
A Control Cycle for the Automatic Assisted Positioning of Auscultation
Sensors
Julio Cesar Bellido, Giuseppe De Pietro and Giovanna Sannino
Institute of High Performance Computing and Networking, CNR, Via Pietro Castellino 111, Naples, Italy
Keywords:
Automatic Assisted Sensor Positioning, Real-time Signal Processing, Auscultation, Positioning Logic,
Phonocardiography Sensor Positioning.
Abstract:
The correct positioning of wearable biomedical sensors is crucial in the use of any automatic measurement
systems. The effects of an inaccurate positioning can compromise the quality of the acquired vital waveforms,
like phonocardiograms, and can make ineffective any healthcare application which uses wearable sensors. To
solve this issue, this paper proposes an innovative control cycle for a control cycle to assist patients during the
positioning of an auscultation sensor, a digital stethoscope, for a healthcare monitoring application. The con-
trol cycle runs on a user-friendly app and, through the use of a smartphone camera, suggests the auscultation
sites overlapping the active camera view. In this way, the patient has a real-time feedback to ensure the correct
positioning of the sensor.
1 INTRODUCTION
The increasing availability of wearable technological
resources, computationally competitive and at a mod-
erate cost, makes the realization of mobile computer-
aided analysis and diagnosis systems more and more
possible.
Biomedical sensors, integrated both in commer-
cial and prototypal monitoring solutions, are com-
monly used in a lot of telemedicine applications
in heterogeneous application domains (Patel et al.,
2012). The growth of technology in integrated cir-
cuits manufacturing has brought huge innovations in
embedded and portable sensors and has opened new
interest in emerging application areas like ubiqui-
tous computing and pervasive monitoring (Wickra-
masinghe, 2013). Examples can be found in sev-
eral scientific papers, such as (Black et al., 2004) and
(Hayes et al., 2007).
Due to their specific characteristics, healthcare
systems, for continuous and non-invasive monitoring
of vital parameters and biomedical signals, have con-
solidated their effectiveness through the use of wear-
able sensors and through their integration with Health
Information Systems (HIS). These kinds of sensors,
through the possibility they provide of acquiring data
also during daily behaviour, are highly flexible in the
realization of clinical applications for various patient
profiles according to the individuals’ different charac-
teristics and lifestyles.
In general, during the use of wearable sensors,
such as the auscultation sensors which we are going
to discuss, their accurate positioning is an indispens-
able operating condition to ensure a high fidelity of
the acquired signal and, consequently, to guarantee
a high-quality analysis. Accordingly, any automatic
measuring system that makes use of wearable sensors
must take into account this consideration as an impor-
tant requirement. In fact, the quality of a biomedical
measurement depends both on the sensor sensitivity
and also, principally, on how the patient applies the
sensor.
In the case of a self-monitoring system, it becomes
crucial to consider a control cycle that helps the pa-
tient during the measurements by suggesting the cor-
rect positions of the auscultation sites. Hence, the
idea of focusing the interest of this research study on
the design of an intelligent control cycle to assist the
patient before starting the measurements and during
the signal acquisitions.
This control cycle, embedded in a mobile real-
time auscultation system, helps the patient during
his/her self-auscultation session at his/her own home
without any support from physicians. He/she follows
the visual hints presented by the application to start
and to guide the health monitoring session. If there
is any active interaction with a remote physician, the
control cycle can help to set the proper conditions for
Bellido, J., Pietro, G. and Sannino, G.
A Control Cycle for the Automatic Assisted Positioning of Auscultation Sensors.
In Proceedings of the International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2016), pages 53-60
ISBN: 978-989-758-180-9
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
53

a tele-auscultation service and respects the commit-
ment of promoting patient autonomy in the safeguard-
ing of the right to health.
With these intentions, in order to promote
widespread checks for a large catchment area, we
have chosen to implement the control cycle on mo-
bile devices, like smartphones or PDAs, taking advan-
tage, as we are going to describe, of their hardware,
in terms of interaction and calculation resources.
In summary, the paper investigates the theoretical
and practical conditions, and proposes a control cy-
cle for the assisted positioning of wearable sensors,
in order to help the self-monitoring of vital functions
in any auscultation system.
In the rest of the paper, we will introduce the back-
ground in section 2 and the state of art with its re-
lated works in section 3. In section 4 we will present
the proposed control cycle with the details of the re-
sources and the design choices made. Hints about its
usability and considerations relating to improvements
and performance evaluations will be discussed in sec-
tion 5, in which will be also presented new ideas for
future developments and perspectives. Finally, sec-
tion 6 completes the paper.
2 BACKGROUND
The positioning of sensors, like ECG electrodes or
auscultation sensors for heart or lung sounds monitor-
ing, is commonly supported by the medical staff who
assist the patient during the examination and guaran-
tee the accuracy of the monitoring session.
