
Motion based Segmentation for Robot Vision using Adapted
EM Algorithm
Wei Zhao and Nico Roos
Department of Knowledge Engineering, Maastricht University, Maastricht, The Netherlands
Keywords:
Optical Flow, SIFT Matching, Clustering, Motion Segmentation.
Abstract:
Robots operate in a dynamic world in which objects are often moving. The movement of objects may help
the robot to segment the objects from the background. The result of the segmentation can subsequently be
used to identify the objects. This paper investigates the possibility of segmenting objects of interest from the
background for the purpose of identification based on motion. It focusses on two approaches to represent the
movements: one based on optical flow estimation and the other based on the SIFT-features. The segmentation
is based on the expectation-maximization algorithm. A support vector machine, which classifies the segmented
objects, is used to evaluate the result of the segmentation.
1 INTRODUCTION
Studies of visual perception show that human vision
is based on seeing changes (Martinez-Conde et al.,
2004). In the domain of robot vision, seeing changes
also crucial because of the environments are mostly
dynamic: robots operate in a dynamically chang-
ing world and they may have the capability to move
around. We will investigate applicability of detecting
changes in robot vision in this paper.
Analysing the changes among the frames can give
us a clue of objects in the video (Karasulu and Ko-
rukoglu, 2013; Zappella et al., 2008). This is called
the moving object detection, which is differs from the
objects detection in single image. Detecting an object
in single image requires knowledge about object’s ex-
pressions.
In this paper, a general system is investigated to
detect and recognize the objects by their movements.
We assume that one object consists of a group of
points, and points belong to the same object will have
the same movement. The system consists of three
main steps. Firstly, we detect all points and their
movements in the video sequences, where two meth-
ods are investigated. One uses optical flow to estimate
the motions of all pixels of an image. The other uses
higher level features, e.g. the scale-invariant feature
transform (or SIFT) points. Secondly, the points are
segmented into different groups based on their move-
ments and scales. These groups of points are possible
objects. Segmentation of these points based on their
movement is fulfilled by combining the EM algorithm
with a divisive hierarchical approach. Finally, a sup-
port vector machine (SVM) (Boser et al., 1992) is
used to evaluate the whether the segmentation results
can be recognized accurately as an object.
In the next section, we will briefly review some re-
lated work. Section 3, provides some background in-
formation about the algorithms that we have applied.
Section 4 outlines our approach. Experiments that we
used to evaluate our approach are presented in Section
5. Section 6 concludes the paper.
2 RELATED WORK
Detecting objects from images is multi-purpose tasks,
where many techniques, such as images segmenta-
tion, image processing, machine learning, linear al-
gebra, statistic, etc., are involved in.
Much research has already been done in the area
of image segmentation. A high level division of the
available techniques are: detecting discontinuities and
detecting similarities (Narkhede, 2013). The first cat-
egory uses edge detection to identify regional bound-
aries (Narkhede, 2013). The second category consists
of techniques such as: thresholding, clustering, mo-
tion segmentation and color segmentation (Seerha and
Rajneet, 2013; Narkhede, 2013).
In this paper we focus on motion segmentation.
Motion segmentation using optical flow and k-means
Zhao, W. and Roos, N.
Motion based Segmentation for Robot Vision using Adapted EM Algorithm.
DOI: 10.5220/0005721606490656
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 651-658
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
651

clustering has been proposed by (Wang and Adelson,
1994). Borshukov et al. (Borshukov et al., 1997) im-
proved this method by replacing the k-means cluster-
ing with a multistage merging step clustering. Opti-
cal flow estimation in combination with the EM algo-
rithm for the purpose of image stabilization has been
proposed by (Pan and Ngo, 2005).
(Shi and Malik, 1998) proposed a motion segmen-
tation algorithm that constructs a weighted spatio-
temporal graph on image sequence and using normal
cuts to find the most salient partitions of the spatio-
temporal graph. (Weiss, 1997) presented an algorithm
that segments the image sequences by fitting the mul-
tiple smooth flow fields to the spatio-temporal data
using a variant of the EM algorithm.
We make use of the basic principles of the men-
tioned approaches: detecting the motion fields and
segmenting them into clusters using EM algorithm.
But our work differs from previous work in several
ways. First, the objects need not to be cut perfectly,
just sufficiently consistent to enable object identifica-
tion. Secondly, the descriptions of clusters are simple
and improved gradually.
3 PRELIMINARIES
The approach proposed in this paper makes use of
optical flow estimation (OFE), scale-invariant fea-
ture transform (SIFT), the expectation-maximization
(EM) algorithm and the support vector machine
(SVM). In this section we briefly review each of these
approaches.
