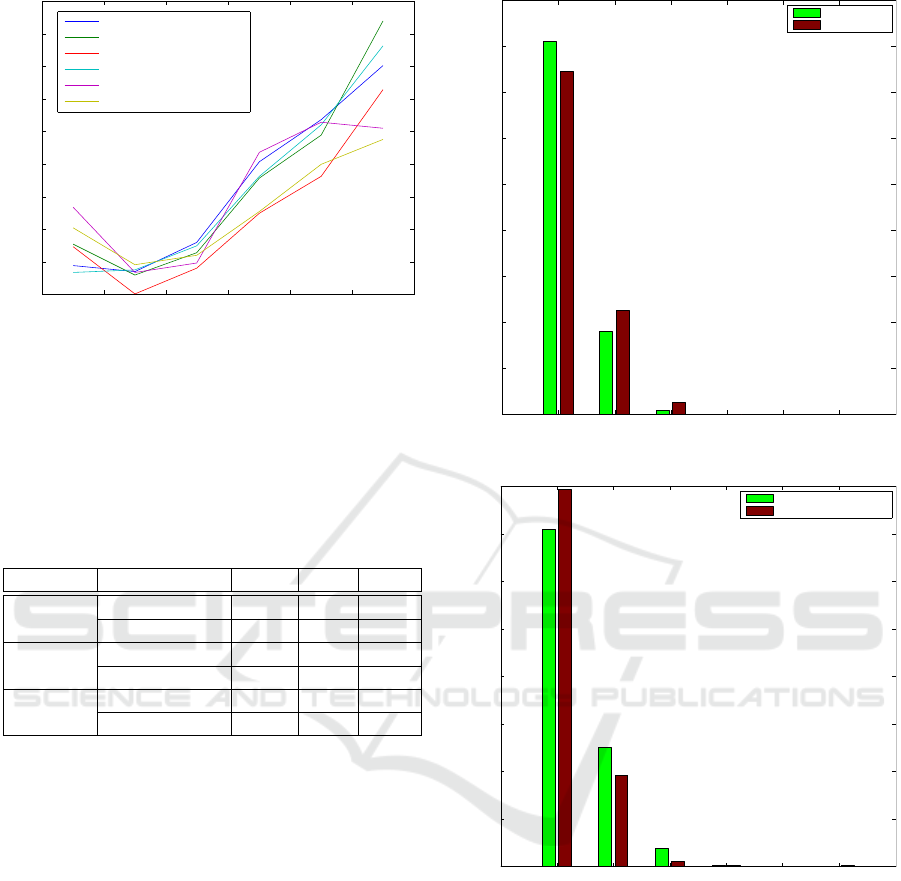
Figure 3 illustrates the influence of the distance
to the mean of the error, whereas the information be-
tween the measured mean values is linearly interpo-
lated.
The graphs show a higher error between the po-
sition measured by the stereo camera and the refer-
ence position in the range with a small distance to the
stereo sensor (≤ 1000 mm). For distances higher than
1000 mm, a tendency of an increasing mean error can
be observed. Generally, it can be stated that the mean
error will further increase at higher distance, because
the accuracy of the stereo data decreases with higher
distance.
In Table 2, the mean, the minimum and the max-
imum error for each parameter configuration of sce-
nario 2 to scenario 4 are listed. The mean errors
show values ranging from 74 mm to 87 mm, which
is accurate enough for our application, because the
Activity Recognition based on High-Level Reasoning - An Experimental Study Evaluating Proximity to Objects and Pose Information
419
500 1000 1500 2000 2500 3000 3500
50
60
70
80
90
100
110
120
130
140
Distance from sensor in mm
Error in mm
Exposure time: 10 ms
Exposure time: 40 ms
Slow movement
Fast movement
Parallel to optical axis
Perpendicular to optical axis
Figure 3: Scenario 1. Influence of the distance on the
mean error for the defined intervals. For distances higher
than 1000 mm, the error between the position measured by
the stereo camera and the reference position increases from
about 60 mm to a range from 100 mm to 130 mm.
distances between sink, shower and toilet are several
times higher.
Table 2: Determined mean, minimum and maximum errors
for scenario 2 to scenario 4. All numbers in mm.
Scenario Configuration mean min. max.
