
A Novel Technique for Point-wise Surface Normal Estimation
Daniel Barath
1,2
and Ivan Eichhardt
1,2
1
MTA SZTAKI, Budapest, Hungary
2
E
¨
otv
¨
os Lor
´
and University, Budapest, Hungary
Keywords:
Surface Normal Estimation, Affine Transformation, Stereo Reconstruction, Oriented Point Cloud, Planar
Patch.
Abstract:
Nowadays multi-view stereo reconstruction algorithms can achieve impressive results using many views of
the scene. Our primary objective is to robustly extract more information about the underlying surface from
fewer images. We present a method for point-wise surface normal and tangent plane estimation in stereo
case to reconstruct real-world scenes. The proposed algorithm works for general camera model, however, we
choose the pinhole-camera in order to demonstrate its efficiency. The presented method uses particle swarm
optimization under geometric and epipolar constraints in order to achieve suitable speed and quality. An
oriented point cloud is generated using a single point correspondence for each oriented 3D point and a cost
function based on photo-consistency. It can straightforwardly be extended to multi-view reconstruction. Our
method is validated in both synthesized and real tests. The proposed algorithm is compared to one of the
state-of-the-art patch-based multi-view reconstruction algorithms.
1 INTRODUCTION
Estimation of surface normal and the related planar
patch has been an intensively researched area of com-
puter vision since decades. The aim of this paper is
to define a method and describe the theory behind, to
estimate planar-like spatial patches (surflets) for each
point correspondence in stereo case. We will show
that the proposed method can achieve more accurate
results in many cases than standard estimation tech-
niques, and it will be a powerful basis for subsequent
dense reconstruction algorithms. In our experience,
most of the sparse or dense reconstruction methods
estimate the spatial positions of the observed points
accurately, but they give rough estimations for the
patch orientations (the surface normals) most of the
time. This motivated our current work.
The algorithm assumes that 2D correspondences
(2D point pairs) are already established between im-
ages of a stereo pair. The calibration of the cameras
in the stereo setup should also be known. We assume
that the observed corresponding point pair belongs to
the same surflet. After triangulating the position of
this observed point from the known 2D point corre-
spondences, our algorithm further provides informa-
tion about the underlying surface: the tangent plane at
the point. The output of our algorithm is an oriented
point cloud, a sparse reconstruction of the scene.
1.1 Related Work
Stereo matching and reconstruction methods can be
classified into four different classes, based on their
applied model for the surface: voxel-based (Faugeras
and Keriven, 2002; Pons et al., 2007), deformable
polygonal (Zaharescu et al., 2007), depth-map fusion
(Strecha et al., 2006) and patch-based (Furukawa and
Ponce, 2010; Habbecke and Kobbelt, 2007) methods.
Since ours is patch-based, in the rest of the related
work we restrict ourselves to this class of methods.
Each patch is built from a local area and the tan-
gent plane of the surface. The tangent plane estima-
tion can be performed directly or indirectly. Direct
parametrization of a cost function with the parameters
of the tangent plane is an algebraic problem, where
the solution is the minimum of the cost function. Indi-
rectly, when a relative (affine) homography is first es-
timated between the projections of the 3D surflet, the
parameters of the tangent plane (and the surface nor-
mal) are expressed from this relation (Faugeras and
Lustman, 1988). Applied number of views and the na-
ture of the reconstruction (dense or sparse) may vary
among the direct or indirect methods.
Such an indirect approach is the work of
(Megyesi et al., 2006). Their method requires rec-
tified images to compute the scene structure in two
steps. It first generates seed points using affine patch-
688
Barath, D. and Eichhardt, I.
A Novel Technique for Point-wise Surface Normal Estimation.
DOI: 10.5220/0005776406860693
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 688-695
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

matching, then propagates the estimated surface un-
der a set of conditions. On the seed points they use
exhaustive search (ES) to find an optimal 3-DoF affine
transformation between patches of the rectified views
based on a photo-consistency measure first, then the
decomposition of these transformations results in sur-
face normals and disparity. The authors introduce
several epipolar geometry-based constraints in order
to narrow the search-space. Their normal visibility
constraint declares that normals pointing away from
the image planes or close to perpendicular to the prin-
cipal axis can be discarded.
There are several image-based surface nor-
mal estimation methods available, such as affine
transformation-based technique (Barath et al., 2015)
or decomposition of the homography (Faugeras
and Lustman, 1988). The study of (Moln
´
ar and
Chetverikov, 2014) also showed that the surface nor-
mal can be expressed directly from the affine homog-
raphy using the spatial gradients of the 2D projective
functions in the stereo setup. These approaches re-
quire full camera calibration and the (affine) homog-
raphy related to the observed point pair.
Some other methods (Habbecke and Kobbelt,
2006; Furukawa and Ponce, 2010; Lhuillier and
Quan, 2005; Vu et al., 2012) can be classified as di-
rect methods for tangent plane estimation. In the
work of (Habbecke and Kobbelt, 2006), the authors
pose the problem as a plane search in 3D space. This
is similar to our approach, but unlike us, they work
with matched 2D blobs, and the proposed solution
optimizes the plane through 3 parameters. Gauss-
Newton optimization with a photo-consistency-based
cost function is used to solve the problem.
