
Occluding Edges Soft Shadows
A New Approach for Realistic Shadows using Occluding Edges
Christian Liwai Reimann and Bernd Dreier
Department of Computer Science, Kempten University of Applied Sciences, Bahnhofstr. 64, 87439 Kempten, Germany
Keywords:
Soft Shadow, Linear Light.
Abstract:
In this paper, a new algorithm to render soft shadows in real time applications is introduced, namely the
Occluding Edges Soft Shadow algorithm (short OESS). The algorithm approximates the shadow cast from
linear lights by finding the outlines of an occluding object (Occluding Edges) and considering these in a
fragment’s illumination. The method is based on the shadow mapping technique, whereby its capability of
rendering the shadow at an interactive rate does not depend on the complexity of the scene. The paper supplies
an overview for several methods to produce shadows and soft shadows in real time computer graphics, a
detailed description of the newly developed algorithm, and a section with results and future possibilities for
improvements.
1 PREVIOUS WORK
The illustration of hard shadows in computer games
has been common for decades. However, the pro-
duction of realistic soft shadows in real-time appli-
cations remains a difficult task. In the area of real-
time shadowing, there are two basic algorithms which
are commonly used. The ”shadow mapping” algo-
rithm is a pixel based solution introduced in ”cast-
ing curved shadows on curved surfaces” by Lance
Williams (Williams, 1978). The second commonly
used technique is the ”shadow volume” method where
the shadow is considered as a volumetric object ex-
tracted out of the geometry of a scene. Both methods
exclusively produce hard shadows. Nonetheless, the
majority of algorithms for soft shadows can be con-
sidered as an extension of one or the other. This sec-
tion is a brief summary of several existing soft shadow
algorithms for real-time applications, extending the
shadow mapping technique.
In 1996, Michael Herf and Paul S. Heckbert, de-
scribed a relatively straightforwarsectiond algorithm
which renders high quality soft shadows for static
scenes (Heckbert and Herf, 1997). To produce
shadow, a set of point light samples is placed on a
grid in the area of the light source. Each light sam-
ple is used to render a shadow map. These shadow
maps are combined to so called ”radiance textures”.
When the static scene gets displayed in real time, the
radiance textures are mapped to the shadow receiving
objects.
Percentage closer filtering is an approach to anti-
alias shadow maps, that was introduced in ”Rendering
Antialiased Shadows with Depth Maps” by William
T. Reeves et al. (Reeves et al., 1987). The method
can produce a smooth transition between shadowed
and non-shadowed areas, where the size of the tran-
sition area can be influenced by setting the size of
the filtering area. Randima Fernando’s Percentage
Closer Soft Shadow algorithm (short PCSS) uses this
ability to automatically adapt the penumbra size to
generate more realistic shadows (Fernando, 2005).
The algorithm consults randomly chosen pixels of the
shadow map, near the lighted fragment. It is calcu-
lated whether a pixel belongs to a occluder or not. To
obtain the penumbra size, the averaged depth of the
occluding pixels is set in relevance with the fragments
distance to the light source. Only a single point light
sample is needed.
Another algorithm that works with a single light
sample is presented by Gregory S. Johnson et al. in
2009 (Johnson et al., 2009). The method, Soft Irreg-
ular Shadow Mapping, approximates soft shadows by
backprojecting the silhouette of the occluding object
and the receiving point to the light source. This pro-
jection is then used to calculate the portion of the light
seen by the receiving point.
Many light sources in the real world are elongated,
for instance fluorescent tubes. For such light sources
we don’t necessarily need area light algorithms. Elon-
Reimann, C. and Dreier, B.
Occluding Edges Soft Shadows - A New Approach for Realistic Shadows using Occluding Edges.
DOI: 10.5220/0005777701770184
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 1: GRAPP, pages 179-186
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
179
gated light sources can also be approximated with al-
gorithms for linear light sources, which may require
less computing resources.
In 2000, Heidrich et al. introduce the soft shadow
maps algorithm (Heidrich et al., 2000) which approx-
imates the shadow of a linear light, by placing a sam-
ple (point light source) on each end point of the light
source. Both samples have an individual interval of
occluded area on the receiver. In other words, some
areas on the surface of the receiver are seen by both
point light sources. Other areas can only be seen by a
single sample, and some areas aren’t seen at all. The
algorithm approximates soft shadow, by applying a
simple linear blend in those areas of the scene, which
are only visible to a single light sample.
2 APPLIED CONCEPT
The share of the extended light which is seen by a
fragment, defines how much a fragment is lighted.