3.1 Optical Flow Estimation
Optical flow estimation is defined as the distribution
of apparent velocities of movement of brightness pat-
terns in an image (Horn and Schunck, 1981). The
optical flow Estimation is based on the assumption
that the intensity of a pixel corresponding with a point
on an object, does not change when the object or the
camera is moving. Suppose the location of a point is
(x, y) at time t and (x + ∆x, y + ∆y) at time t + ∆t. Let
I(x, y, t) be the intensity of a pixel w.r.t position (x, y)
and time t. Based on the assumption of brightness
constancy, i.e.,
I(x + ∆x, y + ∆y,t +∆t) = I(x, y,t) (1)
Expanding the equation with first-order Taylor series,
and using the notation (u, v) = (
dx
dt
,
dy
dt
), we get:
∇I(x, y,t) · (u, v, 1)
T
= 0 (2)
Lucas and Kanade(Lucas et al., 1981) proposed an
additional assumption that the that neighboring pix-
els often have the same movement. Given the set
of neighbouring points, the optical flow of centroid
points of the neighbourhood is able to estimated by
solving the optimized problem of Equation 2 over
these neighbouring points.
3.2 Scale-Invariant Feature Transform
SIFT is an algorithm to detect and describe local fea-
tures in images, which was proposed by David Lowe
(Lowe, 1999). Unlike the optical flow, SIFT is not
a technique for detecting changes. SIFT feature de-
scriptors are some keypoints extracted from a set of
reference images. They are invariant to image scaling
and rotation, and partially invariant to affine distor-
tion, noise and illumination changes. Because of the
scale-invariant properties and the high level feature
expression, the movement of segments in the image
can be estimated by matching the keypoints between
two successive images.
3.3 Expectation-Maximization
Algorithm
Both OFE and SIFT can provide motion vectors of
point in an image. We assume that points belonging to
one object have motion vectors that can be described
by an affine transformation. To extract the object
from the background, clustering methods are needed
to cluster points of these objects. It is also a segmen-
tation task, which aims to segment the image into ob-
jects and background based on the motion features
of pixels or points. The Expectation-Maximization
(EM) algorithm is one of the approaches enables us
to do this.
The EM algorithm (Dempster et al., 1977) is an
effective and popular technique for estimating pa-
rameters of a distribution from a given data set. It
aims at determining the most likely values of param-
eters θ using observed data x and some hidden vari-
ables Z. That is, the most likely parameters θ max-
imizes the expected expected value of the likelihood
L(θ;x, Z) = P(x, Z | θ) over all hidden variables Z, so,
θ = argmax
θ
0
L(θ
0
;x)
where: L(θ;x) = P(x | θ) =
∑
Z
P(x, Z | θ)
(3)
Equation 3 is a fixed point equation. Given the pa-
rameters θ and x we can determine the probability dis-
tribution of the hidden variables Z, and subsequently
we can find a maximum likelihood estimate of the pa-
rameters θ. The former is called the expectation step
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
652
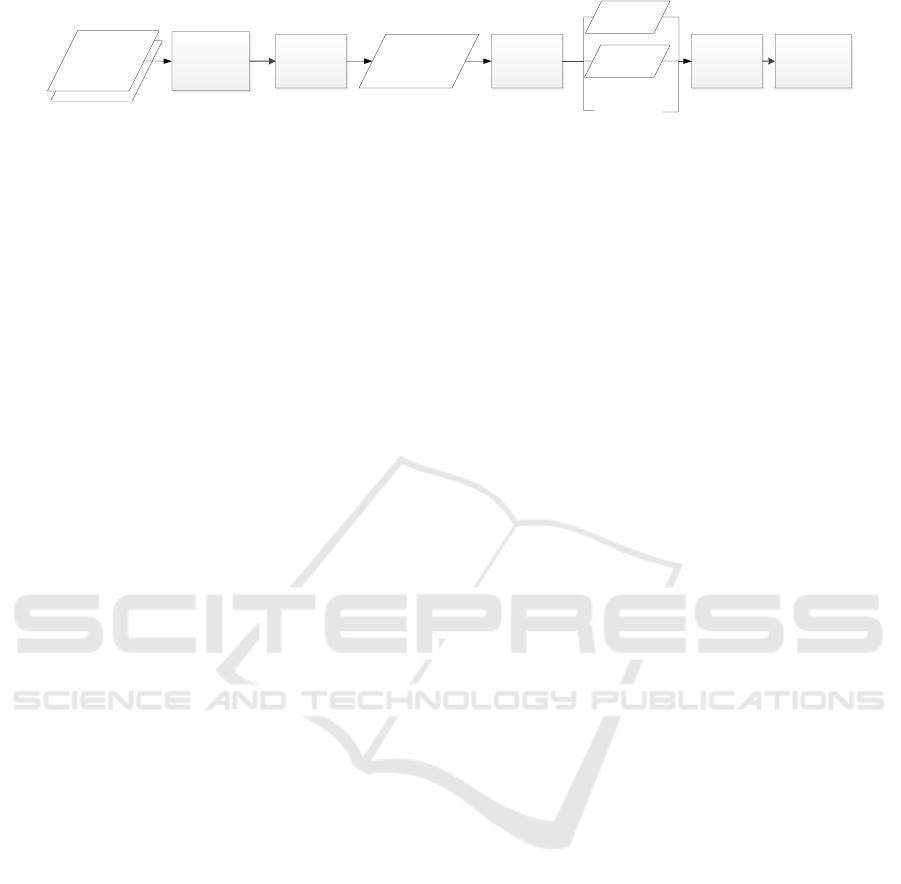
Motion
Estimation
EM
clustering
Filtering
SVM
classifer
Recognition
results
Image
sequence
Object
1
Object
2
...
