
Customized 3D Clothes Modeling for Virtual Try-on System based on
Multiple Kinects
Shiyi Huang and Won-Sook Lee
School of Electrical Engineering and Computer Science, University of Ottawa, Ottawa, Canada
Keywords: 3D Clothes Modeling, Virtual Try-on, Kinect.
Abstract: Most existing 3D virtual try-on systems put clothes designed in one environment on a human captured in
another environment, which cause the mismatching brightness problem. And also typical 3D clothes
modeling starts with manually designed 2D patterns, deforms them to fit on a human, and applies stitching
to sew those patterns together. Such work usually relies on labour work. In this paper, we describe an
approach to reconstruct clothes and human that both are from the same space. With multiple Kinects, it
models the 3D clothes directly out of a dressed human without the need of the predefined 2D clothes
patterns, and fits them to a human user. Our approach has several advantages: (1) a simple hardware setting
consisted of multiple Kinects to capture a human model; (2) 3D clothes modeling directly out of captured
human model. To the best of our knowledge, our work is the first one which separates clothes out of
captured human figures; (3) resizing of clothes adapting to any sized human user; (4) a novel idea of virtual
try-on where clothes and human are captured in the same location.
1 INTRODUCTION
Virtual try-on for clothes is the technique that can
visualize the human dressed in selected clothes
virtually without need to undress and dress
themselves physically. Basically, it consists of two
objects: human and clothes. And the main objective
is to fit the clothes to a human body.
Based on the data type of human and clothes, we
define that virtual try-on systems can be divided into
2D and 3D systems. And we define 2D systems to
be 2D clothes and 2D/3D human while 3D systems
to be 3D clothes and 2D/3D human. Substantial
progress has been achieved in this area during last
decades.
(Hauswiesner et al., 2013) proposed a 2D virtual
try-on system through image-based rendering
approach. The system has one obvious limitation,
which is that a large garment database is required to
solve the mismatching problem. The EON
Interactive Mirror (Giovanni et al., 2012) was
considered as the 3D virtual try-on system consisted
of two stages. In the offline stage, 3D clothes are
modelled based on actual catalogue images. While
online, it used one Kinect to detect the nearest
person in the scenario and track his/her motion to
merge 3D clothes with the user’s HD video frames
from one high-definition camera. One of its
limitations is that 3D clothes are resized uniformly
based on the customer’s shoulder height. (Zhang et
al., 2014) also adopted one Kinect to construct a 3D
virtual try-on system. In their system, one
customized 3D static human model was generated
from a template model based on the anthropometry
method. And animation of the 3D static human
model was performed based on the recorded
customer’s motion data captured by Kinect. While
several predefined 2D garment patterns were
mapped onto the 3D human model to generate the
3D clothes. However, special data format of 2D
clothes patterns was required to avoid manually pre-
positioning them onto the human model for this
system. Other systems such Fitnect, and the demo
video about Kinect for Windows Retail Clothes
described the similar idea as the EON Interactive
Mirror.
In this paper, we introduce a new idea of virtual
try-on system. A mannequin is dressed nicely and a
customer wants to check the clothes on him/her
body but without actually putting on the clothes. We
just capture the customer’s body data using a
scanner (or the customer’s previously stored data
can be used in the shop) and we transfer the
118
Huang, S. and Lee, W-s.
Customized 3D Clothes Modeling for Virtual Try-on System based on Multiple Kinects.
DOI: 10.5220/0005782001160121
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 1: GRAPP, pages 118-123
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

mannequin’s clothes to the customer virtually. We
emphasize that the clothes and human are from the
same space to avoid the mismatching brightness
problem: bright/dark human skin color and
dark/bright clothes. We use multiple Kinects to
capture different views of one mannequin dressed in
one shirt and one trouser. Clothes are extracted from
the dressed mannequin and separated into two pieces
of clothes. Multiple point clouds of the clothes with
respect to the different views are aligned. And then
surface reconstruction technique was applied to the
aligned point clouds to generate the clothes mesh.
