
Evaluation of Gait Parameters Determined by InvestiGAIT against a
Reference System
Katja Orlowski
1,2
, Harald Loose
1
, Falko Eckardt
2
, J
¨
urgen Edelmann-Nusser
2
and Kerstin Witte
2
1
Department of Computer Science and Media, Brandenburg University of Applied Sciences, Brandenburg, Germany
2
Institute of Sport Science, Otto-von-Guericke University, Magdeburg, Germany
Keywords:
Gait Analysis, Gait Parameters, Validity, Inertial Measurements, Motion Capture.
Abstract:
The purpose is to investigate the validity of an inertial-sensor based gait analysis system (InvestiGAIT) con-
sisting of off-the-shelf sensors and an in-house capturing and analyzing software. The gait of five persons with
transfermoral limb loss were captured with the inertial system (Shimmer sensors) and the motion capture sys-
tem (Vicon) integrating two force plates chosen as reference system in this study. Eleven gait parameters are
determined from the data of the captured gait sequences. These gait parameters were compared descriptively
and statistically using boxplots, Bland-Altman-plots, including the mean of difference (MOD) and the limits
of agreement (LoA), the standard error of the mean (SEM), the Wilcoxon test and the Pearson’s correlation
coefficient. A complete validity of the gait parameters was not assumed due to the different measurement
methods and the impact of the IMU sensor attachment (on the lower shank above the ankle). For the sound
and the amputated leg four gait parameters show no significant difference (stride duration, cadence, velocity,
stride length). All the other parameters have a p-value smaller than 0.05. Most of the gait parameters have
a small MOD, SEM and LoA. These values show a very small absolute difference between the gait parame-
ters of both systems. Based on the results the InvestiGAIT system can be assumed as valid and suitable for
follow-up investigations of human gait in research projects or the clinical environment. Nevertheless, further
investigations with healthy subjects and a sensor attachment on the subjects’ shoe are planned.
1 INTRODUCTION
The instrumental gait analysis is a well-known exam-
ination method. The gold standard of the instrumen-
tal gait analysis are motion capture systems, such as
Vicon, combined with force plates (Richards, 1999;
Azad, 2009). Due to the costs and time which are
related to an examination, that established method is
only available for university hospitals and research
centers. Smaller institutions or physiotherapeutical
units do not have either the time during the therapeu-
tic process nor the money to purchase such a system
(Cloete and Scheffer, 2008). In the daily routine the
gait analysis is done visually or with the assistance of
simple video recording. The latter is useful to show
the patient’s existing deviations from the normal gait.
This is a supporting tool used to be sensible for gait
anomalies. For that purpose the visual recording is
very useful, but it cannot be used for quantifying these
anomalies. Inertial measurement units (IMU) could
be helpful for that application area and necessary for
follow-up examinations. (Cuesta-Vargas et al., 2010)
Due to the technical development IMUs are nowadays
small in size, cost-efficient and permit a fast and easy
analysis of the human gait. Our system called Investi-
GAIT consists of two to four IMU (Shimmer) and the
in-house capturing and analyzing software are used
in different projects in teaching and research. Before
such an inertial-sensor based gait analysis system can
be used in the clinical environment the reliability, va-
lidity and objectivity of the system has to be checked
(Atkinson and Nevill, 1998). The reliability was al-
ready investigated and results are prepared for publi-
cation.
Schwameder et al. (Schwameder et al., 2015) exam-
ined the validity of the GaitUp system (Physiolog4,
GaitUp System, Lausanne, Switzerland, 200 Hz) un-
der normal and limping gait conditions. The sensors
are attached directly to the shoes of the subjects. As-
pects of validity are given for five gait parameters as
absolute differences between the both system, as cor-
relation coefficient and Bland-Altman plots.
The aim of that paper is to present the results of the
validity examination. The gait parameters determined
256
Orlowski, K., Loose, H., Eckardt, F., Edelmann-Nusser, J. and Witte, K.
Evaluation of Gait Parameters Determined by InvestiGAIT against a Reference System.
DOI: 10.5220/0005783502560262
In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2016) - Volume 4: BIOSIGNALS, pages 256-262
ISBN: 978-989-758-170-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

by InvestiGAIT are compared to those parameters de-
termined by the reference system, the motion capture
system Vicon. Due to the fact that the gait parameter
stride length can be calculated in different ways, three
methods are presented. The results are compared to
the stride length determined by the Vicon system. The
most valid calculation method should be specified and
used in further investigations.