The OESS-Concept is developed to estimate this
value by determining the ”occluding edge” of the
shadow casting object. The ”occluding edge” is the
silhouette of the occluding object seen from the point
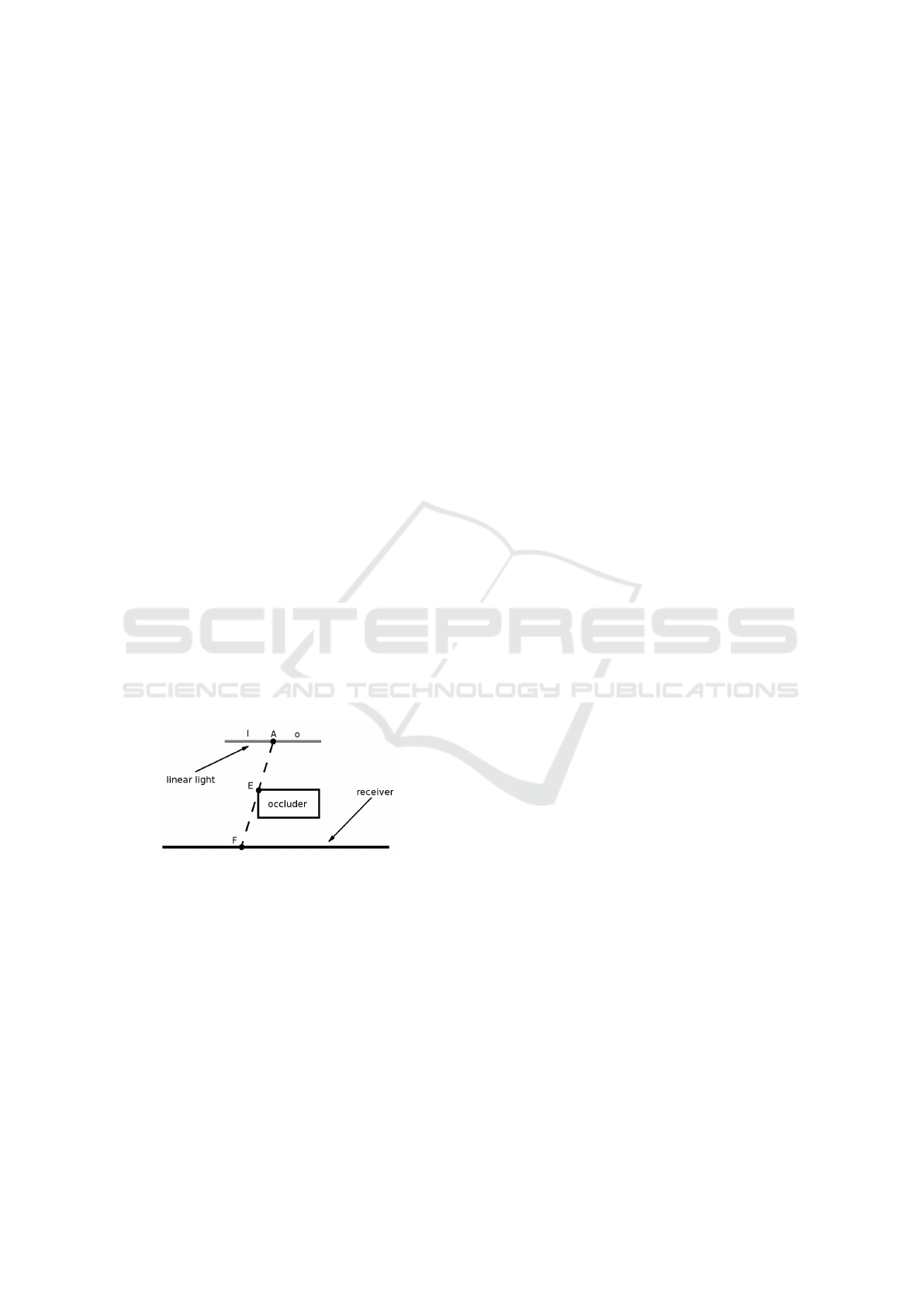
of view of a fragment lying in the penumbra. Figure 1
shows how the occluding edge E can be used to sep-
arate the light into two sectors: Sector l illuminating
fragment F, and sector o which is being occluded. A
is the point where the light source switches from seen
to not seen by the fragment. The ratio between l and
Figure 1: The extrapolated line between a fragment and an
occluding edge, separates the light source in a seen and a
non-seen sector.
o can then be used to calculate the lighting value of
any fragment.
The problem of how to shade a fragment can
therefore be broken down to the challenge of finding
the occluding edge of the shadow casting object. As
mentioned above, occluding edges are the silhouettes
of the occluding object from the perspective of a
fragment in the penumbra. But it is not practicable
to render the scene from the point of view of every
relevant fragment. So the occluding edges have to
be found by using the rendering results of point light
samples on the extended light source. The idea of
using the silhouette of the occluder to determine
penumbra in the pixel space of a shadow map, was
already applied in the soft irregular shadow mapping
method (Johnson et al., 2009), but the further steps of
our approach are different.
Transferring the Concept into Three-Dimensional-
Space: The Occluding Edges Soft Shadow algorithm
is a process of steps that calculate soft shadows. Some
of these steps are explained and implemented in two
dimensional space. To be able to apply them in a three
dimensional scene, the scene has to be transferred to
two dimensions. This can be done by following the
concept of Heidrich et al.:
”Consider the intersection of the scene with
a plane containing the light source. If we
can solve the visibility problem for all such
planes, i.e. for the whole bundle of planes
having the light source as a common line, then
we know the visibility of the light source for
all 3D-points in the scene.” (Heidrich et al.,
2000)
3 OESS PIPELINE STEPS
This section presents the OESS algorithm’s functional
principle, which is a series of steps (pipeline). The
algorithm is meant to work with only two point light
samples, which are placed on each end of a linear light
that is to be approximated. This set of two point sam-
ples (sample left, sample right) is what will represent
our light in the rest of the section.
