
Intelligent Infrastructure for Last-mile and Short-distance Freight
Transportation with Electric Vehicles in the Domain of Smart City
Logistic
Volkmar Schau, Sebastian Apel, Kai Gebhardt, Johannes Kretzschmar, Christian Stolcis,
Marianne Mauch and Johan Buchholz
Department of Computer Science, Friedrich Schiller University Jena, Ernst Abbe Platz 2, Jena, Germany
Keywords:
Smart City Logistic, Electric Vehicle, Software Architecture, Range Prediction, Logistic Ontology, Accep-
tance Study, Usability, Simulation, Generic Interface, Intelligent System.
Abstract:
The current living standard of industrial nations causes increasing CO2 emissions, particulate matter, and
noise pollution. An essential amount of these environmental issues is induced by stop-and-go traffic within
cities which is seriously characterized by short-distance freight transport trips with inner-city and suburban
distances. The Smart City Logistik project strives for a practical and short-term solution to this problem in the
concrete context set by the city of Erfurt, Germany. This paper provides the results of an open and intelligent
infrastructure for transportation with electric vehicles. The special focus is on holistic reflection of ICT support
in the electric city logistic.
1 INTRODUCTION
The launch of the German national development plan
for electro mobility (Bundesregierung Deutschland,
2012) has spawned some activities and projects, rang-
ing from research to industrial development, and
sporting goals with short-term as well as long-term
lifelines. In most cases the obvious shortcomings of
currently available, fully electric vehicles (EVs) are
addressed and tackled with a particular mix of vari-
ous technologies.
The main problem identified was, of course, the
limited range of available cars. Long-term projects
focus, in this context, to a large extends on the devel-
opment of innovative battery technologies. However,
most researchers agree that until 2020, and well be-
yond, batteries will not be able to guarantee driving
ranges close to what can be achieved today with tra-
ditional gasoline-driven engines, as least if a viable
weight to power ratio must be the goal. Thus, a num-
ber of alternative projects have taken as a premise that
we will have to cope with limited ranges for at least
the next decade. Based on this assumption the chal-
lenge is to support available EVs by other technolo-
gies to reach maximum usability. One of these alter-
natives, and maybe the most important one, is infor-
mation and communication technologies (ICT).
The special federal research program Information
and Communication Technologies for Electric Mobil-
ity II (ICT II) has, thus, been established in Germany
to leverage the capabilities of ICT-based research by
adapting available and new concepts to the individual
needs of electro mobility (Bundesregierung Deutsch-
land, 2013). The projects funded by this program
strive mostly for short and medium-term solutions
with a clear focus on immediate applicability and an
early market entry. The coordinator and manager of
this research program is the German Federal Ministry
for Economic Affairs and Energy (BMWi).
Achieving these goals, is done by bundling insti-
tutions with industrial partners within related service
domains. Thus, each research project combines EV
suppliers, end-users (application partners, companies,
and individual drivers), and other domain-specific
players (in this case a provider for logistics and fleet
management software). The so formed consortium
will not only strive to reach some well-structured re-
search goals but will work towards a prototype solu-
tion industrial strength. Thus, besides research and
development objectives the project will also address
questions regarding marketing and sales. Deliverables
include not only papers and concepts but, as already
mentioned, readily available tools and a viable eval-
uation of the integrated solution in a practical setting
Schau, V., Apel, S., Gebhardt, K., Kretzschmar, J., Stolcis, C., Mauch, M. and Buchholz, J.
Intelligent Infrastructure for Last-mile and Short-distance Freight Transportation with Electr ic Vehicles in the Domain of Smart City Logistic.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 149-159
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
149
(major field test). In most cases this leads to a con-
sortium that has a well-established track record in a
particular application domain. Also, a real life test-
bed has to be located to enable the physical field test.
The Smart City Logistik (SCL) project (DAKO,
2015) targets the application domain of inner city
merchandise traffic. The concept is to unload cargo
from heavy trucks on the citys perimeter and to run
the last miles with small and medium sized EVs.
In most cases the logistics partners also utilize stor-
age facilities outside the city to provide additional
buffer capabilities and to decouple long-range from
short-range traffic in this way. The city of Erfurt, in
Thuringia, Germany, has been chosen as test-bed be-
cause it has passed stringent laws regarding inner city
transport that will, most likely, favor EVs as the main
transport medium of the future.
The challenge is to support this fleet of transport-
EVs with an ICT system that provides for an inte-
grated interface to existing logistics systems, as well
as to estimate and manage each individual vehicles
range, itinerary, and routes with a highly adaptive
solution. Based on limited battery capacity, always
changing environmental conditions, the usual short-
term necessary adaptations in the planned itinerary,
and stringent legal requirements SCL expects a steady
rate of exceptions that have to be handled by the sys-
tem in real-time. Besides, there will be no guarantee
that all EVs in the fleet will be online all the time, sim-
ply due to possible problems with the cell-phone net-
work in more remote areas, during inclement weather,
or because of overload and technical defects.
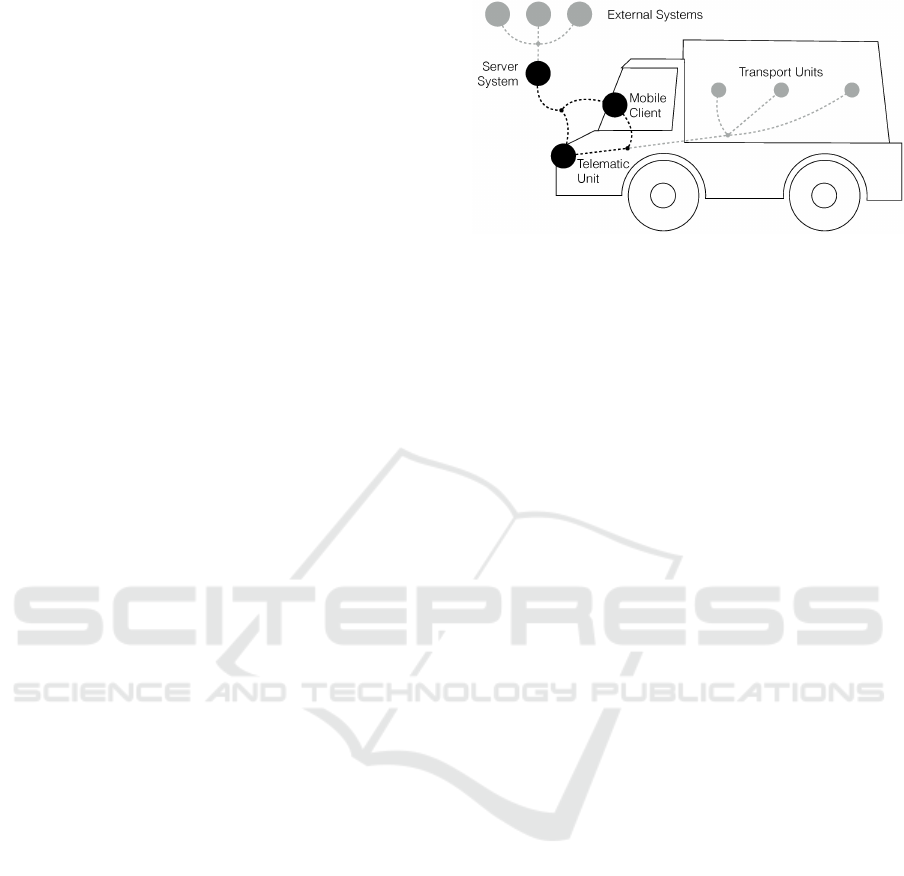
From a technological point of view (see figure
1) the SCL system is a distributed, mobile ICT sys-
tem with a central server unit and fat driver assis-
tant client (DAC) that have the capability to run in-
dependently from the main server while computing,
at least, all essential services in the case of a discon-
nect. The central server itself has to be usable as a
standalone service as well as a system in addition to
existing system landscapes within logistical compa-
nies. Runtime consumption and vital data from EVs
in this setup have to be collected and transmitted by
using telematic units as interfaces for EVs controller
area network (CAN) busses. Furthermore, it is impor-
tant to know about the acceptance of drivers by using
the DAC. By performing multiple acceptance tests
within SCL, not only by testing the DAC, it is pos-
sible to ensure the usability of the resulting systems.
