
Stereo Vision on an ARM/DSP Multicore Platform based on Code
Generation using the MATLAB Embedded Coder
Dennis Schuldt
1
, Jörg Thiem
1
and Semir Mustedanagic
2
1
Department of Information and Electrical Engineering, University of Applied Sciences and Arts Dortmund,
Sonnenstraße 96, 44139 Dortmund, Germany
2
Smart Mechatronics GmbH, Kronenburgallee 2, 44141 Dortmund, Germany
Keywords: MATLAB, MATLAB Embedded Coder, ARM Cortex-A8, DSP C674x, VRmagic D3 Platform, Texas
Instruments.
Abstract: Vision based techniques are by now well established means for contactless measuring applications, e.g. in
industrial automation, optical inspection, medical imaging or robot navigation. However, the development
and implementation of these applications on small-sized embedded systems is still challenging, because image
processing algorithms require quite a lot CPU performance. Therefore, code optimization has to be considered
in the development process. In this work we present our results on implementation and benchmarking of
stereo disparity algorithms on an ARM/DSP embedded multicore platform. The algorithms are developed
with the computer algebra framework MATLAB from Mathworks®, which allows to generate generic and
processor-specific C/C++ code automatically. The analysis of the code generation process and the benchmark
of the target performance are the main focus of this contribution.
1 INTRODUCTION
Image processing algorithms, especially stereo
reconstruction algorithms on small-sized embedded
platforms, e.g. mobile robots, make high demands on
the overall processor performance. For this reason,
many research groups all over the world are involved
with this field of investigation. Thus, there already
exist several approaches to get faster disparity
implementations, i.e. faster algorithms or of course
more processor performance.
To mention examples concerning the first
approaches, region-based methods are proposed
which are faster compared to dense stereo
reconstruction but only result in rough disparity
maps. In (Mustafah et al., 2012) the disparity
calculation is based upon object-background
estimation. Therefore, only the measurement of the
distance and size of objects using a stereo vision
system is possible. The algorithms are simple and fast
but the achieved accuracy is poor, e.g. the distance
error is about ±10 cm @ 3m. Lixin et al. (2009)
present their results based on color-segmentation as
comparable to existing methods as far as the disparity
error is concerned. Unfortunately, the calculation
time of this implementation is not supplied in detail
and therefore this cannot be compared.
The second approach is the usage of more
powerful processors, like DSPs (Digital Signal
Processor) or processor optimized algorithms, which
of course should result in faster implementations.
Nevertheless, one has to keep in mind, that with
changing the hardware, a redesign of the
implemented code is required or recommended.
In (Demirovic et al., 2014) the authors show their
results obtained with ARM NEON instructions for
mobile devices using the example of image
registration. Although we can expect significant
speed improvements, mobile devices don’t seem to
compete yet with powerful desktop CPUs.
Nevertheless, mobile processors do have a better
performance per watt.
Welch et al (2012) present their investigations
about the performance speed-up of SIMD
architectures (single instruction multiple data), like
Intel’s SSE or ARM’s NEON, which are
advantageous when the calculation of one pixel does
not affect another one and the algorithms are
parallelizable. Their study is focused on the NEON
SIMD instructions applied on two image processing
algorithms. The bilinear interpolation algorithm
558
Schuldt, D., Thiem, J. and Mustedanagic, S.
Stereo Vision on an ARM/DSP Multicore Platform based on Code Generation using the MATLAB Embedded Coder.
DOI: 10.5220/0005699405580562
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 558-562
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
results in a speedup of about 2 when using SIMD
instructions. The second test, a distortion algorithm,
achieves a speedup factor of 3.
Goldberg and Matthies (2011) presents their 7x7
SAD implementation for disparity estimation on an
ARM/DSP platform for small robots. The stereo
algorithm is implemented on the C64x+ DSP
core@520MHz of the multimedia processor
OMAP3530. This contribution also reveals a good
comparison of several disparity implementations on
DSP platforms, like (Ambrosch et al., 2010),
(Humenberger et al., 2009) and (Khaleghi et al.,
2008). With these results, we can get a well-founded
idea of the expected embedded processor power.
However, the implementations may have to be ported
and optimized for a different kind of processor, if this
is required.