Point light samples on an extended light source
each have a somewhat different perspective on a
scene. Some parts of the scene behind an occluder are
blocked for one light sample and not for another. For
twice sampled linear lights specifically, this means
that the shadow map of the left sample will always
contain more information about the scene left to an
occluder and vice versa. The sum of information con-
tained by both shadow maps, cannot be simply rep-
resented on a single map. To avoid loss of data, the
output of the first three pipeline steps is produced for
both samples separately, and only at the end of step
four, the two data threads are combined to a single
value of shadow. Figure 2 shows the rough pipeline
of the newly introduced algorithm.
3.1 Step 1: Prerendering the Scene
Similar to most shadow map based soft shadow
algorithms, the OESS starts by rendering a standard
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
180

Figure 2: The rough pipeline of the OESS with the data required and produced in the individual steps.
shadow map from the point of view of each point
light sample. Simultaneously, an extra layer of
each shadow map, a so called ”metadata map”, is
generated.
Metadata Map: In the actual rendering step of
the shadow mapping algorithm, each fragment is as-
signed a pixel of the shadow map. Similarly, in the
OESS the pixels of the shadow maps of the point light
samples are mapped into each other’s pixel spaces to
find out which pixels contain information about the
same part of the scene (corresponding pixels).
The meta data map holds additional information
about each pixel of the shadow map, other than the
depth. The coordinates of the corresponding pixels
are one out of two components of the map. The other
component is the fragment’s tilt to the light sample.
3.2 Step 2: Determining the Occluding
Edges
In this step of the pipeline, the occluding edges are
computed within a ”compute shader”. We use this
type of shader stage to prevent having to render the
scene again. Not the scene itself, but the shadow and
the meta data maps are used to determine the occlud-
ing edges.
From the perspective of a fragment, occluding edges
are the silhouette edges of occluders. But as already
mentioned, it is not feasible to render the scene from
every fragment in the penumbra region, to determine
the occluding edges in real-time. In the scope of this
work no solution was found to determine the exact
and physical correct occluding edges for every frag-
ment in an acceptable time. With the intent to com-
pute nearly realistic occluding edges by using the ren-
dering results of the two light samples, the two fol-
lowing strategies were developed. The basic idea of
the strategies is to find the starting point of a penum-
bra region, and to pretend that this point was the oc-
cluding edge for the whole penumbra.
Each of the strategies have specific issues, but the
methods can be combined to utilize their advantages
and to achieve a consistent detection of the occluding
edges.
Strategy 1 - Tilt of Fragments: In the previous
pipeline step, all fragments that resulted to pixels in
the shadow map of the right light sample, are front
facing the sample (assuming solid objects). Conse-
quently, fragments which are seen by the left light
sample and back face the right light sample, are not
visible to the right side of the linear light source. They
are lying in the penumbra. We can determine whether
a fragment in Step 1 was back or front facing any
light sample, by considering the tilt value of the cor-
responding pixel in the metadata map.
A pixel p
1
in the left shadow map is defined as an
occluding edge, if its origin fragment was front fac-
ing the right sample, but the origin fragment of the
left neighboring pixel of p
1
was back facing the right
sample. The detection of the occluding edges on the
right side of an occluder works analogously with the
right shadow map.
Unfortunately, this strategy only works for
occluding surfaces, that actually have a penumbra
region right next to the occluding edge.
Strategy 2 - Location of Corresponding Pixels:
Considering p
1
as a pixel of the 1D-shadow map of
one light sample, p
2
as its neighbor with a bigger
index, and c
1
/c
2
as their corresponding pixels in the
shadow map of the other light sample, then c
2
usually
has a bigger index then c
1
. If the index of c
2
is smaller
then the one of c
1
, p
1
is lying in the penumbra. We
can now use a third pixel p
3
, the next neighbor of p
2
and its corresponding pixel c3, to check if p
1
is the
first pixel of the penumbra. p
1
is the first pixel in the
penumbra, if c
1
and c3 have a smaller index then c
2
.
And, if p
1
is the first pixel of the penumbra region,
then p
2
is an occluding edge.
This strategy works for hard edges, but if the edge
is rather soft, the corresponding pixel values in the
area around the soft edge, differ only minimally. The
position of the detected occluding edge is then highly
influenced by numerical inaccuracies.