From the field of multi-view dense reconstruction
we have to mention PMVS (Furukawa and Ponce,
2010). Their method is a patch-based 3-step – match,
expand and filter – procedure generating an oriented
point cloud (or patches), where the last two steps are
repeated n times. Matching is based on minimizing
a photometric discrepancy function, therefore, they
also optimize in both spatial and image space. Af-
ter initial matching, for patch optimization they use a
gradient method to refine the orientation. In the fil-
tering step the authors use a weak form of regular-
ization, where they apply visibility-based constraints
to eliminate incorrect matches and outliers. These
constraints show similarities to (Megyesi et al., 2006)
and to our approach, but in our method similar con-
straints are directly applied to the search space, not
as a post-processing step. The expansion step can be
related to the surface propagation step of (Megyesi
et al., 2006). As a final step, of PMVS they also
generate a polygonal mesh through Poisson Surface
Reconstruction (Kazhdan et al., 2006) and an Itera-
tive Snapping step. In the latter, they enforce fore-
ground/background segmentation through energy op-
timization. The weakness of this method comes from
initialization of the surface normal (which prefers
fronto-parallel patches). As the patch orientation
moves away from fronto-parallel, the result of the gra-
dient method gets worse.
There are also a number of multi-step pipelines
working on massive number of views (Lhuillier and
Quan, 2005; Vu et al., 2012) to achieve high-quality
reconstruction. Their first step is usually a crucial
one: building an initial sparse or quasi-dense recon-
struction of the scene (e.g. oriented point cloud).
Particle Swarm Optimization (PSO) (Kennedy,
2010; Shi and Eberhart, 1998) is a population-based
algorithm, designed to find useful solutions for con-
tinuous problems in a bounded (or periodic) search
space. It is an iterative algorithm trying to find and
improve candidate solutions. Multiple particles coop-
erate seeking one or multiple optima simultaneously.
PSO is derivative-free and copes well with noise.
1.2 Motivation and Goals
Establishing correspondences between stereo (or
multi-view) images is an ambiguous, the reconstruc-
tion of the underlying surface an ill-posed problem.
There are a number of methods applying constraints
and using several views to restrict the problem.
In this paper, we use a direct approach and formu-
late affine patch-matching in such a way that the 2-
DoF search space is the same as the parameter space
of the surface normal of the corresponding surflet.
We preferred using PSO since unlike Gauss-Newton
methods, it attempts finding a global optimum with-
out derivatives. However, PSO has – in general – no
proof of convergence, in our formulation the quality
of the estimated tangent plane is at least as good as
if we used a coarse regular grid-based ES. Using the
epipolar geometry and direct constraints on the search
space, our algorithm opens up a novel way to address
high quality reconstruction from photos taken from
uncalibrated viewpoints.
This paper and also the algorithm do not deal with
full reconstruction. It focuses on individual tangent
plane estimation in order to provide a basis for a fu-
ture multi-view reconstruction algorithm. Potential
applications are in the field of 3D reconstruction: gen-
erating seed points for surface-propagation, enhanc-
ing motion-from-structure in a multi-view setup.
Even though, the commonly used warp function is
homography for similar tasks, we chose affine trans-
formation. The benefit of building an affine transfor-
A Novel Technique for Point-wise Surface Normal Estimation
689

mation from projection function gradients is, that it
is valid for any camera model. We already discussed
the simple pinhole-camera based formulation, but e.g.
extending the pinhole camera model and its projection
function with radial and tangential distortion gives the
following advantages.
1. No undistortion of input photos is needed.
2. When warping image patches, no evaluation of
camera distortion is needed for each pixel. The
affine warp matrix is pre-evaluated, thus trans-
forming the patch is a fast affine image warp.
3. The extension to (not discussed here) omnidirec-
tional cameras is also simple.
Although our affine matching-based algorithm resem-
bles the seed point generation step of different method
(Megyesi et al., 2006) with ES, due to our novel for-
mulation of the matching problem, we are able to
substitute ES with a search heuristic (PSO), and no
rectification of the input images is needed. Remark
that the estimation of the affine transformation in their
work has 3-DoF since the images are rectified before-
hand. To our knowledge, applying PSO to reconstruc-
tion problems (Cagnoni, 2008) such as the topic of
this paper is new. Also, novel visibility constraints
dramatically restrict the search space of PSO.
We performed experiments on synthetic and real
data and compared our results to a state-of-the-art
method (Furukawa and Ponce, 2010) applied on a
stereo image pair as it can be seen in Sec. 4.1.1.
Poisson surface reconstruction (Kazhdan et al., 2006)
of the output of our method gives satisfactory qual-
ity without any post-processing or surface propaga-
tion (Megyesi et al., 2006) techniques.
