
Parallel Implementation of Spatial Pooler in Hierarchical Temporal
Memory
Marcin Pietron
1,2
, Maciej Wielgosz
1,2
and Kazimierz Wiatr
1,2
1
AGH University of Science and Technology, Mickiewicza 30, 30-059, Cracow, Poland
2
ACK Cyfronet AGH, Nawojki 11, 30-950, Cracow, Poland
Keywords:
Artificial Intelligence, GPGPU Computing, Hierarchical Temporal Memory, Machine Learning, Neocortex.
Abstract:
Hierarchical Temporal Memory is a structure that models some of the structural and algorithmic properties of
the neocortex. HTM is a biological model based on the memory-prediction theory of brain. HTM is a method
for discovering and learning of observed input patterns and sequences, building an increasingly complex mod-
els. HTM combines and extends approaches used in sparse distributed memory, bayesian networks, spatial
and temporal clustering algorithms, using a tree-shaped hierarchy neural networks. It is quite a new model of
deep learning process, which is very efficient technique in artificial intelligence algorithms. HTM like other
deep learning models (Boltzmann machine, deep belief networks etc.) has structure which can be efficiently
processed by parallel machines. Modern multi-core processors with wide vector processing units (SSE, AVX),
GPGPU are platforms that can tremendously speed up learning, classifying or clustering algorithms based on
deep learning models (e.g. Cuda Toolkit 7.0). The current bottleneck of this new flexible artifficial intelli-
gence model is efficiency. This article focuses on parallel processing of HTM learning algorithms in parallel
hardware platforms. This work is the first one about implementation of HTM architecture and its algorithms
in hardware accelerators. The article doesn’t study quality of the algorithm.
1 INTRODUCTION
Nowadays, a huge amount of data is generated by mil-
lions of sources in the Internet domain at any given
time. It is estimated that all the data collected in 2012
from the Internet amounted to 2.7 ZB , which is a 48
% increase compared to 2011; at the end of 2013,
this number reached 4 ZB (Idc, 2011) (Hilbert and
Lopez, 2011). Furthermore, the amount of data trans-
ferred within the areas of telecommunication net-
works grows with an increase in the number of data
sources. In 2010 it was 14 EB, in 2011 - 20 EB,
in 2012 - 31 EB per month in non-mobile networks
(Cisco, 2012). There is a similar rate of growth in
the mobile infrastructure in the year 2010 - 256 PB ,
2011 - 597 PB and 2012 - 885 PB per month (Cisco,
2012). It is expected that the coming years will wit-
ness a further increase in the number of mobile de-
vices and other data sources, which will result in con-
tinued exponential growth of data generation.
Storing all the data (raw data) requires a huge
amount of disk space. In addition, with the devel-
opment of network infrastructure and increase in the
amount of available data, the demand for precise in-
formation and fast data analysis is rising. Therefore, it
can be expected that in the future, carefully extracted
information will be stored in a well-defined model
of self- adaptive architecture (Hawkins and Ahmad,
2011)(Wu et al., 2014), which will also be used for
advanced context-sensitive filtering of incoming data.
Nowadays, virtually all the companies and insti-
tutions need reliable information which should be
rapidly accessible. This is very often a decisive factor
when it comes to a company’s evolution and its sur-
vival on the market. For example, companies in the
banking sector are especially concerned about an ac-
cess to up-to-date, reliable information. Sometimes a
couple of second makes a huge difference and decides
about profit or loss which, in the long run, affects the
whole performance of the institution. Consequently,
there is a need to develop systems capable of ex-
tracting knowledge from many incoming data streams
quickly and accurately. To operate effectively, such
systems should be equipped with well-designed al-
gorithms that enable modeling of a selected area of
knowledge in real time (adding new and removing
old outdated structures) and the appropriate hardware
infrastructure allowing for fast data processing (Cai
346
Pietron, M., Wielgosz, M. and Wiatr, K.
Parallel Implementation of Spatial Pooler in Hierarchical Temporal Memory.
DOI: 10.5220/0005706603460353
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 2, pages 346-353
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
et al., 2012) (Lopes et al., 2012).
In many state-of-the-art content extraction sys-
tems, a classifier is trained, and the process demands a
large set of training vectors. The vectors are extracted
from the database and the training is performed. This
operation may be regarded as the creation of an ini-
tial model of the extracted knowledge. In order to
change the model, that process must be performed
again, which is time consuming and can not always
be performed in real time. There are different kinds
of classifiers used in the information extraction sys-
tems such as SVM, K-means, Bayesian nets, Boltz-
mann Machine etc. There are also various methods
of matrix reduction employed in order to reduce the
computational complexity and keep the quality of the
comparison results at the same high level.The most
popular and frequently used algorithms for matrix di-
mensionality reduction are PCA and SVD. Standard
implementations of those algorithms are highly itera-
tive and sequential by their nature, which means that
they require a substantial number of sequential steps
to reduce a matrix.
An alternative to the conventional methods are al-
gorithms based on sparse distributed representation
and Hierarchical Temporal Memory, which store the
contextual relationships between data rather than bare
data value, as the dense representation (Hawkins and
Ahmad, 2011). It can be thought of as a seman-
tic map of the data, so the conversion from dense to
sparse representation is a transition from a description
in words and sentences into description in semantic
maps which can be processed at the pixel level. In
the case of sparse distributed representation, every bit
has a semantic meaning. Therefore, mapping to the
sparse distributed representation is a very important
stage (Fig. 1).