3.3 Step 3: Outreaching the Occluding
Edge
Figure 3 shows the profile of a scene in the upper
Occluding Edges Soft Shadows - A New Approach for Realistic Shadows using Occluding Edges
181
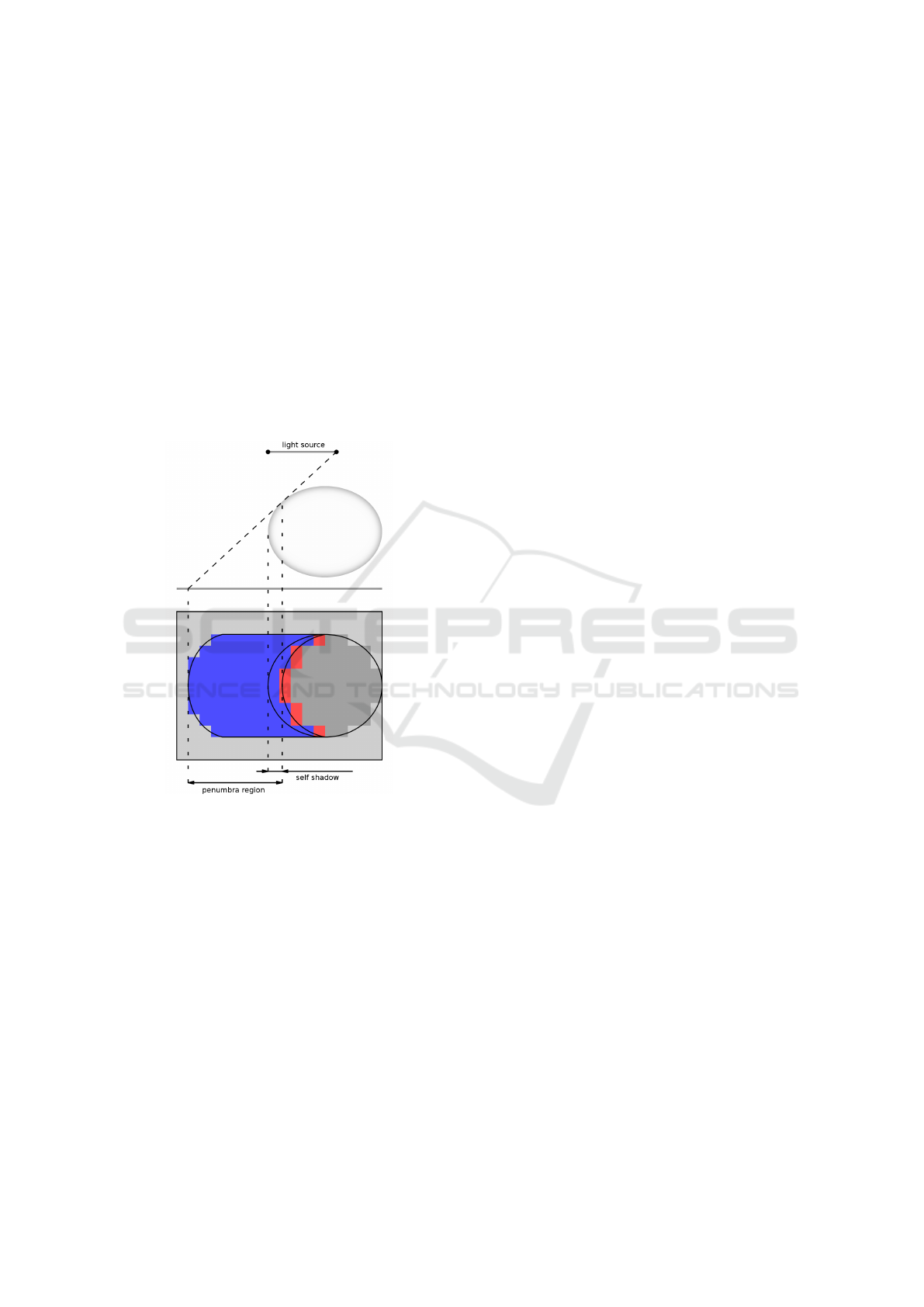
half, and the shadow map rendered from the left light
sample in the lower half. The dashed line that meets
the right light sample and is tangential to the round
occluder, shows which surfaces of the scene are vis-
ible to the right light sample. The point where this
line meets the receiving plane, is the end of the actual
penumbra region. The beginning of the penumbra re-
gion is at the point where the line touches the occlud-
ing object. The pixels of the illustrated shadow map
that lie in between this interval (penumbra region)
correspond to points in the scene, that are only vis-
ible to the left light sample. These pixels are marked
in blue. When the rendering for the screen is per-
formed, the blue pixels will be mapped to fragments
in the penumbra regions, that need an occluding edge
to calculate illumination.
Figure 3: Declaration of the penumbra region in the left
shadow map.
With the help of a compute shader we already de-
fined, whether pixels of the shadow map are occlud-
ing edges or not (see Step 2). Therefore a shader ex-
ecution now knows if the pixel it treats matches to an
occluding edge. In Step 3, information from the oc-
cluding edge handling shader executions is passed to
the pixels in the penumbra region. I.e. in image 3
information, known within each red pixel has to be
transported to the blue pixels directly towards their
left. The data is stored in another layer of the shadow
map which is called ”occluding edge map”. The map
contains the coordinates of the occluding edge being
relevant for a pixel.
3.4 Step 4: Calculate the Lighting
So far we have rendered the scene from the per-
spective of the point light samples (shadow maps),
determined nearly realistic occluding edges, and have
written them into the occluding edges maps. In the
fourth step of the pipeline, the two shadow maps and
the two occluding edges maps are used to compute a
single value of illumination for each fragment in the
actual rendering. The illumination may be divided
into several substeps.
Substep 4.1 - Assigning Umbra and Penumbra:
Some pixels of the occluding edges map, hold data
about an occluding edge. These are mapped to the
corresponding parts of the scene, which are lying in
the penumbra. In a first approach of assigning umbra
and penumbra region, only fragments with the same
depth as the respective pixel in a shadow map, were
considered to lie in the penumbra. Fragments not vis-
ible to any light sample were automatically declared
as part of the umbra.
The problem in doing so, is that the point we use
as occluding edge is only an approximation to the real
occluding edge of a particular fragment. A stark seam
between umbra and penumbra regions was the result.
By declaring all fragments with appropriate texture
coordinates as part of the penumbra, this abrupt tran-
sition can be avoided.