For a healthcare service remote from the presence
of clinical staff who can oversee the examination, for
example in a remote auscultation solution where the
patient is alone at his/her own home, it becomes nec-
essary to consider a supporting control cycle for the
sensor positioning that ensures the quality and the ac-
curacy of the acquired signals.
The problems related to a positioning logic are due
to the fact that the position of the sensor at the time of
the examination can not be determined without con-
sidering a reference system with respect to which it is
possible to evaluate that position. Therefore, it is use-
ful to make use of an external system that observes the
changes and tracks the positioning of the stethoscope
over time. This observation sensor could be an image
sensor embedded, for example, in a digital camera of
a smartphone.
The idea is to suggest to the patient the ausculta-
tion sites by displaying to him/her, overlapping with
the current active camera view, a map of the Regions
Of Interest (ROIs) dynamically calculated with com-
puter vision algorithms. The control cycle will be
able to recognize the body shape of the patient with a
shape matching algorithm using both chest and back
anatomical models, and a shape transformation in or-
der to redraw the ROIs from the model.
The following section explores the computer vi-
sion concepts used in heterogeneous environments
that we have selected to solve the presented prob-
lem. We have inspected several possible solutions to
choose the most appropriate approach.
3 STATE OF ART
Over the last few years, thanks to the theoretical con-
solidation of digital signal processing techniques and
their implementations, there has been a growing in-
terest in emerging trends that include the interpreta-
tion of optical and radar images for earth monitoring,
character recognition in natural language (Pathak and
Singh, 2014), medical image processing for automatic
diagnosis, and motion tracking for surveillance sys-
tems. However, all these applications solve their tasks
by adopting domain-independent algorithms.
In (Thijs et al., 2007) a technique for position-
ing sensors for acquiring vital parameters of a sub-
ject is presented. The method is based on a refer-
ence signal and a Doppler radar device to acquire a
reference body signal representing a movement of an
object within the subject’s body, the position of the
Doppler radar acquisition device being associated in
a defined way with the position of the sensor, and stor-
ing the acquired reference body signal by means of a
data storage device.
In applications in which object recognition is re-
quired, the most common methods use edge-based
shape detection methods, or adopt a probabilistic ap-
proach to realize an adaptive shape selection.
(Yang et al., 2010) introduce a multi-scale shape
context descriptor to model human body shapes and
measure their similarity in different scales with re-
spect to a predefined human body prototype.
(Hu et al., 2006) present a color-based method for
torso detection in presence of different clothing and
cluttered backgrounds. It extracts the torso by using
a color probability model based on the analysis of the
dominant colors.
Another very interesting paper is (Kumpituck
et al., 2009) in which the authors present a stereo-
based vision system that is used to determine the
stethoscope location on the human body in a car-
diac auscultation tele-diagnostic system. The recon-
struction of the points in the three-dimensional space
has been achieved by using a knowledge of the cam-
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
54
era calibration, image rectification, epipolar geome-
try, and disparity computation.
When there is a stream of moving images, the tar-
get tracking becomes more challenging. In this field,
the computing time plays a decisive role in the de-
tection process. To ensure the real-time property, it
is necessary to have fast algorithms that can return
results on time in order to monitor the environment
without any interruptions or delays.
In a visual surveillance service it may be useful
to detect, track and recognize, in real-time, moving
vehicles and pedestrians. Moving cameras capture a
changing background that complicates the foreground
detection. For this purpose, the paper (Li et al., 2012)
is very helpful. It presents a human shape descriptor
to detect and track human movements from moving
cameras.
In many systems, different open source projects
are supporting the programmer in developing the re-
quired solutions. For example, the Open Source Com-
puter Vision (OpenCV) library contains a set of com-
puter vision functions for digital image processing,
including edge detection algorithms, shape transfor-
mations, and face detection. A brief introduction to
the OpenCV can be found in (Culjak et al., 2012).
The OpenCV API offers the possibility of manipu-
lating the camera in real-time, to obtain a real-time vi-
sual feedback in order to monitor events and actions,
also on mobile platforms. Many scientific papers and
books are focusing on the development of systems for
both academic and commercial use by using this li-
brary. Additionally, our proposed supporting control
cycle uses OpenCV, which has helped us to solve the
shape recognition problem with its camera API. The
implementation uses the OpenCV4Android SDK.
4 THE PROPOSED CONTROL
CYCLE
The proposed control cycle uses the hardware re-
sources of smartphones and tablets to support the pro-
cessing steps. The control cycle suggests the cor-
rect location of the auscultation sites through a visual
feedback system by using only the rear camera of the
mobile device, in the case of the back auscultation, or
only the front camera, in the case of the chest auscul-
tation.
The application draws the map of the ROIs over-
lapping with the current camera view with an adap-
tive control cycle that uses an edge detection tech-
nique and extracts the back/chest edge of the patient
by shaping a reference anatomical model on the de-
tected human back/chest.
To select the real human body edge, the control
cycle implements a similarity model based on corre-
lation measures with respect to the reference model.