The rest of this study is organized as follows: the
Sec. 2 describes the notations used in this paper and
the geometric background. Then, in Sec. 3 the core
of the proposed algorithm is written in the form of its
geometric representation and with novel constraints
on the search space, as well. Finally, in Sec. 4 we
show that our algorithm works well in synthetic and
real tests, and we conclude our research in Sec. 5.
2 NOTATIONS AND GEOMETRIC
BACKGROUND
In this work matrices are denoted by bold capitals
such as K or R, and vectors are underlined such as
T
, p, q, x. In addition, the notation P usually means a
point in 3D, p is usually a 2D projection on an image
plane and its homogeneous equivalent is ˜p.
The projection matrix of the perspective camera
model is denoted as P = K ·
R | T
∈ R
3×4
, and
Figure 1: Surface point with normal vector and tangent
plane.
constructed using the matrix of intrinsic camera pa-
rameters K ∈ R
3×3
, rotation matrix R ∈ R
3×3
and
translation vector T .
Conversion of a direction x ∈ R
3
to Spher-
ical coordinates is expressed as Sph (x) =
h
arccos
Z
k
x
k
arctan
2
(Y, X)
i
T
.
Let a, b ∈ R
2
, such that ∀i ∈
{
1, 2
}
: a
i
≤ b
i
,
then rect [a, b] is the minimum (axis-aligned) rectan-
gle containing vectors a and b.
3 ITERATIVE TANGENT PLANE
ESTIMATION
In this section we show that the normal vector
can be robustly estimated from only a single point-
correspondence, and its local environments on the
first, and the second images. Let us denote the pro-
posed method with ITPE in the latter sections.
3.1 Basis of the Algorithm
The main idea behind the proposed algorithm is very
simple: if a point of a surface is given, the tangent
plane of the observed point can be described by the
normal vector of the plane as it can be seen in Fig. 1.
It means exactly that the DoF of this plane is two since
it can be parametrized by spherical coordinates (u, v)
(omitting the third, radial coordinate). Let us denote
the stereo camera setup with the projection matrices
of the cameras P
1
, P
2
, and the i
th
3D point with
˜
P
i
in
homogeneous form. Its projections on the two cam-
eras are p
i
1
, p
i
2
. Now the tangent plane of the ob-
served point can be defined by the point and normal
n. The problem is reduced to a two-dimensional box-
constrained optimization, where the unknown param-
eters are u and v; therefore it always has a solution.
In order to choose the best candidate surface nor-
mal we use weighted zero-mean normalized cross-
correlation (ZNCC) (Martin and Crowley, 1995) with
Gaussian weights as similarity applied on the pixels
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
690

of the vicinity of the projections of P
i
. Although the
commonly used technique is to transform the pixels of
the patch with the homography, we use its derivative
in points p
i
1
, p
i
2
: the affine transformation (Eq. 2). In
our experience it gives more accurate results in real
scenes (see Table 1) and it is valid for every camera
model. Basically, the algorithm solves an optimiza-
tion problem, maximizing:
Λ
1
(u, v) = ZNCC
h
τ
p
1
◦A(u, v), τ
p
2
i
(1)
The expression τ
p
j
and operator ◦ denotes a local en-
vironment of point p
j
(a sub-pixel patch extracted
from the image) and the application of an affine trans-
formation matrix (warping the patch), respectively.
Function A in Eq. 2 deduced from the pioneering for-
mulation of (Moln
´
ar and Chetverikov, 2014) calcu-
lates the affine transformation related to each (u, v)-
parametrized surface normal:
A(u, v) =
1
|
∇x
1
n∇y
1
|
|
n∇y
1
∇x
2
| |
n∇x
2
∇x
1
|
|
n∇y
1
∇y
2
| |
n∇y
2
∇x
1
|
(2)
Using the following derivative forms
∇x
i
=
1
s
i
P
i
|
(1,1:3)
− x
i
· P
i
|
(3,1:3)
∇y
i
=
1
s
i
P
i
|
(2,1:3)
− y
i
· P
i
|
(3,1:3)
s
i
= P
i
|
(3,1:4)
·
P
1
(3)
where
|
abc
|
is the triple product of three vectors
a, b, c ∈ R
3
and P
i
|
(k, l:m)
denotes the sub-matrix of
P
i
from row k and columns l to m. The surface nor-
mal n from parameters u, v is as follows:
n =
cos(u)sin(v) sin(u) sin (v) cos (v)
T
(4)
To summarize, Eq. 1 maximizes the similarity of the
transformed environment in the first image, and the
original one in the second image with respect to the
surface normal. The problem itself seems to be a sim-
ple parameter search, but due the ambiguity of the
affine transformation and the deficiencies of photo-
consistency several constraints have to be added to the
system in order to make it more robust. Remark that
due to the symmetrical nature of this problem the pro-
posed cost function can be completed by applying the
inverse affine transformation to the second patch.