The assignment of penumbra status without
checking the visibility of a fragment however, also
has a disadvantage. Some fragments that lie beyond
a receiver, and should lie within absolute umbra, are
handled like a part of the penumbra only because of
their texture coordinates. This false classification will
not be resolved within the realm of this paper.
Substep 4.2 - Direction to the Occluding Edge: The
task of finding the direction of the occluding edge, is
to compute the vector that points from a fragment F
towards its occluding edge E. All vectors that are
needed for the computation of this vector, are dis-
played in the upper half of figure 4.
L and R are the two point light samples. Point P
is the 3D-point that corresponds to the pixel with the
texture coordinates of fragment F in the left shadow
map. The 3D-coordinates of P can be computed with
the inverse projection matrix of the light source. The
vector
~
LE is read out of the occluding edge map.
~
LF
is generated with the model-view-matrix of the left
light sample and the receiver-object. The lower half
of the image shows the section of the left shadow map
that contains the relevant pixels. The red colored pix-
els are those which are defined as occluding edge.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
182
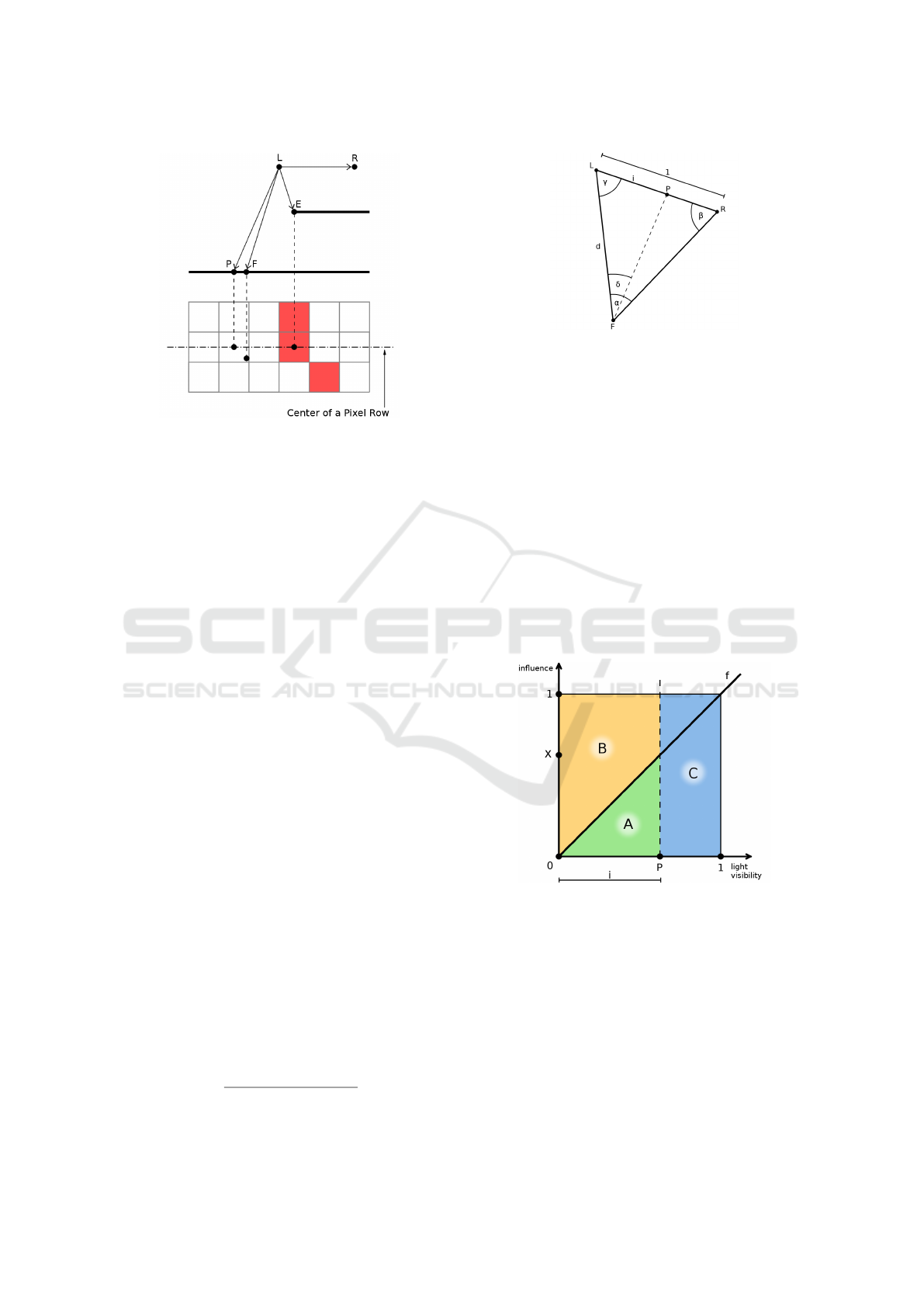
Figure 4: Determining the vector from a fragment F to-
wards its occluding edge E.
To complete the illumination properly, it is necessary
that the line defined by F and
~
FE intersects the linear
light. This issue can be approached by using a frag-
ment’s texture coordinates to interpolate the positions
of two occluding edges. A fragment’s texture coordi-
nates lie between the center of two pixel rows. These
pixel rows have different occluding edges assigned.
We can interpolate the position of these occluding
edges linearly, so that in the occluding edges map,
the interpolated edge has the same y-coordinate as the
fragment. As the points share the same y-coordinate
in the map, they are lying on the same plane, together
with the light source.