Possible problems due to the noise introduced by
the mobile devices camera sensor and by the disconti-
nuity of the background have been taken into account
and solved thanks to the use of digital filters designed
to reduce the spurious contributions that can interfere
with the body edge detection.
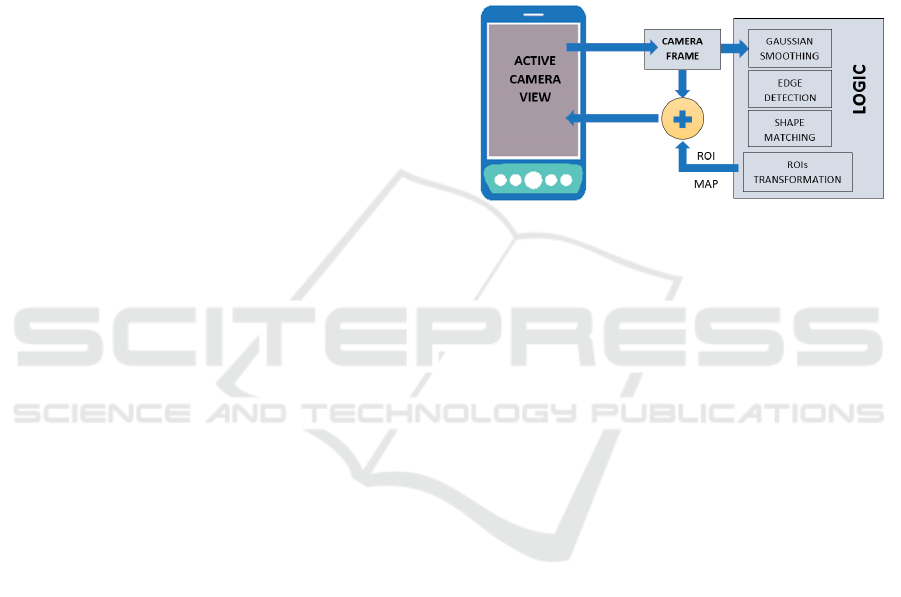
The figure 1 depicts a high-level schema to illus-
trate how the proposed control cycle draws the ROIs
on the active camera view.
Figure 1: High-level schema for drawing ROIs.
The processing chain uses the following steps, il-
lustrated in detail in the next sub-sections of the paper.
In summary, the proposed control cycle:
1. captures the raw camera frames and filters each
frame with a Gaussian smoothing filter;
2. uses an edge detector to extract the multiple edges
from the filtered frames;
3. chooses, from the various edges, the only one cor-
responding to the real human body edge applying
a shape matching algorithm; and
4. draws the ROIs by adapting the information from
the reference chest/back models for the detection
of the human body edge.
The 4-step control cycle runs in an asynchronous
task and notifies its results to the main task for the
drawing of the ROIs. When the asynchronous task is
completed, the main task updates the display with the
information about the position of the calculated ROIs.
From the implementation point of view, the pro-
posed control cycle is able to work in real time, with a
low computational cost, and is runnable on mobile de-
vices with limited resources. Functions computation-
ally more complex are written in native code, C ++,
and invoked on the Android platform through the Java
Native Interface (JNI). For this purpose, the OpenCV
library is useful for us in that it makes available a large
set of computer vision functions written in C++ ready
to be used.
A Control Cycle for the Automatic Assisted Positioning of Auscultation Sensors
55
4.1 The Gaussian Smoothing filter
Starting from the raw frame acquired by the mobile
device camera, the grey-scale converted frame is pro-
cessed with a Gaussian Smoothing filter in order to
reduce the background noise that is included in the
acquired image.
Moreover, due to the geometrical discontinuities
of objects behind the foreground subject, there may
be, in the output of the edge detector, multiple edges
belonging to the background of the image. These spu-
rious responses can introduce false positive and false
negative detections and for this reason, the design of
the filter must be realized with care to avoid, or at least
to reduce, these problems.
In fact, without imposing any constraints on the
usability of the application of which the control cycle
is part, it is necessary to take into account the possi-
bility of having various backgrounds for each situa-
tion. This can add, in the output to the detector, the
presence of unpredictable spurious edges that makes
the identification of the body edge, among all the de-
tected edges, more complicated.
In the absence of a noise model valid in general,
the background noise removal becomes very diffi-
cult in practice due to the unpredictable variability of
the background. The most suitable solution, rather
than breaking down this spurious noise, preserves the
useful information in the foreground, or rather the
chest/back area of the subject on which the control
cycle has to map the regions of auscultation, the ROIs.
The filter performs an average of the pixels in the
image on a number of points fixed by the kernel size
parameter. The standard deviation of the filter defines
the shape of the impulse response and the weights of
the filtering mask.
In general, a digital image a[m, n] described in a
2D discrete space is derived from an analogue image
a(x,y) in a 2D continuous space through a sampling
process that is frequently referred to as digitization.