2
Slow 74 2 339
Fast 83 2 654
3
Parallel 87 1 416
Perpendicular 76 1 842
4
Exp. 40 ms 83 1 396
Exp. 10 ms 86 2 398
In the following, the histograms are presented and
discussed for each scenario. In Figure 4, the results
for the two different moving speeds are presented.
Figure 4 and Table 2 show that the person detection
algorithm is more accurate for slower movements.
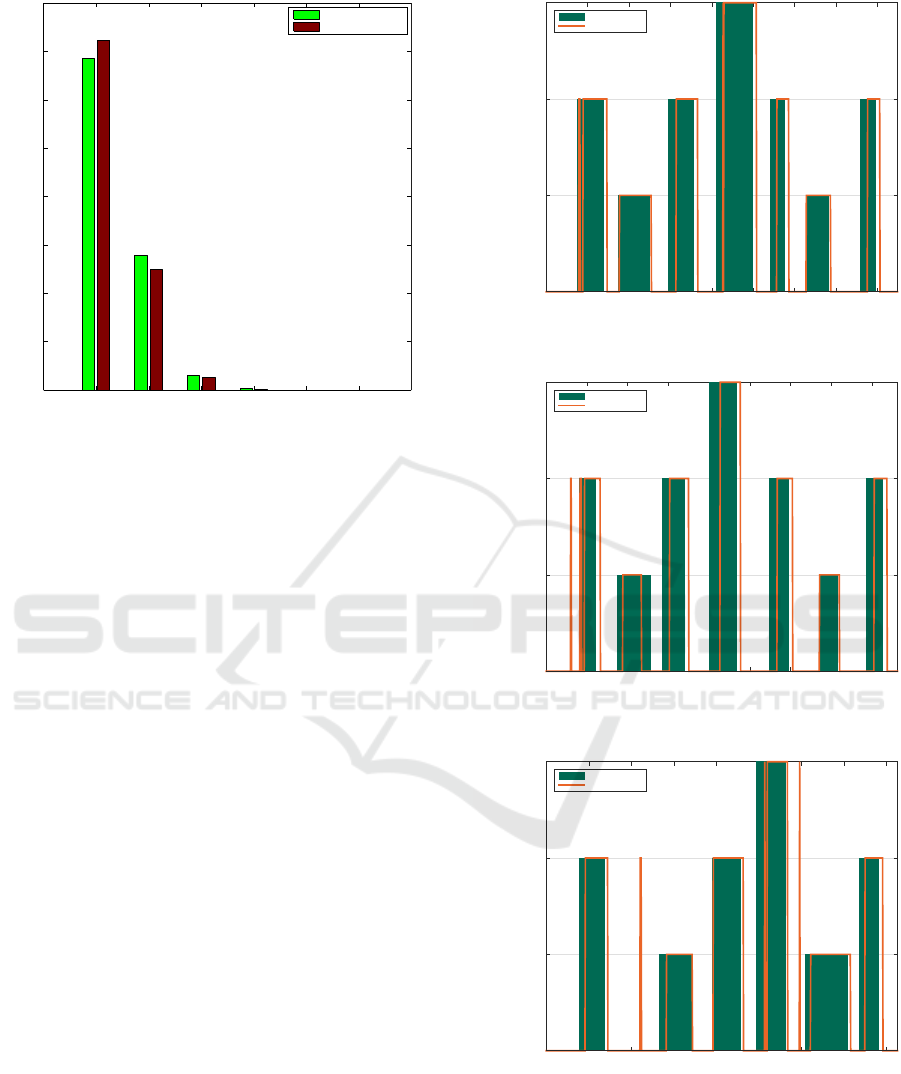
Figure 5 shows the results for the two different
moving directions.
In this experiment, we expected that the parallel
movement shows better results than the perpendicular
movement. This assumption is based on the fact, that
one stereo sensor just provides the 3-D points of the
part of a person that is visible to the sensor, i. e. half
of the person’s surface, either viewed from the side or
from the front or back respectively.
When the person is viewed from the side, the
points belonging to the arm and shoulder might cause
the center of these points to be located near the
shoulder instead near the actual body center (head).