12 32423 232 133
1 0 1 0 0 0 1 0 1 1 0 1 1 0 0 1 0 1 1 1 0 1
1 0 1 0 0 0 1 0 0 1 0 1 1 0 0 1 0 1 1 1 0 0
0 0 1 0 0 0 1 0 1 0 0 1 1 0 0 1 0 1 1 1 0 1
1 0 0 0 0 0 1 0 1 1 0 1 1 0 0 1 0 1 1 1 0 1
Mapping from dense to sparse distribution
12
32423
232
133
Figure 1: Dense to sparse data representation mapping.
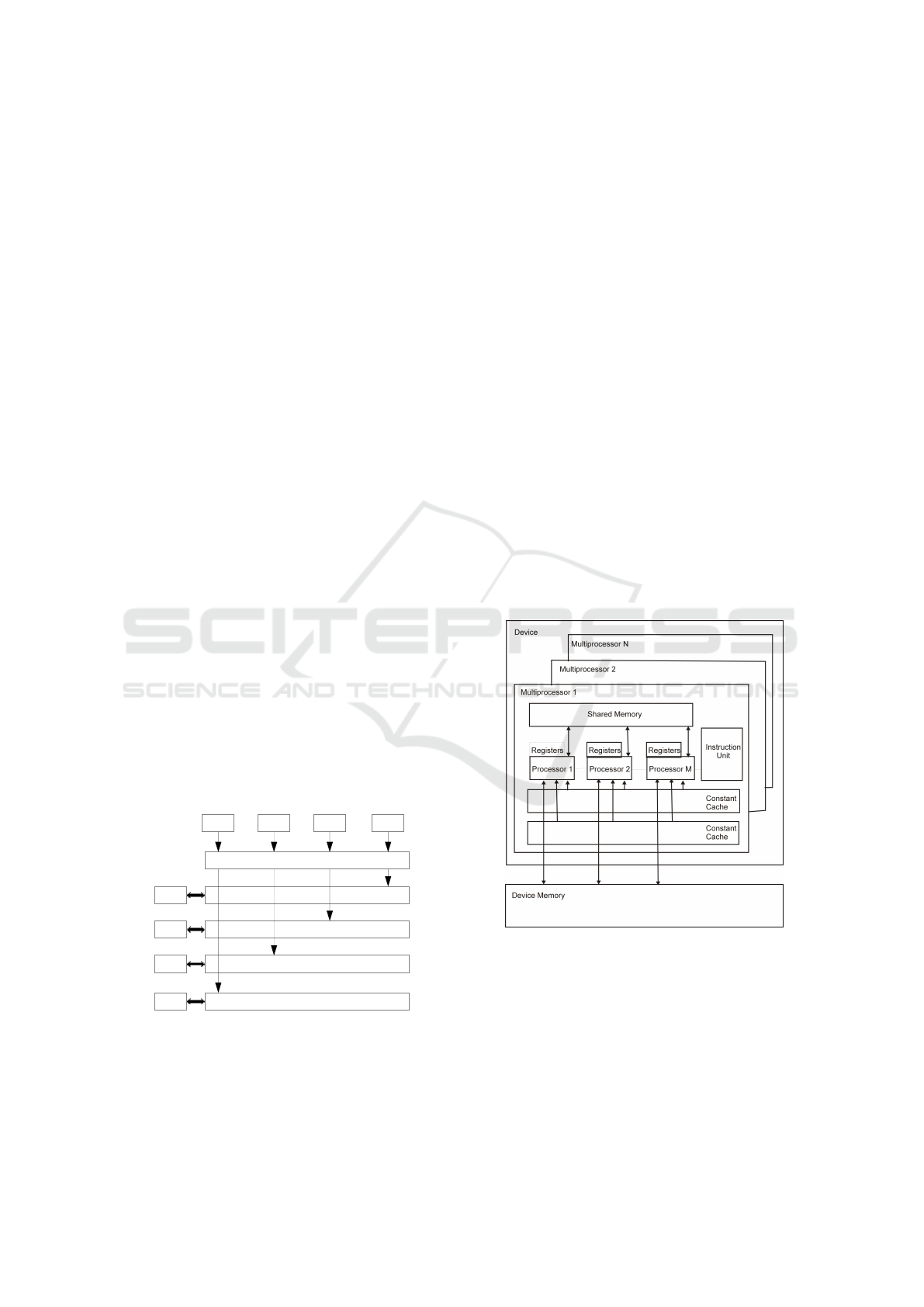
2 GPGPU AND
MULTIPROCESSOR
COMPUTING
The architecture of a GPGPU card is described in
Fig. 2. GPGPU is constructed as N multiproces-
sor structure with M cores each. The cores share an
Instruction Unit with other cores in a multiproces-
sor. Multiprocessors have dedicated memory chips
which are much faster than global memory, shared
for all multiprocessors. These memories are: read-
only constant/texture memory and shared memory.
The GPGPU cards are constructed as massive paral-
lel devices, enabling thousands of parallel threads to
run which are grouped in blocks with shared mem-
ory. A dedicated software architecture CUDA makes
possible programming GPGPU using high-level lan-
guages such as C and C++ (NVIDIA, 2014). CUDA
requires an NVIDIA GPGPU like Fermi, GeForce
8XXX/Tesla/Quadro etc. This technology provides
three key mechanisms to parallelize programs: thread
group hierarchy, shared memories, and barrier syn-
chronization. These mechanisms provide fine-grained
parallelism nested within coarse-grained task paral-
lelism.