The 2D continuous image a(x,y) is divided into N
rows and M columns. The intersection of a row and
a column is termed a pixel. The value assigned to
the integer coordinates [m,n] with m=0,1,2,,M1 and
n=0,1,2,,N1 is a[m,n].
Applying the Gaussian Smoothing filter, each out-
put pixel value is set to a weighted average of the
neighbouring pixels. The focal pixel receives the
heaviest weight (having the highest Gaussian value)
and neighbouring pixels receive smaller weights as
their distance from the original pixel increases. This
results in a blur that preserves boundaries and edges
better than other, more uniform blurring filters.
The equation of the Gaussian Smoothing filter in
two dimension is:
G(x, y) =
1
2πσ
2
e
−
x
2
+ y
2
2σ
2
(1)
where x is the distance from the origin in the
horizontal axis, y is the distance from the origin in
the vertical axis, and σ is the standard deviation of
the Gaussian distribution.
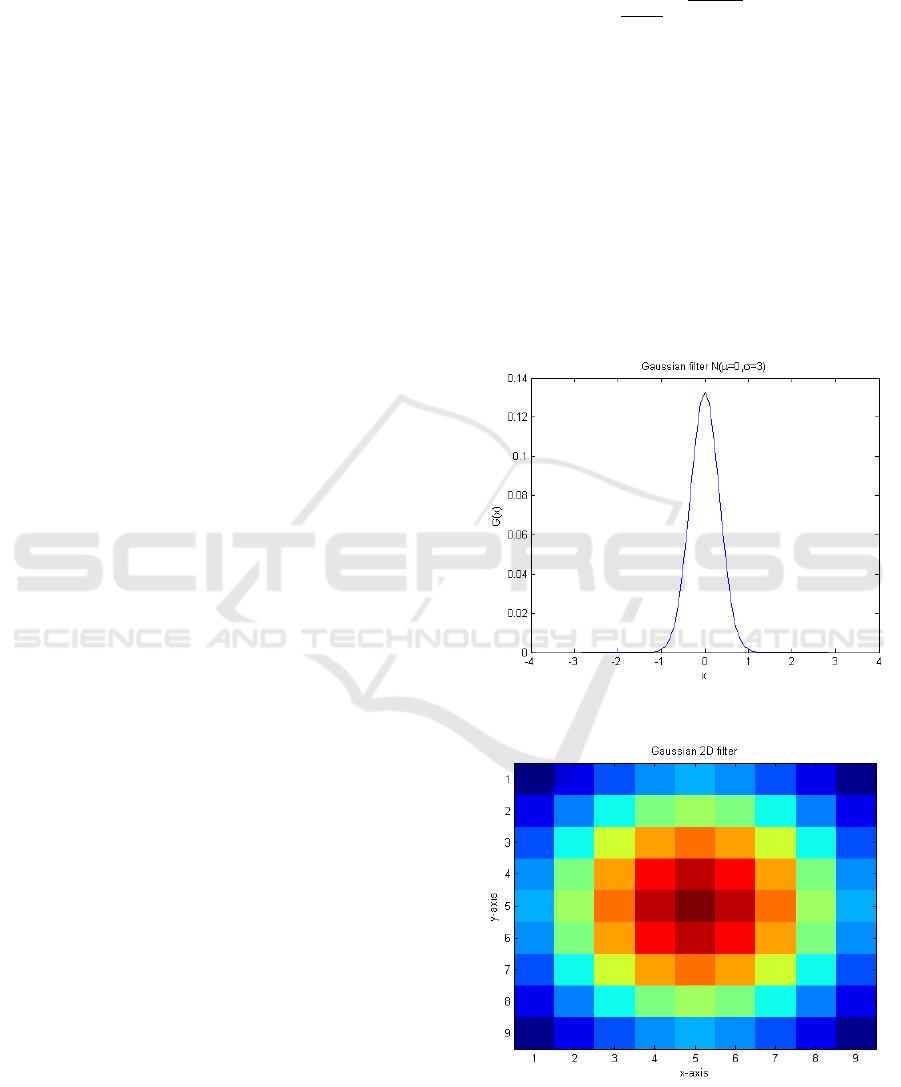
Our choice for the default filter parameters is 9x9
pixels for the kernel size (K) and 3 pixels for the stan-
dard deviation (σ) both in the x-axis and y-axis direc-
tions. Anyway, the parameters are adjustable from the
application interface.
Figures 2 and 3 show respectively the impulse re-
sponse of the Gaussian filter in the x-axis direction
and in the x-y image plane.
Figure 2: Normal distribution with µ = 0 and σ=3.
Figure 3: 2D Gaussian filter.
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
56
4.2 The Edge Detector
After the Gaussian filter, the smoothed frame is in the
input to the edge detector to extract the edges.
The detector uses the multi-stage Canny algorithm
(Canny, 1986), well known in literature as an optimal
detector (Moon et al., 2002) due to its characteristics
of low error detection rate, good edge localization and
minimal response.