2 METHODS AND MATERIALS
The gait of five persons with transfemoral limb loss
was captured with Shimmer sensors (9-DoF-Sensors,
Shimmer, Dublin, Ireland) and the motion capturing
system Vicon (Vicon Motion Systems Ltd. UK). In
parallel the gait sequences were recorded with a dig-
ital camera. The Shimmer sensors were attached lat-
erally to the lower shank above the ankle. The Vicon
system consisted of 12 infrared cameras and was syn-
chronized with two force plates (AMTI, AMTI Force
and Motion, Watertown, USA). 36 passive markers
were attached to the body of the subject to capture
the motion of the body during the gait sequences.
The full-body markerset Plug-In-Gait was used to de-
tect the gait events and calculate the gait parameters.
The measured motion signals (acceleration and angu-
lar velocity) were analyzed with an in-house software
(InvestiGAIT) implemented in MATLAB (TheMath-
works Inc., Natick, MA, USA).
Figure 1: Marker and sensor placement on the amputated
leg.
The gait events (initial and terminal contact, IC
and TC) were detected from the angular velocity
signal of the z axis representing the rotation in the
sagittal plane. The gait events are defined as the local
minima (IC and TC) and maxima (midswing) of the
gyroscope signal described in (Orlowski and Loose,
2013) similar to (Greene et al., 2010; Mannini and
Sabatini, 2012; Hundza et al., 2014). The heel contact
(IC) is detected using a threshold of 20 N based on
the force plates. Without the force plates the height
of the heel marker is used to detect the heel contact.
In case of the inertial sensors the motion of the lower
shank is tracked during the gait. It is known that the
detected IC and TC events correspond to the events
detected by the reference system, but are not identical.
2.1 Setting
The group of subjects consisted of four men and one
woman. The age was 47.7 ± 10.3 years, the duration
of wearing the prosthesis was 23.2 ± 21.8 years, the
height of the subjects was 176.8 ± 6.3 cm with body
weight of 89,6±17.6 kg. Two subjects have the pros-
thesis on the right and three on the left side.
Each subject walked a 12 m line straight forward with
his/her normal self-selected speed. The gait sequence
was repeated at least 12 times.
Vicon measurements were classified as valid when
only one single foot contact was registered for each
force plate. Some inertial measurements had to be re-
jected due to storage errors. Consequently, only nine
to ten gait sequences per subject were analyzed. From
the whole gait sequence only the gait cycle, which
was done on the force plate, was investigated by both
systems.
For both systems the gait cycles made on the force
plates was investigated. In case of the IMU analy-
sis, the additional video recording was used to find
out which gait cycles were done on the force plates.
A visual inspection of the video recording has to be
conducted.
2.2 Gait Parameters
The gait parameters are calculated by stride-by-stride
based algorithm after detecting the gait events TC,
midswing, and IC of each leg from the angular ve-
locity signal in the sagittal plane (see figure 2). The