The interpolation of the occluding edges as a
useful side effect, also solves the following problem.
If two fragments lie next to each other, but their tex-
ture coordinates correspond to different pixel rows,
they are assigned two different occluding edges. If
no interpolation was done the particular pixel rows
would become visible as stripes with a recognizable
difference in their gray scales (these stripes are prone
to be visually perceived over-contrasty due to the
Mach effect).
Substep 4.3 - Visibility of the Light Source: Fig-
ure 5 shows the triangle between the two point light
samples L and R and a fragment F that is located in
the penumbra region. Point P marks the end of the
luminiferous part i of the light. When considering the
entire size of the light as one, the size of i is equal to
the perceptual share of the seen light. d is the frag-
ment’s distance to the left light sample.
The formula for i is:
i =
sin(β) · sin(δ)
sin(α) · sin(π − δ− γ)
(1)
Figure 5: The luminiferous part of the light i and the mag-
nitudes needed for its definition.
After the seen sector (i) of the light is determined,
one must consider how strong this line segment of the
linear light is influenced by the individual point light
samples. I.e. a point on the linear light source which
is seen by a fragment has to impact the illumination
of the fragment. But the illumination model will only
be computed for the two point light samples, so we
have to interpolate the the results of those computa-
tions. The amount a single point on the light source is
influenced by the individual samples is described in
a linear function f in the OESS (see fig. 6). In the
real world this function depends on the light emitting
consistency of the light source. By adjusting f the
shadow could be given more character. However, this
feature was not considered in the OESS.
Figure 6: Illustration of the distribution of impact on the
luminiferous line segment i.
Figure 6 visualizes how much influence on the seen
light segment i is distributed on the left versus the
righ light sample. Value i and point P refer to figure
5. We assume a fragment that lies in a penumbra
region left to an occluder and sees the light source
up to point P. The influence X of the right point
light on P, is determined by applying function f
on P. The left point light’s influence on P is given
by one minus X. The averaged influence-values for
all points of the luminiferous line segment can be
Occluding Edges Soft Shadows - A New Approach for Realistic Shadows using Occluding Edges
183
determined from the size of areas A and B, where the
size of A tells us how influential the right light sample
is in the illumination of the fragment and B holds
the influence-value of the left light sample. Area C
illustrates the part of the light source that is occluded.
Substep 4.4: Illumination Calculation and Merg-
ing: Substep 4.3 is performed for the penumbra left
of an occluder and right of an occluder separately. Yet
there are fragments which lie both in the left and the
right penumbra regions. Thus they get assigned two
values of influence for each point light sample. In
such a case, to perform the illumination of a frag-
ment, the values of influence of a light sample have
to be merged to a single value.
Finally, to illuminate a fragment, the illumination
models are performed for each point light sample.
The results are multiplied with the respective influ-
ence value and summed up to the ultimate lighting
value of a fragment.
4 RESULTS AND OBSERVATIONS
Figures 7 and 8 show renderings where the OESS was
used to attain soft shadows. In figure 7, the algorithm
is tested on geometrical figures, each of which pro-
vide specific challenges. The scene presents shad-
owing results of small objects, objects with holes,
round surfaces, to the receiver parallel and non par-
allel edges as well as stark and smooth edges. The
shadows of the big sphere and the flat cuboid are over-
lapping.
Figure 7: Rendering result of the OESS #1.
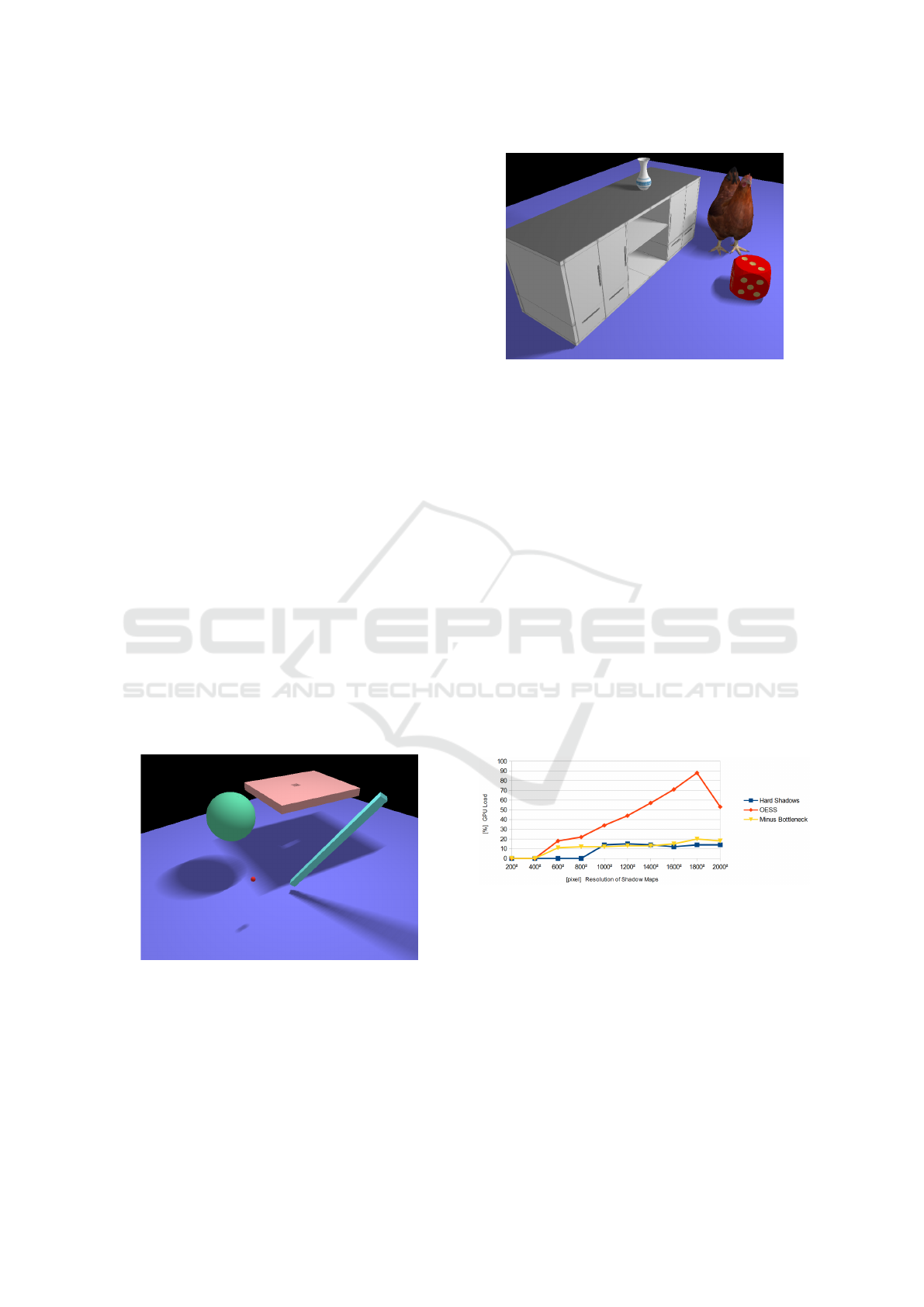
The scene in figure 8 shows the illumination of more
day to day objects. An aspect that becomes more ob-