Next, we applied mesh post-processing and texture
mapping the clothes mesh to obtain the textured
clothes. Besides, we used KinectFusion to scan the
naked mannequin and a user dressed in the tight
clothes to generate two 3D human models. Finally
we resize the clothes to fit to the user based on the
same transformation that deforms the naked
mannequin to have the user’s body size and shape. A
detailed overview of our method is provided in
Section 3.
2 RELATED WORK
This section briefly describes related work about
virtual try-on systems, clothes modeling, clothes
customization, and provides a short overview of data
processing techniques related to our work.
2.1 Virtual Try-on
Over the last several years, various methods for
virtual try-on have been designed. Due to the lack of
the available high-performance and high-accuracy
capturing device, some early work usually generated
relatively poor result. In the following, we mainly
discuss the latest development.
Virtual Try-on in 2D: (Araki and Muraoka, 2008)
designed a 2D system that resized the triangulated
clothes images based on several markers on the
user’s joints to fit his/her motion captured by a web
camera. (Hauswiesner et al., 2013) constructed a
system that transferred the appearance of the
recorded clothes onto the user’s body by matching
his/her pose from the input video frames with that
from the recorded video frames. (Isıkdogan and
Kara, 2013) mapped and resized 2D clothes images
to fit to the user based on the tracked skeleton from
one Kinect.
One obvious disadvantage of the 2D virtual try-
on system is that the original clothes in the user’s
body usually can be seen even after putting on
selected clothes.
Virtual Try-on in 3D: With the advance of several
3D sensing devices, especially Kinect, the
development of the 3D virtual try-on system is
unprecedented. (Giovanni et al., 2012) fitted the
manually modelled 3D clothes to the user’ high-
definition video frames from one HD camera by
using one Kinect to track his/her skeleton and align
clothes with the skeleton. (Yuan et al., 2013) uses
one Kinect to capture user’s data, such as skeleton
data and body skin colour for customizing one
avatar, and then transferred 3D clothes onto the
customized avatar. (Zhang et al., 2014) also utilized
one Kinect to capture user’s data for customizing
and refining one template human model. And
several 2D clothes patterns were fitted to the human
model and then sewed together to achieve the virtual
try-on effect.
Those 3D virtual try-on systems have a common
drawback, which is that clothes and human are from
different space. And those 3D clothes modeling
parts are usually 2D patterns based.
2.2 Clothes Modeling for Virtual
Try-on
3D clothes modeling is one part of the virtual try-on
system, which basically can be divided into three
types: manually modeling, automatically 2D patterns
to 3D clothes modeling, and scanner-based 3D
modeling. Other methods are also proposed for 3D
clothes modeling, for example, (Furukawa et al.,
2000) created 3D clothes based on 2D photo input
where the body was created from three photo views
and then clothes were extracted in 3D by colour
segmentation. As it was based on feature-based
human cloning technique, accuracy was relatively
low.
Manually clothes modeling usually requires the
designer to use some 3D computer graphic software,
such as Blender, 3ds Max or Maya to model 3D
clothes. Several 2D clothes patterns were designed
virtually, and the linkages were specified by
manually selecting corresponding points between
nearby patterns. Then those patterns were deformed
to fit a digital human model and textured to generate
the 3D clothes. This approach usually requires a lot
of manual work in order to generate a high quality
result.
The automatically 2D patterns to 3D clothes
modeling was introduced by (Zhang et al., 2014),
which required special data format of 2D clothes
patterns to prevent manually preposition 2D patterns
Customized 3D Clothes Modeling for Virtual Try-on System based on Multiple Kinects
119

onto customized human model. However, it still
required designers to position those 2D patterns to
the template model manually.
Scanner-based 3D clothes modeling is the idea
that reconstruct 3D clothes based on the 3D scanner
device. The scanner-based method is popular for
human modeling and hair modeling. However, to the
best of our knowledge, we haven’t seen any research
about scanner-based 3D clothes modeling yet, which
can be an area that we can have a contribution to.