validity of the following gait parameters listed and de-
scribed below were investigated:
• Stride Duration [s]: duration from one IC to the
next IC
stride
i
= IC
i+1
− IC
i
• Swing Duration [s]: duration from TC to IC
swing
i
= IC
i
− TC
i
• Single Leg Support [s]: duration of the stance
phase while the contralateral leg has no contact to
the ground, corresponds to the swing phase of the
contralateral leg given as example for the right leg
SLS
R
i
= swing
L
i
Evaluation of Gait Parameters Determined by InvestiGAIT against a Reference System
257
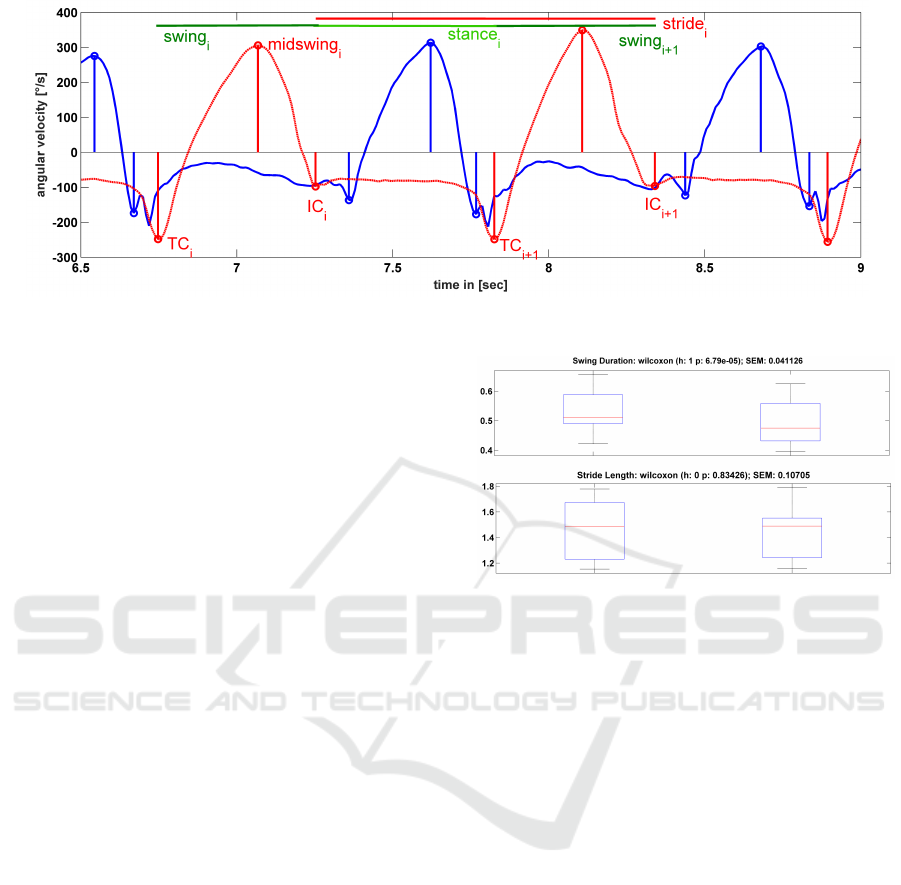
Figure 2: Angular velocity of the sound (blue solid) and amputated leg (red dotted) with marked gait events and gait parameters
- stride, stance and swing (step).
• Double Leg Support [s]: duration of the contact
of both legs to the ground, comprise of initial and
terminal double leg support given as example for
the right leg
DLS
R
initial
i
= TC
R
− IC
L
,
DLS
R
terminal
i
= TC
L
− IC
R
,
DLS
R
i
= DLS
R
initial
i
+ DLS
R
terminal
i
• Cadence [Steps/min]: step frequency; number of
steps (stepsL, stepsR) during the gait sequence
(duration) related to a one minute walk
cadence = 60 ∗ ((stepsL + stepsR)/duration)
• Velocity [m/s]: the average velocity calculated by
the known distance (l) divided by the duration of
the gait sequence (velocity = l/duration)
• Stride Length (Acc) [m]: stride length calculated
by the integration of the acceleration of the hori-
zontal sensor axis (x-axis)
strideLengthAcc =
RR
a
x
dt
2
• Stride Length (Dist) [m]: known distance (l) di-
vided by the number of steps of the considered leg
strideLengthDist = l/steps
• Stride Length (Vel) [m]: stride duration multi-
plied by determined velocity
strideLengthVel = stride ∗ velocity
As the list above shows the stride length is determined
in different ways. The first calculation method is
based on the double integration of the acceleration in
the horizontal direction (strideLengthAcc). As known
from other investigation (Orlowski and Loose, 2014)
or from the literature (Thong et al., 2002) that inertial
sensors (in particular accelerometer) suffer from
noise and drifts which are accumulated with time
during the integration process. A priori knowledge
or additional sensors are necessary to avoid errors in
the distance estimation (Latt et al., 2011). Due to the
fact that the sensor’s coordinate system rotates during
the swing phase of the leg, a projection would be
Figure 3: Boxplots of the gait parameters swing duration
and stride length (Vel). Left the distribution of the parame-
ter determined by InvestiGAIT and right of the Vicon sys-
tem.
necessary to get the real acceleration in the horizontal
axis. Without this projection an overestimating of
stride length is assumed. Alternatively, the stride
length (strideLengthDist) can be calculated if the
walked distance and the number of steps during
the walking sequence are known or automatically
determined. The stride length is the ratio of the
entire distance and the number of steps. The third
calculation method (strideLengthVel) is the product
of the stride duration (in seconds) and the average
velocity (meter per seconds).