Segmented
images
Figure 1: Basic architecture of the detection and recognition approach.
while the latter is called the maximization step. Start-
ing from an initial estimate of θ or P(x, Z | θ) and re-
peatedly applying the expectation and maximization
step, the EM algorithm will converge to the maximum
likelihood parameters θ.
Instead of the probability distribution P(x, Z | θ)
we may determine:
z = argmax
Z
P(x, Z | θ) (4)
in the expectation step. In the maximization step we
determine:
θ = argmax
θ
0
L(θ
0
;x, z) (5)
4 MOTION-BASED VISION
Although this paper focusses on segmentation, the fi-
nal goal is the identification of objects a robot is see-
ing in the world. The results of the segmentation
should be evaluated with respect to this goal. There-
fore we will present the whole architecture (Figure 1)
of the vision system, including the classification of
observed objects.
4.1 Optical Flow based Motion
Detection
The optical flow is calculated by using the iterative
Lucas-Kanade method with pyramids in this system
(Bouguet, 2001). The pyramid optical flow estima-
tion allows a high accuracy when the displacements
are not too large. However, optical flow estimation
often fails to estimate the large displacement due to
the constant brightness assumption.
The optical flow computes the displacement of ev-
ery pixels, so the pixels are selected as points. To
improve the computational efficiency, we resized the
images to the resolution of 120*160.
4.2 SIFT based Motion Detection
To deal with large movements, we adopt the scale-
invariant feature transform (SIFT) to detect the scale-
invariant features. The movements of SIFT features
can be identified by matching the corresponding fea-
tures of two frames (Lowe, 2004).
The SIFT algorithm first detects the location of the
keypoints in two frames separately, then compute the
SIFT descriptor for each keypoint, which is a 128 di-
mensional feature vector (Lowe, 1999). Keypoints
between two images can be matched by using the
nearest-neighbours approach. The Euclidean distance
between two SIFT feature vectors is used to evaluate
the similarity of vectors. A SIFT feature vector D
1
is matched to a SIFT feature D
2
only if the distance
satisfy the following two conditions:
• The distance is smaller than some threshold.
• The distance is not greater than the distance of D
1
to all other descriptors.
For the first condition, the ratios between the distance
of the nearest neighbor and the second nearest neigh-
bour are calculated. According to Lowe’s research
(Lowe, 2004), the matches are accepted in which the
distance ratio is smaller than 0.8, which will result in a
highest accuracy of matching. However, the matched
results may still include some incorrect matches due
to the imprecision of the SIFT model. RANSAC (Fis-
chler and Bolles, 1981) is used to refine the matching
by filtering out the “bad” matches.
A pair of matched vectors denotes the geometric
information of the same keypoint in two different im-
ages. The movement vector of such keypoint can be
obtained by computing the displacement of the coor-
dinates. We can generate a flow field by computing
the movement vectors for all matched keypoints.
4.3 Parametric Motion Model of
Moving Object
Both the optical flow and SIFT matching can produce
a set of movement vectors to denote the geometric
transformations of relevant points. The movement of
one object can be a combination of a translation, a ro-
tation and a scaling. In other words, an affine transfor-
mation (AF) can be used to denote the movement of
an object. Assuming that objects will not change their
shapes, i.e. the same object looks almost the same in
all frames of the sequence, we assume that the dis-
placement of all points in this object will satisfy the
affine transformation.
Motion based Segmentation for Robot Vision using Adapted EM Algorithm
653

Let x = (x, y)
T
the position of one point in a frame,
and let x
0
= (x
0
, y
0
)
T
be the position of corresponding
point in the next frame. This pair (x, x
0
) indicates the
movement of one point between 2 frames. Then
x
0
= Ax + b;
(6)
where A =
a
11
a
12
a
21
a
22
, b =
b
1
b
2
.
The six affine transformation parameters of (A, b)
form the parametric motion model of the object.
4.4 Motion based Segmentation
Motion-based segmentation aims to group together
the points with the same movement. Since points be-
longing one object will have the same movement, we
may use the movement to identify the points that be-
long to one object. An affine model with six parame-
ters is used to indicate the movement of an object. We
use modified EM algorithm with a recursive division
strategy to determine the clusters of points; i.e., the
segmentations.
Algorithm 1 gives the main steps of the EM based
segmentation algorithm. Each group of points in this
algorithm indicates an object.
Algorithm 1: EM-based segmentation algorithm.