Λ
2
(u, v) = ZNCC
h
τ
p
1
, τ
p
2
◦A(u, v)
−1
i
(5)
Finally, one can compute the best-fitting normal using
the following combined cost function:
J
00
= arg
(u,v)
max(Λ
1
(u, v)Λ
2
(u, v)) (6)
In our experience Gaussian weighting of the correla-
tion improves the reconstruction.
3.2 Constraints on the Search-space
As it can be seen in the previous section, in order
to achieve high-quality reconstruction a series of new
constraints have to be introduced.
3.2.1 Visibility constraint
We can formulate several geometric constraints on
our global optimization process, since the 2-DoF
search space of the optimal patch is the (u, v) point
in spherical coordinates of the corresponding surface
normal. The following points introduce (multi-view)
visibility-based constraints on the parameter space
and the optimization process.
1. Our first boundary constraint utilizes the periodic
nature of the spherical coordinates:
u ∈
h
u
0
−
π
2
, u
0
+
π
2
i
v ∈
v
0
− π, v
0
+ π
(7)
where
u
0
, v
0
= Sph(w) and w
:
= −
K
−1
˜p
k
K
−1
˜p
k
2
, a
direction towards the viewpoint. In general,
u
0
i
, v
0
i
= Sph (w
i
) = Sph
−R
T
i
K
−1
i
˜p
i
(8)
2. Since a tangent plane not facing the viewer is un-
interesting, the search space can be halved:
v ∈
h
v
0
−
π
2
, v
0
+
π
2
i
(9)
3. This area can be interpreted as an axis-aligned
rectangle in the spherical coordinate system
spanning from a
0
=
u
0
−
π
2
, v
0
−
π
2
to b
0
=
u
0
+
π
2
, v
0
+
π
2
. Let us denote such rectangles
as rect
i
:
= rect
a
i
, b
i
for a given view i. Assum-
ing we have multiple views of the patch, taking
the intersections of rect
i
of all i restricts the search
space further.
rect
min
u,v
, max
u,v
:
= ∩
i
(rect
i
) (10)
The search space can be restricted to the size of a
minimal rectangle with both sides equal to
π
2
. The
search space cannot be restricted more. The fol-
lowing point unfolds this phenomenon while for-
mulating the last geometric constraint.
4. However, if there exists a viewpoint with index j,
where
u
0
j
, v
0
j
/∈ rect [min
u,v
, max
u,v
] the search
space is empty.
∃ j :
u
0
j
, v
0
j
/∈ rect
min
u,v
, max
u,v
⇐⇒
∃ j∃i :
u
0
j
, v
0
j
/∈ rect
i
⇐⇒
∃ j∃i :
w
j
, w
i
< 0 (11)
A Novel Technique for Point-wise Surface Normal Estimation
691
This means that the angle between two view direc-
tions is greater than
π
2
, implying that one or more
viewpoints are outliers.
5. By slightly extending the bounds of rect
i
, the error
of the calibration can be accounted for.
3.2.2 Epipolar Constraint on Affine
Transformation
As it was mentioned before, not the homography
is applied on the vicinity of the projected point,
but the derived affine transformation. In order to
use epipolar-geometry-based constraints a new affine
model has to be introduced. Let us denote the affine
transformation related to the i-th point-pair with
A
i
=
a
i
11
a
i
12
a
i
21
a
i
22
= R
i
−β
· W
i
· S
i
· R
i
β
· R
i
α
(12)
Matrices W
i
,S
i
,R
i
−β
,R
i
β
,R
i
α
are shear, scale and ro-
tations by angles−β, β, α, respectively. α is the angle
between the epipolar lines on the first, and the second
images that the observed point-pair lies on. β is the
steepness of the epipolar line on the second image. In
summary, this model contains the shear and scale as
they are applied parallel to epipolar lines.
It is obvious that due to the nature of perspective
projection, mirroring is not allowed (det
A
i
> 0).
Other restrictions can be made: exclude extremely
low scale, and high shear factors as well. In our ex-
perience suitable lower bound to the scale and for the
upper bound to the shear are 0.2 and 2.0, respectively.
3.3 Global Optimization
In our formulation the cost function needs to be min-
imized on a global scale restricted by the geometric
constraints as described in Eq. (10). It is not contin-
uous since we exclude certain affine transformations
(see 3.2.2) and is very noisy due to interpolation and
the discrete nature of digital images. Performing an
ES on the whole parameter space is an option, which
gives satisfactory quality, but it is slow.
Our approach was to use PSO, running the itera-
tive algorithm until the average change rate of can-
didate solutions is less than a threshold θ in k suc-
cessive steps. In our experiments we used 10
−9
and
5, respectively. The swarm is initialized to cover the
whole search space like nodes on a uniform grid. Ran-
dom connections are established between them. This
method turned out to be fast and accurate. It is nearly
as accurate as an ES-approach and is much faster (see
Table 2).