The process of the Canny edge detection algo-
rithm includes these following steps:
- Application of a Gaussian filter to smooth the im-
age in order to remove the noise;
- Finding the intensity gradient of the image;
- Application of a non-maxima suppression to get
rid of spurious responses to the edge detection;
- Application of a double threshold to determine the
potential edges;
- Application of a hysteresis threshold to suppress
the weak edges not connected to the strong edges.
However, OpenCV implements the Canny algo-
rithm without the Gaussian filter. The previous Gaus-
sian Smoothing filter introduced in subsection 4.1
subsection covers the first step of the Canny imple-
mentation.
The C++ procedure receives as input the first and
second thresholds for the hysteresis, the aperture size
for the Sobel operator (Matthews, 2002) and a flag to
calculate the image gradient magnitude as an L1 or
L2 norm.
We calculate the gradient magnitude as an L2
norm, without any approximations, with a two Sobel
convolution kernel of 3x3 pixels and two hysteresis
thresholds set in the application preferences.
In the output to the edge detector, there is a grey-
scale image with multiple edges and, among these,
the real body edge. The extraction of this single edge
is performed by the shape matching algorithm.
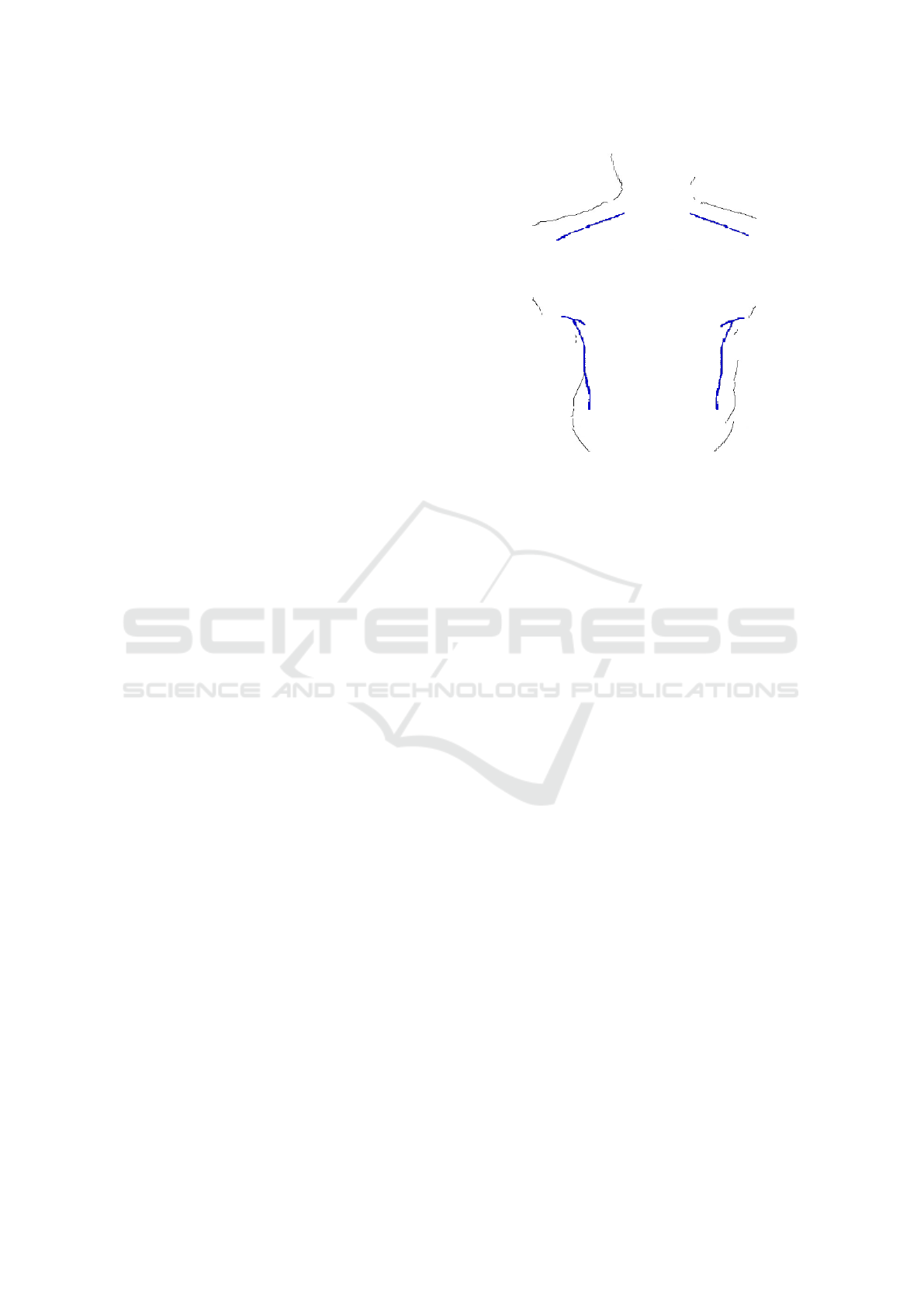
4.3 The Shape Matching Algorithm
In the output to the edge detector we can observe an
image in which all the false positives are external to
the body region and scattered in the background. It
follows that the extraction of the edge corresponding
to the human body shape can be performed by se-
lecting, among all the edges present, the one that ful-
fils a condition of similarity with respect to a model
taken as a reference and placed in the foreground. The
matching works from the inside of the foreground to-
wards the outside of the background.