When the person is viewed from the front or back re-
spectively, the center of the visible surface points is
more likely to be located near the actual body cen-
ter. Therefore, we expected that the center is shifted
< 100 100−200 200−300 300−400 400−500 > 500
0
10
20
30
40
50
60
70
80
90
Error in mm
Relative number in %
Slow movement
Fast movement
Figure 4: Histogram for scenario 2, moving speed.
< 100 100−200 200−300 300−400 400−500 > 500
0
10
20
30
40
50
60
70
80
Error in mm
Relative number in %
parallel to optical axis
perpendicular to optical axis
Figure 5: Histogram for scenario 3, moving direction.
to one shoulder when the person moves perpendicular
(viewed from the side), while the shift to the person’s
back or front is expected to be smaller when the per-
son walks parallel to the optical axis (viewed from
the front). In contrast to the expectation, the results of
the perpendicular movement direction are even better
than those of the parallel direction according to Fig-
ure 5.
Figure 6 shows the results for the two different
exposure times that represent different lighting con-
ditions in an AAL environment (bright scene vs. dark
scene).
In this test set-up, the person detection algorithm
performs slightly better in the brighter scene with the
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
420
< 100 100−200 200−300 300−400 400−500 > 500
0
10
20
30
40
50
60
70
80
Error in mm
Relative number in %
Exposure time: 10 ms
Exposure time: 40 ms
Figure 6: Histogram for scenario 4 (exposure time).
exposure time of 40 ms.
Generally, it can be observed that a configuration
change has only a slight effect on the results. The his-
tograms show only a small difference for the param-
eter changes. Furthermore, Figure 3 shows that the
plotted lines are close to each other, which demon-
strates that the error is similarly high for the different
scenarios. Consequently, the experiments proved that
the person detection algorithm is rather robust against
these changes. During the experiments, systematic er-
rors are occurring. We assume that the major inaccu-
racies in the measurements originate from the cali-
bration procedures, i. e., intrinsic and stereo calibra-
tion as well as during the extrinsic calibration of the
stereo and the reference system. Even a small mis-
alignment of these coordinate systems will result in
a measurement inaccuracy that linearly increases for
higher distances. Random errors may occur when the
measurement system fails to detect the rigid body cor-
rectly because of occlusions or reflections.
5.2 Reasoning Algorithm
The following three figures illustrate the results for
each recorded sequence. The green-shaded bars rep-
resent the real, i. e. the manually labelled, activity.
The activity that was determined by the system is
marked with an orange line. The ordinate shows the
time in seconds, whereas the abscissa shows the ac-
tivity.
The graphs show that the reasoning algorithm
shows results of high quality even for the small bath
room in our testing flat. During all sequences, only
few minor peaks with a false detection occur. Fur-
thermore, there is a small delay of only a few sec-
Time in seconds
0 20 40 60 80 100 120 140 160
Activity
Other
Using toilet
Washing hands
Taking a shower
Real Pose
Determined Pose
Figure 7: Test person 1: Comparison between labelled
(green) and real (orange) activity.
Time in seconds
0 20 40 60 80 100 120 140 160
Activity
Other
Using toilet
Washing hands
Taking a shower
Real Pose
Determined Pose
Figure 8: Test person 2: Comparison between labelled
(green) and real (orange) activity.
Time in seconds
0 20 40 60 80 100 120 140 160
Activity
Other
Using toilet
Washing hands
Taking a shower
Real Pose
Determined Pose
Figure 9: Test person 3: Comparison between labelled
(green) and real (orange) activity.
onds visible. The delay is caused by a Kalman filter
that is used as a tracker in the person detection al-
gorithm. Additionally, the reasoning algorithm is de-
signed as a low-pass filter in order to filter very small
peaks. In view of AAL applications with activities
Activity Recognition based on High-Level Reasoning - An Experimental Study Evaluating Proximity to Objects and Pose Information
421

spanning over a time of several minutes, neither the
peaks nor the delay have an effect on the function-
ality. To sum up the results, the reasoning algorithm
was able to detect all the activities that were part of the
reconstructed morning scene, except only a few small
peaks with a false detection. Thus far, no method can
be found in literature that addresses activity recogni-
tion related to hygiene aspects in AAL environments
in a comparable way.