As a federally funded project, SCL also strives for a
solution that is not proprietary to a company, open for
changes and additions in the future, and based on a
widely published and standardized ICT-architecture
(Schau et al., 2015).
Figure 1: SCL platform overview: in-car elements like
DAC, transportation units and telematic unit communicates
over the air with a centralized server which is used as a plan-
ing, monitoring and data system and can be used as a bridge
through external systems.
2 RELATED WORK
The German BMWi funds multiple projects which in-
vestigates into the key subjects of ICT II. The focus
of ICT II is on new concepts for intelligent technol-
ogy in EVs (Smart Car) combined with power supply
(Smart Grid) and concepts for mobility (Smart Traf-
fic) (Bundesregierung Deutschland, 2013).
The ICT II funded collaborative research project
sMobility tried to link existing components of the in-
frastructure using an open ICT-platform. Special fo-
cus is on price controlled and decentralised charg-
ing of EVs and on navigation, which is optimized for
journey time using actual traffic and car data, as well
as on intelligent flow regulation technology. In the
city of Erfurt, an intelligent and linked transport in-
frastructure is constructed. Related live data is pro-
vided within a distributed cloud system (INNOMAN,
2015). Like SCL sMobility created a range prediction
model to optimize the route considering local traffic
information. A unique characteristic of sMobility is
the collection of traffic data using detectors along the
road. The sMobility range prediction model is less
specific than SCL and focusing on intermodal and
private transportation. On the other hand, the high-
detailed data can be used within SCL as possible data
sources for more precise range predictions.
iZEUS, which was also funded by ICT II, consid-
ered more complex standards for controlled charging
of EVs. During the whole day, we have big fluctu-
ations in the power supply because of regenerative
energy like solar and wind produces. Therefore, the
project tried to regulate the charging intensity in a way
the drivers needs won’t be restricted. Decentral stor-
age in EVs with an energetic recovery system is one
of their primary project focus. An onboard charging
system and an efficient energy management with an
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
150

infrastructure for communication between two actors
of a B2B car fleet was conceptualized. A service de-
tects the next electric charging station and municipal-
ity. Private and business customer tested this technol-
ogy (EnBW, 2015) and evaluates their usability within
an acceptance survey. In contrast, to SCL the focus is
on the calculation of efficient routes and visualization
of remaining ranges to specific destinations. Unfor-
tunately, the management and range prediction isn’t
working together as required in SCL to support an in-
stallation within most logistic scenarios.
Adaptive City Mobility (ACM), funded by ICT II,
develops an electric micro car with a portable system
to change rechargeable batteries for urban traffic and
logistic - used as eTaxi fleet (VISPIRON CARSYNC,
2015). As mentioned in other projects before ACM
linkd several components like the ICT of the EV,
mobile units, central cloud services and - unique for
this project - charging stations. Concerning of self-
designed electric micro car and their telematic unit
ACM can provide information about the state of the
rechargeable battery, the remaining range and the next
charging station within their mobile client.
eTelematik was a second collaborative re-
search project in cooperation with Friedrich-Schiller-
University Jena (Navimatix, 2015) and was funded by
Zentrales Innovationsprogramm Mittelstand (ZIM).
The project focused on a solution for municipality us-
ing a special prototype of Multicar as a EV. That EV
can be utilized (e.g.) as a road sweeper or a snow
plow through different extensions. The Multicar was
equipped with an individual telematic unit, to collect
data, and with a driver assistance system. The real-
ized system platform focused on task management,
and the enclosed range estimation model is based on
neuronal networks. This kind of model leads to ma-
chine learnable results but is expensive in calculation
(Beikirch, 2015).
E-Wald, funded by a Bavarian research program,
is a collaborative research project in Bavarian For-
est that aims at rural areas. Using newly developed
and intelligent charging devices and communication
concepts E-Wald wants to proof that electric mobility
works in that rural areas as well. The project is devel-
oping a new generation of a fast charging station for
all charging systems. Focus is on a wire- and plugless
charging concept. Just as SCL it uses a range esti-
mation model. The range estimation model uses ge-
ographical information, the state of the rechargeable
battery, outdoor temperature, driveability, as well as
information about topography and road system based
on a statistical model. The range estimation, used by
a mobile client, will be shown like a blue sky on the
map and will be calculated car dependent (Technische
Hochschule Deggendorf, 2015). Step by step E-Wald
optimized their range estimation model by adding one
parameter at the time. SCL examined the parame-
ter which influences the range of an EV at first. The
range estimation model was designed afterward.
3 ARCHITECTURE
SCL combines highly frequented telematic data, cen-
tral server infrastructure and a DAC to get EV more
useable, safe in planning and perfectly usage of their
ranges. Starting with interviewing dispatchers and
drivers about their everyday work in inner-city logis-
tic companies (Apel et al., 2015a) shows a brief in-
sight into their existing processes and used system
landscape. Logistic companies mostly use special-
ized supply chain management (SCM) systems like
transport management systems (TMSs) or warehouse
management systems (WMSs) to manage their or-
ders. The decision, which system is used, depends
on their business orientation. Companies with a fo-
cus on selling products would use WMS to manage
their stocks and orders in addition to transportation
planning. Conversely, companies with a focus on
transportation and route management will use TMS to
manage their available transportation resources. Un-
fortunately, these systems don’t care about particular
range restriction of EVs and their requirements for
transportation tours. Handling this range restrictions
and requirements are, were the SCL platform has to
be embedded.
The SCL platform wants to provide planning and
monitoring tools for EVs which has to be used in ad-
dition to existing processes and system landscapes
in logistic companies. To get in this existing sys-
tem landscapes, two analyses has to be done: what’s
about their processes and which software is involved,
more specifically which interfaces can be used to
get related data. Processes could be analysed and
generalized by using the previously done interviews
(Apel et al., 2015b) and validated in literature about
SCM (Chopra and Meindl, 2007) and logistic pro-
cesses (Arnold et al., 2002). The last points, about
interfaces, leads to a difficult challenge within this
domain. Taking a closer look at available systems
shows a heterogenic interface landscape (Busch et al.,
2003; Logistik Heute, 2005; Pirron et al., 1999; Faber
and Ammerschuber, 2007). There are several pro-
cess standardizations like RosettaNet
1
and United Na-
tions Electronic Data Interchange for Administration,
1
RosettaNet is globally organized between nearly 600
companies and managed by the GSI US, defines logistical
processes and terminology.