The maximum number of particles used was
n
max
= 100 in our tests, but we adaptively decreased
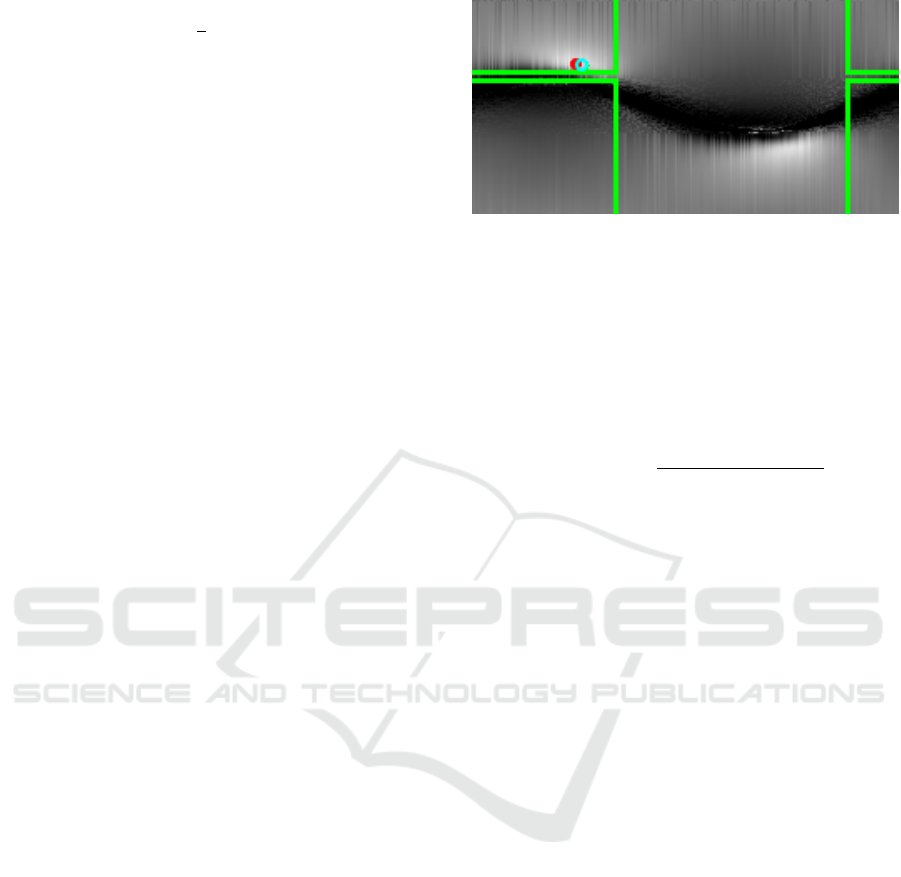
Figure 2: Measurement surface of an experiment on real
data. The horizontal and vertical axis are the u, and v pa-
rameters, respectively. Cropped green rectangle are the area
defined by the visibility constraint. Cropping is because of
the periodicity of the parameter space. Red and blue dots
are the global optimum determined by exhaustive search on
the full parameter space and the result of PSO, respectively.
number n
opt
as the search area shrinks (see section
3.2.1).
n
opt
:
= min
4,
100
|
rect[min
u,v
, max
u,v
]
|
π
2
(13)
where
|
rect
|
is the area of the rectangle. This gave a
mild drop in running times, without losing accuracy.
Fig. 2 shows the measurement surface of an ex-
periment on real data. The horizontal and vertical axis
are parameters u, and v, respectively. Therefore, the
coordinates of top-left, and bottom-right points de-
note [0,0]
T
, and [2π,π]
T
, respectively. The cropped
green rectangle encapsulates the area defined by the
visibility constraint. (Note the periodicity of the pa-
rameter space.) Red and blue dots are the global op-
timum determined by ES on the full parameter space
and the result of PSO, respectively. As it is expected,
the remaining search space contains the global opti-
mum. The resulting coordinate pair (blue dot) are
close to the expected one. There is a gap of invalid
(black) values in the middle, which is caused by the
constraints based on Eq. 12. Thereby, several val-
ues are simply ommited, which are represented by
similarity value 0. It can be seen, that the similarity
function is not convex due to the two peaks, and the
black constant region. Remark that our preliminary
experiments showed, that the ommited area also con-
tains high peaks, even so, the surface normal is invalid
there. Unfortunately, gradient descent is not a valid
solution for that problem, since the region encapsu-
lated by the visibility rectangle is not convex either.
4 TESTS
In this section we show that the proposed method
works well on semi-synthesized tests and real-world
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
692

photos. Unless otherwise noted we used s = 70 for
2D patch sizes and σ =
s
2
for the Gaussian.
4.1 Semi-synthesized Tests
Three type of well-textured synthetic scenes were
generated using Processing
1
: a unit sphere, a unit-
edge cube, and a complex scene. This scene consists
of two perpedicual planes, a cylinder, a sphere, and
a parametric surface. The intrinsic and the extrin-
sic parameters of the camera setups were known, as
well. We took screenshots of the scenes from differ-
ent viewpoints (see Fig. 3). In order to get feature
points, ASIFT feature matcher (Yu and Morel, 2009)
was applied. Then the proposed algorithm ran on each
point pair, in order to compute the surflets. The com-
puted error value is the average angular error of the
surface normals w.r.t. the ground truth ones.