2.3 Clothes Customization for Virtual
Try-on
Fitting the 3D clothes to the 3D human is a crucial
part in the 3D virtual try-on system. The fitting step
directly affects the visualization result. Most existed
3D virtual try-on systems achieve the clothes
customization by deforming several 2D patterns to
fit the human body. However, the approach that
directly resizing 3D clothes to fit to the 3D human is
more intuitive. (Li et al., 2010) deformed the clothes
mesh to match the shapes of the human model
through several steps, which made the approach
relatively complicated.
2.4 Related Data Processing
Techniques
For our 3D scanner-based virtual try-on system,
several data processing techniques have been used:
color segmentation, 3D registration, surface
reconstruction, texture mapping, and resizing.
(Zhang, 2000)’s calibration method is widely
used to calibrate camera for 3D reconstruction,
which only requires one simple pattern that has
several feature points to be detected so that the
intrinsic parameters can be calculated. Stereo camera
calibration is used to calculate the extrinsic
parameters between two cameras. In order to extract
concerned objects from the image, the color
segmentation techniques are the ideal choice. JSEG
system developed by (Deng and Manjunath, 2001)
was used in our system for clothes segmentation.
From the captured images and depth data, several
point clouds can be generated. Since each point
clouds is with respect to different coordinate system,
we used ICP algorithm (Besl and Neil, 1992) to
align multiple point clouds. Poisson Surface
Reconstruction method proposed by (Kazhdan et al.,
2006) was used to create mesh. A texture mapping
technique similar to (Zhou et al., 2005) was utilized
to apply texture information to the mesh. And for
resizing the clothes to fit the human body, we
utilized the Radial Basis Function.
3 OVERVIEW
Our method of 3D clothed modeling and
customization based on multiple Kinects consists of
three key components: data acquisition, 3D clothes
modeling and their customization. In Sections 4 to 6
we elaborate on the components of our method. We
then show the results in Section 7, and conclude
with a discussion of the method.
4 DATA ACQUISITION
This section describes our acquisition setup,
including the hardware and calibration.
Our capture environment is displayed in Figure 1.
Figure 1: Capture environment setting.
We utilized Kinect V2 as the main capturing
device, which is equipped with one higher resolution
RGB camera and one higher depth fidelity depth
camera compared with the Kinect V1. Three kinds
of images can be generated from the two cameras:
RGB image, depth image and infrared image.
Besides, depth image and infrared image are
generated from the same camera. We utilized
(Zhang, 2000)’s method to do camera calibration for
every Kinect built-in cameras. A checkerboard
consists of 12 x 20 squares was used as the pattern to
implement the calibration. 25 synchronized RGB
images and infrared images for each Kinect built-in
RGB camera and depth camera were captured. The
captured checkerboard images are displayed in
Figure 2.
Figure 2: Captured checkerboard images. Left: RGB
image; Right: Infrared image.
Through stereo camera calibration, the
transformation between RGB camera space and
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
120
depth camera space can be derived. (Macknojia et
al., 2013) introduced the idea of camera calibration
of two built-in cameras and stereo camera
calibration for Kinect V1 in detail. Different from
Kinect V1, there is no offset between depth image
and infrared image for Kinect V2.
In the data acquisition stage, we used
KinectFusion (Newcombe et al., 2011) to scan the
naked mannequin and a user dressed in tight clothes
to obtain their corresponding point clouds, which
would be processed based on surface reconstruction
algorithm to model two 3D mesh out of them. And
then we utilize four Kinects to capture four views of
the naked mannequin so that we can align each view
with the naked mannequin model from KinectFusion
to calculate the transformation between every two
Kinects, which can be used to align multiple views
of the clothes. Next, we captured four views of the
mannequin with one shirt and one trouser.