Intelligent Infrastructure for Last-mile and Short-distance Freight Transportation with Electric Vehicles in the Domain of Smart City Logistic
151
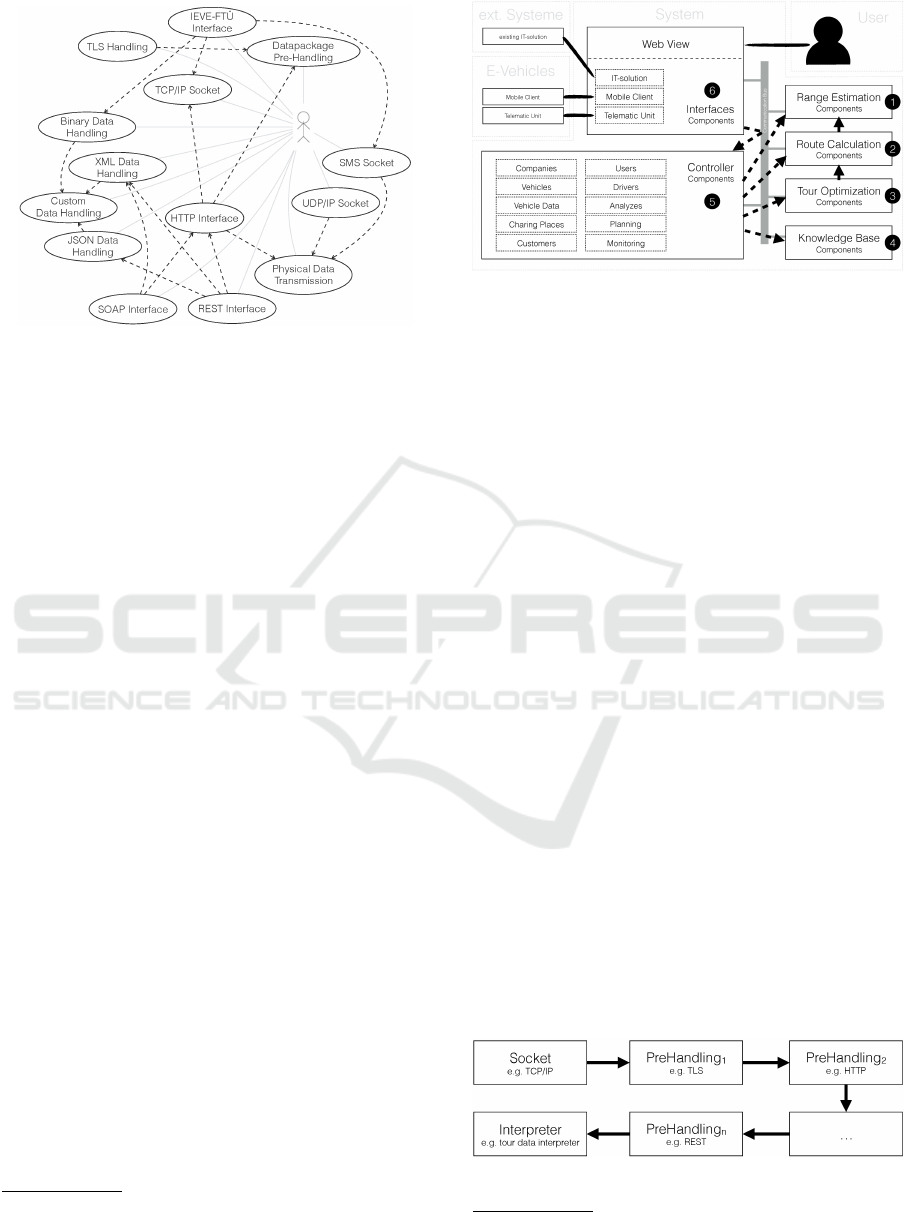
Figure 2: Use cases for interfaces within the SCL system
landscape.
Commerce and Transport (UN/EDIFACT)
2
influenc-
ing the way these systems work, as well as what ter-
minology to use within this domain. Unfortunately,
the data exchange itself is not standardized. There is
a broad range of proprietary, Representational State
Transfer (REST) or Simple Object Access Protocol
(SOAP) interfaces with Extensible Markup Language
(XML), JavaScript Object Notation (JSON) or again
something proprietary, as well as electronic data inter-
change (EDI) based file exchange or custom Ameri-
can Standard Code II (ASCII) file export mechanics.
The most common interface can be found for financial
information, like DATEV, sadly this one would not
help at all. Adding those known interface use cases
in addition to required interfaces to the DACs and the
telematic units would lead to a wide range as shown
in figure 2.
To achieve these goals several required compo-
nents has to be orchestrated within an architecture as
shown in figure 3 for planing, monitoring and ana-
lyzation. The first one is the range estimation com-
ponent itself (1). This component should have capa-
bilities to handle precise forecasts on planed routes, as
well as mechanics to learn from already driven routes.
After that a route calculation component (2) can use
this range component to score routes, and in turn can
be used from tour optimization component (3) which
combines different routes in one tour to get an energy
optimized result. Data within this system, in detail
every related entity like drivers, vehicles, orders and
shipments, as well as charging stations, users, com-
panies and customers, has to be handled and get as-
sociated in a knowledge base component (4). Beside
this a bunch of components to handle different types
2
Known as X12 from USA and EDIFACT from Europe
and combined to the global standard UN/EDIFACT can be
used as exchange standards for logistic related data.
Figure 3: Overview of the SCL architecture. Each model,
controller and view component interacts within this system
by using a communication bus for private and broadcast
messages.
of requests has to be added (5). Those components
handles requests about already named tasks like mon-
itoring, planning and analyzing, as well as managing
their related core data like available vehicles, drivers,
users and customers in addition to basic data like ve-
hicle type data
3
and charging places. All components
has to communicate by using a internal communica-
tion bus. Components can listen for events, release
event and start a private communication with an other
component. This part is based on an observer pattern
(Gamma et al., 1994, p. 326), futhermore those ob-
servers would’t be registered for special observables,
they will be registered in a global context, which cre-
ates something like a enterprise service bus (Chap-
pell, 2004, p. 2) between those components. Exter-
nal systems can be embedded within this architecture
by adding a specific interface component (6) which
transformes external communication flows to internal
ones. This architecture draft with their model compo-
nents (range, route, tour and knowledge), controller
components and interface components adaptes the
Model-View-Controller (MVC) (Buschmann et al.,
1996, p. 125) pattern to minimize coupling and max-
imize cohesion.
Challenging the problems with this broad range of
possible external systems is done by splitting up each
part of a communication between two participants. In
preparation three strategies were developed to handle
Figure 4: Pipeline strategy for interface components.
3
Each vehicle instance depends on a previously defined
vehicle data entry.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
152
this communication in SCL. The first one handles this
broad range by creating a inheritance tree for differ-
ent specializations of interfaces. The second, finally
used within this architecture, made use of the pipeline
concepts (Buschmann et al., 1996, p. 53) to split each
transformation step within a communication stack de-
fined by the OSI reference model (ISO/IEC JTC 1,
1994). Each step like Transmisson Control Protocol
(TCP), Hypertext Transfer Protocol (HTTP), Trans-
port Layer Security (TLS) can be rearranged in a fixed
order to handle a specific communication stack like
shown in figure 4. The last one describes a strategy
where the interface itself isn’t handled directly. This
means, the architecture describes well defined appli-
cation programming interfaces (APIs) for each exist-
ing request type. An interface developer has to use
this API and implement the whole interface as a plu-
gin for this system. Because of the expanding number
of dependencies in case of using inheritance trees and
heavily not reusable characteristic of an API strategy,
the SCL platform uses the pipeline strategy to get con-
figurable interfaces for wide ranges of existing sys-
tems.
The system described above and realized within
SCL can be used as a basic infrastructure within the
SCL platform. The next step would be to embed the
corresponding components like range estimation and
knowledge base. Furthermore, the entities defined by
this knowledge base can be used to describe a data ex-
change model for component interactions within this
internal communication bus.