vious in this scene, is self shadowing of objects.
Figure 8: Rendering result of the OESS #2.
5 PERFORMANCE
To test the performance on the GPU side (where the
major part of the OESS is processed), the OESS
was deployed to a PC with a ”Gigabyte HD 7950
WindForce” graphics card of AMD. The test was
performed using the scene of figure 8. The fol-
lowing three different implementations: ”Hard Shad-
ows” (two regular point light sources); ”OESS” (the
complete algorithm); ”Minus Bottleneck” (the OESS
without Step 3, which appeared to have large effect
on the runtime), were scope of the test. ”Minus Bot-
tleneck” runs the ”Outreaching the Occluding Edges”
step only in the first frame, to be able to test the per-
formance of the rest of the algorithm separately.
The graph in figure 9 compares the percental GPU-
load of the three implementations depending on the
resolution of the shadow maps (and their layers).
Figure 9: Performance measured by the GPU load.
All tests were conducted at a stable framerate of 60
fps, except for the combination OESS / 2000
2
pixels,
where the GPU automatically adjusted the rate limit
to 30 fps (this explains the drop in the red curve). It
may also be noticed that the GPU load in the series
of measurements ”Hard Shadow” and ”Minus Bot-
tleneck” are hardly affected by the maps’ resolution
and almost stay constant. By contrast, the process-
ing expenditure over the entire OESS algorithm has
a distinctive growth with increasing resolution. Ap-
parently, the operation of writing the occluding edge
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
184

information to the pixels which map to penumbra re-
gion, is the only process in the algorithm that keeps it
from having a static load. This is due to the poor dis-
tribution of Step 3, where a small number of shader
executions writes to a much bigger number of pixels.
6 ARTIFACTS
The following sections describe problems of the
OESS that become visible in the rendered shad-
ows. Section ”Potential Future Improvements” then
presents some options how these artifacts could be
removed.
Object Alternation:
Figure 10 is a rendering output of the OESS. A sphere
and a pillar cast shadows on a ground object. When
looking at the edge of the sphere’s shadow, where the
shadow of the pillar becomes visible, we notice a hard
and abrupt transition. This unwanted hard transition
is the artifact called ”Object Alternation”.
Figure 10: Artifacts ”Object Alternation” and ”Spare Edge
Interpolation”.
To receive better understanding about why the ar-
tifact arises, figure 11 provides the sketch of three
cross-sections of the scene. These cross-sections rep-
resent the 2D scenes spanned by the pixel rows of the
shadow maps.
Figure 11: Reason of the ”Object Alternation” artifact.
The red point in each 2D scene is the determined
occluding edge. As the 2D scenes get close to end
of the sphere, the circle (cross-section of the sphere)
declines. This is illustrated in the first two sections of
the image. The third section is the 2D scene, where
the circle finally disappears. Here the occluding edge
is found on the square, which means that the position
of the occluding edge strongly varies between the
second and the third image sections. This abrupt leap
of the occluding edge’s position causes the artifact.
Spare Edge Interpolation: Another artifact can be
found in figure 10. We notice stripes in the penumbra
region that are best visible in the shadow of the
pillar. To understand why these stripes appear, one
has to recall the circumstance that the occluding
edges are determined as pixels in the shadow maps
(Step 2: Determining the Occluding Edge). After
a pixel is determined to mach an occluding edge, a
three-dimensional position is calculated out of the
pixel’s center and is used as the position of an oc-
cluding edge. The resulting 3D-points are somewhat
a rasterized version of the silhouette of the occluding
object. In the fourth step of the OESS pipeline, the
occluding edges’ positions are interpolated to obtain
a smooth result. To trick the human eye, apparently
the interpolation must be carried out between more
than two positions.