5 3D CLOTHES MODELING
5.1 Clothes Extraction
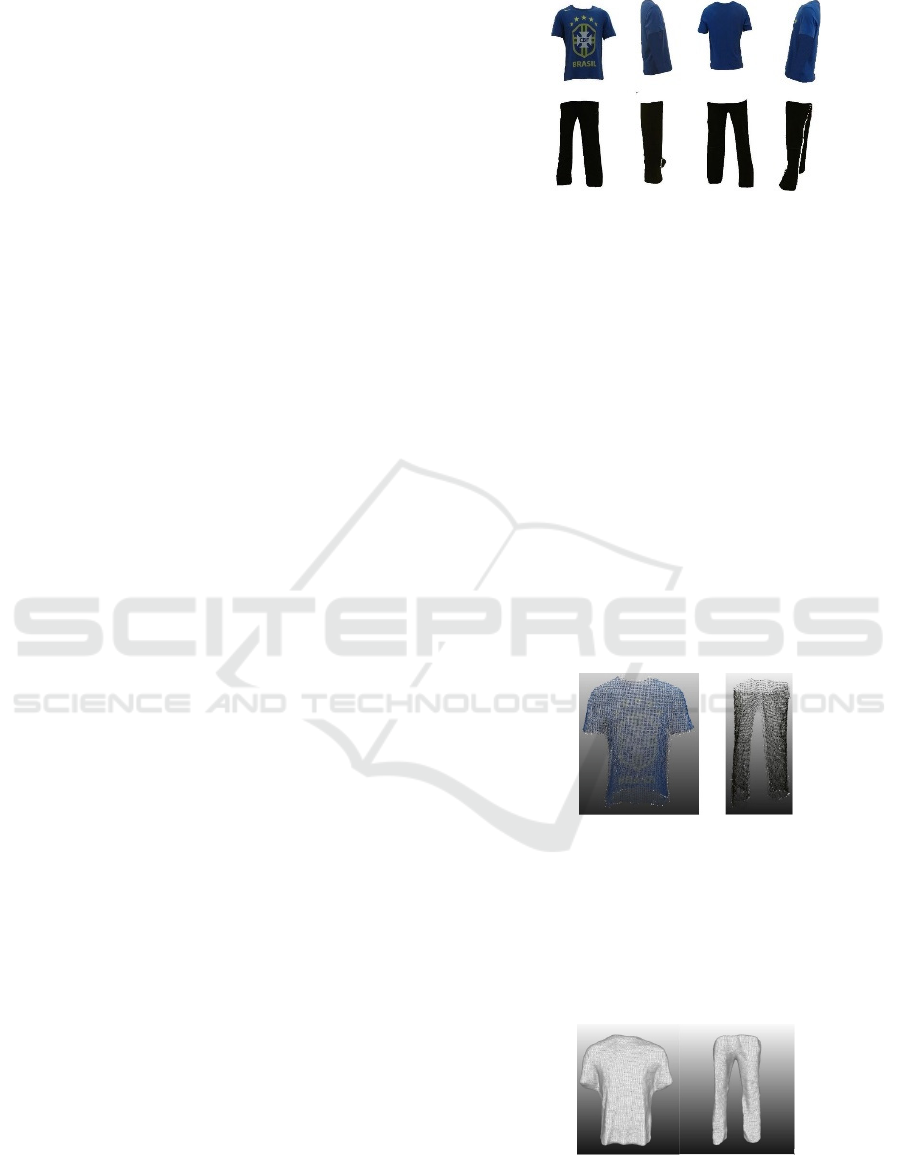
Four views’ data of clothes are acquired during the
data acquisition step. Clothes extraction was
implemented through two steps: (1) extracting the
dressed mannequin out of the common background;
(2) extracting clothes out of the dressed mannequin
and separating them into one shirt and one trouser.
We utilized Kinect Body Tracking Function to
extract the dressed mannequin from the common
background in front and back view. While for left
and right view, since the Function usually doesn’t
work, depth thresholding was used to roughly
extract the dressed mannequin.
To extract clothes out of the dressed mannequin,
we used the JSEG algorithm proposed by (Deng and
Manjunath, 2001). And then several manual work
was performed to remove some unconcerned
regions. And due to the block of mannequin’s hands,
data missing area existed in the left and right view,
which require the step of region filling to repair
those areas. The final result is displayed in Figure 3.