4 RANGE ESTIMATION MODEL
The use of EVs in the transport sector is challeng-
ing because the range of available small and medium
sized transport vehicles is relatively small. To han-
dle this challenging usage, a precise range estima-
tion method is needed, which can calculate the energy
consumption of a tour as closely as possible. This es-
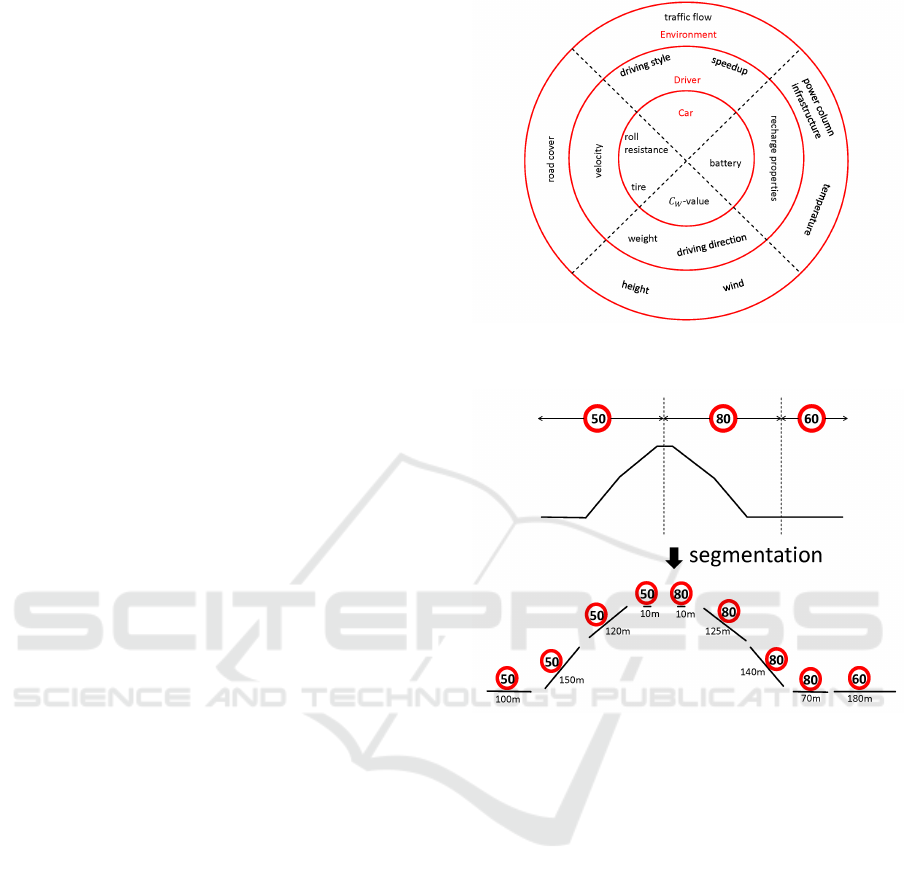
timation method is a difficult task, because many fac-
tors have an effect on the energy consumption of an
EV. Significant influence factors are shown in figure
5 (Conradi, 2012).
So a research goal of this work is to provide such
a range estimation method. A weakness of existing
solutions is a very high dependency on the regarded
car type. Rogge et al. tries to model a Mitsubishi i-
MiEV in Matlab and uses as influence factors the car’s
weight, average energy consumption of an i-MiEV,
ramp of road, air resistance and frictions. Most of
this parameters are vehicle specific. Ondruska and
Posner use a similar approach with a combination of
Figure 5: Influence factors on energy consumption by driv-
ing an EV (Conradi, 2012).
Figure 6: Segmentation of a tour.
stochastic methods and physical considerations (On-
druska and Posner, 2014). This approach bases on
technical aspects of a Nissan Leaf.
Therefore, an algorithm without physical consid-
erations can avoid these disadvantages. The energy
consumption of a new tour is predicted by compar-
ing the tour with known tracks. In order to perform
this task, a similarity measure between tours is nec-
essary. First, a model is developed to describe a tour
by dividing it into segments. Figure 6 shows an ex-
ample. A tour is analyzed from start to end and a
new segment begins at each point where at least one
parameter changes the value. The example uses the
parameters velocity and ramp of road. It follows that
a segment can be described by constant values in each
influence factor. As presented in figure 7, groups are
formed by using the cross product of segments for
each influence factor. Each group is visualized with
one cuboid. For example, velocity is divided into
three intervals with the limits zero to ten, ten to twenty
and twenty to thirty.
Intelligent Infrastructure for Last-mile and Short-distance Freight Transportation with Electric Vehicles in the Domain of Smart City Logistic
153
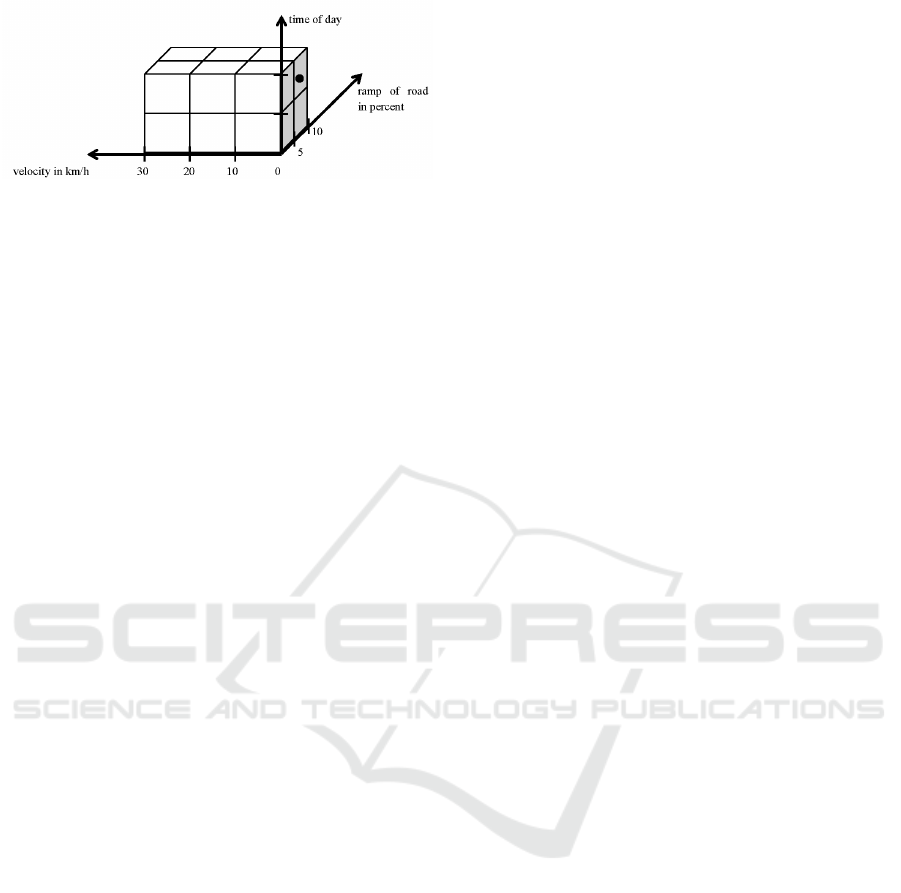
Figure 7: Visualization of groups.
The estimation method is based on a learning data
set. Which use segments, with a known energy con-
sumption value. The telematic unit used in SCL gen-
erates those consumption values in the case of tour
execution. Using these measured values as learning
data set can update the range estimation model with-
out additional development efforts. The learning data
segments are sorted into groups depending on their
values for the influence factors. Then for each group
the average energy consumption of segments in this
group is calculated. On this way, a look-up table is
generated containing the energy consumption of each
group.
To estimate the consumption of a new segment,
the known factors of influence of this segment has
to be used to get the related group. The average en-
ergy consumption of this group is used as an approxi-
mation of the energy consumption for this new seg-
ment. The approach was tested on a real data set,
which was generating with a Mitsubishi i-MiEV. The
result shows that this prediction model has a rela-
tive error about eight percent. This relative error is
a good standing similar to the approach of Ondruska
and Posner. A benefit of this approach is the run-time.
New segments can be predicted by looking into the
pre generated look-up table. The estimation method
is described in more detail in (Gebhardt et al., 2015).
5 KNOWLEDGE BASE
Concerning software architecture for supporting EVs
in logistics as introduced in section 3, a comprehen-
sive conceptual data model had to be developed. This
model should be able to support the delegation and
monitoring of transport chains and tasks in all kind of
versatile logistic scenarios. Due to the requirements
analysis, there were several problems:
• The data model should be easily and potentially
semi-automatically adoptable to all kinds of dif-
ferent logistic scenarios. The three application
scenarios of SCL serve here as a benchmark.
• Data aggregation and management is supposed to
be directly supported by the data model itself.
This point is especially targeted to the fact, that
the data model should include some kind of se-
mantic data layer. By this, it would be possible to
combine and integrate databases of different ap-
plication partners.
• It should enable gaining extensive implicit infor-
mation and data, which support the disposition of
tours, staff and resources actively.
