
A Guidance System for Wide-area Complex Disaster Evacuation
based on Ant Colony Optimization
Hirotaka Goto
1
, Asuka Ohta
1
, Tomofumi Matsuzawa
1
, Munehiro Takimoto
1
,
Yasushi Kambayashi
2
and Masayuki Takeda
1
1
Department of Information Sciences, Tokyo University of Science, Chiba, Japan
2
Department of Computer & Information Engineering, Nippon Institute of Technology, Saitama, Japan
Keywords:
Ant Colony Optimization, Route Guidance System, Swarm Intelligence, Disaster Simulation, Seismic
Disaster.
Abstract:
This paper reports the results of applying our approach discovering safe evacuation routes to practical situa-
tions. Our approach is based on the ant colony optimization (ACO) and it is practical in the light of a real case
with a tsunami. ACO have been often employed for finding evacuation routes in traditional approaches, which
only take advantage of ants’ behavior more frequently following traces of other ants through pheromone com-
munications. We assume that there are a lot of danger zones in the damaged area. For example Rikuzentakata
is a city that extensively damaged in the 2011 Great East Japan Earthquake. In such a case, the traditional
approaches may present some unsafe routes through the danger zones. We have proposed an ACO based
approach that calculates evacuation routes avoiding danger zones. In our approach, evacuees can deposit de-
odorant pheromone around danger zones, which makes normal pheromone ineffective, so that our approach
gives routes not passing through the danger zones. We have implemented our approach as a simulator, con-
ducting experiments in the same situation as the Rikuzentakata case. Through the results of the experiments,
we show that our approach decreases the number of people suffering from collapsed and burning buildings.
1 INTRODUCTION
The Great East Japan Earthquake in 2011 was
recorded as an earthquake with magnitude 9.0. The
earthquake destroyed all the anti-tsunami structures
such as breakwaters and tide embankments, so that
the tsunami following the earthquake caused enor-
mous damage to the coastal areas. The damage that
people suffer from such a wide-area disaster can be
classified into three patterns: the direct disaster casu-
alties, the damage caused by collapsing of structures
and fire during evacuation, and the damage caused
by the disastrous tsunami. In general, these dam-
ages do not occur simultaneously. In most cases, peo-
ple saved from the first damage have to escape from
the third damage while avoiding the second damage.
Therefore, ideally, evacuation to safe areas should be
completed before the third attack where the tsunami
strikes. However, several zones damaged by an earth-
quake restrict the number of evacuation routes, so that
it becomes difficult for people to evacuate. Thus, it is
extremely important to dynamically find safe evacua-
tion routes depending on the situation where a wide-
area disaster occurs.
In this paper, we propose an algorithm of discov-
ering safe evacuations based on the ant colony opti-
mization (ACO) algorithm (Dorigo et al., 1996) ex-
tended for avoiding danger zones, e.g., areas with fire
and other damages. Traditional approaches based on
ACO presents the shortest routes to safe areas depend-
ing on strength of pheromone, which may include the
danger zones. In our approach, we introduce a new
repulsive pheromone called deodorant pheromone to
ACO (Ohta et al., 2016).
In order to quantitatively evaluate the algorithm
in realistic situations, we present complex disaster
scenarios such as tsunamis. In the numerical exper-
iments, we show that our evacuation system can find
effective routes that decrease the number of people
suffering from collapsed or burning structures. Also,
we discuss the limitations of our algorithm.
The structure of the balance of this paper is as fol-
lows. In the second section, we describe the related
work. In the third section, we provide an overview
262
Goto, H., Ohta, A., Matsuzawa, T., Takimoto, M., Kambayashi, Y. and Takeda, M.
A Guidance System for Wide-area Complex Disaster Evacuation based on Ant Colony Optimization.
DOI: 10.5220/0005819502620268
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 1, pages 262-268
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of the ACO and discuss issues that we need to con-
sider during an evacuation. In the fourth section, we
describe the simulation model. In the fifth section,
we discuss the results of the experiments. In the sixth
section, we discuss the other scenario. In the seventh
section, we describe a future work and we conclude
our discussion.
2 RELATED WORKS
Disaster is known to make several infrastructures un-
available, in which communication infrastructures are
also included. Once access points for Wi-Fi become
unavailable, we cannot take advantage of mobile de-
vices to collect useful information for our evacuation.