A way out could be the model-based development
of algorithms and the use of automatic generic or
processor-specific code generation, which is already
well-established for example in the development
process of embedded control systems. Regardless of
how efficient the generated image processing code
may be, this approach would help to test the
functionality of the algorithm in a very early stage on
an embedded prototyping system. The upgrade to a
more powerful processor or to a different multicore-
architecture is easier than with manually
implemented code. Of course, this advantage also
applies if there is a hardware redesign during the
development process for other reasons.
2 SYSTEM SETUP
2.1 Camera Hardware Architecture
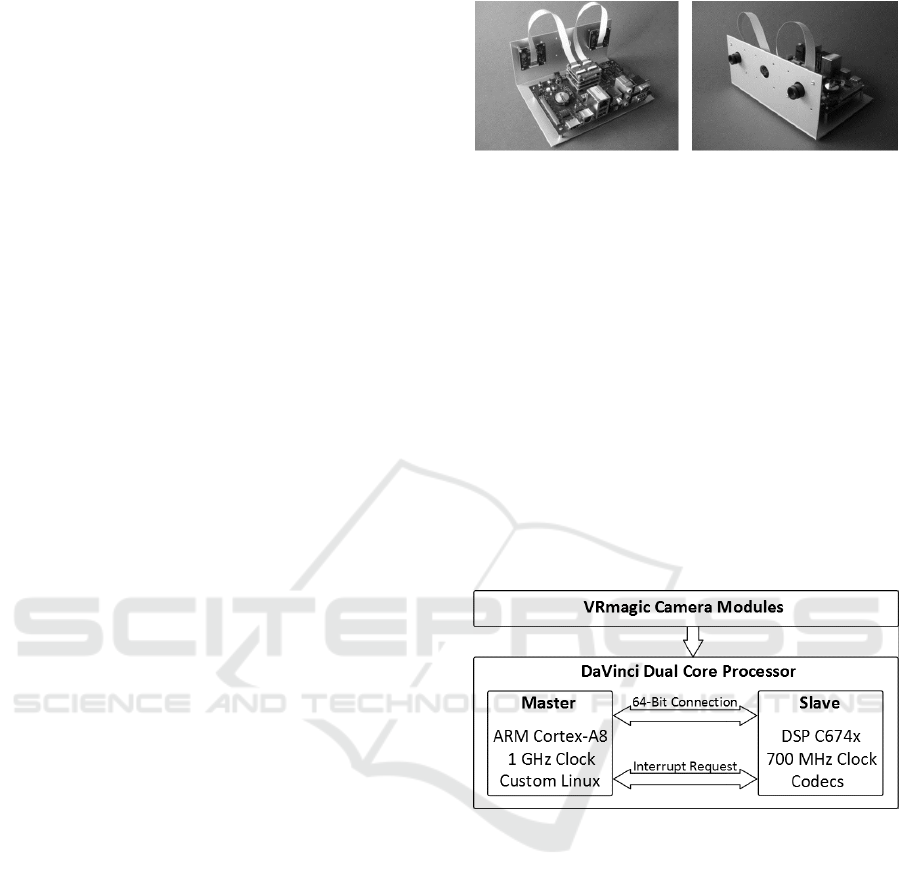
In Fig. 1 you can see the D3 Intelligent Camera
Platform from VRmagic with two camera modules
mounted on the stereo-rig. The evaluation board
provides input and output ports like Ethernet, HDMI,
GPIO or audio (VRmagic GmbH, 2015).
The two camera modules (VRm-S 12/C) have a
1/3” color CMOS sensor with a resolution of 754x480
pixels and a pixel size of 6μm x 6μm. With a maximal
frame rate of 69 Hz the cameras are able to take
monochrome and color images (VRmagic GmbH,
2015).
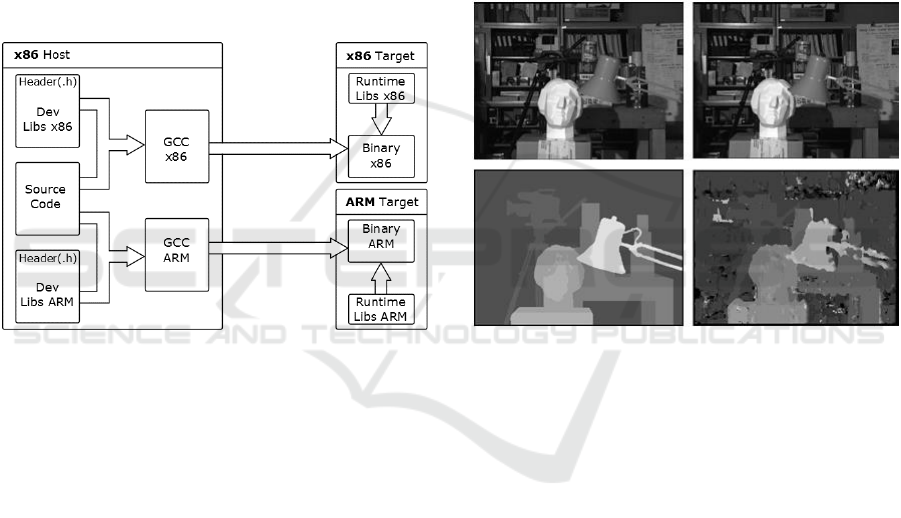
The architecture of the D3 camera is shown in Fig.