Figure 2: GPGPU architecture.
Creating the optimized code is not trivial and thor-
ough knowledge of GPGPUs architecture is neces-
sary to do it effectively. The main aspects to con-
sider are the usage of the memories, efficient division
of code into parallel threads and thread communica-
tions. As it was mentioned earlier, constant/texture,
shared memories and local memories are specially op-
timized regarding the access time, therefore program-
mers should optimally use them to speedup access to
Parallel Implementation of Spatial Pooler in Hierarchical Temporal Memory
347

data on which an algorithm operates. Another im-
portant thing is to optimize synchronization and the
communication of the threads. The synchronization
of the threads between blocks is much slower than in
a block. If it is not necessary it should be avoided, if
necessary, it should be solved by the sequential run-
ning of multiple kernels. Another important aspect is
the fact that recursive function calls are not allowed in
CUDA kernels. Providing stack space for all the ac-
tive threads requires substantial amounts of memory.
Modern processors consist of two or more inde-
pendent central processing units. This architecture
enables multiple CPU instructions (add, move data,
branch etc.) to run at the same time. The cores
are integrated into a single integrated circuit. The
manufacturers AMD and Intel have developed several
multi-core processors (dual-core, quad-core, hexa-
core, octa-core etc.). The cores may or may not share
caches, and they may implement message passing or
shared memory inter-core communication. The sin-
gle cores in multi-core systems may implement archi-
tectures such as vector processing, SIMD, or multi-
threading. These techniques offer another aspect of
parallelization (implicit to high level languages, used
by compilers). The performance gained by the use
of a multi-core processor depends on the algorithms
used and their implementation.
There are lot of programming models and li-
braries of multi-core programming. The most pop-
ular are pthreads, OpenMP, Cilk++, TDD etc. In our
work OpenMP was used (OpenMP, 2010), being a
software platform supporting multi-threaded, shared-
memory parallel processing multi-core architectures
for C, C++ and Fortran languages. By using OpenMP,
the programmer does not need to create the threads
nor assign tasks to each thread. The programmer in-
serts directives to assist the compiler into generating
threads for the parallel processor platform.
3 HIERARCHICAL TEMPORAL
MEMORY
Hierarchical Temporal Memory (HTM) replicates the
structural and algorithmic properties of the neocortex.
It can be regarded as a memory system which is not
programmed and it is trained through exposing them
to data i.e. text. HTM is organized in the hierarchy
which reflects the nature of the world and performs
modeling by updating the hierarchy. The structure is
hierarchical in both space and time, which is the key
in natural language modeling since words and sen-
tences come in sequences which describe cause and
effect relationships between the latent objects. HTMs
may be considered similar to Bayesian Networks,
HMM and Recurrent Neural Networks, but they are
different in the way hierarchy, model of neuron and
time is organized (Hawkins and Ahmad, 2011).
At any moment in time, based on current and past
input, an HTM will assign a likelihood that given con-
cepts are present in the examined stream. The HTM’s
output constitutes a set of probabilities for each of the
learned causes. This moment-to-moment distribution
of possible concepts (causes) is denoted as a belief. If
the HTM covers a certain number of concepts it will
have the same number of variables representing those
concepts. Typically HTMs learn about many causes
and create a structure of them which reflects their re-
lationships.
Even for human beings, discovering causes is con-
sidered to be a core of perception and creativity, and
people through course of their life learn how to find
causes underlying objects in the world. In this sense
HTMs mimic human cognitive abilities and with a
long enough training, proper design and implemen-
tation, they should be able to discover causes humans
can find difficult or are unable to detect (Kapuscinski,
2010)(Sherwin and Mavris, 2009).
HTM infers concepts of new stream elements and
the result is a distribution of beliefs across all the
learned causes. If the concept (e.g. one of the cat-
egories occurring in the examined stream) is unam-
biguous, the belief distribution will be peaked other-
wise it will be flat. In HTMs it is possible to disable
learning after training and still do inference.
4 SPATIAL POOLER IN
HIERARCHICAL TEMPORAL
MEMORIES
This paper focuses on spatial pooler parallelization. It
may be summarized in the following steps:
• Starts with an input consisting of a fixed number
of bits which could be sensory data or they could
come from another region lower in the hierarchy,
• assigns a fixed number of columns in the region
this entry. Each column has an associated seg-
ment of dendrites (Hawkins and Ahmad, 2011).
Dendrite segments have potential synapses. Each
synapse has a permanence value,
• determines number of valid synapses connected to
every column,
• boosting factor is used to amplify value of
columns. It is evaluated on the base of a given
column neighbours,
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
348

• the columns which are selected by the boosting
procedure inhibit all the neighbours within the in-
hibition radius,
• all the active columns have their synapses’ per-
manence values adjusted. The ones aligned with
active inputs are increased.
The detailed implementation of the algorithm is as
follows:
• Each column is connected by a fixed number of
inputs to randomly selected node inputs. Based
on the input pattern, some columns will receive
more active input values,
• Inputs of columns (synapses) have values (float-
ing point between 0 and 1 called permanence
value) which represents possibility of activating
the synapse (if the value is greater than 0.5 and
corresponding input is 1 the synapse is active),
• Columns which have more active connected
synapses than given threshold (minOverlap) and
its overlap parameter (number of active synapses)
is better than k-th overlap of set of columns in
spectrum of inhibition radius,
• During learning process columns gather informa-
tion about their history of activity, overlap values
(if overlap was greater than minOverlap or not),
compute minimum and maximum overlap duty
cycle and then decides according to the combina-
tions of these parameters if their permanence val-
ues or inhibition radius should be changed.