Fig. 3 shows two views of “Sphere”, “Cube”, and
“Complex” test scenes.
2
For the sake of comparison,
we reconstructed the scene by PMVS (Furukawa and
Ponce, 2010) and the standard LS Plane (Hoppe et al.,
1992) algorithm was also applied, in order to estimate
surface normals from the raw point clouds.
In Table 1, four methods are evaluated: ITPE-
PSO, ITPE-ES, PMVS and LS Plane. It is visible that
our method (ITPE-PSO) achieves smaller than 6.5°
average angular error in every test case, and the me-
dian errors are also below 3.5°, 1.2°, and 3.5° for the
sphere, cube and complex scenes, respectively. This
means that in the case of the cube, half of the surface
normals are closer to the ground truth than 1.2°. It is
also shown that the results of the rival methods are ap-
proximately three, ten, and two times less accurate in
the three cases. In Table 2 processing times of ITPE-
PSO, ITPE-ES methods are shown. It is apparent that
ITPE-PSO gives almost the same results as ITPE-ES
(Table 1), even so it is is ten times faster (Table 2).
Synthesized tests show that the proposed algo-
rithm works well and its processing time is low. As
it can be seen in Table 1, the average angular error of
the estimated surface normal in sphere and cube tests
are 5.5° and 2.09°, respectively. This result is consid-
erable given per-point estimation.
4.1.1 Free-form Surfaces
The proposed algorithm is also applied to real pho-
tos we acquired by handheld cameras. We assume
1
https://processing.org/
2
3D reconstruction results are visualized in (Cignoni
et al., 2008). The test environment was a notebook with
an Intel(R) Core(TM) i7-3610QM CPU at 2.30GHz, with 8
cores and 8192MB of RAM.
Figure 3: Input stereo image pairs of the synthetic tests.
The first, second and third rows show the input of test cases
“Sphere”, “Cube” and “Complex”, respectively.
that the intrinsic parameters are known. The relative
pose of the setup is recovered (Bradski et al., 2000)
from the Essential matrix, which is calculated from
the Fundamental matrix (F). F is estimated from cor-
responding ASIFT (Morel and Yu, 2009) point pairs.
Then ITPE-PSO method was applied to each point
pair. In order to validate the results, we performed
Poisson reconstruction (Kazhdan et al., 2006) of the
3D point clouds and the related normals.
Fig. 4 consists of photos of a textured bear (honey
bottle) with high curvatures. The first two images are
the stereo image pair that was used during the normal
reconstruction. The last two images are two views of
the reconstructed surface. As it can be seen our algo-
rithm accurately follows the shape of the observed ob-
ject even though the estimation is point-wise, it takes
only the local features into consideration. The quality
of the reconstruction is the best observed around the
nose of the bear from a side-wise view. The result is
