
Deployment over Heterogeneous Clouds with TOSCA and CAMP
Jose Carrasco, Javier Cubo, Ernesto Pimentel and Francisco Dur
´
an
Dept. Lenguajes y Ciencias de la Computaci
´
on, Universidad de M
´
alaga, M
´
alaga, Spain
Keywords:
Cloud Applications, Cross-cloud, Cross-deployment, Standards, TOSCA, CAMP.
Abstract:
Cloud Computing providers offer diverse services and capabilities, which can be used by end-users to com-
pose heterogeneous contexts of multiple cloud platforms to deploy their applications, in accordance with the
best offered capabilities. However, this is an ideal scenario, since cloud platforms are being conducted in an
isolated way by presenting interoperability and portability restrictions. Each provider defines its own API,
non-functional requirements, QoS, add-ons, etc., and developers are often locked-in a concrete cloud environ-
ment, hampering the integration of heterogeneous provider services to achieve cross-deployment. This work
presents an approach to deploy cross-cloud applications by using standardisation efforts of design, manage-
ment and deployment of cloud applications. Specifically, using mechanisms specified by the TOSCA and
CAMP standards, we propose a methodology to describe the topology and distribution of modules of a cloud
application and to deploy the inter-connected modules over heterogeneous clouds. We present our prototype
TOMAT, which supports the automatic distribution of cloud applications over multiple providers.
1 INTRODUCTION
Cloud Computing (Armbrust et al., 2010) is the re-
sult of the evolution of different paradigms and tech-
nologies, such as Virtualisation, Client-Server Model,
Peer-to-Peer, or Grid-Computing. It has become a
key component in the new Internet, by establishing
a model for business services that allows a suitable
and on-demand network access to a shared pool of
configurable computing resources that can be rapidly
provisioned (Mell and Grance, 2011). In this model,
providers expose theirs resources as services through
a cloud infrastructure. Hence, many providers are of-
fering cloud-oriented services, from big companies
such as Amazon, Google, or Microsoft, to small play-
ers. Then, developers may use these cloud resources
to host and deploy the infrastructure and application
modules in specific providers, taking advantage of
the elasticity and scalability of the clouds. In fact,
in an ideal scenario, users could select the services
from several providers whose properties and capabil-
ities best fit the requirements of every module of the
application, by enabling a flexible and multiple de-
ployment, as addressed in, e.g., (Brogi et al., 2014).
Cross-cloud application deployment is a complex
task, since cloud platforms are being conducted in
an isolated way, presenting many interoperability and
portability restrictions, and offering similar resources
differently. Providers define their own APIs to expose
services, non-functional requirements, QoS, add-ons,
etc. As a result, cloud developers are often locked-in
specific services from some concrete cloud environ-
ment, complicating the integration of heterogeneous
provider services to achieve a cross-deployment of
cloud applications (Petcu, 2011), and making almost
impossible to consider the possibility of migrating
components between different platforms.
Organizations like IEEE and OASIS have pro-
posed different approaches to mitigate these issues
through the homogenization and normalization of
the description and management of cloud applica-
tions. We find of particular interest two OASIS
standards, namely TOSCA (Topology and Orchestra-
tion Specification for Cloud Applications) (OASIS,
2012b) and CAMP (Cloud Application Management
for Platforms) (OASIS, 2012a). These standards de-
fine methodologies to describe and wrap the structure
of cloud applications (components and relationships),
and how they must be orchestrated (using plans) in
a portable way to increase a vendor-neutral ecosys-
tem. However, although they describe the mecha-
nisms that must be implemented by the clouds to sup-
port standard-based application deployment and man-
agement, they do not have official implementations.
Partial support for them is available through, e.g.,
OpenTOSCA (Binz et al., 2013) and Alien4Cloud
1
1
Alien4Cloud: http://alien4cloud.github.io/.
170
Carrasco, J., Cubo, J., Pimentel, E. and Durán, F.
Deployment over Heterogeneous Clouds with TOSCA and CAMP.
In Proceedings of the 6th International Conference on Cloud Computing and Services Science (CLOSER 2016) - Volume 1, pages 170-177
ISBN: 978-989-758-182-3
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

for TOSCA, and Apache Brooklyn
2
for CAMP.
TOSCA is a good option for representing the
topology and orchestration of applications. However,
the management of a possible TOSCA-compliant de-
ployment could be a complex task. Since TOSCA
does not enforce specific interfaces for node tem-
plates, which represent the provider’s resources, the
topology and orchestration plan may need to be mod-
ified when some module of the application is decided
to be deployed on a different target provider.