2. The DaVinci dual core platform consists of an
ARM-Cortex A8 general purpose processor and a
DSP C674x digital signal processor. Both have a
floating point unit (FPU). Communication between
these two cores is done over a 64-Bit interface, which
Figure 1: VRmagic D3 intelligent ARM/DSP camera
(EVM).
is controlled by the Texas Instruments Codec Engine.
There is also a separate interface for interrupt
requests. The ARM core is clocked with 1 GHz and
the DSP with 700 MHz respectively. Both cores can
access a shared memory of the overall 2 GB DDR3-
800 RAM which is clocked with 400 MHz. Other
areas of the partitioned RAM are used e.g. for
graphics output. The ARM-Cortex A8 runs a
customized version of Ubuntu 12.04 long term
support (LTS) with the Linux kernel 2.6.37 and
without a graphical user interface. The
communication between the ARM and DSP core is
implemented with the help of the TI Codec Engine.
The algorithm on the DSP is using the IUNIVERSAL
interface.
Figure 2: TI DaVinci DM8148 multicore architecture
(VRmagic GmbH, 2015).
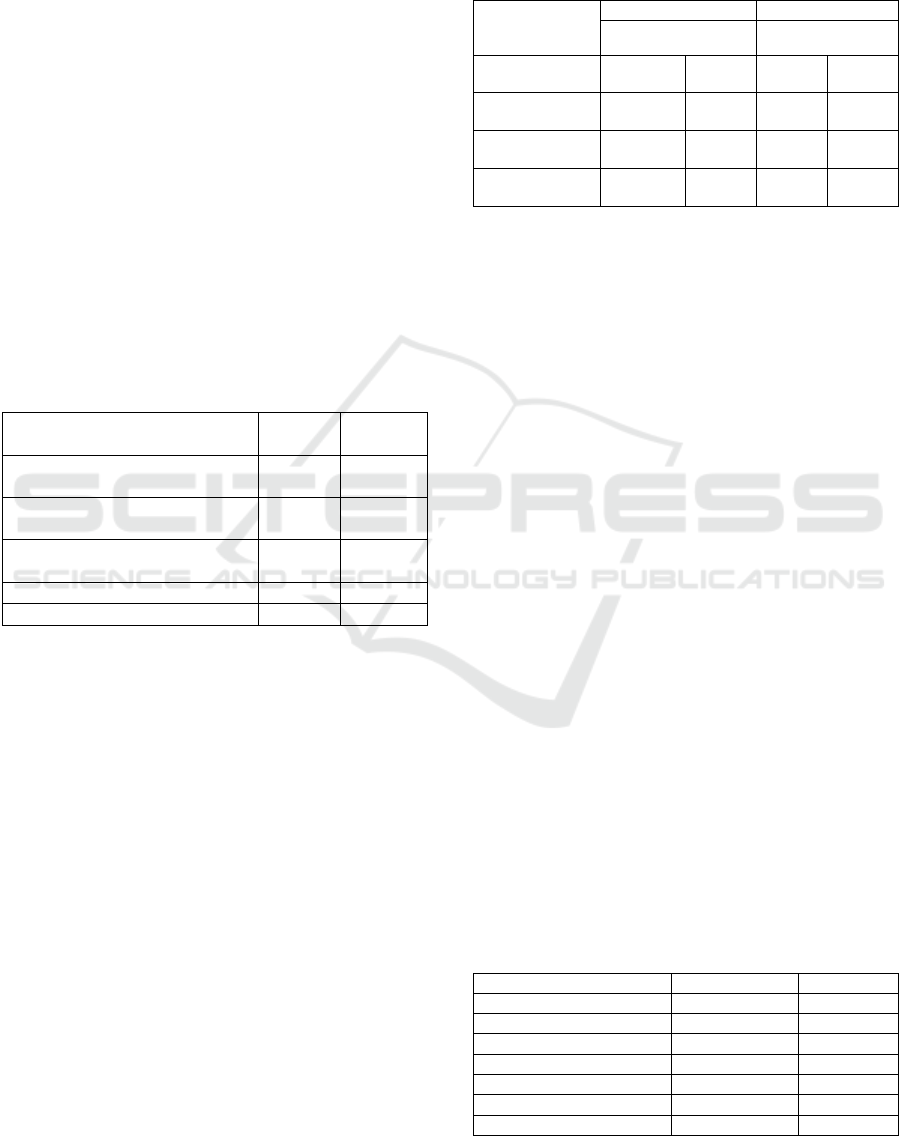
2.2 Embedded Toolchain
Fig. 3 shows an overview of the VRmagic
development system. As you can see the
implementation of the desired algorithms is done on
an x86 host computer and the binary files are
transferred to the target (VRmagic GmbH, 2015).