The gait parameters were determined for both legs:
the amputated and the sound leg. Due to the fact that
some of the subjects had the prosthesis on the left and
others on the right side, the investigations referred to
the amputated and sound side.
2.3 Statistics
To investigate the validity of the inertial-sensor
based gait analysis system the values of the gait
parameters were compared with those of the Vicon
system. Therefore, boxplots of each parameter were
prepared. Furthermore, Bland-Altman-Plots were
BIOSIGNALS 2016 - 9th International Conference on Bio-inspired Systems and Signal Processing
258
created to find the mean of differences (MOD), its
standard deviation as well as the limits of agree-
ment (LoA) between the values of both systems
(Atkinson and Nevill, 1998; Bland, 1986). Based on
the Kolmogorov-Smirnov-test the existing datasets
were inspected regarding normal distribution. In
presence of normal distribution the Students T-test
and Pearson’s correlation coefficient was conducted.
Otherwise, in case of not normal distributed data, the
Wilcoxon rank sum test and the Spearmans Rho was
used. The level of significance was set to = 0.05. The
strength of the correlation coefficient is based on the
assessment scheme of Pavetic: weak (r < 0.2), low
(r > 0.2 & r < 0.4), moderate (r > 0.4 & r < 0.7),
strong (r > 0.7 & r < 0.9) and very strong r(> 0.9)
(Pavetic, 2015). Additionally, the standard error of
the mean (SEM) was calculated.
All the calculations and statistical analyses were done
in the MATLAB programming environment.
3 RESULTS
Figure 3 shows the boxplots for the swing duration
and the strideLengthVel of the amputated leg. In both
cases the distribution of the values of both systems
(Inertial and Vicon) seems to be similar. Neverthe-
less, as the further investigation will be shown the dif-
ference of the gait parameter swing duration is more
pronounced than that of the StrideLengthVel.
Tables 1 and 2 present the results of the absolute va-
lidity test in terms of the MOD, its standard devia-
tion, the SEM, the LoA, the p-value of the Wilcoxon
test and the correlation coefficient (Spearmans Rho).
The gait parameters stride duration, cadence, velocity
and strideLengthVel have p-values larger than 0.05 for
both sides (sound and amputated) which means that
these parameters have no significant difference and
show a good agreement with the reference system.
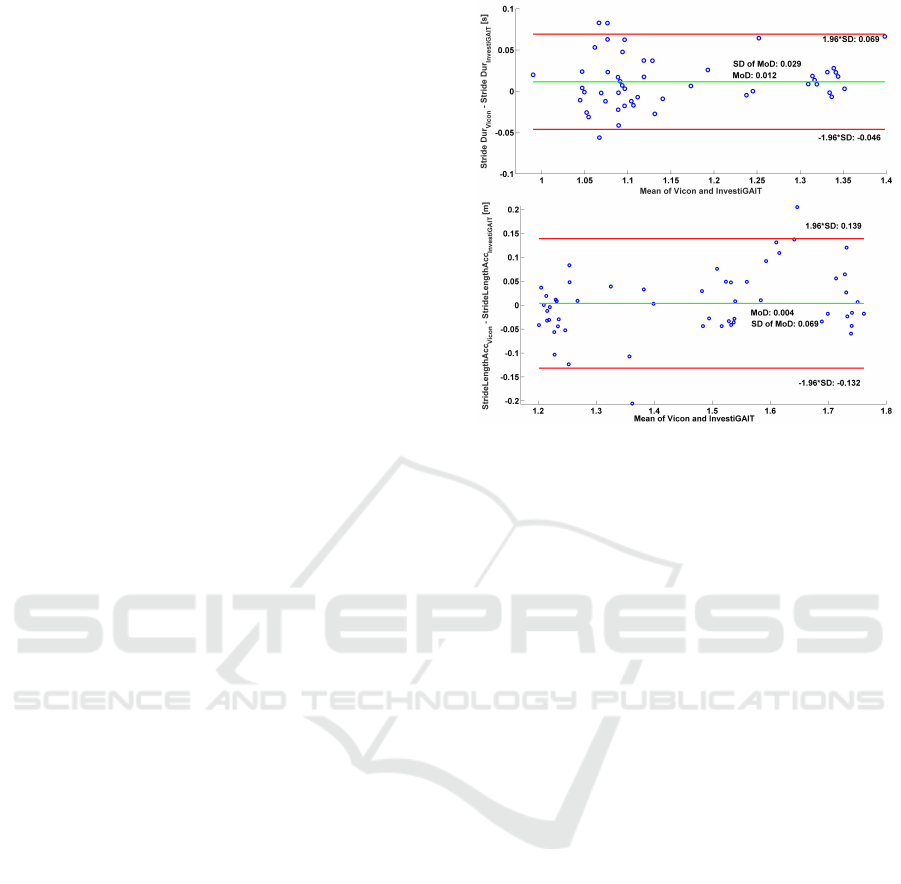
Figure 4 shows the Bland-Altman plots of the gait
parameters: stride duration and stride length (stride-
LengthVel) of the amputated leg. The MOD, its stan-
dard deviation and the LoA is given for each param-
eter. The MOD and its standard are for both param-
eters very small showing a good agreement of both
systems. These parameters are those that show no sig-
nificant difference between both systems (see tables 1
and 2).