Several template-based matching techniques to
find similarities among shapes have been explored in
Figure 4: An example of an image obtained from the edge
detector: the static reference anatomical model is visible in
blue.
the literature. (Mahalakshmi et al., 2012) gives an
outline of the general classifications of template or
image matching approaches, which are the Template
or Area-based approaches and the Feature-based ap-
proaches.
Nevertheless, in the current implementation of our
control cycle, the similarity is estimated with a mini-
mum distance criterion: among all edges, we choose
the one for which the pixel-to-pixel distance is the
minimum from a reference shape, in blue in figure 4.
In the output to the shape-matching algorithm, we
have the unique edge that represents the chest/back
shape useful for drawing the auscultation sites within
it.
4.4 Drawing the ROIs
The positions where the ROIs are drawn are dynam-
ically calculated on the basis of geometric informa-
tion acquired from a reference anatomical model, a
static information source, and adapted to the specific
body shape of the patient, that is a dynamic informa-
tion source.
An example of a static anatomical chest table is
shown in figure 5.
We determine the dynamic map or ROIs associ-
ated with the dynamic edge of the human body by
transforming the ROIs found in the static map of the
model. The control cycle inspects the static model
and looks for the ROIs. Then, it returns the central
point of each ROI and applies a coordinate transfor-
mation to map the ROI coordinates from the model
reference system to the human body edge detected.
A Control Cycle for the Automatic Assisted Positioning of Auscultation Sensors
57
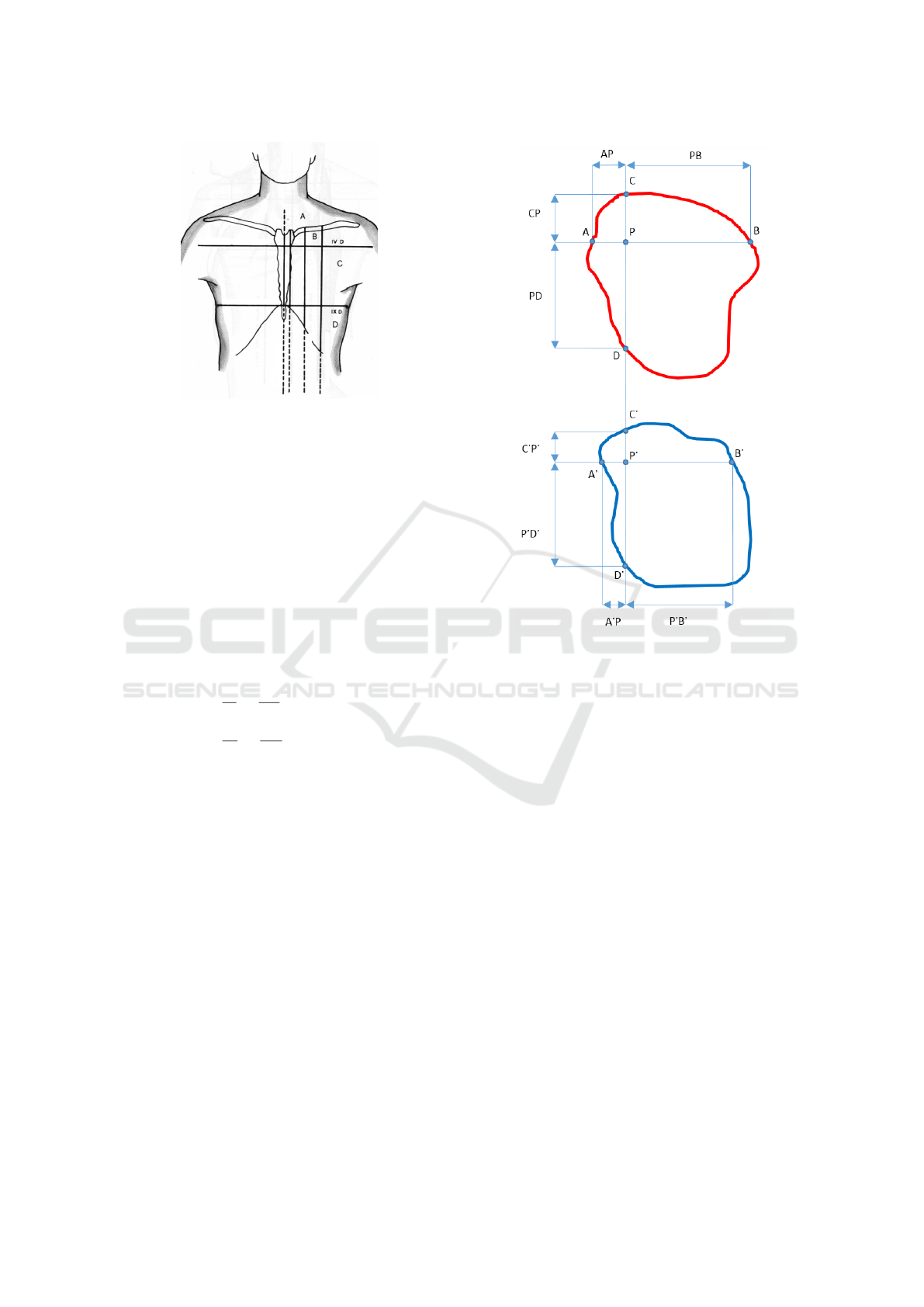
Figure 5: Reference body shape with ROIs.