The target can either be an x86 or an ARM based
computer, of course the appropriate runtime libraries
are needed for both systems. The x86 host computer
runs with a custom version of Ubuntu 12.04 (LTS)
which is offered by VRmagic. To generate binary
files for the different targets the toolchain provides a
cross-compiler suite, in our case the GNU Compiler
Collection (GCC), and all required development
libraries for the different target platforms. The custom
Stereo Vision on an ARM/DSP Multicore Platform based on Code Generation using the MATLAB Embedded Coder
559
Ubuntu operating system can be installed on a
PC/Laptop or a virtual machine.
2.3 Automatic Generation of C/C++
Code
As seen above, the compiler toolchain is
homogenous. The host machine as well as the
embedded target is based on an Ubuntu distribution
with an appropriate cross-compiler for the processor.
In addition, we are able to use the same generated
code from the algorithm function, if we use the
MATLAB Coder for generic code generation. If the
MATLAB Embedded Coder is used, of course, the
code is optimized for the target processor.
Nevertheless, the homogenous toolchain is still
profitable.
Figure 3: Toolchain of the used VRmagic camera
(VRmagic GmbH, 2015).
The process of automatic code generation sounds
easy. However, there are some preliminaries which
have to be done before automatic code generation.
The MATLAB language determines the type of
variables at runtime, which is called, dynamic typing
but the variable types for a static typing language like
C/C++ has to be set at compile time and therefore this
has to be done first. It should also be checked if the
used MATLAB functions are supported by the
MATLAB code generation framework. For example
we are not using the MATLAB toolbox function for
calculating the disparity, because it does not support
ARM based processors and therefore this approach
would not be implementable on our D3 camera
system. The disparity function of MATLAB needs a
library which is only available for x86 target systems.
For this reason, we are using an own SAD
implementation for our investigations.
3 RESULTS
The regarded algorithm performs the computationally
expensive stereo matching calculation based on
rectified images. The Windows 7 host platform is
running on an Intel Core-i5 3570k@3.4 GHz. We use
the sum of absolute differences (SAD) for correlation
as in (Goldberg & Matthies, 2011). The greyscale
stereo image pair Tsukuba from the Middlebury
Dataset (Middlebury, 2015) has the size 384x288 at 8
Bit depth. The calculated disparity image has integer
precision. In Fig. 4 the stereo image pair, the true
disparities and the calculated disparity map is shown
using a SAD window size of 7x7 and a disparity range
of 16.
Figure 4: Stereo image pair (above), ground truth disparity
map (bottom left) and calculated disparities (bottom right).
To evaluate the performance of our code on the
embedded platform, we measure the elapsed time of
the implemented code with the accurate time.h Linux
Library and the system function gettimeofday()
(Ubuntu Manpage, 2015). Because of our
homogenous toolchain, i.e. the host machine and the
embedded target are based on an Ubuntu distribution,
there are no variants in code concerning the
measurement method. The elapsed time within
MATLAB is calculated with tic/toc, which gives us
adequate precision in milliseconds.
To be able to compare our results with existing
approaches, especially (Ambrosch et al., 2010),
(Goldberg & Matthies, 2011), (Humenberger et al.,
2009) and (Khaleghi et al., 2008), we calculate the
performance parameter Mde (million disparity
estimations per second) out of our measurements.
Finally, we refer these results to the rate of the
processor cycle frequency and get Mde/GHz.