Receiver Penetration: The assignment of penumbra
status without checking the visibility of a fragment
as described in Substep 4.1 ”Assigning Umbra and
Penumbra”, presents us another problem. Some frag-
ments that lie beyond a receiver, and should lie within
absolute umbra, are handled like a part of the penum-
bra only because of their texture coordinates.
7 POTENTIAL FUTURE
IMPROVEMENTS
Optimized Smoothing of Occluding Edges’ Posi-
tions: In the algorithm introduced in this paper, the
3D-positions of the occluding edges are interpolated
by simply mixing the coordinates of two neighboring
occluding edges (see ”Substep 4.2: Direction to the
Occluding Edge”). This Method is not ideal and
leads to the artifact described in section ”Spare Edge
Interpolation”. To patch this problem, it is important
to not only make the curve of the interpolated occlud-
ing edges’ positions constant and differentiable (for
instance with Bzier/Spline), but also to interpolate
between more than two edges.
Detecting Edges in the Penumbra: By detecting
additional edges located in the penumbra, a better
method of assigning the penumbra (see ”Assigning
Occluding Edges Soft Shadows - A New Approach for Realistic Shadows using Occluding Edges
185

Umbra and Penumbra” in Step 4 of the OESS
Pipeline) could be found, and the ”Receiver Penetra-
tion” artifact fixed. Also, the ”Object Alternation”
problem is reduced as more edges are found.
However, finding additional edges in parts of the
scene, which are only visible to a single light sam-
ple, is quite a challenge. It’s conceivable that the
scene was re-rendered multiple times from the light
samples’ point of view, thereby ignoring fragments
which are already saved to a shadow map by setting
their depth value to ”infinity”. Each rendering step
would produce a new layer of a shadow map. The
resulting maps would contain more information of
the penumbra than the conventional shadow maps,
which allows the determination of edges in this area.
Usage of Shadow Volume: Instead of using shadow
maps rendered by the point light samples, one could
figure out a way to implement shadow volumes to the
OESS algorithm. This would provide access to com-
pletely new opportunities. Instead of writing the posi-
tion of an occluding edge to a pixel, the color variable
of the shadow volumes’ faces could be used to store
the information of the edge. That way, the main leak
of performance would be avoided. Moreover, the de-
tection of occluding edges would not only be more
precise (due to not doing it in pixel space), but also
the edges in the penumbra areas would automatically
be determined. The ”Spare Edge Interpolation” arti-
fact would vanish as well.
8 CONCLUSION
In this paper we have presented a new strategy to com-
pute soft shadows, namely the OESS algorithm. It
was shown that the OESS can produce shadows of
high visible quality, even for object constellations in
which other methods fail. On the other hand, resulting
artifacts of the introduced technique were pointed out
and explained. In a performance test, it was demon-
strated that up to a shadow map resolution of 800
2
pixels, the new method is very time efficient.
Because the described artifacts unfortunately oc-
cur quite commonly in scenes of average complexity,
the current version of the OESS algorithm would not
provide satisfying results for the majority of applica-
tions.
Nonetheless, the basic idea of the OESS (determine
occluding edges and consider them in the illumina-
tion calculation) seems to be a useful approach to ap-
proximate soft shadows. Several ideas to further de-
velop the algorithm procedure and resolve artifacts,
were discussed in section ”Potential Future Improve-
ments on the OESS”. Especially the employment of
the shadow volume algorithm looks quite promising
and could eventually make the OESS highly interest-
ing for 3D-applications.
REFERENCES
Fernando, R. (2005). Percentage-closer soft shadows. In
ACM SIGGRAPH 2005 Sketches, SIGGRAPH ’05,
New York, NY, USA. ACM.
Heckbert, P. S. and Herf, M. (1997). Simulating
soft shadows with graphics hardware. Technical
Report CMU-CS-97-104, Carnegie-Mellon Univer-
sity.Computer science. Pittsburgh (PA US), Pitts-
burgh.
Heidrich, W., Brabec, S., and Seidel, H.-P. (2000). Soft
shadow maps for linear lights. In P
´
eroche, B. and
Rushmeier, H., editors, Rendering Techniques 2000,
Proceedings of the 11th Eurographics Workshop on
Rendering, Springer Computer Science, pages 269–
280, Brno, Czech Republic. Eurographics, Springer.
Johnson, G. S., Hunt, W. A., Hux, A., Mark, W. R., Burns,
C. A., and Junkins, S. (2009). Soft irregular shadow
mapping: Fast, high-quality, and robust soft shadows.
In Proceedings of the 2009 Symposium on Interactive
3D Graphics and Games, I3D ’09, pages 57–66, New
York, NY, USA. ACM.
Reeves, W. T., Salesin, D. H., and Cook, R. L. (1987). Ren-
dering antialiased shadows with depth maps. SIG-
GRAPH Comput. Graph., 21(4):283–291.
Williams, L. (1978). Casting curved shadows on curved sur-
faces. SIGGRAPH Comput. Graph., 12(3):270–274.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
186