• Finally, the data model should cover especially the
electric specific aspects of logistic domains.
The generic requirement and the extraction of im-
plicit information suggested the use of a descriptive,
logic-based specification for the data model. There
are far reaching works in this field of research in the
context of logistic applications like (Lian et al., 2007)
or (Jinbing et al., 2008). The SCL approach is based
on existing formal ontologies like GenCLOn (Anand
et al., 2012), which provide an essential vocabulary to
describe logistic concepts and relationships. The use
of quasi-standards also enables the subsequent imple-
mentation and application of the SCL system by ref-
erencing to top domain models.
Unfortunately, none of these existing ontologies
and models covered all necessary aspects of the un-
derlying SCL application area. Therefore, the con-
ceptual model has to be extended due to the primary
use of EVs at first. These enhancements were made
especially regarding the influence parameters for the
range of EVs as described in section 4. The lim-
ited range and charging behaviors are a critical factor
for the acceptance of application of EVs and should
be therefore supported by the data model. The goal
hereby is to assist the dispatcher and the DAC to iden-
tify early flaws of a given tour or execution state.
Furthermore, the SCL requirement analysis
showed, that the existing ontologies only provide a
very general and common vocabulary to include con-
cepts and relations of a logistics domain. So besides
the electric driven aspects, these ontologies had to be
extended by definitions to enable the description of
legal regulations like driving times, hazardous cargo
or driving licenses classes. These concepts are like-
wise very heterogeneous and difficult to recognize,
especially in transnational contexts but indispensable
for supporting the dispatching of logistic tours. The
SCL system is supposed to be a comprehensible as-
sisting system, which is able to recognize legally in-
valid tours by checking the consistency of a given rule
base. Although such a rule base provides a very ele-
gant way to extend and adapt to future use cases or
potentially changes according to the law without the
need for changing data processing algorithms based
on a underlying model. This approach is described
on the basis of driving licenses according to the EU
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
154
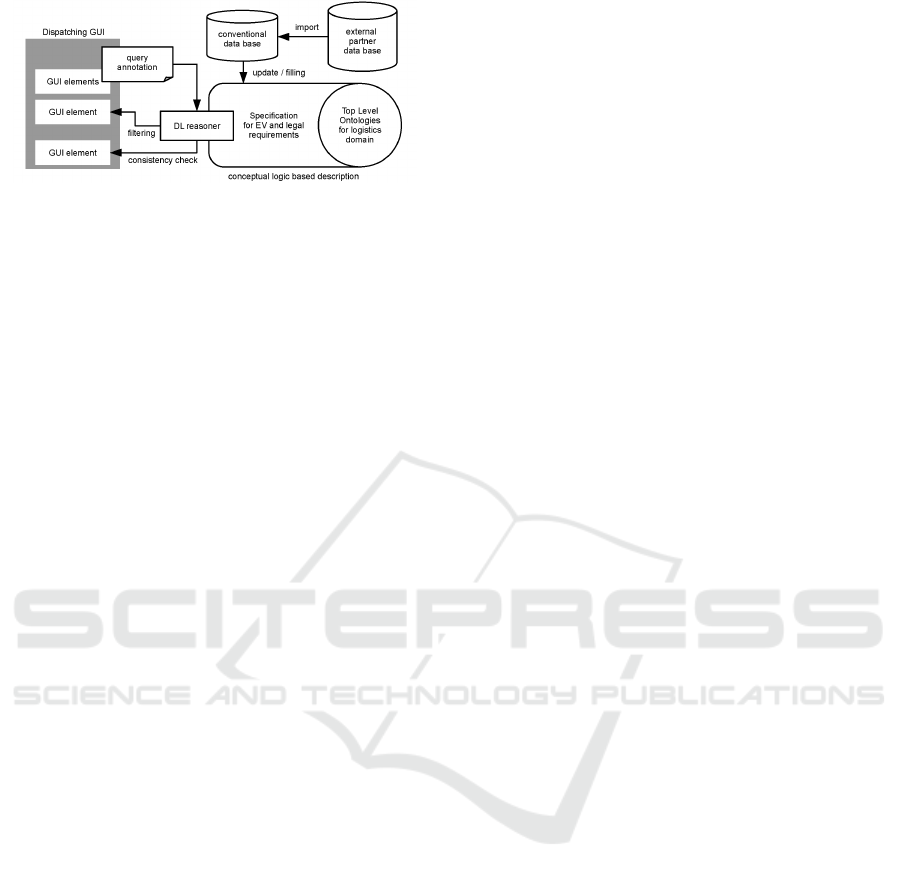
Figure 8: Integration of the knowledge base as semantic
representation of data models and assistance for dispatching
and monitoring logistics.
norms in (Prinz et al., 2015) in detail. Here the imple-
mentation of the rule base occurred in a Prolog pro-
gram and information was retrieved by reasoning. By
this the SCL system is able to support the dispatching
of logistic tours as systematic queries restricted given
options. Errors could be prevented by early consis-
tency checks and even corrected automatically.
The ontology, respectively the rule base, repre-
sents the formal semantic layer of a given data model,
which is provided by an external application partner.
Therefore, there has to be a specific import algorithm
for every data model, which realizes the inflation of
the ontology. By this, the ontology only serves as
an inferential database. Database changes are made
in the common data model and are imported back to
the semantic layer. Due to the complexity of logic
descriptions and inferential data, it is not feasible to
transfer data from the semantic description to conven-
tional relational databases.
Furthermore, not every end user, especially in the
field of logistics dispatching, can be assumed to be a
knowledge representation engineer. So, there has to
be some kind of opaque access and inference mecha-
nism. This problem is faced by combining a conven-
tional graphical user interface (GUI), like it is used
for tour dispatching, with the ontology reasoner. Ev-
ery element of the GUI gets annotated with a specific
query, which gets invoked as soon as some GUI el-
ements get changed, respectively there is input data
available. So, if the dispatcher enters data in one GUI
field, the reasoner handles all queries tries to infer
data for all the other elements of the GUI. By this,
the options for one element can be restricted or even
incongruities derived if there is no valid option any-
more available.
In summary, the knowledge base is integrated into
three main aspects within the SCL architecture, as
shown in figure 8. These aspects cover all the exposed
requirements from the beginning of this section. First,
the knowledge base represents a specification of given
top-level domains in the field of logistics. The SCL
ontology especially describes electric driven aspects
as well as further legal dependencies. Secondly, the
knowledge base typifies a semantic layer for given
external conventional data models. And lastly, there
is a tight connection between a dispatching GUI, re-
spectively the elements of such a GUI, and ontology
queries.
6 DRIVER ASSISTANT CLIENT
One of the most important parts in such a holistic
system is the assistance of the driver. In a com-
plex socio-technical system where EVs are used for
inner-city logistic, the driver needs to cope with addi-
tional information (such as range, battery status, etc.)
in order to fulfil the main task of delivering goods.
To reduce stress and uncertainty resulting from these
additional important parameters, a DAC was devel-
oped and implemented as a prototype during the SCL
project. Basically, the DAC works as a navigation sys-
tem, providing optimized routes for EVs used in the
project, considering different range-affecting param-
eters of the EV (see chapter 4) while focussing on the
planned tour.
Since the DAC should assist the driver while driv-
ing and reduce the added complexity, it needs to be
easy-to-use in a vehicle. To find an optimal way to
support the driver two different horizontal prototypes
were developed at an early stage of the project.
Besides interviews with drivers and dispatchers,
we systematically evaluated the user acceptance and
usability of the DAC.
The main challenge was to meet with the partic-
ipants in selected companies because of restrictions
caused by standardized workflows and internal pro-
cedures. During the week there was almost no time
to interview more than a few drivers per day, that
made personal interviews or a supervised experimen-
tal setting inefficiently and costly. The alternative,
an unsupervised setting for testing the DAC and fill-
ing out the questionnaire raises methodological chal-
lenges (e.g. how to guarantee a similar experimen-
tal set-up for each participant). To address this prob-
lem, a contact person from the participating compa-
nies was provided with detailed instructions about
the experimental setting and a short 20-minute online
survey was elaborated. Several methods like access
codes, randomization and the analysis of metadata
(e.g. time-stamps and IP-addresses) that was stored in
our online-questionnaire, helped to address method-
ological concerns regarding the unsupervised setting.