However, even in the cases, we may be able to con-
struct a mobile ad-hoc network through connecting
mobile devices one another, which may be effective
for sharing the information. In previous works that
deal with evacuation assistance, there are a lot of ap-
proaches assuming the ad-hoc network. Especially,
ACO based approaches are effective to detect evacu-
ation routes on the ad-hoc network. Avil´es et al. pro-
posed an approach for sharing information of evacu-
ation gates on the ad hoc network. In their approach,
ants and pheromone of ACO are implemented as soft-
ware mobile agents, where the agents corresponding
to ants dynamically guide evacuees to the evacuation
gates in a floor (Avil´es et al., 2014).
Asakura et al. proposed an approach that calcu-
lates evacuation routes based on ACO on a simula-
tor, and showed the effectiveness of applying their
approach to wide-scale disaster areas (Asakura et al.,
2013a)(Asakura et al., 2013b).
On the other hand, Mas et al. applied their
simulation-based approach, which did not use ACO,
to more practical case of the Great East Japan Earth-
quake, and showed that the shortest evacuation routes
were detected (Mas et al., 2012).
These previous works highlight just one of two is-
sues important for evacuation support systems, which
are consideration of the secondary disaster and reality
of assumed scenario. Our reports in this paper provide
not only remediation for the evacuation in the disaster
but also experimental results based on realistic sce-
narios to show the effectiveness of our approach.
3 EXTENDED ANT COLONY
OPTIMIZATION
This section explains the details of deodorant
pheromone mentioned in Section 1 by extending the
basic algorithm corresponding to traditional ACO,
where the deodorant pheromone suppresses the effect
of traditional pheromone in our extended ACO. Also,
we describe how the deodorant pheromone is used to
avoid danger zones.
3.1 Basic Algorithm
During foraging, real ants secrete a volatile chemi-
cal substance called pheromone that encourages other
ants to behave cooperatively. Once an ant discov-
ers food, it brings the food to the nest. In this pro-
cess, it put pheromone on the ground to provide sign-
posts for following ants. As well, the ants carrying
the food along the pheromone also put pheromone
on the same ground, strengthening the effectiveness
of attraction. The strengthening of pheromone re-
sults in some routes between the nest and the food.
Conversely, pheromone on the ground unused by the
ants gradually decreases the density of pheromone by
evaporation. Thus, the accumulation of pheromone
along restricted routs causes positive feedback, so
that ants can find the shortest route among multiple
routes with different lengths. If pheromone informa-
tion were not available, ants would forage by moving
at random.
Figure 1: Route generation by the ACO. S and G denote the
starting point and destination point, respectively.
Figure 1 illustrates a route established by foraging
ants. Consider that three ants explore on three routes
with different distances between a starting point S
and a destination point G. First, the ants simultane-
ously explore from S to G. Once the ants reach a
branch, they select their own directions randomly. If
all the ants select the middle route, they will arrive
at the destination at the same time. After that, in the
process where the ants return to S, they deposit their
pheromone. If they return to G again, they can use the
previously deposited pheromone as guidance. Notice
here that the ants preferentially select the middle
route, because the density of the pheromone on the
other routes is decreased by evaporation. In this way,
the ACO finds the shortest route. Summarizing the
A Guidance System for Wide-area Complex Disaster Evacuation based on Ant Colony Optimization
263

steps of ACO, they are as follows:
1. Ants seek a route between the starting point
(Start) and destination point (Goal).
2. Ants locally explore a branch along the route.
3. Ants secrete pheromone on the ground while they
travel their routes.
4. Pheromone evaporates at a constant rate.
5. The above steps are repeated through the specified
number of iterations.
3.2 Extended Pheromone Behaviors
Assume that we simply search evacuation routes
based on the algorithm of Section 3.1 in the event of a
disaster. In this case, even if the suggested evacuation
route is the approximately shortest route, it may in-
clude or touch danger zones. In order to avoid danger
zones, we have introduced deodorant pheromone that
decreases the pheromone laid around danger zones.
Deodorant pheromone erases the traces of previously
deposited pheromone and attenuates the pheromone
in surrounding regions, and imparts new information
about danger zones.