Even if considering what the standard calls declar-
ative plans, as we will see in Section 2.1, the TOSCA
specification of the topology requires using node tem-
plates for specific providers, what prevents the spec-
ification from being agnostic. Moreover, although
by using appropriate node templates we may specify
and deploy cross-cloud TOSCA configurations, we
need to take into account how providers services are
managed by TOSCA, and how components are de-
ployed and their interactions handled. OpenTOSCA
requires each operation in the node types modeling
provider resources to include the necessary mecha-
nisms. Alien4Cloud uses Cloudify
3
as cloud service
orchestrator for the providers interaction, what allows
using a generic node type to model cloud services.
However, the implementation artefacts correspond-
ing to the operations of the node templates must be
adapted to work with such an orchestrator. Although
with Alien4Cloud the definition of node types is much
simpler, the set of target providers is limited to those
supported by the orchestrator.
We are interested in application models in which
we do not need to lock to a specific vendor, and
want to be able to postpone our deployment deci-
sion as much as possible, even opening the door to
potential migration of individual components at run-
time. Although cross-deployment was not one of
the goals of the existing CAMP-compliant solutions,
they follow a unified API which wraps the inter-
face of cloud providers (e.g., Brooklyn uses Apache
jClouds
4
). Nevertheless, CAMP lacks of a topology
specification, which is crucial to maintain the applica-
tion model at run-time, key if monitoring and recon-
figuration actions are to be performed over the appli-
cation distribution.
Although both standards present weaknesses, we
believe they nicely complement each other, and can
be used together in real scenarios. We propose
the combined use of TOSCA and CAMP specifi-
cations and their respective approaches by using a
transformation-based platform-agnostic model. Our
2
Brooklyn: https://brooklyn.apache.org/.
3
Cloudify: http://getcloudify.org/.
4
jClouds: http://jclouds.apache.org/.
solution automatizes the translation between both
standards by using a transformation model, providing
structural and design advantages for the topology de-
scription using (agnostic) TOSCA, and benefits of the
run-time management using CAMP. Specifically, we
combine the advantages of TOSCA’s powerful mod-
eling language to describe the structure of an appli-
cation as a typed topology graph, in a portable and
vendor-agnostic way, and simplifying the manage-
ment and reusability of services thanks to its topology
templates and node types, with CAMP’s facilities for
managing heterogeneous providers’s features in a ho-
mogeneous way thanks to its approach for the unifica-
tion in the interfaces of cloud platforms. Preliminary
results related to our proposal were presented in (Car-
rasco et al., 2015).
The rest of this paper is structured as follows. Sec-
tion 2 presents a brief introduction to TOSCA and
CAMP. Section 3 presents the proposal, using exam-
ples to illustrate the approach. We wrap up in Sec-
tion 4 by presenting some conclusions and some ideas
for future development.
2 SOME BACKGROUND
In this section, we briefly present the TOSCA and
CAMP standards, mainly focusing on their strengths
and limitations.
2.1 The TOSCA Standard
The TOSCA standard (OASIS, 2012b) provides a
model for the description of cloud applications, the
corresponding services, and their relationships using
a service topology, as well as the description of pro-
cedures to manage services using orchestration pro-
cesses by using plans.
As depicted in Figure 1, in TOSCA, services are
specified through service templates, by using node
and relationship templates, which are concrete com-
ponents of the application of corresponding node and
relationship types. A Node Type expresses the ca-
pabilities, requirements, properties and interfaces of
the services. Relationship Types are used to specify
relationships between the elements of the system by
means of a set of relations, which allow determin-
ing the connections and dependencies between com-
ponents, taking into account their properties and in-
terfaces. Type definitions include operations to de-
scribe their behavior, e.g., a server may define a start
operation to initialize the execution, and another one
to allow the deployment of applications inside itself.
Deployment over Heterogeneous Clouds with TOSCA and CAMP
171

Figure 1: TOSCA Service Template elements.
Figure 2: Chat App TOSCA topology (using Winery).
1 <NodeTemplate id="JBossMainWebServer"
2 name="JBoss Main Web Server"
3 type="JBossWebServer">
4 <Properties>
5 <ns2:JBossWebServerProperties>
6 <httpPort>80</httpPort>
7 </ns2:JBossWebServerProperties>
8 </Properties>
9 <Capabilities>
10 <Capability
11 id="JBossMainWebServer_webapps"
12 name="webapps"
13 type="JBossWebAppContainerCapability"/>
14 </Capabilities>
15 </NodeTemplate>
Listing 1: JBoss node template.
Then, templates specify the concrete features of com-
ponents, e.g., their properties and restrictions.