Set the number of objects to 1;
Put all points into one group;
repeat
repeat
Calculate the parameters (A, b) of the affine
transformation of each group of points (see
Equation 7);
Reassign each point to a group (determine the
value of variable z) based on the error of the
point w.r.t. each group;
until convergence
if the group with the largest errors given the
group parameters (A, b) exceeds the threshold
then
Split the group with the largest errors;
Increase the number of objects by 1;
end if
until no group can be find to split, or a maximum
number of iterarions reached.
There are four key components in this algorithm,
• How to determine the parameters (A, b) of the
affine transformation?
• How to determine the best assignment of points
for each group?
• How to determine the group to be split?
• How to split the group?
Given a group of points and their locations in
two frames, we can obtain the affine parameters by
solving Equation 6. In practice, the groups could
contain outliers because the segmentation is not per-
fectly. The parametric motion model (A, b) of the
affine transformation of a group G is obtained by solv-
ing the optimization problem:
(A, b) = argmin
(A,b)
∑
(x,x
0
)∈G
||ε||
l
2
subject to ε = x
0
− Ax − b
(7)
Suppose there are K groups, the division of points
is regarded as an optimization problem:
min
∑
k∈[1,...,K]
E
k
(8)
where E
k
=
∑
(x,x
0
)∈G
k
||ε||
l
2
.
Given a partition of points, each group has an
average error
E
k
=
1
N
k
E
k
with respect to its motion
model (A, b)
k
. The group with largest average errors
is selected to be split, while the largest error is marked
as the error of current partition. The selected group
can be split into 2 sub-groups using a bisecting K-
means algorithm (Selim and Ismail, 1984). Then the
number of groups is increased by 1 and a new parti-
tion of the points is computed by solving Equation 8.
If the error of the new partition is smaller than the er-
ror of the old partition, the current partition is updated
by using the new partition and motion model. Other-
wise, it means the optimal partition is found and no
groups is able to be split, i.e. the iteration comes to an
end.
4.5 Segmentation of Sequences
Section 4.4 describe the segmentation based on the
movement between two frames. To extend the seg-
mentation to sequences, we need to make use of the
historical information. A probability matrix P
N×K
is
built to indicate the probabilities of each point with
regards to each group. Here N denotes the number of
points and K is the number of groups. Given a par-
tition (G
1
, G
2
, ...G
K
), the probability of point i with
regard to group k is estimated:
p
i,k
= 1 −
ε
i,k
+
δ
K
∑
K
j=1
ε
i, j
+ δ
(9)
where δ = 0.1, which is used for preventing divided
by zero. The EM segmentation computes such a prob-
ability matrix for each pair of successive frames. If a
point presents in F successively frames, the trajectory
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
654
of movement vectors has a length of F − 1. The prob-
ability of points w.r.t. the sequence is a combination of
the probability computed from last frame pair and the
historical probabilities as shown in Equation 10. In
Equation 10, the parameter α is a factor to decrease
the weight of historical data, which is set as 0.85 in
the experiments.
p(i, k|v
f
, v
< f
) =
p(i, k|v
f
) + αp(i, k|v
< f
)
1 + α
(10)
Note that unlike other segmentation algorithms
(Shi and Malik, 1998; Borshukov et al., 1997; Elham-
ifar and Vidal, 2009), we do not require that points are
present in all frames.
4.6 Classification
The previous stages results in a segmented image,
which separates the moving objects with different
movement. For the optical flow based segmenta-
tion, the detected regions are groups of pixels, which
means the image is divided in to small image patches.
SIFT based segmentation result in groups of SIFT fea-
tures. So in the classification stage, we need to deal
with 2 kinds of input data, the pixel level images and
the bags of SIFT features.
A Support Vector Machine with an RBF kernel is
chosen to fulfill the classification task in this paper.
5 EXPERIMENT
The approach proposed in this paper gives an archi-
tecture for detecting and recognizing moving objects
from videos. The main component of our approach is
the task of motion segmentation. Thus, we will eval-
uated our approaches in the following ways:
• Evaluate object detection results, with Optical
flow based and SIFT based motion segmentation
respectively.
• Compare the segmentation results using our
method with some control approaches.
• Test the quality of classifications (recognition)
when using the result of the segmentation as in-
put.