As one can see in TABLE 1 the implementation
of the C-Code, generated by the MATLAB
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
560
Embedded Coder achieves a performance value of 3.7
Mde/GHz and therefore cannot compete with more
powerful desktop CPUs. This finding corresponds to
other known publications (Demirovic et al., 2014),
(Welch et al., 2012). Here, the generic (not platform
specific) C-Code of the algorithm produced by the
MATLAB Coder results in 5.8 Mde/GHz as
MATLAB mex library and 6.5 Mde/GHz in the
Ubuntu Host environment. However, our embedded
performance is comparable to and better than the
MATLAB engine itself on a Core-i5 desktop CPU
which achieves 2.8 Mde/GHz.
In the section above the performance values
belong to MATLAB Code which has been optimized
for the code generation process. In TABLE 2 the
performance improvements are shown in detail. The
variant D is used in the preceding section. All results
are calculated by averaging over up to 100
measurements.
Table 1: Comparison of the MATLAB execution time and
the embedded implementation of the final optimized
algorithm.
Platform
time/ms
Mde/G
Hz
Core-i5 3570k@3.4Ghz,
MATLAB
184
2.8
Core-i5 3570k@3.4Ghz,
MATLAB mex
89
5.8
Core-i5 3570k@3.4Ghz,
Ubuntu Host
80
6.5
ARM Cortex-A8@1GHz
476
3.7
VLIW DSP C674x@700Mhz
428
5.9
One outcome of the investigations is that the
processor specific optimization of the MATLAB
Embedded Coder which results in using the NEON
SIMD instruction set seems to be not as noticeable as
expected. In the case of the final optimization D, we
can state a speed-up of only 12%.
In code variant A the SAD matching algorithm is
based on matrix-templates that are cut out of the left
and right image. Next, for each column in the
reference image and each disparity value the absolute
difference of the matrix-templates are calculated.
Obviously, addressing all window-elements of the
sub-matrices is rather time consuming, i.e. the
calculation of the depth map requires approx. 3.6
seconds (0.5 Mde/GHz). The performance can be
significantly increased by calculating the SAD metric
successively column by column. With this
modification variant B shows a speed-up of about 3
(1.2 seconds or 1.4 Mde/GHz). Finally, the
accumulation for the SAD metric in vertical direction
can also be optimized, that results in a calculation
time of about 500 milliseconds or 3.6 Mde/GHz
(variant C,D).
Table 2: Performance optimization of the generated C-Code
for the embedded implementation.
Algorithm
time/ms
Mde/GHz
w/o
NEON
w
NEON
w/o
NEON
w
NEON
A: SAD with
sub-matrices
3625
n/a
0.5
n/a
B: SAD
column-wise
1274
1258
1.4
1.4
C: Sum up by
conv2
601
497
2.9
3.6
D: Sum up
manually
543
476
3.3
3.7
3.1 Comparison
In TABLE 3 our gathered performance parameter
Mde/GHz of our ARM implementation is compared
to given contributions that are based on different
embedded platforms, mainly on a DSP or ARM/DSP
processor. As expected, the implementation on the
ARM core of our system shows worse performance
characteristics compared to optimized DSP
implementations (Goldberg & Matthies, 2011),
(Ambrosch et al., 2010).
However, we can also compare our results to
another ARM Cortex-A8 implementation (Agadakos,
2015) that has already been optimized as stated by the
author. Our approach shows the final implementation
with the MATLAB Embedded Coder and our
optimizations for the SAD calculation which
therefore outperforms the given contribution.
Using the generated generic C-Code on the DSP
core yields to a performance increase of about 10%
compared to our ARM implementation. Although if
we compare that to other DSP implementations
(Goldberg & Matthies, 2011) and (Ambrosch et al.,
2010), we can see that the performance is still
multiple times slower than what can be achieved with
highly optimized code. Nevertheless, the scope of our
investigations was the analysis of automatically
generated code, rather than processor optimized
implementations.
Table 3: Comparison of the embedded stereo
implementations.
Author
Method
Mde/GHz
Khaleghi
3x3 Census
19.2
Humenberger
8x8 Census
78.38
Ambrosch
Sparse Census
120.23
Goldberg
7x7 SAD
280.77
Agadakos
7x7 SAD
0.58
This work (ARM, variant D)
7x7 SAD
3.7
This work (DSP, variant D)
7x7 SAD
5.9
Stereo Vision on an ARM/DSP Multicore Platform based on Code Generation using the MATLAB Embedded Coder
561

4 CONCLUSION
In this work we have illustrated the implementation
of an SAD based stereo algorithm on an embedded
ARM/DSP vision platform. The algorithm is
developed as MATLAB function code that feeds the
MATLAB Embedded Coder to generate generic or
platform-specific C-Code code, in our case using the
NEON instruction set of the ARM Cortex processor.