Figure 2 shows the TOSCA topology, using Win-
ery (Kopp et al., 2013), for a very simple Chat Ap-
plication composed by two modules, namely a web-
page and a database. We use this example through-
out our paper to illustrate the different aspects of our
approach. In the example, we suppose we will de-
ploy the webpage on Amazon AWS and the database
on SoftLayer. The code in Listing 1 shows the XML
TOSCA description of the node template for the web-
page corresponding to a JBoss component.
In TOSCA templates, we can also specify orches-
tration plans. The plan specifies the operation calls of
components to instantiate the structure of the topol-
ogy. In the TOSCA standard, the values for the prop-
erties of node and relationship templates in a topology
template can come from input passed in by users, by
automated operations, or by specified default values.
A TOSCA-based description is packaged in a con-
tainer file, called a CSAR (Cloud Service Archive).
CSARs have a fix structure to allow portability be-
tween providers. To establish a homogeneous envi-
ronment of clouds for deployment of CSARs, TOSCA
defines a set of best practices to adapt the standard to
services offered by cloud providers
2.2 The CAMP Standard
The CAMP standard (OASIS, 2012a) focuses on the
deployment, management and monitoring of cloud
applications, regardless of the used platform. Its main
purpose is to allow the interoperability of interfaces
of cloud platforms defining a unified API to be im-
plemented by each platform supporting the standard.
In such a way, developers and independent platforms
could create services and mechanisms to interact with
other platforms by adapting the CAMP specification
and using their interfaces.
With its API, CAMP describes elements to model
applications and the services and platforms used for
deployment, providing the basis to mitigate the porta-
bility/interoperability problems. CAMP specifies
models for platform, resources, services, sensors and
operations. The platform represents the layer at the
top of the platform under execution, and references
the resources that represent the functionality provided
by the platform, the applications running on this plat-
form, and the metadata that describe the resources
supported by the platform and the extensions by the
provider. Resources can be implemented by means
of the API provided by the cloud platform with dif-
ferent concepts (assemblies or components). Services
are used to interact with the platform, representing the
creation and management of resources (e.g., deploy a
Web application). Following the goal of facilitating
the management and monitoring of deployed systems,
CAMP defines sensors, which through a RESTful in-
terface give access to different metrics on the status
of the application components. Operations represent
actions that can be taken on resources. By combining
sensors and operations, CAMP proposes the use of
policies for self-management: operations depending
on the information collected by sensors.
As TOSCA, CAMP defines a packaging artifact
for application models and elements for the deploy-
ment called PDP (Platform Deployment Package).
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
172

1 services:
2 - serviceType: org.apache.brooklyn.entity.webapp.jboss.
JBoss7Server
3 name: JBoss Main Web Server
4 location: aws-ec2:us-west-2
5 id: JBossMainWebServer
6 brooklyn.config:
7 port.http: 80+
8 port.https:3344+
Listing 2: Brooklyn description of a JBoss Server.
An application PDP contains its deployment plan in
a YAML file, platform elements used during the life-
cycle, and credential files. This description is done
over CAMP’s API to ensure portability.
Although there is no official CAMP implementa-
tion, Apache Brooklyn
2
supports almost all features
and concepts in CAMP. Brooklyn is a framework
for modeling, managing and monitoring applications,
which offers a unified API, and allows the modeling
of application modules and its infrastructure for de-
ployment and monitoring. Brooklyn’s API is built
over jClouds, an open source cross-cloud toolkit to
create platform-independent applications, which en-
sures the interoperability and portability with more
than 30 different providers.
Brooklyn provides support for deploying applica-
tions, once the deployment location of each appli-
cation module has been specified, providing support
for establishing and maintaining the relationships be-
tween the different modules. This facility may be
used for performing heterogeneous deployment, us-
ing services of multiple providers. We have indeed
used this facility to partially solving the portability
and interoperability problems between services, and
to facilitate the complicated deployment in TOSCA.
Listing 2 shows the Brooklyn YAML excerpt describ-
ing a JBoss server for the webpage (corresponding
to the TOSCA template in Listing 1) using a com-
mon API. As specified in Line 4, the component is re-
quested to be deployed on aws-ec2:us-west-2, Ama-
zon’s datacenter at Oregon, US.
3 CROSS-DEPLOYMENT OF
CLOUD APPLICATIONS
In this section, we present our proposal for improving
interoperability and reducing portability problems of
heterogeneous clouds.
3.1 Overview of our Approach
The main goals and advantages of our approach are:
Topology Description. We consider applications
composed of several modules or components,
with relationships and dependencies between
them. We propose using TOSCA for the
specification of the application’s topology and
its distribution. This allows us maintaining
the application structure independently of the
cloud services used along the life-cycle of the
application.
Portability and Interoperability. Dealing with a
multiple deployment and heterogeneous distribu-
tion, portability and interoperability problems oc-
cur due to restrictions imposed by used services.