The ideal transformation is a warping that calcu-
lates the new position of each pixel of the body edge
for each pixel of the reference shape model before
transforming the ROI coordinates. Due to its high
computing time, we prefer to adopt an approximation
by using two linear transformations working in cas-
cade.
Therefore, the coordinate transformation, math-
ematically defined by equations (2) and (3), moves
each point from the reference model to the human
body edge by redrawing each ROI coordinate as
shown in figure 6 that illustrates the geometry of the
transformation.
AP
PB
=
A
0
P
0
P
0
B
0
(2)
CP
PD
=
C
0
P
0
P
0
D
0
(3)
The new coordinates of point P, the center of the
ROI, are calculated as follows: first, the x-coordinate
of the point is calculated with equation (1), and then
the y-coordinate is calculated with equation (2) us-
ing the x-coordinate found through equation (1). The
new coordinates of point P’ are the result of geometric
translations in the plane x-y that rearrange the points
of the ROIs by preserving the proportions between the
two shapes.
5 CONSIDERATIONS AND
FUTURE WORKS
This section give a brief description of the proposed
control cycle from the patients point of view during
a self-auscultation session of his/her chest, and intro-
duce new ideas for future developments.
Once the application is running, the patient posi-
tions himself/herself in front of the smartphone cam-
Figure 6: Point transformation from model to edge.
era and can see his/her image in the active view on the
mobile device display. He/she can choose to activate
the assisted sensor positioning service, and after a few
fractions of a second, the exact waiting time depend-
ing on the computing power of the smartphone used,
he/she visualizes, overlapping with the active view,
the suggestions about the ROIs.
As we have already described, the control cycle
runs on an asynchronous task which notifies the main
task with the positions of the ROIs after a variable
time. We recommend the user not to move during this
time.
The proposed control cycle is based on a shape
matching with a static shape and a dynamic adjust-
ment of the ROIs through two linear transformations.
A full dynamic control cycle, which does not require
any constraint on the position of the user with respect
to the static shape model, considers the replacement
of the static matching block with a dynamic control
cycle based on face detection. With dynamic shape
positioning, the model will be shifted along the ver-
tical axis in the plane of the camera view according
to the shoulder level evaluated by the face detection
results. With this new control cycle, the model dy-
namically fits its position to the current position of
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
58

the user.
Possible improvements of the presented control
cycle could involve the filtering and the shape match-
ing algorithms. Other possible enhancements could
be the adopting of spatially-variant filters to manipu-
late the selective properties of the smoothing filter for
the noise reduction. In this case, the coefficients of
the filtering mask depend on the location of the pix-
els in the input image. A theoretical formulation that
faces with this issue and uses anisotropic diffusion is
described in (Perona and Malik, 1990).
Finally, to improve the selectivity of the shape
matching algorithm, we are considering to design spe-
cific static models taking account the gender and the
different body types of the patients.
As regards the performance evaluation of the sup-
porting control cycle, we are evaluating two different
criteria. First, we are measuring the accuracy of the
positioning, by checking the quality of the acquired
waveforms in various tests. In relationship to this lat-
ter aspect, we are inspecting the regularity of charac-
teristic parameters that could be calculated by the ac-
quired waveform, the phonocardiogram, such as the
average frequency and the information content of its
power spectrum. Secondly, we are considering the us-
ability of our supporting control cycle in terms of the
time saved for each acquisition.
The usability test, together with the accuracy test
on the waveform captured, will give us an important
feedback on how our innovative control cycle tries
to solve the sensor positioning issue in an automatic
way.
6 CONCLUSIONS
Telemedicine, as a support for improving a patients
quality of life, makes use of new solutions of non-
invasive and continuous monitoring with wearable
sensors.