5.2 3D Registration of Kinect Data
We have five groups of 3D data, four from four
views of Kinect (four views of clothes data and four
views of the naked mannequin) and one from
KinectFusion (the naked mannequin) and we need to
register them in one space.
Figure 3: Four views shirt and trouser images after
performing clothes extraction, manually removing
unconcerned regions and region filling.
We used ICP proposed by (Besl and Neil, 1992)
to align multiple point clouds to create the 360
°
point clouds. Our proposed approach to do 3D
registration for clothes lied in four steps: (1) using
KinectFusion to scan the naked mannequin to get the
well-aligned point clouds; (2) using four Kinects to
capture four views of the naked mannequin; (3)
aligning each view of the naked mannequin with the
well-aligned point clouds to obtain the relation
between every two Kinects; (4) aligning four views
point clouds of clothes using the same relation
calculated in (3).
The aligned point clouds of clothes usually
contain several noise and outliers, and then we
manually removed many outliers. The result is
displayed in Figure 4.
Figure 4: Left to right: aligned shirt and trouser point
clouds after manually removing several outliers.
5.3 Surface Reconstruction of Clothes
Based on the aligned point clouds of clothes, we
utilized Poisson surface reconstruction algorithm to
create the mesh. The result is displayed in Figure 5.
Figure 5: Left to right: reconstructed shirt and trouser
mesh after using Poisson surface reconstruction.
The model reconstructed using Poisson surface
Customized 3D Clothes Modeling for Virtual Try-on System based on Multiple Kinects
121

reconstruction is watertight, which makes the
reconstructed shirt and trouser quite different from
the real clothes. Several steps are implemented to
process the watertight 3D model of clothes to match
the clothes regions in the image. Our proposed
approach was divided into six steps: (1) using Kd-
Tree to do roughly texture mapping for the clothes;
(2) selecting several points on the mesh manually;
(3) deleting triangular faces along the selected
points; (4) removing other unconcerned components;
(5) finding the boundary edges of the mesh left; (6)
creating several triangular faces to link boundary
edges and the selected points. The result is displayed
in Figure 6.
Figure 6: Left to right: reconstructed shirt and trouser
mesh after mesh post-processing.
5.4 Texture Mapping of Clothes
After the surface reconstruction and mesh post-
processing, we obtained the mesh without texture
information. Then we segmented the mesh into four
parts with respect to each view for texture mapping.
Several points were manually selected on the mesh
to define the intersection between every two views.
Then we applied the algorithm used for deleting
triangular faces along the selected points to the
clothes mesh. The textured shirt and trouser are
displayed in Figure 7.
Figure 7: Top to Down: the well-reconstructed and
textured shirt and trouser mesh after texture mapping.
6 3D CLOTHES
CUSTOMIZATION
We used Radial Basis Function for clothes
customization. The approach to resize the 3D clothes
to fit to the user’s body can be divided into two
steps: (1) deforming the naked mannequin to have
the user’s body size and shape using Radial Basis
Function (2) resizing the 3D clothes to fit to the
user’s body using the same Radial Basis Function.
Using Radial Basis Function for resizing requires
two data groups: control points and target points.
Multiple points were selected on source and target
models manually. The point selections are displayed
in Figure 8.
(a) (b)
Figure 8: (a): control points selection on the naked
mannequin’s body; (b): target points selection on the
user’s body.
The raw naked mannequin model, user’s 3D
model, and the deformed naked mannequin model
are displayed in Figure 9.
3D clothes were resized and fitted to the user.
But the fitting result has the surface penetrating
problems: several faces of the 3D clothes penetrating
into the user’s body. We applied the surface
correction algorithm based on the point-to-plane
project theory to pull those penetrated faces out of
the body. And the result is displayed in Figure 10.
Figure 9: Left to Right: raw naked mannequin model;
user’s 3D model; deformed naked mannequin model.
Figure 10: Left to Right: user with reconstructed clothes
before and after surface correction.