In the beginning, each participant received an
impersonalized envelope with information about the
procedure and a unique access code from the contact
Intelligent Infrastructure for Last-mile and Short-distance Freight Transportation with Electric Vehicles in the Domain of Smart City Logistic
155
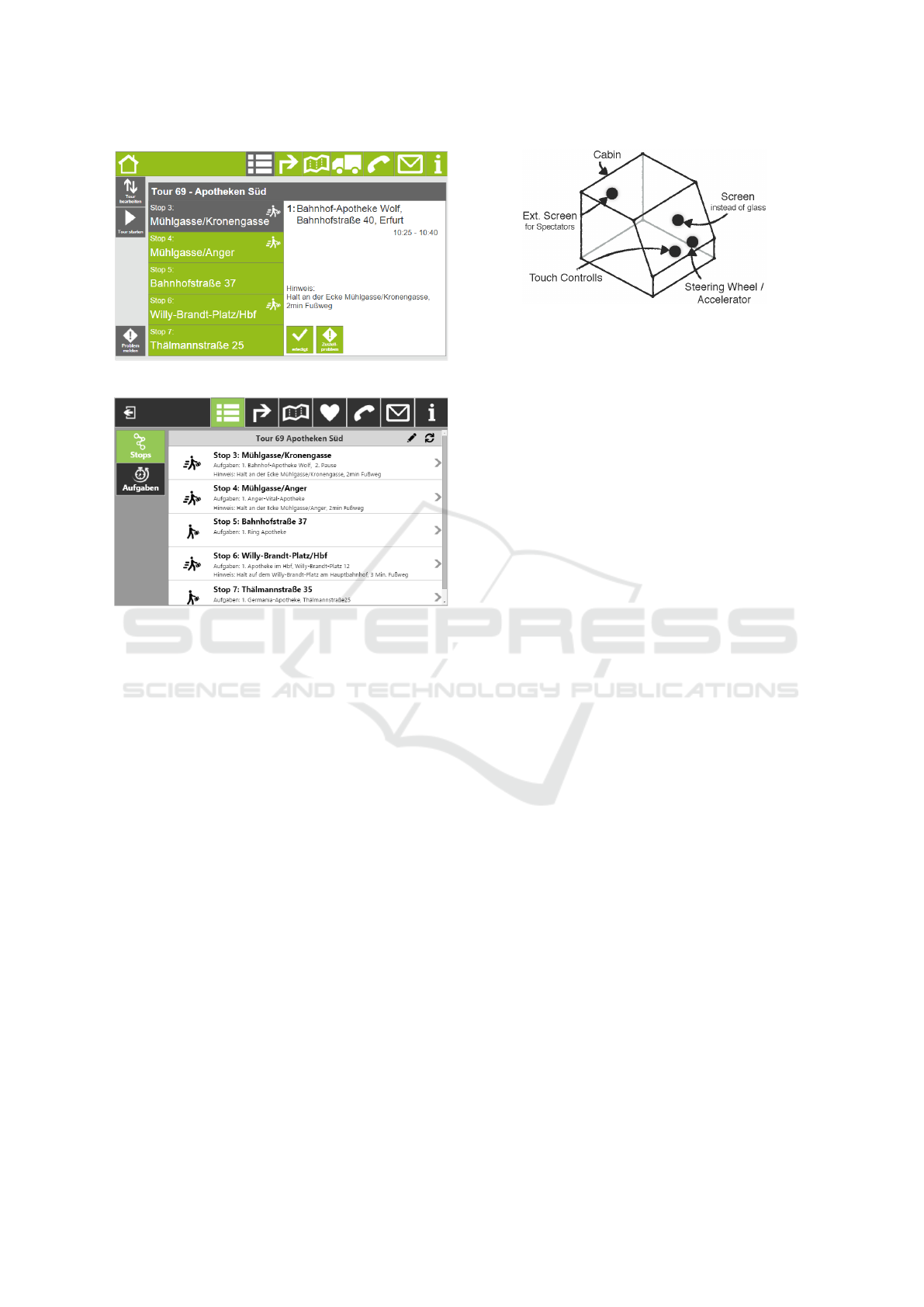
Figure 9: GUI prototype 1.
Figure 10: GUI prototype 2.
person in their company. Each participant had a per-
sonal computer with the online survey and a tablet
showing the prototypes in front of him. The access
code was needed to start the survey on the PC and the
first prototype (which was displayed in randomized
order) on the tablet. After answering some questions
concerning general and specific attitudes towards EV
and technological solutions in general, the participant
was asked to perform basic tasks using the prototype.
Based on this tasks, the participant had to answer
some questions regarding the functionality and the de-
sign of the prototype of the DAC. Finally, the partic-
ipant had to perform exactly the same steps also for
the second prototype, answering the same questions
as for the first one.
Except for general attitudes to EV and technol-
ogy at the beginning and demographic attributes at the
end, the questionnaire itself was created based on an
operationalization of the ISONORM 9241-110 stan-
dard (Pr
¨
umper, 2010; Pr
¨
umper, 1993) for software
evaluation, which has been adapted to the specific re-
search context. For each prototype, the participants
were asked to evaluate the adequateness, handling and
intuitiveness. The questions itself could be rated on
an ordinal scale with seven possible values between
”- - -” and ”+ + +”.
While analysing the dataset, the access code was
Figure 11: Eltrilo cabin schema.
used to assign the answers to the specifically eval-
uated prototype and to compare the answers on
a company-level without revealing the participants
identity. This procedure prevents a bias resulting from
the order of prototype evaluation. Each access code
could be used only one time. Additional security
was added through an encrypted connection to the
servers. Furthermore, the use of the online survey
system allows to exclude incomplete or corrupted an-
swers based on the time of completion of each seg-
ment and the participants IP-addresses.
Overall participating companies 43 participants
filled out the survey evaluating the two prototypes,
from which five could not be used because they were
not completed. Regarding the two prototypes, it
turned out, that none of them was evaluated better
than the other. Prototype 1 as shown in figure 9 ob-
tained better results regarding the usability while pro-
totype 2 as shown in figure 10 achieved better results
in clearness of the design and intuitiveness. Based
on this results a set of adaptation recommendations
was elaborated which basically combined the posi-
tive characteristics of both prototypes. Finally, this
set of adaptations has been used, to build the fully
functional prototype.
7 ELTRILO
Eltrilo is a cabin based on a former multi-purpose ve-
hicle Multicar, which is famous in city and pedestrian
areas. The cabin is fully featured with all equipment
for the everyday work in courier, express and parcel
area. But Eltrilo is not able to move. The cabin con-
tains a simulated SCL environment in which a driver
can process several orders. So in the background the
SCL architecture, range estimation model and knowl-
edge base is working. In the foreground the driver
interacts only with the DAC by driving in a simulated
city based on true roads with real-time position data.
Figure 11 presents the cabin schema. In front of
the driver, a huge flat screen is the new virtual glass
windshield. Besides the steering wheel, there are two
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
156
additional small screens which form the cockpit. The
cockpit touch screen allows to switch cabin equip-
ment like radio, air condition, lights et cetera on or
off. On the second screen, a navigation system and
the cabin state like velocity is accessible. The driver
assistance client is placed on top of the cockpit.
Entering the cabin the considered test drive is an
express order from a suburb to the city center deliv-
ering ice cream. Time for the order is around 5 min-
utes. In the beginning, there is an area to be familiar
with the EV. All the time a virtual assistant driver is
helping per voice. In the test drive, there is an aver-
age working day and no rush hour. On midway, the
weather pattern is changing. At the end of the trip, the
driver gets a report how to improve their next tour.