For the most gait parameters of both legs the MOD, its
SD and the LoA are similar. As the summarized val-
ues in the tables 1 and 2 demonstrate, there are only
small differences between the gait parameters of the
amputated and sound leg determined by the systems.
Considering the SEM of the gait parameters it is a bit
Figure 4: Bland-Altman Plots of the gait parameters stride
duration and stride length (Vel) of the amputated leg. The
MOD, its standard deviation and the limits of agreement are
presented.
higher for the amputated leg regarding the parame-
ters stride duration, cadence, velocity, and single sup-
port. The values of the gait parameters of the sound
leg determined by InvestiGAIT correlate a bit better
with those values of the chosen reference system Vi-
con than the parameters of the amputated leg. Six
parameters have a large correlation coefficient greater
than 0.7. According to Cohen (Cohen, 1988), these
correlations can be seen as strong.
Tables 1 and 2 depict that the parameter stride-
LengthVel has a good agreement to the stride length
which is determined by the Vicon system. The
p-values larger than 0.05 (p
amputated
= 0.88 and
p
sound
= 0.83) establish that there is no significant dif-
ference between the parameters. In contrast, the other
parameters (strideLengthAcc and strideLengthDist)
show a significant difference. Furthermore, the MOD
is larger than that of the parameter strideLengthVel.
The same applies to the SEM which is larger. It has to
be noted that the parameter strideLengthAcc perform
worst of the three alternatives.
4 DISCUSSION
A complete validity of the gait parameters of the
inertial-sensor based gait analysis system (Inves-
tiGAIT) with gait parameters of the reference
system was not expected because of the different
measurement principals. The gait events, initial and
terminal contact, are determined in different ways
Evaluation of Gait Parameters Determined by InvestiGAIT against a Reference System
259
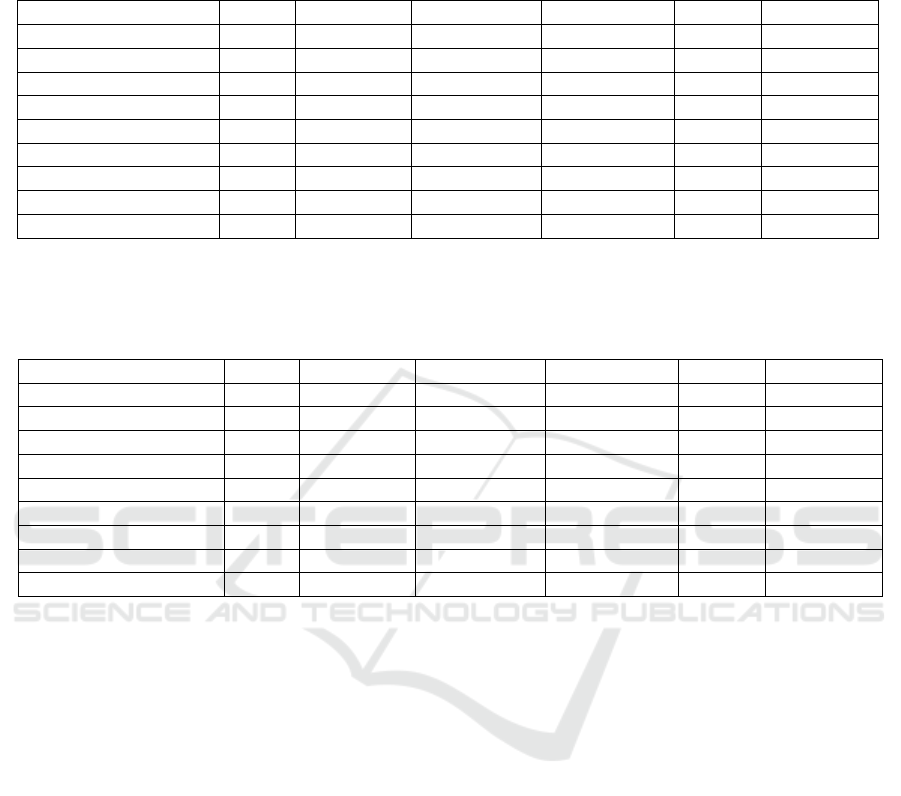
Table 1: Sound leg: Statistical values (Mean of the Difference (MOD), SD of MOD, standard error of the mean (SEM),
limits of agreement (LoA), p-value of the Wilcoxon test, correlation coefficient) for all gait parameters as the difference of
both systems. The asterisk characterizes the values showing no significant difference between the measurements of the two
systems.