In our ACO, normal pheromone contributes to
constructing shorter evacuation routes, and deodor-
ant pheromone contributes to adjusting the evacua-
tion routes to avoid danger zones. Thus, the two kinds
of pheromone cooperativelyconstruct safe evacuation
routes for evacuees.
3.2.1 Normal Pheromone
The normal pheromone is applied along the passable
evacuation route. Once an evacuee arrives at a safe
area, the normal pheromone is updated by Eq. (1),
where τ
ij
(t) is the pheromone value at coordinates
(i, j) at time t, and G
t
denotes the evacuees who ar-
rived at the safe area in time t.
τ
ij
(t + 1) = (1− ρ)τ
ij
(t) +
∑
k∈G
t
∆τ
k
ij
(1)
τ
ij
(t) is decreased by an evaporation rate ρ, and is
increased by ∆τ
k
ij
for evacuee k that has reached the
safe area, step by step.
∆τ
k
ij
is determined by α and T
k
, where α is the
amount of pheromone applied at coordinates (i, j),
and T
k
denotes the traffic when the evacuee k has
reached the safe area as follows:
∆τ
k
ij
(t) =
α if (i, j) ∈ T
k
0 otherwise
(2)
τ
ij
(t) is limited by upper and lower bounds, τ
max
and τ
min
well as traditional ACOs based on MAX-
MIN ant system (Sttzle and Hoos, 2000). The up-
per bound prevents solutions from being trapped in
local minimums, which is one of characteristics of lo-
cal neighborhood searching. The lower bound per-
mits searching of any solutions.
0 < τ
min
< τ
ij
(t) ≤ τ
max
(3)
In the case where the normal pheromone is only used,
our ACO works in the same way as traditional ACOs.
We call it normal ACO (nACO).
3.2.2 Deodorant Pheromone
The deodorant pheromone, which exerts a repul-
sive force on evacuees, causes normal pheromone to
be updated whenever an evacuee encounters a dan-
ger zone. At this time, the density of the normal
pheromone is decreased.
Also, the deodorant pheromone decreases the
density of the pheromone not only at the center of
the danger zone but also at the surrounding area.
The update of normal pheromone in a certain range
including a danger zone is performed based on the
following equation:
τ
ij
(t + 1) = (1− σ
n
k
ij
(t)+1
)τ
ij
(t) (4)
Where σ is the rate of the deodorant, and n
k
ij
(t) is the
distance from the coordinate (i, j) marked as a dan-
ger zone by evacuee k. Under Eq. (4), the deodorant
pheromone spreads only within a certain range.
In the simulation, we limit the spread of the de-
odorant pheromone as n
k
ij
(t) ≤ N.
We call our ACO that includes both normal and
deodorant pheromones the extended ACO (eACO).
4 SIMULATION MODEL
4.1 Disaster Scenario
This section shows the scenario that we assume in
our simulation. The scenario is based on the situ-
ation of the city of Rikuzentakata, which was ex-
tensively damaged in the 2011 Great East Japan
Earthquake. The peak inundation and evacuation
locations in Rikuzentakata have been published in
the Rikuzentakata Earthquake Verification Report
(Rikuzentakata, 2014). In addition, the onset times of
the earthquake and tsunami as well as the peak time of
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
264
the inundation have been summarized in chronolog-
ical order (Ushiyama and Yokomaku, 2012). From
these references, we have determined the time al-
lowed for evacuation is approximately 45 minutes af-
ter the earthquake occurs. Then the flooding gets to
be maximized. Table 1 shows the time schedule of
each event.
Table 1: Timing of each event.