Generally, spatial pooling selects a relatively con-
stant number of the most active columns and inacti-
vates (inhibits) other columns in the vicinity of the
active ones. Similar input patterns tend to activate a
stable set of columns. The classifier module based
on Spatial Pooler is realized by overlap and activation
computing on incoming input values. The rest of the
parameters are set during learning process. The func-
tionality of Spatial Pooler is similar to LVQ or Self
Organizing Maps neural models.
5 IMPLEMENTATION OF
SPATIAL POOLER IN GPGPU
This section describes GPU implementation of spa-
tial pooler. As mentioned in previous section spe-
cial data structures are needed for spatial algorithm.
Mapping these data structures to GPU memory hi-
erarchy is crucial for effective implementation. The
permanence values, column inputs connections, col-
umn activation, overlapDutyCycle, activeDutyCycle,
minimum and maximum overlapDutyCycle are col-
umn local data structures (see algorithm in section 4).
The overlap, overlapDutyCycle, activeDutyCycle, in-
put data are shared between columns. The representa-
tion of data structures is crucial in efficient algorithm
implementation. Some of the data like activation, val-
ues in overlapDutyCycle and activeDutyCycle arrays
can be represented as a single bit. The representation
width of the rest of the data depends on architecture of
spatial pooler e.g. number of inputs of each column,
ratio between number of columns and input size etc.
The size of representation of data mentioned above
were computed for our simulations as follows:
• overlap, overlap DutyCycle, active DutyCycle
values are stored as array of integers, array size
is equal to blockDim.x · nrOfColumnsPerThread,
• input values for block columns in ar-
ray of size sizeOfInputPerBlock, which
is equal to (2 · radiusO f ColumnInputs ·
blockDim.x · noO fColumnsPerT hread + 2 ·
radiusO fColumnInputs) ÷ 32 (where radiusOf-
ColumnInputs is width of input where single
column can be connected). Dividing by 32 due to
fact that each single input signal is represented by
single bit,
• activation as single bit or byte (depends on con-
figuration),
• overlap window, activation window arrays as in-
teger values with single bits inside representing if
column was overlapped or activated in last 32 pre-
vious cycles,
• minimum DutyCycle, maximum DutyCycle as ar-
rays of float values, array size is equal to nrOf-
ColumnsPerThread,
• column connections inputs indexes as byte ar-
rays (size equal to nrOfColumnsPerThread ·
noColInputs), permanence values as float arrays
(nrOfColumnsPerThread · noColInputs)
• positions of central indexes column inputs store in
integer arrays of size nrOfColumnsPerThread.
The Tesla M2090 has 48kB of shared memory per
each block and 32kB register memory which can be
divided between block threads. In our work three dif-
ferent configurations were implemented (each config-
uration run with 64 threads per block):
• thread processing one column with majority of
local column data (column data not shared be-
tween other columns) stored in registers (minor-
ity in local thread memory), radiusOfColumnIn-
puts is 128, each column has 32 input connec-
tions, where all local column data stored in regis-
ters, shared data in block shared memory, the size
Parallel Implementation of Spatial Pooler in Hierarchical Temporal Memory
349
of data in local thread memory is: (32 + 32 · 4),
the data in registers: 6 · 4 + 1 as six four bytes val-
ues are stored and one byte for activation, the size
of data in shared memory is (3 · 4 · blockDim.x +
sizeO f InputPerBlock), which is equal in our case
(12 · 64 + (2 · 32 ·64 + 2 ·32) ÷ 32) (figure 3),
• thread processing eight columns with local col-
umn data stored in local memory and registers,
radiusOfColumnInputs is 128, each column has
32 input connections, shared data of size (3 ·
4 · blockDim + sizeO f InputPerBlock) in shared
memory, the size of data in thread local memory
is: 5 · 4 · 8 + 8 · 32 · (1 + 4), the data in registers:
1 + 4, the size of data in shared memory is the
same as in previous configuration (figure 4),
• thread processing eight columns with shared data
filled as much as possible, only column inputs in-
dexes, their permanence values are stored in lo-
cal memory, the size of data in local memory is:
8 · 32 · (1 + 4), the data in registers: 1 + 4, the
size of data in shared memory is sum of (3 · 4 ·
blockDim + sizeO f InputPerBlock) and 5 · 4 · 8.