param MOD SD (MOD) SEM (95 %) LoA p-value correlation
stride [s] -0.003 0.027 0.037 -0.06 to 0.05 0.779* 0.887
swing [s] -0.137 0.068 0.094 -0.27 to -0.00 0.000 -0.454
single support [s] 0.043 0.026 0.036 -0.01 to 0.09 0.000 0.872
double support [s] -0.161 0.073 0.101 -0.30 to -0.02 0.000 0.565
cadence [steps/min] 0.409 2.664 3.693 -4.81 to 5.63 0.779* 0.887
velocity [m/s] -0.013 0.059 0.081 -0.13 to 0.10 0.839* 0.953
strideLengthAcc [m] 0.496 0.470 0.652 -0.43 to 1.42 0.000 -0.482
strideLengthDist [m] -0.178 0.116 0.160 -0.40 to 0.05 0.000 0.830
strideLengthVel [m] -0.006 0.077 0.107 -0.16 to 0.15 0.834* 0.889
Table 2: Amputated leg: Statistical values based on the difference of both considered systems (mean of differences (MOD), SD
of MOD, standard error of the mean (SEM), limits of agreement (LoA), p-value of the Wilcoxon test, correlation coefficient)
for all gait parameters. The asterisk characterizes the values showing no significant difference between the measurements of
the two systems.
param MOD SD (MOD) SEM (95 %) LoA p-value correlation
stride [s] 0.012 0.029 0.041 -0.05 to 0.07 0.448* 0.841
swing [s] -0.084 0.041 0.057 -0.16 to -0.00 0.000 0.835
single support [s] 0.034 0.044 0.061 -0.05 to 0.12 0.000 0.335
double support [s] -0.218 0.073 0.101 -0.36 to -0.07 0.000 0.358
cadence [steps/min] -0.997 2.882 3.994 -6.65 to 4.65 0.448* 0.841
velocity [m/s] -0.018 0.062 0.085 -0.14 to 0.10 0.811* 0.968
StrideLengthAcc [m] 0.123 0.395 0.548 -0.65 to 0.90 0.001 -0.166
StrideLengthDist [m] -0.114 0.082 0.113 -0.27 to 0.05 0.001 0.882
StrideLengthVel [m] 0.004 0.069 0.096 -0.13 to 0.14 0.881* 0.890
and it is known that IC and TC of both systems are
corresponding but not identical. Consequently, the
derived gait parameters are similar. For the most
of the parameters a small deviation was expected.
Similar results were published by (B
¨
ohme, 2012;
Derlien et al., 2010)
This expectation was confirmed by the results of
the Wilcoxon test whose p-values show a significant
difference between both systems for the most gait
parameters. Although, the other results in terms of
the MOD, SEM and LoA prove the similarity of the
gait parameters determined by the different systems.
The results of the validity examination of
Schwameder et al. (Schwameder et al., 2015)
are similar to our results. The authors present
correlation coefficients and LoA. The correlation
coefficients are comparable and in three cases smaller
(stride duration 0.887 vs 0.986, stride length 0.889
vs 0.951, cadence 0.887 vs 0.981) in one case a
bit smaller (velocity 0.953 vs 0.967) in our system.