much better than MeshLab LS Plane implementation
even though the curvature is high.
For the sake of comparison, we used PMVS
3
(Fu-
3
http://ccwu.me/vsfm (application available online)
A Novel Technique for Point-wise Surface Normal Estimation
693
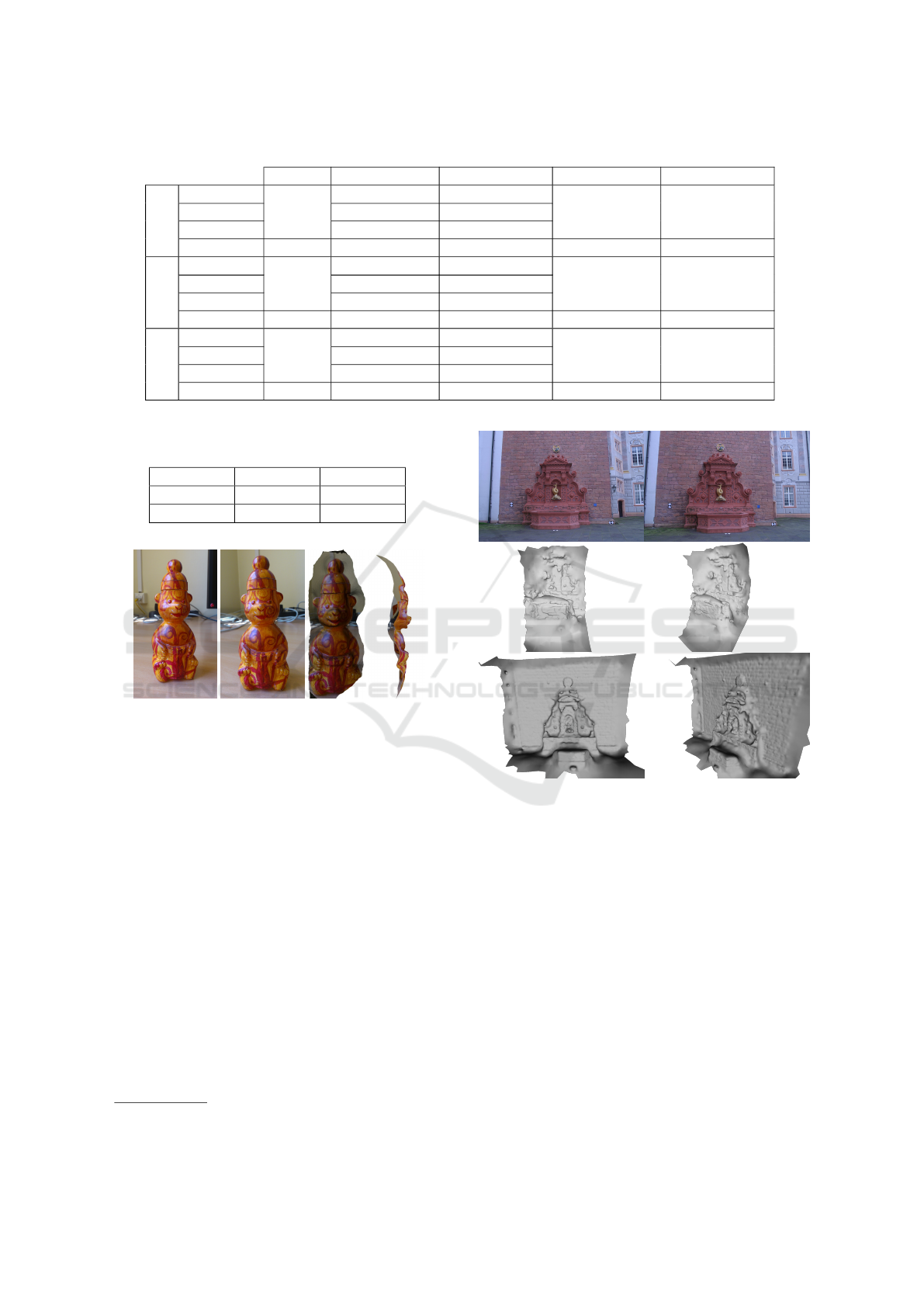
Table 1: Estimation results with σ = 50 and window size is 100 px.
#points Avg. ang. err. Med. ang. err. Avg. dist. err. Med. dist. err.
Sphere
ITPE-PSO
9492
5.5225° 3.4042°
0.0310 0.0321ITPE-ES 5.5021° 3.3994°
LS Plane 30.5298° 22.1780°
PMVS 12658 16.6978° 9.4666° 0.0416 0.0433
Cube
ITPE-PSO
9960
2.0883° 1.1481°
0.0581 0.0585ITPE-ES 2.0767° 1.1352°
LS Plane 25.1969° 29.6932°
PMVS 13376 24.6775° 21.9029° 0.0908 0.0907
Complex
ITPE-PSO
15343
6.3756° 3.4440°
0.0181 0.0158ITPE-ES 6.3461° 3.4280°
LS Plane 22.0623° 11.0703°
PMVS 47114 12.0152° 9.7374° 0.0272 0.0283
Table 2: Per-point processing times of ITPE-PSO and
ITPE-ES methods (window size is 100 px).
Sphere Cube
ITPE-PSO 0.0265 sec 0.0283 sec
ITPE-ES 0.1884 sec 0.2035 sec
Figure 4: The first two images is the stereo image pair taken
from the observed honey bear. The last two images are
views of the Poisson reconstruction applied to the resulting
oriented point cloud, respectively.
rukawa and Ponce, 2010) to reconstruct the scene us-
ing an image pair from dataset fountain-P11
4
. Then
the same stereo pair was processed by our method, as
well. Surflets were estimated in both cases, then Pois-
son reconstruction was applied to the resulting point
clouds using the same parameter setup.
Fig. 5 shows Poisson reconstructions applied to
the output of the methods. The first row consists of
the stereo image pair which was used. The second and
third rows consist of the results of PMVS and ITPE
from different viewpoints, respectively. It is obvious
that our method gives much more sophisticated result
using the same parameter setup. Remark that PMVS
implements dense reconstruction and surface propa-
gation, as well, by contrast our proposed method does
not. Even so our results approximate the original sur-
face significantly better using the same input.
4
http://cvlabwww.epfl.ch/data/multiview/
Figure 5: The first, second and the third rows consist of
stereo image pairs taken from Fountain dataset, Poisson re-
construction applied on the result of PMVS from two view-
points and the reconstruction of ITPE-PSO from two view-
points, respectively.
5 CONCLUSION
This paper was motivated by the imprecision of the
normal vectors estimated by state-of-the-art recon-
struction algorithms. As it is shown the proposed
method can estimate more accurate tangent planes
than the rival algorithms and the same accuracy of
the point locations. The benefit of using affine trans-
formation instead homography is that it makes the
proposed theory applicable to general camera model.
Moreover, no image undistortion needed.