Developers may need to adapt their systems (ap-
plications, services, components) to the interfaces
of the specific cloud providers used for deploy-
ment. By following CAMP’s philosophy, we mit-
igate this dependency through a common API
wrapping and unifying cloud service features and
requirements offered by a large number of diverse
providers. Heterogeneity will be directly dealt
with by managing cloud services in a homoge-
neous way.
Scalability and Elasticity. Our approach considers
the scalability and elasticity benefits of multiple
providers by using the most appropriate cloud to
deploy each application module, and giving ac-
cess to the facilities provided by each of them.
Figure 3 presents the overview of our approach
to cross-deployment through the combined use of
the TOSCA and CAMP standards. The proposed
methodology consists of two main phases. In the first
phase, Topology Description, the topology of an ap-
plication is exhaustively defined using TOSCA (1).
In the second phase, Translation and Deployment,
the application modules are distributed over selected
cloud providers using the CAMP-based deployment
strategy implemented in Brooklyn. To solve the in-
compatibility problems between the TOSCA-based
XML topology and the CAMP-based YAML deploy-
ment plan, we have modeled and developed a transla-
tion process based on an agnostic graph (2). As ex-
plained in the coming sections, the graph is built on
an abstraction of the application topology, providing
a representation independent of the specific used de-
ployer, Brooklyn in this case. The use of these graphs
also simplifies the translation process from TOSCA to
CAMP, which finally generates the CAMP-compliant
deployment plan expected by Brooklyn (3). Brooklyn
is then in charge of deploying the given application,
using jClouds to enable provider-independent deploy-
ment, and cross-deployment if required.
Deployment over Heterogeneous Clouds with TOSCA and CAMP
173
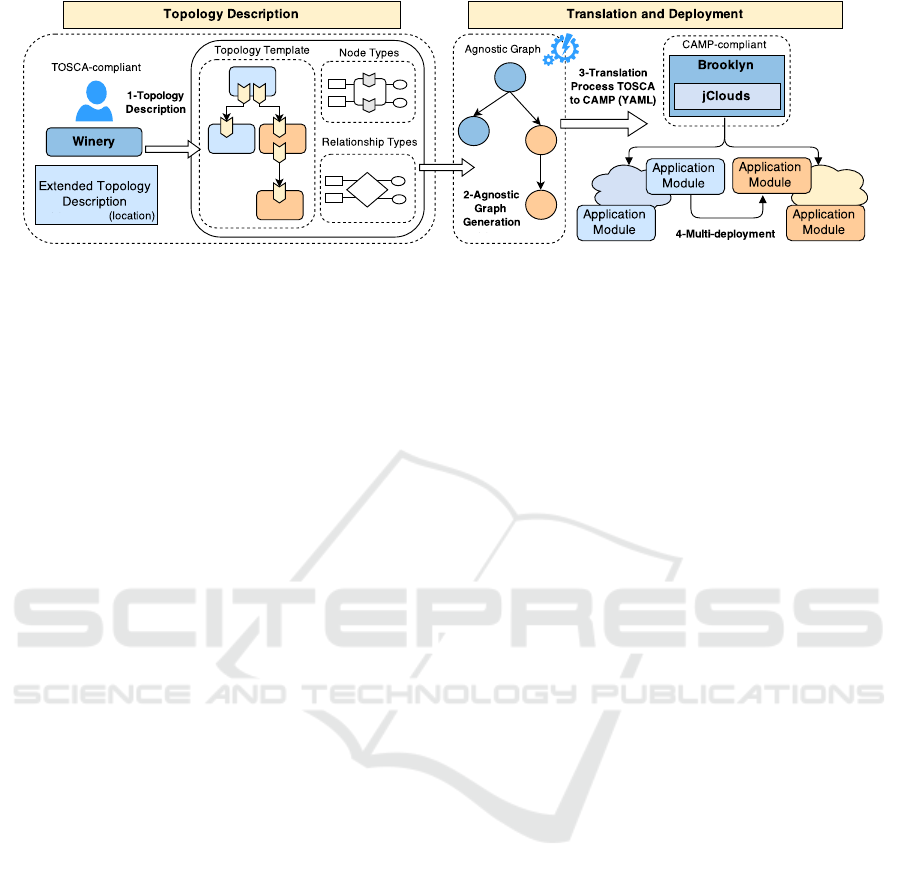
Figure 3: Overview of the methodology for cross-deployment.
3.2 TOSCA-compliant Topology
We use TOSCA to obtain a full description of the ap-
plication by modeling its modules and dependencies.
TOSCA descriptions are composed of components,
which present types, properties, requirements, capa-
bilities, and relationships between them.