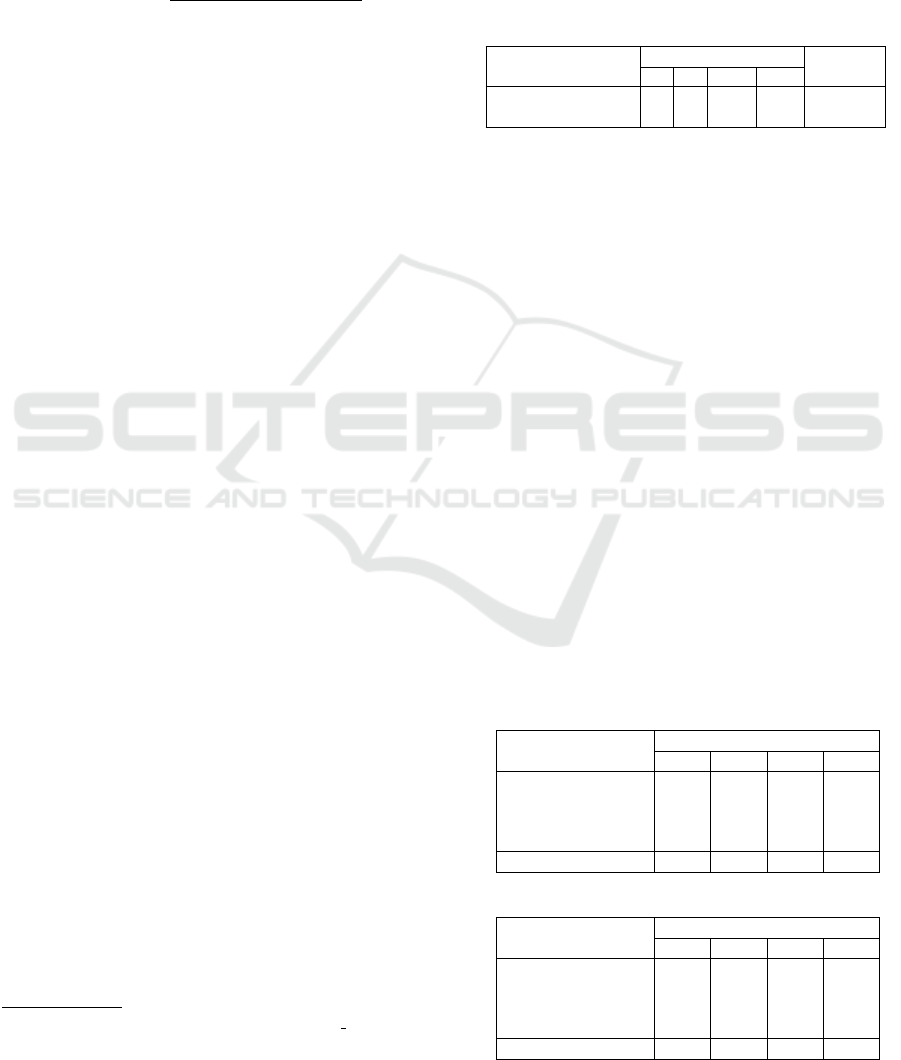
The segmentation is evaluated on video sequences
from three database: the robocup 2014 video
1
, CNnet
2014 (Wang et al., 2014) and the Hopkins155 motion
database
2
. Figure 2 shows some instances of the im-
ages from different sequences. The classification of
1
https://www.youtube.com/watch?v=dhooVgC 0eY
2
http://www.vision.jhu.edu/data/hopkins155/
segmented images is evaluated on results of all above
segmentations.
5.1 Objects Detection in Videos
Our approach is examined on the 20 videos mentioned
above, whose composition is described in Table1.
Table 1: The composition of tested videos containing dif-
ferent number of objects.
Number of videos
Number of Objects
Camera
2 3 2-3 2-4
CNnet2014 2 3 2 3 fixed
Robocup 3 2 3 2 moving
For each video clip which has a frame rate of 24
to 30 fps , a sequence of 30 frames is selected for
test. To compare the motion detection results using
optical flow and SIFT matching, we tested the ac-
curacy of segmentation results using different frame
rates. That is, new sequences are generated from each
sequence by selecting frames with an interval of itv
(where itv = 3, 5, 10), while the original sequence has
itv = 1. For the sequences with larger intervals, the
displacement of points between two frames increases.
The movement of a point is represented by its co-
ordinates in two neighbouring frames, thus there is a
set of points X
f
∈ R
2×N
f
for frames f = 1, ...F, where
N
f
is the number of feature points detected in frame
f . For the OFE motion detection N
f
is fixed for all
frames, which is 120 × 160. For the SIFT detection,
trajectories are discontinuous for SIFT points, where
N
f
varies from 300 to 500 for different frames.
Table 2 shows accuracy of segmentation results
with different intervals of sequences.
Table 2: The average accuracy (%) of segmentation us-
ing our approach, with different intervals, based on the 20
videos (from CNnet2014 and robocup competition video).