Compared to other methods (Furukawa and
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
694

Ponce, 2010; Hoppe et al., 1992; Vu et al., 2012;
Megyesi et al., 2006; Lhuillier and Quan, 2005) the
novelty of the proposed algorithm is threefold:
1. As a theoretical contribution: the search space
is narrowed by novel epipolar and geometry-based
constraints. It is mathematically ensured that the new
search space still contains the optimal solution. These
proposed constraints can be extended to multi-view
reconstruction straightforwardly.
2. Particle Swarm Optimization makes global op-
timum available with suitable speed. The proposed
method is well-parallelizable, with its per-point pro-
cessing time is below 0.03 sec. Therefore, a good
GPU implementation could make it real-time capable.
3. It is applicable to various types of cameras,
such as the perspective and omni-directional ones.
We believe that the proposed method is a powerful
tool to be used for sparse reconstruction and provides
a good base for future multiple-view methods.
REFERENCES
Barath, D., Molnar, J., and Hajder, L. (2015). Optimal Sur-
face Normal from Affine Transformation. In VISAPP
2015, pages 305–316.
Bradski, G. et al. (2000). The OpenCV library. Dr. Dobb’s
Journal of Software Tools, 25(11):120–126.
Cagnoni, S. (2008). Evolutionary computer vision: a taxo-
nomic tutorial. In HIS’08. Eighth International Con-
ference on, pages 1–6. IEEE.
Cignoni, P., Corsini, M., and Ranzuglia, G. (2008). Mesh-
lab: an open-source 3d mesh processing system.
Ercim news, 73:45–46.
Faugeras, O. and Keriven, R. (2002). Variational princi-
ples, surface evolution, pde’s, level set methods and
the stereo problem. IEEE.
Faugeras, O. and Lustman, F. (1988). Motion and struc-
ture from motion in a piecewise planar environment.
Technical Report RR-0856, INRIA.
Furukawa, Y. and Ponce, J. (2010). Accurate, dense,
and robust multiview stereopsis. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(8):1362–1376.
Habbecke, M. and Kobbelt, L. (2006). Iterative multi-view
plane fitting. In Int. Fall Workshop of Vision, Model-
ing, and Visualization, pages 73–80.
Habbecke, M. and Kobbelt, L. (2007). A surface-growing
approach to multi-view stereo reconstruction. In
CVPR’07. IEEE Conference on, pages 1–8. IEEE.
Hoppe, H., DeRose, T., Duchamp, T., McDonald, J., and
Stuetzle, W. (1992). Surface reconstruction from un-
organized points, volume 26. ACM.
Kazhdan, M., Bolitho, M., and Hoppe, H. (2006). Pois-
son surface reconstruction. In Proceedings of the
fourth Eurographics symposium on Geometry pro-
cessing, volume 7.
Kennedy, J. (2010). Particle swarm optimization. In Ency-
clopedia of Machine Learning, pages 760–766.
Lhuillier, M. and Quan, L. (2005). A quasi-dense ap-
proach to surface reconstruction from uncalibrated
images. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 27(3):418–433.
Martin, J. and Crowley, J. L. (1995). Comparison of cor-
relation techniques. In International Conference on
Intelligent Autonmous Systems, Karlsruhe (Germany),
pages 86–93.
Megyesi, Z., K
´
os, G., and Chetverikov, D. (2006). Sur-
face normal aided dense reconstruction from images.
In Proceedings of Computer Vision Winter Workshop.
Telc:[sn]. Citeseer.
Moln
´
ar, J. and Chetverikov, D. (2014). Quadratic transfor-
mation for planar mapping of implicit surfaces. Jour-
nal of mathematical imaging and vision, 48(1):176–
184.
Morel, J.-M. and Yu, G. (2009). Asift: A new framework for
fully affine invariant image comparison. SIAM Jour-
nal on Imaging Sciences, 2(2):438–469.
Pons, J.-P., Keriven, R., and Faugeras, O. (2007). Multi-
view stereo reconstruction and scene flow estimation
with a global image-based matching score. Interna-
tional Journal of Computer Vision, 72(2):179–193.
Shi, Y. and Eberhart, R. (1998). A modified particle swarm
optimizer. In Evolutionary Computation Proceedings,
1998. IEEE World Congress on Computational Intel-
ligence., The 1998 IEEE International Conference on,
pages 69–73. IEEE.
Strecha, C., Fransens, R., and Van Gool, L. (2006).
Combined depth and outlier estimation in multi-view
stereo. In CVPR’06 IEEE Computer Society Confer-
ence on, volume 2, pages 2394–2401. IEEE.
Vu, H.-H., Labatut, P., Pons, J.-P., and Keriven, R. (2012).
High accuracy and visibility-consistent dense multi-
view stereo. Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, 34(5):889–901.
Yu, G. and Morel, J.-M. (2009). A fully affine invariant im-
age comparison method. In ICASSP 2009. IEEE In-
ternational Conference on, pages 1597–1600. IEEE.
Zaharescu, A., Boyer, E., and Horaud, R. (2007). Trans-
formesh: a topology-adaptive mesh-based approach
to surface evolution. In ACCV’07, pages 166–175.
Springer.
A Novel Technique for Point-wise Surface Normal Estimation
695