TOSCA allows the specification of a detailed ap-
plication topology using XML files. Although it has
the advantage of providing the flexibility to design
any component that an application may require, the
modification, removal or addition of components in a
topology may become a cumbersome task. We pro-
pose the use of graphical tools such as Winery (Kopp
et al., 2013), from the OpenTOSCA environment, for
these tasks. Winery provides support for the graph-
ical generation of TOSCA-based application topolo-
gies and their maintenance.
For describing a topology, TOSCA does not pro-
vide any mechanism to specify the target provider to
deploy application modules. Instead, NodeTypes de-
fine an orchestration plan and the implementation ar-
tifacts to specify the deployment operations. These
artifacts define the specific distribution of the compo-
nents implementing the logic to perform the deploy-
ment.
We described on Section 1 as the providers to be
used to deploy our components on can be defined
and replaced on some TOSCA-compliant approaches.
However, the definition and maintenance of an or-
chestration plan is a complex and error-prone task.
TOSCA imperative plans have to define each neces-
sary step to deploy and configure the application, tak-
ing into account all the properties and requirements of
the providers. TOSCA declarative plans need to add
new implementation artifacts to modify the the oper-
ations of node templates. Thus, if we need to change
the cloud providers on which modules are to be de-
ployed, the plan’s operations should be accordingly
modified, since the modification of the providers is
performed by substituting the artifacts that implement
the deployment operations.
Our proposal does not need to run these artifacts
though, and therefore, we do not need the required
robust logic to infer the distribution information from
them. But we instead need a mechanism to clearly
specify the final provider each of the node templates
is to be deployed on.
TOSCA allows the specification of properties to
specify the way in which applications are going to
behave, e.g., to achieve specific service level objec-
tives. Indeed, the possibility of adding further proper-
ties to node templates is one of the main arguments
of TOSCA’s flexibility. We take advantage of this
possibility and specify the location to which node
templates are to be deployed as properties of node
templates. By defining these properties, we get all
the information we need to generate the correspond-
ing CAMP specifications. Note that this flexibility,
however, involves an even higher complexity in the
TOSCA orchestration plan, since the plan must spec-
ify the management of all the properties according to
the system configuration.
Listing 3 shows how the TOSCA XML specifi-
cation of the JBoss node template in Listing 1 has
been extended to specify the location to be deployed
at (Line 7). With this specification, it will be deployed
on Amazon AWS, using Oregon’s clusters. A descrip-
tion as the one shown in Listing 2 can now be auto-
matically generated.
3.3 TOSCA2CAMP Transformation
CAMP provides support for the deployment over het-
erogeneous clouds, solving interface incompatibili-
ties through a unified API. By performing a transfor-
mation from TOSCA to CAMP elements, we take ad-
vantage of this capability to deploy TOSCA specifi-
cations over multiple cloud providers.
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
174

1 <NodeTemplate id="JBossMainWebServer"
2 name="JBoss Main Web Server"
3 type="JBossWebServer">
4 <Properties>
5 <ns2:JBossWebServerProperties>
6 <httpPort>80</httpPort>
7 <location>aws-ec2:us-west-2</location>
8 </ns2:JBossWebServerProperties>
9 </Properties>
10 <Capabilities>
11 <Capability
12 id="JBossMainWebServer_webapps"
13 name="webapps"
14 type="JBossWebAppContainerCapability" />
15 </Capabilities>
16 </NodeTemplate>
Listing 3: Node Template enriched with Location.
1 - service: agnostic.service.type.server.JBossServer
2 name: JBoss Main Web Server
3 location: aws-ec2:us-west-2
4 id: JBossMainWebServer
5 properties:
6 - id: http
7 type: port
8 value: 80
9 - id: https
10 type: port
11 value: 3344
Listing 4: Agnostic description of a JBoss server.
3.3.1 Agnostic Graph Generation
In the translation process, we use an intermediate ag-
nostic graph to abstract system information to get a
technology-independent intermediate representation
of applications. This representation is independent
both from TOSCA and CAMP description types,
what would allow us to reuse the transformation to
such an agnostic graph or the one from it, e.g., to tar-
get CAMP providers other than Brooklyn.
The topology of an application is abstracted as de-
picted in step (2) in Figure 3. The information in each
component is included as a node of the graph, without
reference to TOSCA elements, and using the edges to
specify the relationships between them.
Listing 4 shows a textual representation of the ag-
nostic graph as obtained from the JBoss node tem-
plate in Listing 3.
3.3.2 Types and Properties
Service types of agnostic components are represented
by technology-independent agnostic identifiers. E.g.,
agnostic.service.type.server.JBossServer is used to
type a JBoss server in the definition in Listing 4. Sim-
ilar mappings for each concrete TOSCA type into its
corresponding agnostic type provides the necessary
transformation rules.