(a) Test with optical flow based motion
Number of objects
Interval of frames
1 3 5 10
2 88.2 85.4 78.2 63.6
3 91.0 82.0 81.3 61.6
2-3 79.6 73.2 65.1 59.0
2-4 76.9 69.4 60.1 58.2
all 83.9 77.5 71.2 60.6
(b) Test with SIFT based motion
Number of objects
Interval of frames
1 3 5 10
2 97.8 99.5 98.3 97.4
3 98.0 96.9 99.0 98.6
2-3 94.9 99.8 98.2 80.0
2-4 96.7 98.9 92.0 74.1
all 96.9 98.8 96.9 87.5
Motion based Segmentation for Robot Vision using Adapted EM Algorithm
655
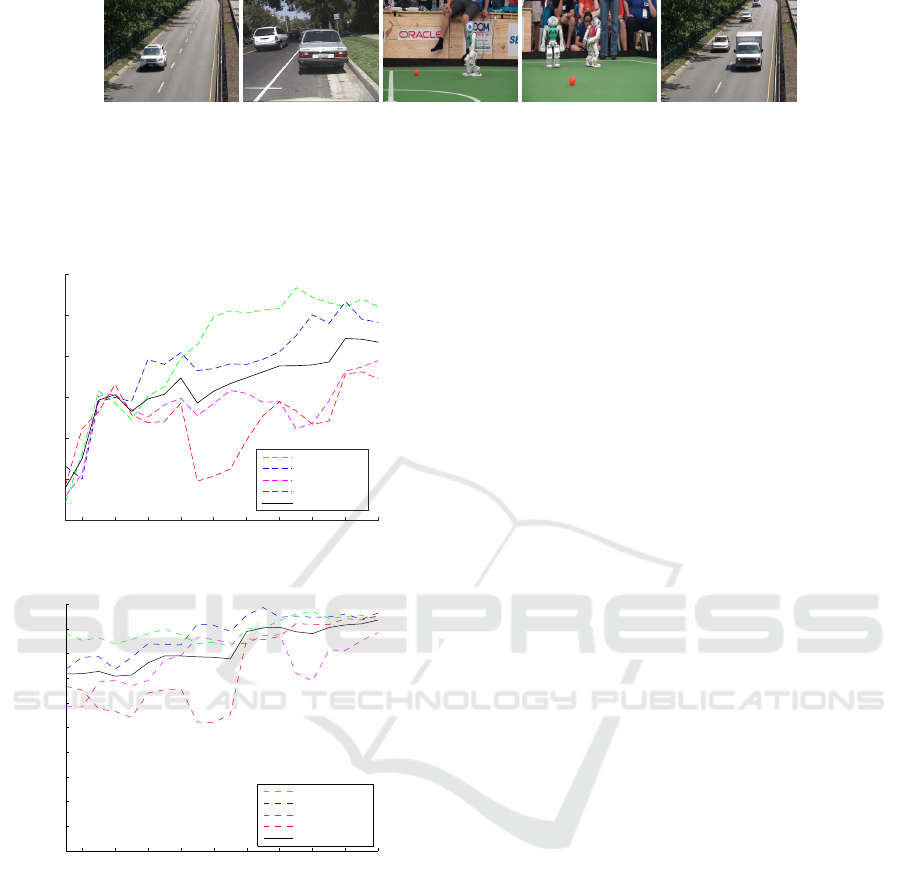
Figure 2: Images from test sequences.
Figure 3a and Figure 3b show the curves of aver-
age accuracy of motion segmentation with regards to
the number of frames that have been processed. Here
itv = 1.
Index of frames
2 4 6 8 10 12 14 16 18 20
Accuracy(%) of segmentation using OFE
40
50
60
70
80
90
100
fixed 2 objects
fixed 3 objects
varied from 2 to 3
varied from 2 to 4
all
(a) optical flow based motion segmentation
2 4 6 8 10 12 14 16 18 20
50
55
60
65
70
75
80
85
90
95
100
Index of frames
Accuracy(%) of segmentation using SIFT motions
fixed 2 objects
fixed 3 objects
varied from 2 to 3
varied from 2 to 4
all
Videos of
(b) SIFT based motion segmentation
Figure 3: Accuracy curves w.g.t. the index of frames, using
(a) Optical flow based motions and (b) SIFT based motions.
The red line indicates the average accuracy of all video se-
quences in test. The slash line indicates the average accu-
racy over sequence with different number of objects, which
are drawn with different colors.
From the result, we can make the following conclu-
sions:
1. SIFT based motion segmentation performs bet-
ter than optical flow based method in 2 ways.
Firstly The number of points of SIFT detection
are smaller, which requires for less computational
resources. Secondly, the accuracy of SIFT based
segmentation is always higher than optical flow.
2. For the sequences with changing number of ob-
jects, the accuracy fluctuates at the frames where
the number of objects changes. Despite the
changing number of objects, both methods show
an general increasing trend in segmentation accu-
racy.
3. The approach can deal with fixed number of ob-
jects as well as changing number of objects, with
a maximum of 4 objects in the test. The per-
formance of segmentation with changing number
of objects is slightly worse than the test with fix
number of objects.
5.2 Comparison of Motion
Segmentation
In this section, a comparison test is described based
on the database of Hopkins155, which contains of 155
videos of 29 or 30 frames, each contains 2 or 3 mov-
ing objects. The trajectories of feature points are pro-
vided by the database (the average number of feature
points is 266 for 2 objects, while it’s 398 for 3 ob-
jects). Only the segmentation part of our approach
is evaluated in this section. The objects of “checker-
board” make 3D rotations and translations. The “traf-
fic” sequences contain moving vehicles of outdoor
traffic scene. The remaining sequences named “artic-
ulated” contain motions constrained by joints, head
and face motions, people walking, etc. Over half of
the videos are taken using a moving camera.