6 CONCLUSIONS AND FUTURE
WORK
In this study, an algorithm for reasoning about ADLs
has been presented, which evaluates the proximity of
relevant objects as well as the person’s pose. In order
to determine whether the chosen person detection al-
gorithm is theoretically accurate enough – even when
objects are close to each other – the accuracy of the
algorithm has been analysed with respect to different
parameters relevant in AAL scenarios.
As a result, the algorithm has proved sufficient
quality. It can consequently be stated that this algo-
rithm is appropriate for our AAL application, where
relevant objects are close to each other. Moreover,
the accuracy analysis has been designed in an univer-
sal fashion, so that other person detection algorithms
can be analysed under similar conditions, which fa-
cilitates comparisons. The experiments demonstrate
that the algorithm is accurate with regard to changing
conditions that prevail in AAL environments.
The evaluation of the reasoning algorithm in the
testing flat demonstrated that activities normally per-
formed in front of a sink, such as ”washing hands,
combing, teeth brushing, etc.”, ”showering” and ”us-
ing the toilet” could be accurately determined. The
tests were conducted in the comparatively small bath-
room of our testing flat, so that it can be assumed
that our approach would also show good results in
larger rooms. We plan to extend the algorithm to more
objects in other rooms, in order to recognise further
ADLs, such as ”preparing a meal”, ”washing up” or
”cooking”. In addition, we intend to conduct more
tests with probands in our testing flat and to integrate
the designed system in real living environments. At
this point, we will continue working together with lo-
cal housing associations and care facilities.
In summary, technical support systems could con-
tribute to a higher quality of care. By giving advice,
sending reminding messages to patients and provid-
ing care-related information to caring personnel, these
modern developments could be beneficial to patients,
caring personnel and relatives alike.
ACKNOWLEDGEMENTS
This project is funded by the European Social Fund
(ESF).
REFERENCES
Dayangac, E., Wiede, C., Richter, J., and Hirtz, G. (2015).
Robust Head-shoulder Detection using Deformable
Part-based Models. In 10th International Confer-
ence on Computer Vision Theory and Applications
(VISAPP-2015), pages 236–243.
Harville, M. and Li, D. (2004). Fast, integrated person
tracking and activity recognition with plan-view tem-
plates from a single stereo camera. In Computer Vi-
sion and Pattern Recognition, 2004. CVPR 2004. Pro-
ceedings of the 2004 IEEE Computer Society Confer-
ence on, volume 2, pages II–398. IEEE.
Pirsiavash, H. and Ramanan, D. (2012). Detecting activities
of daily living in first-person camera views. In Com-
puter Vision and Pattern Recognition (CVPR), 2012
IEEE Conference on, pages 2847–2854. IEEE.
Richter, J., Christian, W., and Hirtz, G. (2015). Mobility
Assessment of Demented People Using Pose Estima-
tion and Movement Detection. In ICPRAM Lisbon,
Fourth International Conference on Pattern Recogni-
tion Applications and Methods, pages 22–29.
Richter, J., Findeisen, M., and Hirtz, G. (2014). Assess-
ment and Care System Based on People Detection
for Elderly Suffering From Dementia. In Consumer
Electronics Berlin (ICCE-Berlin), 2014. ICCE Berlin
2014. IEEE Fourth International Conference on Con-
sumer Electronics, pages 59–63. IEEE.
Scanaill, C. N., Carew, S., Barralon, P., Noury, N., Lyons,
D., and Lyons, G. M. (2006). A Review of Ap-
proaches to Mobility Telemonitoring of the Elderly in
Their Living Environment. Annals of Biomedical En-
gineering, 34(4):547–563.
Steen, E.-E., Frenken, T., Frenken, M., and Hein, A. (2013).
Functional Assessment in Elderlies Homes: Early Re-
sults from a Field Trial. Lebensqualit
¨
at im Wandel von
Demografie und Technik.
Yous, S., Laga, H., Chihara, K., et al. (2008). People de-
tection and tracking with world-z map from a single
stereo camera. In The Eighth International Workshop
on Visual Surveillance-VS2008.
Zivkovic, Z. (2004). Improved adaptive Gaussian mixture
model for background subtraction. In Pattern Recog-
nition, 2004. ICPR 2004. Proceedings of the 17th In-
ternational Conference on Pattern Recognition, vol-
ume 2, pages 28–31. IEEE.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
422