Every 500ms Eltrilo’s data logger writes a record
of position, energy consumption and four additional
parameters. Overall there are 10,822 trips with about
500 trip segments. So the entire data set contains
5,338,084 segments.
Processing the data set all segments with veloc-
ity zero are removed, and trip segment’s energy con-
sumption is normalized by distance. So the distance
parameter could be eliminated in the range estima-
tion model. Therefore, it is necessary to remove all
items with a distance less than 0.001. Otherwise, en-
ergy consumption scores absurd high. As a result,
5,097,588 segments remain.
The next data processing step is to eliminate high-
performance shifts in negative acceleration and en-
ergy consumption. Such shifts are produced by high-
velocity crashes hitting a snag. This step is done by
boxplot. That means for energy consumption items
89.4 percent are inside the interval [-19, 3, 32, 1] and
for acceleration items 90,1 percent are inside the in-
terval [-4, 5, 6, 9]. Thereby 564,198 segments are in-
applicable, and a data set of 4,533,390 items remains.
Now the adjusted data set is analyzed for parame-
ter loading and range estimation model parameter mix
dependency. Therefore, 200 trips are selected ran-
domly. The trip segments range between 113 and 645.
So on average a trip has 450 segments (overall trip av-
erage 420 segments). For the analysis, a Leave-One-
Out cross validation with k = n = 200 was applied.
Altogether, ten runs are processed split into two test
series (3 and 17 intervals). Each run-series starts with
all parameter for learn and test stage. Remaining runs
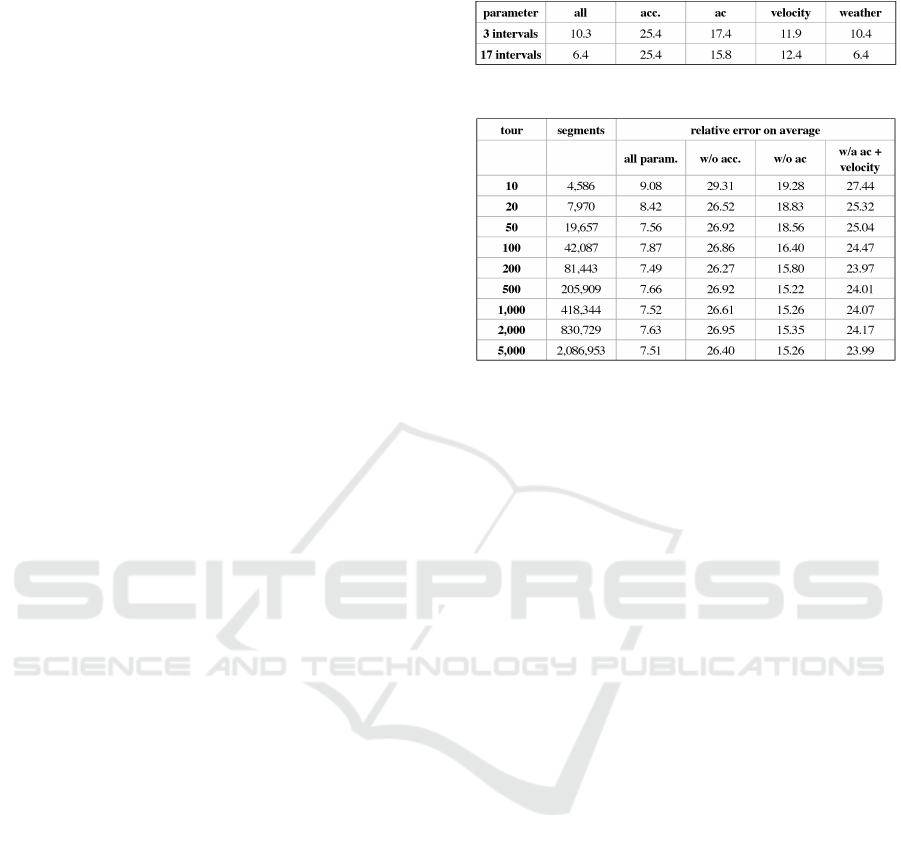
are done by one parameter missing. Table 1 presents
the parameter loading results.
That gets the following order of importance: (1)
acceleration, (2) air conditioning, (3) velocity and (4)
weather. For both runs, a missing weather parameter
is not significant for epsilon and maximum relative
error. In contrast, the remaining parameter (1) - (3)
Table 1: Relative error in parameter loading in percentage.
Table 2: Relative error on average in percentage.
have a strong influence on the overall result. Hence,
the weather parameter could be unattended for a bet-
ter calculation performance. That is crucial for the
second test series which provides good results. Unfor-
tunately, the learning process takes 65 percent longer
than the first test series. So it is to deliberate about
whether the increased computing time is worth it.
Therefore, the quantity of the learning data set is
crucial. To study the variation 10, 20, 50, 100, .., 5000
trips were selected randomly for learning data sets.
Thereby, it should be noted that a data set is a trip mix.
In a data set of 20 items, there are 10 trips from the
previous set and 10 additional trips (for 50 items 20
previous and 30 additional trips and so on). Further-
more, there is no overlapping between learning and
test data sets. So starting the test runs the model has
to be constructed by a learning data set. Then the rel-
ative error was detected for each test run. Table 2
presents the relative error on average.
As a result, the range estimation model converges
quickly even for small data sets. For the proposed
test drive the relative error with all parameters re-
mains around 7.5 percent. Additional data sets only
have a minor improvement for better quality. With-
out the loss of generality, the range estimation model
enters the target corridor with 200 trips for any param-
eter combination. Furthermore, the range estimation
model provides a reliable prediction of a learning data
set of 200 trips.
Figure 12 presents the energy consumption fore-
cast during a drive based on a learning data set of 200
items. For eight tours with different routes, the figure
shows the off between the prediction and the real en-
ergy consumption per trip segment.
So for the whole trip the real energy tightly fol-
lows the predictive consumption (12(a)). But at tour
starting prediction for single trip segments is really off
Intelligent Infrastructure for Last-mile and Short-distance Freight Transportation with Electric Vehicles in the Domain of Smart City Logistic
157

0 50 100 150 200 250 300
0 100 200 300
segments
engery consumption
real consumption
predicted consumption
(a)
0 50 100 150 200 250 300
0 20 40 60 80 100
segments
relative error in %
(b)
Figure 12: Prediction vs real energy consumption.
(12(b)) which is not significant because at the starting
point there only is minor total consumption. After
a high fluctuation phase, the relative error converges
straight to minor values.
8 CONCLUSIONS
SCL has implemented and installed the system as
shown. The first iteration for evaluation targets two
test scenarios to see those parts under realistic con-
ditions. One of these scenarios, realized by using an
acceptance test, tries to evaluate the interaction be-
tween driver and DAC. This test takes a closer look
at GUI layout, the amount of shown information and
usability. The results are used to optimized the DAC
and to fit drivers needs as best as possible. The sec-
ond scenario is focusing on data analyzes and getting
feedback about how exact the range estimation model
will work in case of different parameter sets and in
case of small, medium and large learning data sets. A
simulated scenario in combination with a huge num-
ber of drivers was used to show points of stagnation in
growing data sets and the possibility to adjust the rela-
tive error by using different kind of parameters which
influences the range.
The realized tests have shown some weak points.
As seen in the acceptance tests participant can get
in problems about appreciation in case of descriptive
scenario simulations. They have to suggest the logis-
tic scenario by adapting the instructions and answer
through related questions about usability and client
acceptance. Unfortunately, it’s hard to use EVs and
corresponding hardware installations in large scales
to create test situations as realistic as possible. Apart
from that, tests within the Eltrilo cabin produces data
as required and can be modified to match any logis-
tic scenario. The realistic visualization and handling
within this cabin helps participants navigate those
scenarios and proceed as normal. Those tests don’t
compensate the real test beds which has to be done
within SCL as well. The simulated environment help
to integrate a larger amount of participants than the
test bed could yield.