One important aspect in the correlation between
TOSCA and agnostic components is the management
of properties (see Section 3.2). By using agnostic ele-
ments we simplify the generation of CAMP elements
to be used in the deployment, unbinding the descrip-
tion of TOSCA elements to the heterogeneous APIs
used by CAMP implementations. Since each service
or resource in the Brooklyn API defines a specific
set of properties, for the configuration of such com-
ponents, it is required to establish a relationship be-
tween the TOSCA properties defining the topology,
which are not subject to constraints, and CAMP prop-
erties, which are predefined. E.g., a JBossWebServer
in the Brooklyn API allows defining the port http, so
it is necessary to find, in the corresponding TOSCA
element definition, the property which specifies that
value. Note that this property could be defined in dif-
ferent ways in the node template.
CAMP API allows a more detailed configuration
based on the properties of theirs elements. E.g., the
port http of a JBoss server in TOSCA can be defined
by means of a plain property (a string), as a TOSCA
property <httpPort>80</httpPort>. However, the
equivalent CAMP property could add more informa-
tion to define a port range, with, e.g., port.http: 80+,
where the symbol ‘+’ indicates that the http port is a
value equal or greater than 80. See the agnostic repre-
sentation of the properties http and https in Listing 4
(Lines 6-11) as obtained from the property port in the
TOSCA description of the JBoss component in List-
ing 3 (Line 6).
This mechanism not only establishes the equiva-
lence between properties, but also infers and main-
tains the necessary knowledge about them. Only in
this way we can adapt them to the configuration re-
quired by the services described in CAMP APIs. We
therefore need to fix the properties permitted in node
templates, which will be interpreted and added to the
agnostic elements using types.
During the CAMP deployment plan generation,
the process uses the types of these properties to cor-
rectly configure the components described in the cor-
responding CAMP APIs. For example, since Brook-
lyn knows that http is a property of the port type, to
specify this property, we need to add the symbol ‘+’
to determine the port range.
Figure 4 refines Figure 3 to summarize the genera-
tion of a JBoss agnostic component. Steps (1) and (2)
represent the translation of the TOSCA JBoss com-
ponent into the agnostic one. Step (3) checks whether
the properties of the node template are permitted in
the properties list expected by the agnostic element. If
Deployment over Heterogeneous Clouds with TOSCA and CAMP
175
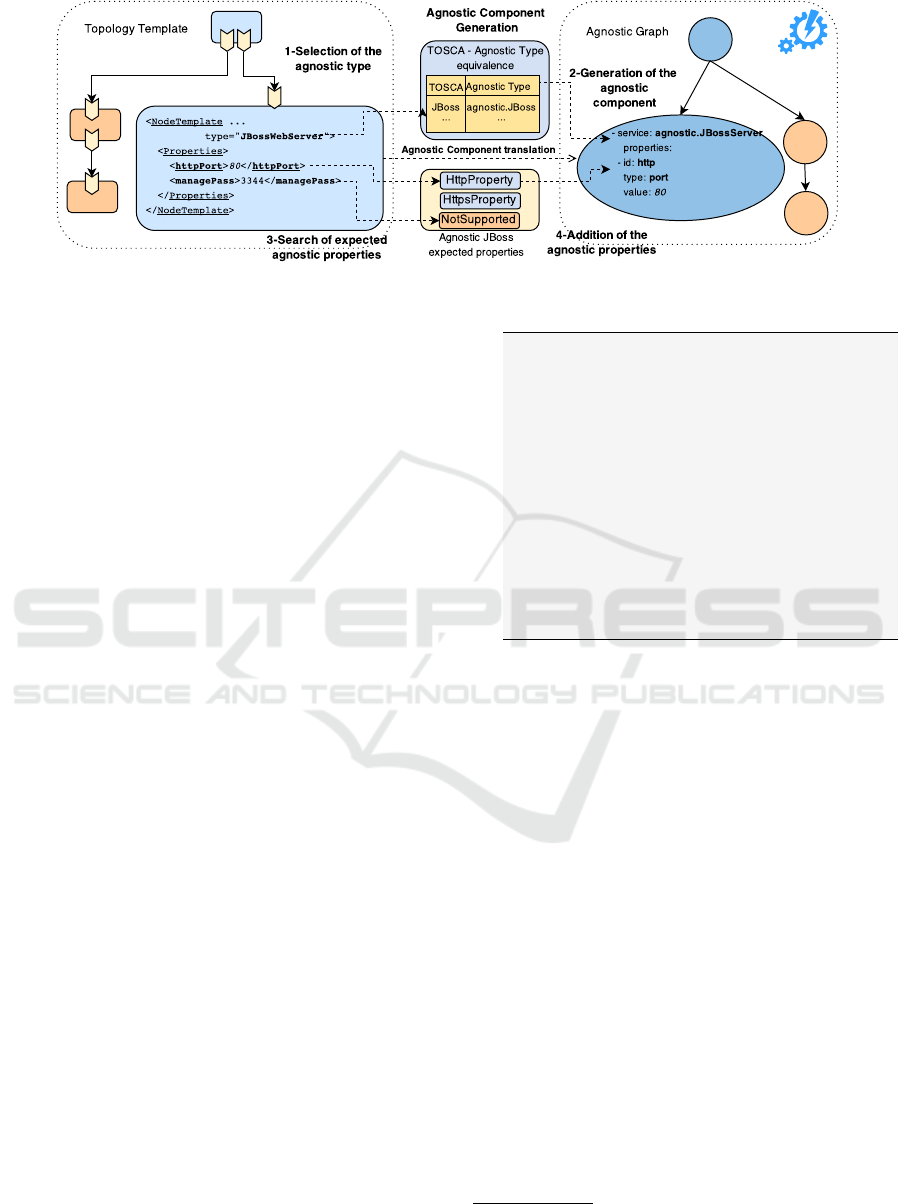
Figure 4: From TOSCA JBoss to JBoss agnostic component.