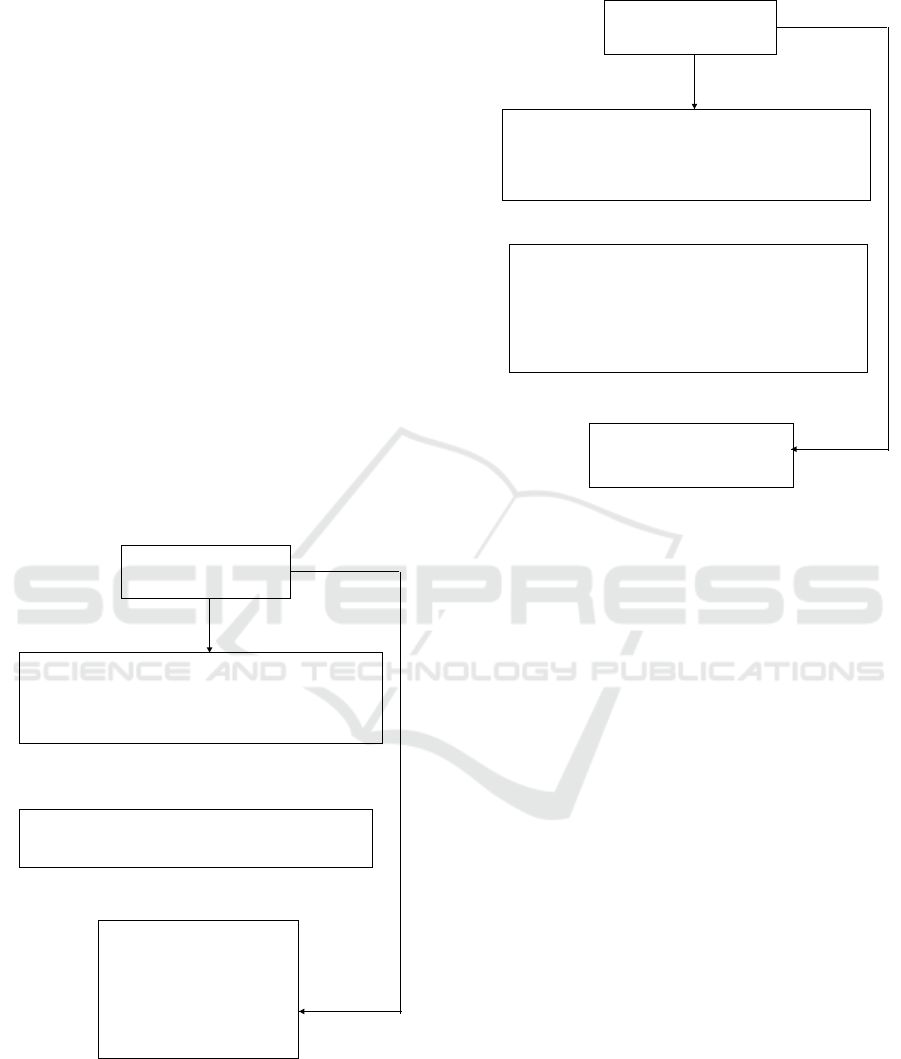
Registers
Local Memory L1/L2
Global Memory
Shared Memory
curand states[]
int inputs[]
int overlapTab[blockDim.x]
int overlapDutyCycle[blockDim.x]
int inputShared[sizeOfInputPerBlock]
int activeDutyCycle[blockDim.x]
byte cInputs[noColInputs]
float pValues[noColInputs]
byte Activation
curandState cState
int overlapWindow
int activationWindow
float minDutyCycle
float maxDutyCycle
int pos
Figure 3: HTM architecture in GPU for 1 column processed
by thread.
Random seed generator is stored always in reg-
isters. The main goal is to parameterized spatial
pooler that as much as possible local column data
fit available registers and local memory for single
Registers
Local Memory L1/L2
Global Memory
Shared Memory
curand states[]
int inputs[]
int overlapTab[blockDim.x*nrOfColumnsPerThread]
int overlapDutyCycle[blockDim.x*nrOfColumnsPerThread]
int inputShared[sizeOfInputPerBlock]
int activeDutyCycle[blockDim.x*nrOfColumnsPerThread]
int overlapWindow[ ]
int activationWindow[
nrOfColumnsPerThread
nrOfColumnsPerThread]
float minDutyCycle[nrOfColumnsPerThread]
float maxDutyCycle[nrOfColumnsPerThread]
byte cInputs[nrOfColumnsPerThread*noColInputs]
float pValues[nrOfColumnsPerThread*noColInputs]
int pos[nrOfColumnsPerThread]
byte Activation
curandState cState
Figure 4: HTM architecture in GPU for 8 columns pro-
cessed by thread.
block thread. The shared data should fit shared block
memory. The shared data should be allocated in
such manner that avoids bank conflicts (threads sin-
gle intruction should read or write data from differ-
ent banks). The input data stored in shared mem-
ory is the only one array with random access patterns
and there is no way to avoid bank conflicts while its
reading. The input signals represented by bits sig-
nificantly decrease memory requirements. The algo-
rithm in GPGPU firstly initializes by seperate ker-
nel initialize curand random generator and stores the
seeds in global memory. Then HTM kernel reads in
coalesced manner input values and seed from global
memory and stores them in shared memory and regis-
ters, respectively. After that initializing column pro-
cess is executed (random starting permanence values
and connection indexes are generated and stored in
local memory, figure 4 and figure 3). Then whole
learning algorithm is executed (cycles of computing
overlap, activation, permanence values updated, du-
tyCycle functions) on data stored in GPU memories.
The columns processed by boundary threads (first
thread and thread with blockDim.x-1 indexes) are pro-
cessed with limited data because of the lack of values
of all columns parameters in spectrum of inhibition
radius (boundary effects due to shared and local mem-
ory parameters storing). In case of statistical algo-
rithm like HTM spatial pooler this effect does not has
negative influence on algorithm quality. Advantage
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
350
of storing data in shared memory during execution
of whole algorithm is lack of global synchronization
between blocks which in case of GPU is time con-
suming. The global synchronization can be solved by
multi kernel invocation but it needs additional global
store and write operations which significantly drops
the efficiency. As was mentioned in previous section
the classifier module is realized by just implemented
overlap and activation functions. The input data is
transferred from global memory (sizeOfInputShared
for each block) in each cycle of classifying process.