7 RESULT
The evaluation is based on the visualization
comparison between the captured clothes image and
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
122

the reconstructed clothes. As shown in Figure 11,
the clothes shape and texture in the captured images
are passed to the 3D clothes model. The patterns on
shirt are much similar to the raw patterns, and the
virtual mannequin dressing the reconstructed clothes
also shares a variety of similarities with the actual
one. Clothes with different styles (such as pants,
skirt, trouser, and short/long sleeves shirt) and
various colour and texture (such as blue, green, and
black) are all successfully reconstructed using the
proposed approach.
Figure 11: Left to Right: raw images of the mannequin
dressed in selected clothes; reconstructed mannequin with
the reconstructed clothes; user dressed in deformed clothes.
8 CONCLUSIONS
In this paper, a novel approach for 3D clothes
modeling and customization is proposed. Different
from previous systems, we captured clothes and
human data that both are from the same space to
avoid the mismatching brightness problem. Besides,
we modelled 3D clothes directly out of the captured
human figures without need to use the predefined
2D patterns to avoid so much labour work. Those
characteristic makes our system more practical.
ACKNOWLEDGEMENTS
We wish to thank Iman Eshraghi for his help during
data acquisition.
REFERENCES
Araki, N., and Muraoka, Y. 2008. Follow-the-Trial-Fitter
Real-time addressing without undressing. In Third
International Conference on Digital Information
Management, 33-38.
Besl, P. J., and McKay, N. D. 1992. Method for
registration of 3-D shapes. In International Society for
Optics and Photonics, Robotics-DL tentative, 586-606.
Deng, Y. and Manjunath, B. S. 2001. Unsupervised
segmentation of colour-texture regions in images and
video. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 800-810.
Furukawa, T. Gu, J., Lee, W., and Magnenat-Thalmann,
N. 2000. 3D clothes modeling from photo cloned
human body. In Springer Berlin Heidelberg, Virtual
Worlds, 159-170.
Giovanni, s., Choi, Y. C., Huang, J., Khoo, E. T., and Yin,
K. 2012. Virtual try-on using Kinect and HD camera.
In Springer Berlin Heidelberg, Motion in Games, 55-
65.
Hauswiesner, S., Straka, M., and Reitmayr, G. 2013.
Virtual try-on through image-based rendering. IEEE
Transactions on Visualization and Computer
Graphics, 1552-1565.
Isikdogan, F., and Kara, G. 2013. A real time virtual
dressing room using Kinect.
Kazhdan, M., Bolitho, M., and Hoppe, H. 2006. Poisson
surface reconstruction. In Proceedings of the fourth
Eurographics symposium on Geometry processing.
Li, J., Ye, J., Wang, Y., Bai, L., and Lu, G. 2010. Fitting
3D garment models onto individual human models. In
Computers and Graphics, 742-755.
Macknojia, R., Chavez-Aragon, A., Payeur, P., and
Laganiere, R. 2013. Calibration of a network Kinect
sensors for robotic inspection over a large workspace.
In IEEE Workshop on Robot Vision, 184-190.
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., and Fitzgibbon, A. 2011.
KinectFusion: Real-time dense surface mapping and
tracking. In 10th IEEE international symposium on
Mixed and augmented reality, 127-136.
Yuan, M., Khan, I. R., Farbiz, F., Yao, S., Niswar, A., and
Foo, M. H. 2013. A mixed reality virtual clothes try-
on system. IEEE Transactions on Multimedia, 1958-
1968.
Zhang, Z. 2000. A flexible new technique for camera
calibration. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 1330-1334.
Zhou, K., Wang, X., Tong, Y., Desbrun, M., Guo, B., and
Shum, H. Y. 2005. TextureMontage. In ACM
Transactions on Graphics, 1148-1155.
Zhang, Y., Zheng, J., and Magnenat-Thalmann, N. 2014.
Clothes Simulation and Virtual Try-on with Kinect
Based on Human Body Adaptation. In Spring
Singapore Simulation, Serous Games and Their
Applications, 31-50.
Customized 3D Clothes Modeling for Virtual Try-on System based on Multiple Kinects
123