so, step (4) includes those agnostic properties into the
agnostic component; otherwise, they are discarded.
3.3.3 Plan Generation and Deployment
A CAMP YAML plan is generated from the agnostic
graph, which can then be used for deployment. A plan
is generated by using another transformation, this
time between the agnostic elements and the CAMP-
compliant components specifying the component dis-
tribution to be deployed. We use Brooklyn to deploy
CAMP specifications.
As for the previous transformation, we estab-
lish transformation patterns, which are used to an-
alyze the graph and to generate the orchestration
plan. For instance, for JBoss servers we map ag-
nostic.service.type.server.JBossServer into org.apa-
che.brooklyn.entity.webapp.jboss.JBoss7Server, and
for PostgreSQL we map agnostic.service.type.-
sql.PostgreSQL into org.apache.brooklyn.entity.data-
base.postgresql.PostgreSqlNode.
The management of properties is accomplished by
applying mechanisms similar to the ones described
for the transformation between TOSCA and the ag-
nostic types. In this case, a service defined in a con-
crete CAMP API, like Brooklyn, specifies the prop-
erties supported. For example, although the model-
ing of the agnostic JBoss component supports proper-
ties http and https, in the corresponding CAMP API
definition only the protocol http is supported, but not
https. Therefore, https will not be included in the ar-
tifact in the generated plan.
Once the CAMP-compliant orchestration plan is
generated, the distribution will depend on the con-
crete platform implementing the standard, Brooklyn
in our case.
Listing 5 shows the CAMP-compliant Brooklyn
blueprint for our simple example containing entities
corresponding to a JBoss Server and a MySQL, de-
ployed on Amazon (Oregon’s Cluster) and SoftLayer
(Seattle’s Cluster), respectively.
1 services:
2 - serviceType: org.apache.brooklyn.entity.webapp.jboss.
JBoss7Server
3 name: JBoss Main Web Server
4 location: aws-ec2:us-west-2
5 id: JBossMainWebServer
6 brooklyn.config:
7 port.http: 80+
8 port.https:3344+
9 ...
10 - serviceType: org.apache.brooklyn.entity.database.
mysql.MySqlNode
11 id: db
12 name: DB HelloWorld Visitors
13 location: softlayer-seattle
14 ...
Listing 5: CAMP-compliant Brooklyn blueprint.
3.4 Implementation
Our tool TOMAT (TOSCA sMArt Translator) im-
plements the transformation process presented in the
previous sections, providing support for the cross-
deployment of applications over heterogeneous cross-
clouds. TOMAT allows the transformation of TOSCA
topologies into (Brooklyn) CAMP specifications. As
pointed out in Section 3.2, for the deployment to
be carried out, TOMAT requires the given TOSCA
topology to include the providers’ location. The
tool is available at https://github.com/kiuby88/tomat.
Some external libraries are used to process the
transformation from TOSCA to (Brooklyn) CAMP.
Specifically, to interpret the extended TOSCA topol-
ogy description, we use a module from the Open-
TOSCA container which models the TOSCA topol-
ogy in Java by means of a customised JAXB. For the
generation and visualisation of the agnostic graph, we
use libraries JGraphT
5
and JGraph,
6
respectively.
5
JGraphT: http://jgrapht.org/.
6
JGraph: http://www.jgraph.com/.