6 IMPLEMENTATION OF
SPATIAL POOLER IN OPENMP
As was mentioned in section 3, programmer by
inserting openmp directives in appropriate places let
compiler to parallelize the code. The spatial pooler
algorithm can be divided to four main sections: col-
umn overlap computing, column activity checking,
permanence values updates and DutyCycles param-
eter computation (Hawkins and Ahmad, 2011). All
these sections are inside while loop are responsible
for learning cycles processing. The iterations of
while loop are dependent. All sections mentioned
above apart from while loop can be fully parallelized.
Therefore omp parallel for directive was used. After
each section a thread barrier is automatically inserted.
The pseudocode of openmp implementation is as
follows:
while (cycle < nr_cycle) {
#pragma omp parallel for
for (nr = 0; nr < nrOfColums; nr++) {
overlapTab[nr]=overlap(nr)
}
#pragma omp parallel for
for (nr = 0; nr < nrofColumns; nr++) {
activation[nr]=checkActivation(nr)
}
#pragma omp parallel for
for (nr = 0; nr < nrOfColumns; nr++) {
if (activation[nr] == 1)
permValueUpdate(nr)
}
#pragma omp parallel for
for (nr=0; nr < nrOfColumns; nr++) {
activeDutyCycle[nr] = \
computeActiveDutyCycle(nr)
maxDutyCycle = computeMaxDutyCycle()
minDutyCycle = computeMinDutyCycle()
overlapDutyCycle[nr] = \
overlapDutyCycle(nr)
}
cycle++
}
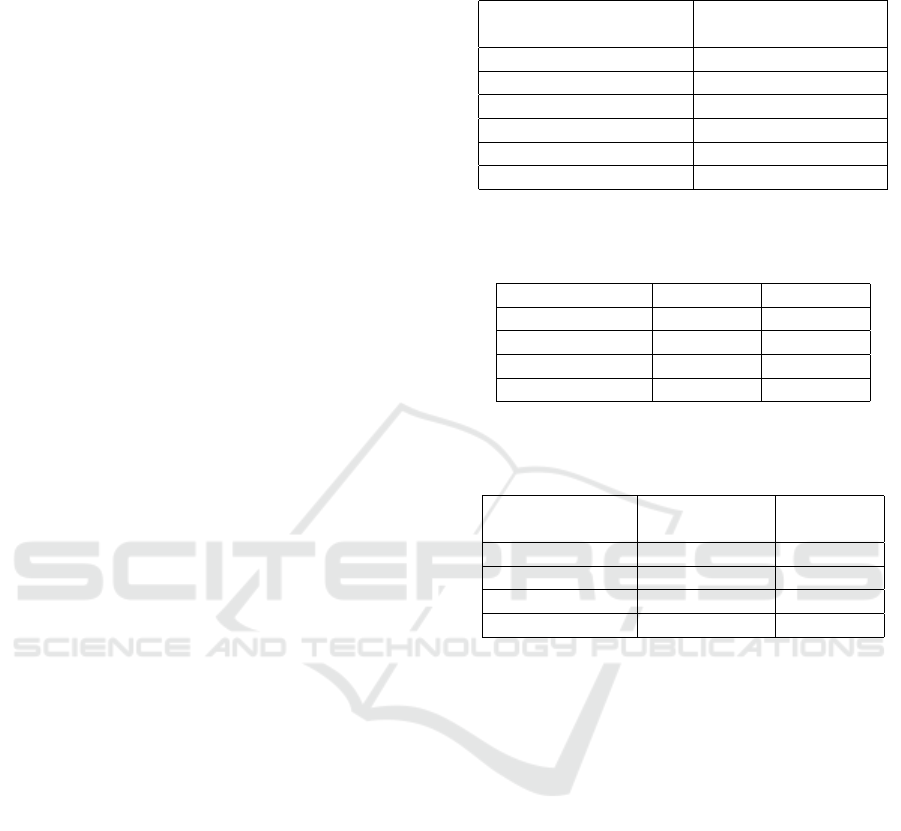
Table 1: Profiling of spatial pooler learning algorithm in
CPU.
Method percentage of whole
algorithm execution
column initialization 2.5
overlap 28.4
activation 38.7
permance values update 5
activeDutyCycle 8.5
overlapDutyCycle 9
Table 2: Profiling of spatial pooler learning algorithm
in CPU for overlap and activation (noO fColumns ×
noO fColInputs × inhibitationRadius).
Configuration overlap activation
8192 × 32 × 32 28.4 38.7
8192 × 32 × 64 20.5 52.4
4096 × 64 × 32 37 29.6
16384 × 16 × 32 25.9 34.4
Table 3: Profiling of spatial pooler learning algo-
rithm in CPU for permanence update and total time
(noO fColumns × noO f ColInputs × inhibitationRadius).