Concerning the integration of knowledge base
technologies, there are still open issues regarding the
particular description language or logics specifica-
tion. By now, we implemented the runtime assis-
tance in the form of a Prolog rule base. The thereby
implied closed world reasoning results in a good ap-
plicability of the knowledge base assistance, as well
as a well-anticipated scalability with the integration
of large databases. But the expressiveness of Prolog
is really limited regarding the use of full description
logic ontology used as top level domains. So by now,
there is some kind of semantic gap between the con-
ceptual description of higher ontologies and the until
now used Prolog logic rule base. We will try to narrow
this gap by testing the implementation of DL ontolo-
gies and open world based reasoning without losing
the functionality, applicability and scalability.
The results about architectural drafts, analysed re-
lated projects, as well as embedded existing system
landscapes in combination to the range estimation
model and knowledge base for this particular domain,
will be transferred into a reference architecture. This
architectural documentation should help to design and
implement future systems which have to be used in
addition to existing logistic systems. Using a refer-
ence architecture within related projects can help to
get more EVs until 2020 as intended by the German
national development plan for electro mobility.
ACKNOWLEDGEMENTS
We would like to thank all members of the SCL re-
search team here at FSU Jena – there are too many to
name them all in person. We would also like to ex-
tend our gratitude to our partners within the research
consortium, end users as well as research institutions
and industrial developers. This project is supported
by the German Federal Ministry for Economic Affairs
and Energy in the IKT-II fur Elektromobilitat program
under grant 01ME121(-33).
REFERENCES
Anand, N., Yang, M., van Duin, J., and Tavasszy, L. (2012).
Genclon: An ontology for city logistics. Expert Sys-
tems with Applications, 39(15):11944 – 11960.
Apel, S., Schau, V., and Rossak, W. (2015a). Darstel-
lung branchentypischer Abl
¨
aufe und Wechselwirkun-
gen in der innerst
¨
adtischen logistik. Technical Re-
port Math/Inf/06/2015, Friedrich-Schiller- Univer-
sit
¨
at Jena, Institut f
¨
ur Informatik, Jena, Germany.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
158

Apel, S., Schau, V., and Rossak, W. (2015b).
Gesch
¨
aftsprozesse der innerst
¨
adtischen Logistik,
Modellierung von allgemeinen Gesch
¨
aftsprozesse.
Technical Report Math/Inf/05/2015, Friedrich-
Schiller-Universit
¨
at Jena, Institut f
¨
ur Informatik,
Jena, Germany.
Arnold, D., H.Isermann, Kuhn, A., and Tempelmeier, H.
(2002). Handbuch Logistik. Springer, Berlin.
Beikirch, S. (2015). Mit Blaulicht und Schokolade.
Internet, http://144.76.35.217/joomla/media/OTZ 11.
03.2014 mit-blaulicht-und-schokolade.pdf, visited
2015-10-21.
Bundesregierung Deutschland (2012). NEP Elektromo-
bilit
¨
at. Internet, http://www.bundesregierung.de/
Content/DE/Infodienst/2012/10/2012-10-12-elektro
mobilitaet/2012-10-12-elektromobilitaet.html, visited
2015-10-21.
Bundesregierung Deutschland (2013). IKT f
¨
ur Elektro-
mobilit
¨
at II. Internet, http://www.bmwi.de/BMWi/
Redaktion/PDF/Publikationen/Technologie-und-
Innovation/ikt-elektromobilitaet,property=pdf,bereich
=bmwi2012,sprache=de,rwb=true.pdf, visited 2015-
10-21.
Busch, A., Dangelmair, W., Pape, U., and R
¨
uther, M.
(2003). Marktspiegel Supply Chain Management Sys-
teme. Gabler, Wiesbaden.
Buschmann, F., Meunier, R., Rohnert, H., Sommerlad, P.,
and Stal, M. (1996). A System of Patterns, Pattern-
Oriented Software Architecture. John Wiley and Sons.
Chappell, D. (2004). Enterprise Service Bus. O’Reilly Se-
ries. O’Reilly Media, Incorporated.
Chopra, S. and Meindl, P. (2007). Supply Chain Manage-
ment, volume 3. Pearson Education, New Jersey.
Conradi, P. (2012). Reichweitenprognose f
¨
ur Elektromo-
bile. In ATZelektronik, volume 7.
DAKO (2015). Website for the SCL project. http://
smartcitylogistik.de, visited 2015-10-21.
EnBW (2015). iZEUS - Projektziele - intelligent zero
emission urban system. Internet, http://www.izeus.de/
projekt/beschreibung-ziele.html, visited 2015-10-21.
Faber, A. and Ammerschuber, O. (2007). Transporte im
Griff. Logistik Heute, pages 35–37.
Gamma, E., R.Helm, Johnson, R., and Vlissides, J.
(1994). Design Patterns: Elements of Reusable
Object-Oriented Software. Addison-Wesley Profes-
sional, 1 edition.
Gebhardt, K., Schau, V., and Rossak, W. (2015). Applying
stochastic methods for range prediction in e-mobility.
In 15th International Conference on Innovations for
Community Services, Nuremberg, Germany.
INNOMAN (2015). Projektidee. http://www.smobility.net/
idee, visited 2015-10-21.
ISO/IEC JTC 1 (1994). ISO 7498-1: Information technol-
ogy - Open Systems Interconnection - Basic Reference
Model, 1 edition.
Jinbing, H., Youna, W., and Ying, J. (2008). Logistics
decision-making support system based on ontology. In
Computational Intelligence and Design, 2008. ISCID
’08. International Symposium on, volume 1, pages
309–312.
Lian, P., Park, D.-W., and Kwon, H.-C. (2007). Design of
logistics ontology for semantic representing of situa-
tion in logistics. In Digital Media and its Application
in Museum Heritages, Second Workshop on, pages
432–437.
Logistik Heute (2005). Die Qual der Wahl. Logistik Heute,
pages 36–37.
Navimatix (2015). Website for the eTelematik project.
http://www.etelematik.de, visited 2015-10-21.
Ondruska, P. and Posner, I. (2014). The Route Not Taken:
Driver-Centric Estimation of Electric Vehicle Range.
In 24th International Conference on Automated Plan-
ning and Scheduling, Portsmouth, NH, USA.
Pirron, J., Kulow, B., Hellingrath, B., and Laakmann, F.
(1999). Markt
¨
ubersicht SCM-Software. Logistik
Heute, pages 69–75.
Prinz, T., Kretzschmar, J., and Schau, V. (2015). A knowl-
edge base for electric vehicles in inner-city logistics.
The Tenth International Conference on Software En-
gineering Advances (ICSEA).
Pr
¨
umper, J. (1993). Die Evaluation von Software
auf Grundlage des Entwurfs zur internationalen
Ergonomie-Norm ISO 9241 Teil 10 als Beitrag zur
partizipativen Systemgestaltung - ein Fallbeispiel.
Teubner Verlag, Stuttgart.
Pr
¨
umper, J. (2010). ISONORM 9241/110-S: Evaluation
of software based upon International Standard ISO
9241, Part 110. HTW Berlin. Manuscript Question-
naire.
Schau, V., Rossak, W., Hempel, H., and Sp
¨
athe, S. (2015).
Smart city logistik erfurt (scl): Ict support for manag-
ing fully electric vehicles in the domain of inner city
freight traffic. In Proceedings of the 2015 Interna-
tional Conference on Industrial Engineering and Op-
erations Management, Dubai (UAE).
Technische Hochschule Deggendorf (2015). E-WALD
news - Technische Hochschule Deggendorf.
https://www.th-deg.de/de/forschung/projekte/e-wald/
e-wald-news#nav, visited 2015-10-21.
VISPIRON CARSYNC (2015). Website for the ACM
project. http://www.adaptive-city-mobility.de, visited
2015-10-21.
Intelligent Infrastructure for Last-mile and Short-distance Freight Transportation with Electric Vehicles in the Domain of Smart City Logistic
159