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
176

4 CONCLUDING REMARKS
We have presented a flexible methodology to deploy
cross-cloud applications over heterogeneous clouds
through orchestration of services from multiple and
diverse providers. Our approach is based on trans-
formation processes between two major OASIS stan-
dards on cloud interoperability, namely TOSCA and
CAMP, taking advantage of the benefits of each of
them. TOSCA is used to specify the application
topology, and CAMP to deploy the application mod-
ules over clouds.
We have proposed, implemented and validated a
translation process from TOSCA-compliant topolo-
gies to CAMP-compliant plans, with an intermedi-
ate platform-agnostic model that ensures the inde-
pendency between technologies while facilitates the
adaptation to new ones, being only required the defi-
nition of translation rules from the agnostic model to
the new technology. We consider this standard-based
flexibility provides a value-added to previous initia-
tives to mitigate some vendor lock-in issues.
We would like to insist on two ideas. The unifi-
cation of the interfaces is implicit in the CAMP def-
inition, as well as the portability and interoperabil-
ity among services of heterogeneous cloud providers.
Thanks to this, despite the differences in the APIs
of the final cloud providers, end-users see a unified
API which allows them the development of portable
and platform-agnostic applications, whose deploy-
ment can be distributed over multiple and heteroge-
neous clouds. Note also that mechanisms for scal-
ability and elasticity supported by cloud providers
is still available. For example, the above mapping
maps Cluster to its corresponding CAMP-compliant
(Brooklyn) element.
Much work remains ahead. Our tool only supports
the translation and deployment of Java applications
(JBoss, Jetty, Tomcat, ...) and MySQL databases. We
are currently working on including other technolo-
gies (like PHP and Node) and on increasing the sup-
ported database connections. TOSCA has been re-
cently working on the use of YAML-based topology
descriptions (OASIS, 2014). We plan to extend our
solution to also support the translation process be-
tween TOSCA YAML and CAMP YAML. Indeed, it
would be interesting to consider the inclusion of this
transformation into a system like Brooklyn, so that it
can take TOSCA YAML specifications and directly
do the deployment. We are currently involved in a
project working on the integration of Alien4Cloud
and Brooklyn with such goal. Our current implemen-
tation has Brooklyn CAMP as the target technology
for the transformation. In the future, we will explore
the potential of our intermediate agnostic graph to add
support for other CAMP/TOSCA specifications, such
as Ubuntu Juju
7
and Alien4Cloud.
ACKNOWLEDGEMENTS
This work has been partially supported by EU project
FP7-610531 SeaClouds; Spanish MINECO/FEDER
projects TIN2014-52034-R and TIN2015-67083-R;
Andalusian Government project P11-TIC-7659; and
Universidad de M
´
alaga, Campus de Excelencia Inter-
nacional Andaluc
´
ıa Tech.
REFERENCES
Armbrust, M. et al. (2010). A view of cloud computing.
Comm. of ACM, 53(4):50–58.
Binz, T. et al. (2013). OpenTOSCA–a runtime for TOSCA-
based cloud applications. In Service-Oriented Com-
puting, pp. 692–695. Springer.
Brogi, A. et al. (2014). SeaClouds: a European project
on seamless management of multi-cloud applications.
ACM SIGSOFT SEN, 39(1):1–4.
Carrasco et al. (2015). Towards a flexible deployment
of multi-cloud applications based on TOSCA and
CAMP. In ESOCC Workshops, vol. 508 of CCIS, pp.
278–286. Springer.
Kopp, O. et al. (2012). BPMN4TOSCA: A domain-specific
language to model management plans for composite
applications. In Business Process Model and Nota-
tion, pp. 38–52. Springer.
Kopp, O. et al. (2013). Winery–a modeling tool
for TOSCA-based cloud applications. In Service-
Oriented Computing, pp. 700–704. Springer.
Mell, P. and Grance, T. (2011). The NIST definition of
cloud computing. Technical report. Available at
http://dx.doi.org/10.6028/NIST.SP.800-145.
OASIS (2012a). CAMP 1.1. Available at http://docs.oasis-
open.org/camp.
OASIS (2012b). TOSCA 1.0. Available at http://docs.oasis-
open.org/tosca.
OASIS (2013). Interoperability Demo of OASIS
TOSCA. https://www.oasis-open.org/events/cloud/
2013/toscademo.
OASIS (2014). TOSCA YAML. Available at http://
docs.oasis-open.org/tosca.
Paraiso, F. et al. (2012). A federated multi-cloud PaaS in-
frastructure. In IEEE CLOUD, pp. 392–399. IEEE.
Petcu, D. (2011). Portability and interoperability between
clouds: challenges and case study. In Towards a
Service-Based Internet, pp. 62–74. Springer.
7
Ubuntu Juju: https://github.com/juju/juju-tosca.
Deployment over Heterogeneous Clouds with TOSCA and CAMP
177