Our segmentation method named as adapted EM
segmentation for motion sequences (AEMS), is com-
pared with the SSC (Elhamifar and Vidal, 2009), LSA
(Yan and Pollefeys, 2006), RANSAC (Fischler and
Bolles, 1981), and ALC (Rao et al., 2008). Table
3 shows the segmentation accuracy for sequences of
Hopkins155, Table 4 shows the accuracy of finding
the number of objects in sequence for AEMS.
The SCC outperforms all methods in general. The
performance of our approach varies for categories.
On average, our method ranks 3rd out of 5 methods.
We can also draw the conclusion from the results:
1. AEM performs with a high accuracy of 99% when
there are only 2-dimension translations.
2. AEM is sensitive to 3-dimensions rotation and
scaling.
3. AEM can find the number of objects automati-
cally, with a high accuracy of 96.2%.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
656
Table 3: Accuracy (%) of motion segmentation using dif-
ferent methods.
(a) sequences with 2 motions.
LSA RANSAC ALC SSC AEMS
Checkerboard:78 sequences
97.4 93.5 98.5 98.8 93.4
Traffic:31 sequences
94.6 97.4 98.4 99.9 99.4
Articulated: 11 sequences
95.9 92.7 89.3 99.4 93.2
All: 120 sequences
96.0 94.5 95.4 99.4 95.3
(b) sequences with 3 motions.
LSA RANSAC ALC SSC AEMS
Checkerboard:26 sequences
94.2 74.2 94.8 97.0 86.6
Traffic:7 sequences
74.9 87.2 92.3 99.4 99.1
Articulated: 2 sequences
92.8 78.6 78.9 98.6 79.6
All: 35 sequences
87.3 80.0 88.7 98.3 88.4
(c) all sequences.
LSA RANSAC ALC SSC AEMS
All:155 sequences
91.6 87.3 92.0 98.8 91.9
Table 4: Accuracy (%) of estimating the number of objects.
Number
of objects
Checker-board Traffic Articulated
2 92.8 96.6 81.2
3 86.7 98.4 83.6
all 89.9
4. The AEM methods is not affected by the camera
with a 2-dimensional movement, since the video
sequences used in the experiment are taken using
a fixed or a moving camera.
Note that the comparative methods require trajec-
tories with fixed dimensions, as well as with a fixed
number of moving objects. In contrast, our method is
able to handle changing numbers of objects, and fea-
ture points that presented in only a part of a trajectory.
5.3 Classification
The result of motion segmentation provides groups
of points, each of which should represent one object.
The next step is to recognize the objects. We classify
the segmented results using a SVM classifier. There
are two types of segmentation results in section 5.1:
1. optical flow based method provides image frac-
tions because points are pixels from image;
2. SIFT based methods gives the groups of SIFT
points, each point is associated with a feature vec-
tor. The groups of SIFT features are coded into
vectors of the same dimension using the bag of
word methods (Csurka et al., 2004).
The sequences contain 8 categories of objects, includ-
ing cube, conical frustum, curved paper, car, truck,
robot, pedestrian, face. We used a training set con-
tains 80 sequences from the total 20 + 155 sequences
for training and the rest for testing.
The classification results of the 8 categorises are
listed in Table 5a. Table 5b shows the classification
results of only for cars and trucks, using a classifier
that was trained with a different database namely Cal-
tech256
3
.
The results indicate that, segmentation accuracy
is sufficient to recognize the objects, for the database
tested.
6 CONCLUSIONS
In this paper we proposed an architecture for mov-
ing object detection and recognition in video se-
quences based on detecting changes and clustering
movements. We compared two approaches for de-
tecting objects motions. One is based on optical flow
motion detection which detect the changes between
pixels. The other is based on SIFT which detect the
SIFT points and find the motions by matching points
between frames. An adapted EM algorithm is used
to cluster the moving points, which gives us the seg-
mentation. An SVM is used to identify the segmented
objects.
The results shows that higher level-feature (SIFT)
has the advantage of a lower computation time and a
higher accuracy in segmentation. The main character-
istic of our methods has the ability to handle a chang-
ing set of feature points. Because of the objects move-
ments, feature points may not be visible in all frames.
Moreover, our method can determine the number of
objects. Experiment shows that our method perform
especially well for the 2D movement.
In the future work, we need to evaluate our method
on sequences with more than 4 objects. An extension
to a 3D motion model is also needed for applications
in robot vision. Last but not least, more research is
needed with regard to the other methods of feature
detecting and motion extraction.
3
http://authors.library.caltech.edu/7694/
Motion based Segmentation for Robot Vision using Adapted EM Algorithm
657

Table 5: Accuracy (%) of classification using SVM.