Configuration permanence
update
total time
(ms)
8192 × 32 × 32 5 397
8192 × 32 × 64 2 570
4096 × 64 × 32 5.5 270
16384 × 16 × 32 4.2 593
7 EXPERIMENTAL RESULTS
Tables 1, 2 and 3 present results of profiling learn-
ing algorithm of spatial pooler. It is worth noting that
execution time varies significantly across code sec-
tions. Activation computing is almost the most com-
putationally exhaustive. However, the proportions
may change for different set-up parameters. This ap-
plies in particular to the overlap computation since it
is the second most computationally demanding sec-
tion. The rest of the functions like minOverlapDu-
tyCycle, maxDutyCycle, boost and inhibitionRadius
update are omitted in tables because their contribu-
tion in whole time is negligible. As profiled data and
time of execution of learning algorithm is known it
is possible to estimate efficiency of pattern classifier
based on Spatial Pooler (see section 4).
Then experimental tests of learning spatial pooler
algorithm were run. Results were measured with
different parameters. Tables 4 and 5 describe re-
sults gained in Python (1 core CPU, like in NuPic
(Numenta, 2011)), GPU, single and multicore CPU
Parallel Implementation of Spatial Pooler in Hierarchical Temporal Memory
351
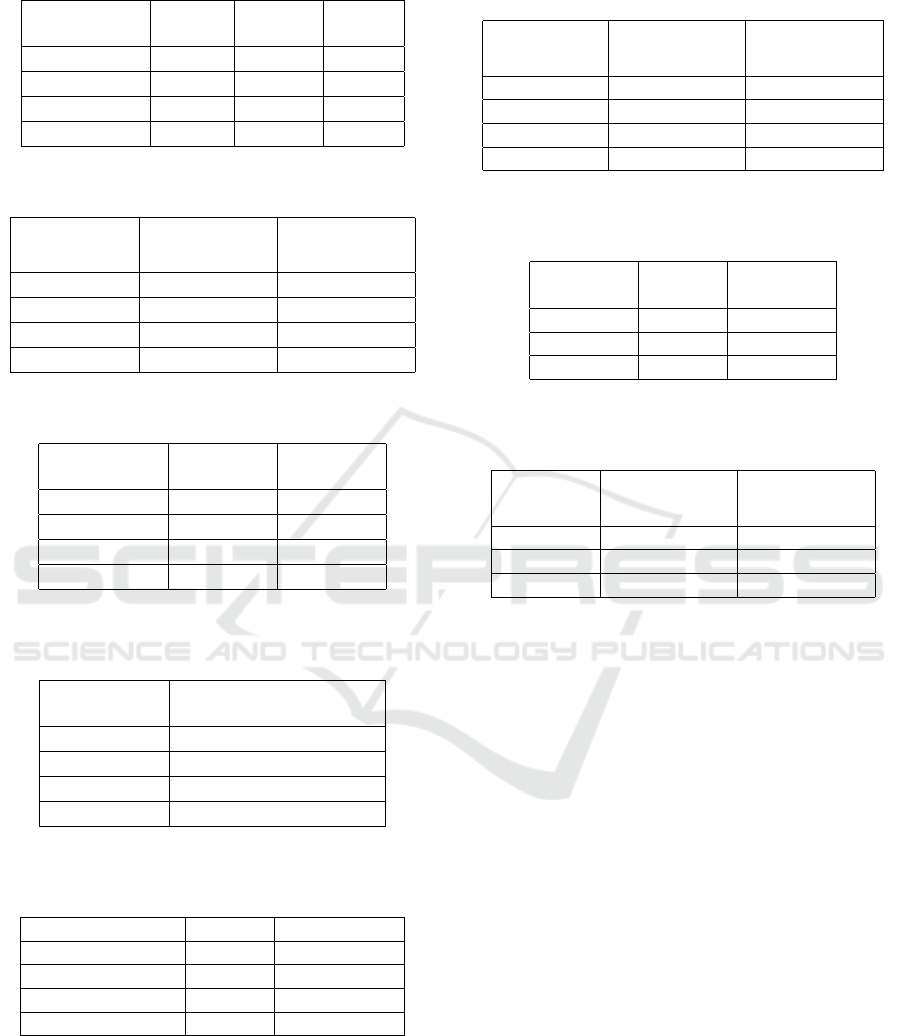
Table 4: Execution times of 100 cycles learning algorithm
in SP on CPU (1 core) and GPU (miliseconds).
Input size
(no.columns)
Python
1 core
GPGPU C/C++
1 core
2
23
(2
17
) 855190 31.4 21019
2
22
(2
16
) 413310 15.0 10250
2
21
(2
15
) 205400 8.4 4100
2
20
(2
14
) 103270 5.5 2590
Table 5: Execution times of 100 cycles learning algorithm
in SP on CPU with vectorized version (miliseconds).
Input size
(no.columns)
CPU (1 core)
(vectorized)
CPU (6 cores)
(vectorized)
2
23
(2
17
) 5160 1419
2
22
(2
16
) 2555 692
2
21
(2
15
) 1255 361
2
20
(2
14
) 613 178
Table 6: Execution times of 100 cycles learning algorithm
in SP in two different GPU configurations (miliseconds).
Input size
(no.columns)
1 column
per thread
8 columns
per thread
2
23
(2
17
) 154.2 31.4
2
22
(2
16
) 69.9 15.0
2
21
(2
15
) 33 8.4
2
20
(2
14
) 16.32 5.5
Table 7: Execution times of 100 cycles learning algorithm
in SP in full shared memory GPU configuration (milisec-
onds).
Input size
(no.columns)
1 column full shared
memory
2
23
(2
17
) 267.2
2
22
(2
16
) 126.4
2
21
(2
15
) 61.6
2
20
(2
14
) 30.9
Table 8: Execution times of SP for different number of cy-
cles, number of inputs: 524288, number of columns: 8192
(miliseconds).