Schwameder et al. presented the limits of agreement
for one gait parameter (velocity) in visual way
(Bland-Altman plots) without given the concrete
value. That is why the LoA are hardly comparable to
those achieved in our examination due to the fact that
different speeds of limping walking are integrated in
the analysis. The LoA are slightly narrower (-0.13 to
0.10 vs -0.6 to 0.9) in comparison to our system.
The investigation of the different calculation method
for determining the gait parameter stride length show
remarkable differences between the three methods.
The best agreement with the reference system was
achieved by the parameter strideLengthVel which
involves the stride duration and the average veloc-
ity. The parameter strideLengthAcc which based
on the integration of the horizontal acceleration
demonstrates the worst agreement with the Vicon
measurements. The reasons are that no a priori
knowledge is used in the proposed stride-by-stride
algorithm, no additional sensors, such as magne-
tometers, are used to reliably estimate the position
of the sensor during walking, and a projection of the
acceleration to the horizontal axis was not conducted.
An impact on the missing validity of that parameter is
the chosen position of the sensor on the lower shank.
Other investigations have shown that the double
BIOSIGNALS 2016 - 9th International Conference on Bio-inspired Systems and Signal Processing
260

integration based on shoe-mounted sensors achieved
excellent results in distance estimation (Loose and
Orlowski, 2015b; Loose and Orlowski, 2015a).
Singleton et al. (Singleton et al., 1992) published a
study where they have shown that the prediction of
step time from step length and average velocity is
not a good choice for asymmetric gait patterns. In
contrast to the step length / duration, the stride length
and stride duration used in our algorithm are largely
the same for both legs. Following the effect described
by Singleton has no impact on our algorithm. Based
on the achieved results in the present validity study
using the average velocity and the stride duration for
the determination of stride length, a valid method
is found. Furthermore, the use of average velocity
could affect negatively if the walking velocity is not
constant during the walking sequence. Regarding
further investigations in the clinical environment with
patients having different asymmetries, the problem
depicted by Singleton et al. (Singleton et al., 1992)
should be kept in mind and a valid step length
algorithm should be used in order to examine the
asymmetric gait pattern of the patients.
5 CONCLUSION
At the end of these investigations we can conclude
that the gait parameters determined by the inertial-
sensor based gait analysis system InvestiGAIT show
partly excellent agreement with those parameters de-
termined by the reference system. Based on the re-
sults of the Wilcoxon test the agreement of four pa-
rameters have be presented. Furthermore, other pa-
rameters show a good agreement between the systems
in terms of a strong correlation. Small MOD, SEM
and LoA show similar effects. Consequently, the gait
parameter determined by InvestiGAIT are assumed as
valid and the system can be used in follow-up exami-
nations.
Nevertheless, further investigation are planned with
an adapted attachment of sensors on the subjects’
shoe in order to get a higher conformity of the gait
parameters. Furthermore, these measurements should
be conducted with a group of subjects without any
gait limitations in order to exclude the impact of the
disease. In this connection another method for calcu-
lating stride length proposed by (Mercer and Chona,
2015) should be investigated regarding validity in re-
lation to the reference system. They use the stride
length as the ratio of velocity and stride frequency
which is the number of foot contacts per second mea-
sured in Hertz (Magness, 2010).
ACKNOWLEDGEMENT
The authors would like to thank all the participants
taking part in that preliminary study.
REFERENCES
Atkinson, G. and Nevill, A. M. (1998). Statistical methods
for assessing measurement error (reliability) in vari-
ables relevant to sports medicine. Sports Medicine,
26(4):217–238.
Azad, P. (2009). Visual Perception for Manipulation and
Imitation in Humanoid Robots. Springer.
Bland, J. Martin; Altman, D. G. (1986). Statistical meth-
ods for assessing agreement between two methods of
clinical measurement. The Lancet, 8:307–309.
B
¨
ohme, B. (2012). Studie zur Untersuchung der Va-
lidit
¨
at des neuen Ganganalysesystems RehaWatch der
Firma Hasomed an gesunden Probanden. PhD thesis,
Friedrich-Schiller-Universit Jena.
Cloete, T. and Scheffer, C. (2008). Benchmarking of a full-
body inertial motion capture system for clinical gait
analysis. 30th Annual International IEEE EMBS Con-
ference.
Cohen, J. (1988). Statistical power analysis for the behav-
ioral sciences. (2nd ed.). Hillsdale, NJ: Erlbaum.