The characteristics of these sensors help us to
monitor the health of the patient by collecting more
data during the day and the night. Behaviours and
habits during the illness can thus be tracked and used
to build a clinical profile more accurate for the pa-
tient. Additionally, the real-time acquisition of clini-
cal data helps to build new Electronic Health Records
of patients and gives the possibility to realize auto-
matic analysis and diagnosis systems to promptly as-
sist them.
As a support for the monitoring, this paper has in-
troduced a new control cycle to meet the operational
requirements of wearable sensors in an auscultation
system. The control cycle assists the patient to select
the right position of the auscultation sites on his/her
own chest or back before starting the signal acquisi-
tion.
With use of a mobile device, such as a smartphone
or a PDA, and its camera, the presented control cy-
cle maps the Region Of Interests, corresponding to
the positions of the auscultation sites, on the active
camera view. In real-time, on the smartphone display,
these visual hints are shown and the patient knows
where he need to place the stethoscope. This is the
initial condition to start a session to monitor the heart
sounds, with front camera in self-monitoring mode,
or to monitor the lung sounds, with back camera.
In the prospective of a medical tele-consulting ser-
vice, the positioning logic will be part of the prerequi-
sites of a real-time tele-auscultation application (Bel-
lido et al., 2015).
The solution will extend the control cycle of its in-
telligent layer with the smart interaction of the cam-
era, here proposed, to give the positioning feedback
to help the patients.
Accordingly, at his/her own home, the patient will
be able to enjoy an easier healthcare in ways and at
times meeting his/her own requirements, in autonomy
and independence.
REFERENCES
Bellido, J. C., De Pietro, G., and Sannino, G. (2015). A
prototype of a real-time solution on mobile devices for
heart tele-auscultation. In Proceedings of the 8th ACM
International Conference on PErvasive Technologies
Related to Assistive Environments, page 30. ACM.
Black, J., Segmuller, W., Cohen, N., Leiba, B., Misra, A.,
Ebling, M., and Stern, E. (2004). Pervasive computing
in health care: Smart spaces and enterprise informa-
tion systems. In MobiSys 2004 Workshop on Context
Awareness.
Canny, J. (1986). A computational approach to edge detec-
tion. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, (6):679–698.
Culjak, I., Abram, D., Pribanic, T., Dzapo, H., and Cifrek,
M. (2012). A brief introduction to opencv. In MIPRO,
2012 Proceedings of the 35th International Conven-
tion, pages 1725–1730. IEEE.
Hayes, T. L., Pavel, M., Larimer, N., Tsay, I. A., Nutt, J.,
and Adami, A. G. (2007). Distributed healthcare: Si-
multaneous assessment of multiple individuals. IEEE
Pervasive Computing, (1):36–43.
Hu, Z., Lin, X., and Yan, H. (2006). Torso detection in static
images. In Signal Processing, 2006 8th International
Conference on, volume 3. IEEE.
Kumpituck, S., Kongprawechnon, W., Kondo, T.,
Nilkhamhang, I., Tungpimolrut, K., and Nishihara, A.
(2009). Stereo based vision system for cardiac auscul-
A Control Cycle for the Automatic Assisted Positioning of Auscultation Sensors
59

tation tele-diagnostic system. In ICCAS-SICE, 2009,
pages 4015–4019. IEEE.
Li, C., Xu, Y., Shi, X., and Wu, S. (2012). Human
body detection and tracking from moving cameras.
In Biomedical Engineering and Informatics (BMEI),
2012 5th International Conference on, pages 278–
281.
Mahalakshmi, T., Muthaiah, R., Swaminathan, P., and
Nadu, T. (2012). Review article: an overview of tem-
plate matching technique in image processing. Re-
search Journal of Applied Sciences, Engineering and
Technology, 4(24):5469–5473.
Matthews, J. (2002). An introduction to edge detection: The
sobel edge detector.
Moon, H., Chellappa, R., and Rosenfeld, A. (2002). Op-
timal edge-based shape detection. Image Processing,
IEEE Transactions on, 11(11):1209–1227.
Patel, S., Park, H., Bonato, P., Chan, L., Rodgers, M., et al.
(2012). A review of wearable sensors and systems
with application in rehabilitation. J Neuroeng Rehabil,
9(12):1–17.
Pathak, M. and Singh, S. (2014). Implications and emerging
trends in digital image processing. International jour-
nal of computer science and information technologies,
5.
Perona, P. and Malik, J. (1990). Scale-space and edge de-
tection using anisotropic diffusion. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
12(7):629–639.
Thijs, J. A. J., Such, O., and Muehlsteff, J. (2007). System
and method of positioning a sensor for acquiring a vi-
tal parameter of a subject. US Patent App. 12/376,319.
Wickramasinghe, N. (2013). Pervasive computing and
healthcare. In Pervasive Health Knowledge Manage-
ment, pages 7–13. Springer.
Yang, F., Lu, Y., and Li, B. (2010). Human body detection
using multi-scale shape contexts. In Bioinformatics
and Biomedical Engineering (iCBBE), 2010 4th In-
ternational Conference on, pages 1–4.
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
60