Number of cycles GPGPU CPU (1 core)
20 2.9 300
40 4.3 555
70 5.7 900
100 6.88 1300
(C implementation). The python implementation is
highly inefficient, more than 50-1000 times slower
than others (from not vectorized CPU to GPU imple-
mentation). The speedups in case of CPU are close
to linear. The GPU implementation is significantly
faster than in multicore CPU (up to 40-50 times).
Table 9: Execution times of SP for different number of cy-
cles, number of inputs: 524288, number of columns: 8192
(miliseconds).
Number of
cycles
CPU (1 core)
(vectorized)
CPU (6 cores)
(vectorized)
20 72 24
40 113 41
70 196 69
100 325 100
Table 10: Execution times of SP for different inhibition ra-
dius values, number of inputs: 524288, number of columns:
8192 (miliseconds).
Inhibition
radius
GPGPU CPU
(1 core)
16 6.2 960
32 6.88 1300
64 7.6 2000
Table 11: Execution times of SP for different inhibition ra-
dius values, number of inputs: 524288, number of columns:
8192 (miliseconds).
Inhibition
radius
CPU (1 core)
(vectorized)
CPU (6 cores)
(vectorized)
16 261 66
32 325 100
64 444 147
Tables 6 and 7 depict results in case of three dif-
ferrent GPU spatial pooler configurations. The last
four tables 8, 9, 10, 11 show times of execution in
case of different number of learning cycles and in-
hibition radius value (the one column processed per
thread version is described in these tables).
Inhibition radius chance has major impact of com-
putations in case of CPU and should be taken into ac-
count when the overall execution time is considered,
Tab. 6. The simulations were run on NIVDIA Tesla
M2090 and Intel Xeon 4565 2.7Ghz. All results pre-
sented in tables are average values collected in five
measure probes (standard deviation less than 10% of
average values).
8 CONCLUSIONS
Our research shows that high level implementation of
HTM in object languages is highly inefficient. The C
language code run in parallel hardware platform gives
significant speedup. It was observed that in case of
vectorized and multicore implementation speed up is
close to linear. The GPGPU outperforms 6-core CPU.
It is worth to say that results measured on CPU with
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
352

more cores should be compared with GPU. Therefore
performance tests of Spatial Pooler on Xeon Phi will
be provided. Our work shows that HTM in hard-
ware accelerators can be used in real-time applica-
tions. Further research, will concentrate on parallel
GPU and multicore Temporal Pooler implementation.
Additionaly, adaption of C source code to OpenCL
should be done to test in other platforms like FPGA
and other heterogenous platforms (Vyas and Zaveri,
2013). At the end comparative studies of efficiency
and learning quality should be done among other par-
allel deep learning models.
ACKNOWLEDGEMENTS
This research is supported by the European Regional
Development Program no. POIG.02.03.00-12-137/13
PL-Grid Core.
REFERENCES
Cai, X., Xu, Z., Lai, G., Wu, C., and Lin, X. (2012). Gpu-
accelerated restricted boltzmann machine for collab-
orative filtering. ICA3PP’12 Proceedings of the 12th
international conference on Algorithms and Architec-
tures for Parallel Processing - Volume Part I, pages
303–316.
Cisco (2012). Visual networking index. Visual Networking
Index, Cisco Systems.
Hawkins, J. and Ahmad, S. (2011). Numenta, white pa-
per. Numenta, Hierachical Temporal Memory, white
paper, version 0.2.1, september 12, 2011.
Hilbert, M. and Lopez, P. (2011). The worlds technological
capacity to store, communicate, and compute infor-
mation. In University of Vermont, Vol. 332, no. 6025,
pages 60–65.
Idc (2011). Idc predicts. IDC Predicts 2012 Will Be the
Year of Mobile and Cloud Platform Wars as IT Ven-
dors Vie for Leadership While the Industry Redefines
Itself. IDC. 2011-12-01.
Kapuscinski, T. (2010). Using hierarchical temporal mem-
ory for vision-based hand shape recognition under
large variations in hands rotation. 10th Interna-
tional Conference, ICAISC 2010, Zakopane, Poland,
in Artifical Intelligence and Soft Computing, Springer-
Verlag, pages 272–279.
Lopes, N., Ribeiro, B., and Goncalves, J. (2012). Re-
stricted boltzmann machines and deep belief networks
on multi-core processors. Neural Networks (IJCNN),
The 2012 International Joint Conference on, pages 1–
7.
Numenta (2011). Nupic application.
https://github.com/numenta/nupic/wiki.
NVIDIA (2014). Cuda framework.
https://developer.nvidia.com/cuda-gpus.
OpenMP (2010). Openmp library. http://www.openmp.org.
Sherwin, J. and Mavris, D. (2009). Hierarchical tempo-
ral memory algorithms for understanding asymmet-
ric warfare. Aerospace conference, 2009 IEEE, MT,
pages 1–10.
Vyas, P. and Zaveri, M. (2013). Verilog implementation of
a node of hierarchical temporal memory. Asian Jour-
nal of Computer Science and Information Technology,
AJCSIT, 3:103–108.
Wu, X., Zhu, X., Wu, G.-Q., and Ding, W. (2014). Data
mining with big data. Knowledge and Data Engineer-
ing, IEEE Transactions on, 26(1):97–107.
Parallel Implementation of Spatial Pooler in Hierarchical Temporal Memory
353