Cuesta-Vargas, A. I., Galan-Mercant, A., and Williams,
J. M. (2010). The use of inertial sensors system for
human motion analysis (systematic review). Physical
Therapy Reviews, 15(6):462–473.
Derlien, S., B
¨
ohme, B., and Smolenksi, U. (2010). Va-
lidit
¨
atsuntersuchung zum neuen, innovativen gang-
analysesystem rehawatch von hasomed. Manuelle
Medizin, 48(254-259).
Greene, B. R., McGrath, D., ONeill, R., ODonovan, K. J.,
Burns, A., and Caul?eld, B. (2010). An adaptive
gyroscope-based algorithm for temporal gait analysis.
Med Biol Eng Comput, 48:1251–1260.
Hundza, S. R., Hook, W. R., Harris, C. R., Mahajan, S. V.,
Leslie, P. A., Spani, C. A., Spalteholz, L. G., Birch,
B. J., Commandeur, D. T., and Livingston, N. J.
(2014). Accurate and reliable gait cycle detection in
parkinson’s disease. IEEE transactions on neural sys-
tems and rehabilitation engineering : a publication of
the IEEE Engineering in Medicine and Biology Soci-
ety, 22(1):127–137.
Latt, W. T., Veluvolu, K. C., and Ang, W. T. (2011).
Drift-free position estimation of periodic or quasi-
periodic motion using inertial sensors. Sensors
(Basel), 11(6):5931–5951.
Loose, H. and Orlowski, K. (2015a). Gait patterns in stan-
dard scenarios - using xsens mtw inertial measure-
ment units. 16th International Conference on Re-
search and Education in Mechatronics REM2015.
Loose, H. and Orlowski, K. (2015b). Model based determi-
nation of gait parameters using imu sensor data. Pro-
ceeding of Meachatronic Systems and Material (MSM
2015), 7-9 July 2015, Kaunas, Lithuania.
Evaluation of Gait Parameters Determined by InvestiGAIT against a Reference System
261

Magness, S. (2010). Understanding stride rate and stride
length. http://www.scienceofrunning.com/2010/11/-
speed-stride-length-x-stride-frequency.html, Online:
28.10.2015.
Mannini, A. and Sabatini, A. M. (2012). Gait phase de-
tection and discrimination between walking - jog-
ging activities using hidden markov models applied to
foot motion data from a gyroscope. Gait & Posture,
36:657–661.
Mercer, J. and Chona, C. (2015). Stride lengthvelocity
relationship during running with body weight sup-
port. Journal of Sport and Health Science (2015).
http://dx.doi.org/10.1016/j.jshs.2015.01.003.
Orlowski, K. and Loose, H. (2013). Evaluation of kinect
and shimmer sensors for detection of gait parame-
ters. Proceedings of BIOSIGNALS 2013, Int. Confer-
ence on Bio-Inspired Systems and Signal Processing,
Barcelona, Spain, 11-14 Feb. 2013, pages 157–162.
Orlowski, K. and Loose, H. (2014). Simple algorithms for
the determination or the walking distance based on
the acceleration sensor. Proceedings of BIOSIGNALS
2014, Int. Conference on Bio-Inspired Systems and
Signal Processing, Angers, France, 3-6 March 2014,
pages 264–269.
Pavetic, M. (2015). Streudiagramme und korrelation.
https://www.uni-due.de/imperia/md/content/-
soziologie/stein/uebungsskript deskriptiv-
statistik teil vi.pdf, Online: 28.10.2015.
Richards, J. G. (1999). The measurement of human motion:
A comparison of commercially available systems. Hu-
man Movement Science, 18:589–602.
Schwameder, H., Andress, M., Graf, E., and Strutzen-
berger, G. (2015). Validation of an imu-system (gait-
up) to identify gait parameters in normal and induced
limping walking conditions. International society of
biomechanics in sports.
Singleton, S., Keating, S., McDowell, S., Coolen, B., and
Wall, J. (1992). Predicting step time from step length
and velocity. Australian Physiotherapy, 38(1):43–46.
Thong, Y. K., Woolfson, M. S., Crowe, J. A., Hayes-Gill,
B. R., and Challis, R. E. (2002). Dependence of iner-
tial measurements of distance on accelerometer noise.
Meas. Sci. Technol., 13.
BIOSIGNALS 2016 - 9th International Conference on Bio-inspired Systems and Signal Processing
262