We have evaluated the performance of the
implemented code by comparing the speed
performance in million disparity estimations per
second in respect to the processor cycle frequency.
The main outcome of our work is the awareness
that the performance of the embedded
implementation highly depends on the developed
MATLAB function code. The MATLAB Embedded
Coder seems to generate more efficient code if the
underlying algorithm is based on vector calculations
rather than addressing sub-matrices. This could be a
drawback, because the resulting MATLAB code
could be less compact and readable.
With the described optimizations our generated
C-Code achieves a performance of 3.7 Mde/GHz and
therefore outperforms an existing ARM
implementation of this algorithm. Unfortunately, no
further ARM-only implementations of the considered
algorithm are known.
Additionally, our algorithm on the DSP shows
worse performance characteristics compared to
existing DSP implementations. We used generic C-
Code generated with the MATLAB coder which has
a major drawback because we don’t specifically take
advantage of the DSP architecture (apart from TI
compiler optimizations). Therefore future work
should investigate the possibility of optimized code
generation for the DSP with the MATLAB Embedded
Coder and the TI C6000 Hardware Support Package.
Furthermore improvements should be made to the
SAD algorithm with special emphasis on the DSP
code generation.
REFERENCES
Agadakos, Y., 2015. A Heterogenous System Approach To
The Real Time Stereo Problem. [Online] Available at:
http://artemis.library.tuc.gr/MT2013-0114/MT2013-
0114.pdf [Accessed 03 March 2015].
Ambrosch, K., Zinner, C. & Leopold, H., 2010. A miniature
embedded stereo vision system for automotive
applications. Electrical and Electronics Engineers in
Israel (IEEEI), pp.000786-89.
Demirovic, D., Serifovic Trbalic, A., Prljaca, N. & Cattin, P.
C., 2014. Evaluation of image processing algorithms an
ARM powered mobile devices. Information and
Communications Technolog, Electronics and
Microelectronics (MIPRO), pp.417-20.
Goldberg, S. B. & Matthies, L., 2011. Stereo and IMU
assisted visual odometry on an OMAP3530 for small
robots. Computer Vision and Pattern Recognition
Workshops (CVPRW), pp.169-76.
Humenberger, M., Zinner, C. & Kubinger, W., 2009.
Performance evaluation of a cencus-based stereo
matching algorithm on embedded and multi-core
hardware. Image and Signal Processing and Analysis,
pp.388-93.
Khaleghi, B., Ahuja, S. & Wu, Q., 2008. An improved real-
time miniaturized embedded stereo vision system
(MESVS-II). Computer Vision and Pattern
Recognition Workshops, pp.1-8.
Lixin, Z., Dong, Y. & Zhengguang, X., 2009. A Segment
Based Dense Stereo Matching Algorithm. Information
Science and Engineering, pp.574-78.
Manpage, U., 2015. Ubuntu Homepage. [Online] Available
at: http://manpages.ubuntu.com/manpages/lucid/
man2/gettimeofday.2.html [Accessed 03 March 2015].
Middlebury Datasets, 2015. Middlebury. [Online]
Available at: http://www.middlebury.edu/stereo
[Accessed 03 March 2015].
Mustafah, Y. M., Noor, R., Hasbi, H. & Azma, A. W., 2012.
Stereo vision images processing for real-time object
distance and size measurements. Computer and
Communication Engineering, pp.659-63.
Scharstein, D., Szeliski, R. & Zabih, R., 2001. A taxonomy
and evaluation of dense two-frame stereo
correspondance algorithms. Stereo and Multibaseline
Vision, pp.131-40.
VRmagic GmbH, 2015. VRmagic Hompage. [Online]
Available at: http://www.vrmagic.com/downloads/
imaging/protected/D3_intelligent_camera_user_guide
_150128_EN.pdf [Accessed 03 March 2015].
Welch, E., Patru, D., Saber, E. & Bengston, K., 2012. A
study of the use of SIMD instructions for two image
processing algorithms. Image Processing Workshop (
WNYIPW).
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
562