(a) All sequences
robots cars trucks pedestrian Conical cube cylinder face
OFE 78 92 100 72 98 93 96 98
SIFT 82 89 66 75 95 95 97 99
(b) “cars” and “trucks”
cars trucks
OFE 97.9 98.5
SIFT 97.2 96.9
REFERENCES
Borshukov, G. D., Bozdagi, G., Altunbasak, Y., and Tekalp,
A. M. (1997). Motion segmentation by multi-stage
affine classification. IEEE Trans. Image Processing,
6:1591–1594.
Boser, B. E., Guyon, I. M., and Vapnik, V. N. (1992). A
training algorithm for optimal margin classifiers. In
Proceedings of the fifth annual workshop on Compu-
tational learning theory, pages 144–152. ACM.
Bouguet, J.-Y. (2001). Pyramidal implementation of the
affine lucas kanade feature tracker description of the
algorithm. Intel Corporation, 5.
Csurka, G., Dance, C., Fan, L., Willamowski, J., and Bray,
C. (2004). Visual categorization with bags of key-
points. In Workshop on statistical learning in com-
puter vision, ECCV, volume 1, pages 1–2. Prague.
Dempster, A. P., Laird, N. M., and Rubin, D. B. (1977).
Maximum likelihood from incomplete data via the em
algorithm. Journal of the Royal Statistical Society. Se-
ries B (Methodological), pages 1–38.
Elhamifar, E. and Vidal, R. (2009). Sparse subspace clus-
tering. In Computer Vision and Pattern Recognition,
2009. CVPR 2009. IEEE Conference on, pages 2790–
2797. IEEE.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Horn, B. K. and Schunck, B. G. (1981). Determining optical
flow. In 1981 Technical Symposium East, pages 319–
331. International Society for Optics and Photonics.
Karasulu, B. and Korukoglu, S. (2013). Moving object de-
tection and tracking in videos. In Performance Evalu-
ation Software, pages 7–30. Springer.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Computer vision, 1999. The pro-
ceedings of the seventh IEEE international conference
on, volume 2, pages 1150–1157. Ieee.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Lucas, B. D., Kanade, T., et al. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In IJCAI, volume 81, pages 674–679.
Martinez-Conde, S., Macknik, S. L., and Hubel, D. H.
(2004). The role of fixational eye movements in vi-
sual perception. Nature Neuroscience, 5:229 – 240.
Narkhede, H. (2013). Review of image segmentation tech-
niques. International Journal of Science and Modern
Engineering (IJISME), 1:5461.
Pan, Z. and Ngo, C.-W. (2005). Selective object stabiliza-
tion for home video consumers. IEEE Trans. Con-
sumer Electronics, 51(4):1074–1084.
Rao, S. R., Tron, R., Vidal, R., and Ma, Y. (2008). Mo-
tion segmentation via robust subspace separation in
the presence of outlying, incomplete, or corrupted tra-
jectories. In Computer Vision and Pattern Recogni-
tion, 2008. CVPR 2008. IEEE Conference on, pages
1–8. IEEE.
Seerha, G. K. and Rajneet, K. (2013). Review on recent
image segmentation techniques. International Jour-
nal on Computer Science and Engineering (IJCSE),
5:109–112.
Selim, S. Z. and Ismail, M. A. (1984). K-means-type algo-
rithms: a generalized convergence theorem and char-
acterization of local optimality. Pattern Analysis and
Machine Intelligence, IEEE Transactions on, (1):81–
87.
Shi, J. and Malik, J. (1998). Motion segmentation and track-
ing using normalized cuts. In Computer Vision, 1998.
Sixth International Conference on, pages 1154–1160.
IEEE.
Wang, J. Y. and Adelson, E. H. (1994). Representing
moving images with layers. Image Processing, IEEE
Transactions on, 3(5):625–638.
Wang, Y., Jodoin, P.-M., Porikli, F., Konrad, J., Benezeth,
Y., and Ishwar, P. (2014). Cdnet 2014: An expanded
change detection benchmark dataset. In Computer Vi-
sion and Pattern Recognition Workshops (CVPRW),
2014 IEEE Conference on, pages 393–400. IEEE.
Weiss, Y. (1997). Smoothness in layers: Motion segmenta-
tion using nonparametric mixture estimation. In Com-
puter Vision and Pattern Recognition, 1997. Proceed-
ings., 1997 IEEE Computer Society Conference on,
pages 520–526. IEEE.
Yan, J. and Pollefeys, M. (2006). A general framework for
motion segmentation: Independent, articulated, rigid,
non-rigid, degenerate and non-degenerate. In Com-
puter Vision–ECCV 2006, pages 94–106. Springer.
Zappella, L., Llad
´
o, X., and Salvi, J. (2008). Motion seg-
mentation: a review. In Proceedings of the 2008 con-
ference on Artificial Intelligence Research and Devel-
opment: Proceedings of the 11th International Con-
ference of the Catalan Association for Artificial Intel-
ligence, pages 398–407. IOS Press.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
658