Time Event
14:46 Earthquake occurs
15:24 Inundation start
15:29 Inundation peak
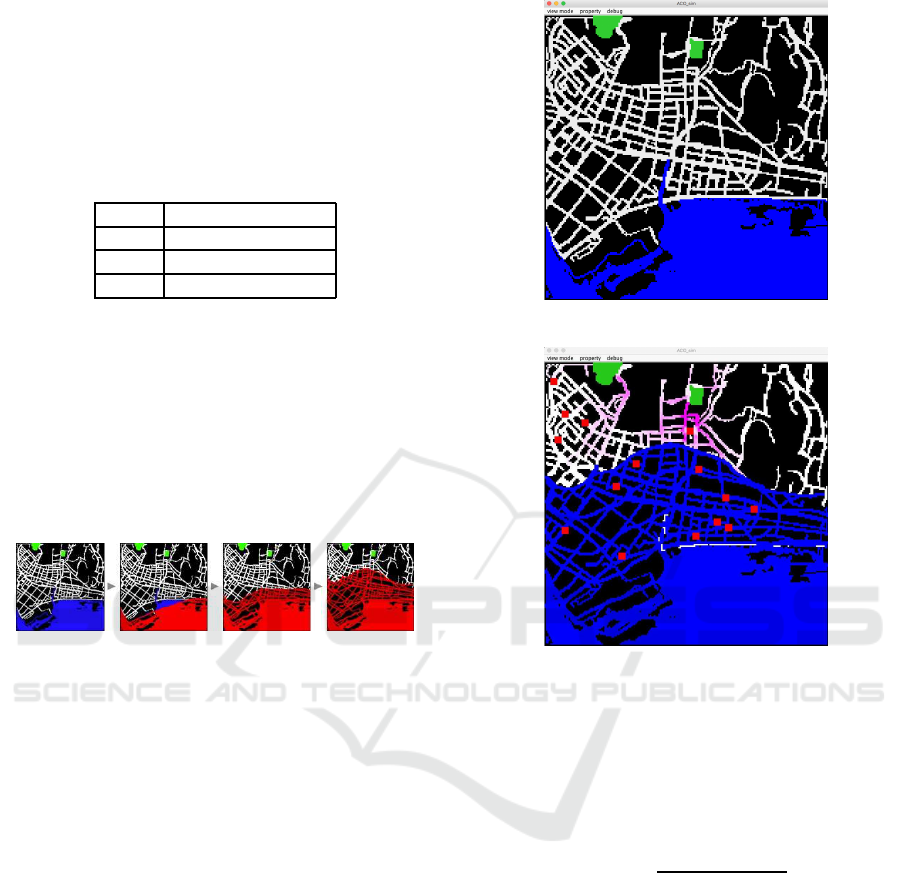
Figure 2 chronologically shows the situations of
tsunami. By using the information and assumptions,
we have succeeded in reproducing the flood situa-
tions of tsunami induced by the earthquake in the city
of Rikuzentakata. However, refugees must have also
encountered fire and collapse of rubble as secondary
disasters at several locations during their evacuation,
though the details of them were not recorded. We sim-
ply assume those secondary disasters occur randomly.
Figure 2: Chronological order of the tsunami damage situ-
ation.
As mentioned in Section 4.1, we assume that the
evacuation time is restricted to the period from the
earthquake outbreak to arrival of the tsunami. The
start and end of the simulations are depicted in Fig-
ures 3 and 4, respectively. Evacuation activities are
simulated by a multi-agent simulator in which the
agents correspond to people. In the simulation, the
city of Rikuzentakata is mapped onto a 200 200 grid
(Figure 3). Each grid cell denotes a passable area,
an impassable area, a safe area or a danger zone.
Once the simulation starts and the earthquake breaks
out, the simulator generates evacuees randomly in the
passable areas on the map. After that, evacuees deter-
mine their evacuation routes based on local informa-
tion along ACO based guidance.
4.2 Simulator Overview
Each evacuee obtains pheromone information from
the eight cells surrounding the cell he or she resides,
determining his or her next move along the guidance
of the pheromone information.
In each simulation step, the evacuees move from
their current cells to one of the eight surrounding the
Figure 3: Start of the simulation.
Figure 4: End of the simulation. Red squares mark danger
zones.
cells. At this time, the direction where to move is
stochastically determined by the pheromone informa-
tion described in Section 3.2. The probability p
xy
(t)
of an evacuee’s moving to (x, y) at time t is given by
the following equation:
p
xy
(t) =
τ
xy
(t)
∑
(i, j)∈X
k
(t)
τ
ij
(t)
(5)
Where X
k
(t) indicates the movable locations sur-
rounding the evacuee k. Equation (5) probabilistically
promotes the movement toward neighbor cells with
relatively high pheromone values.
Sometimes, the guidance may give undesirable
suggestion such as going towards a danger zone. In
such cases, the evacuee stop moving at that time, and
then, deposits the deodorant pheromone to mark it for
other evacuees. Once the evacuee reaches a safe area,
pheromone information put along his trace is reset.
A Guidance System for Wide-area Complex Disaster Evacuation based on Ant Colony Optimization
265
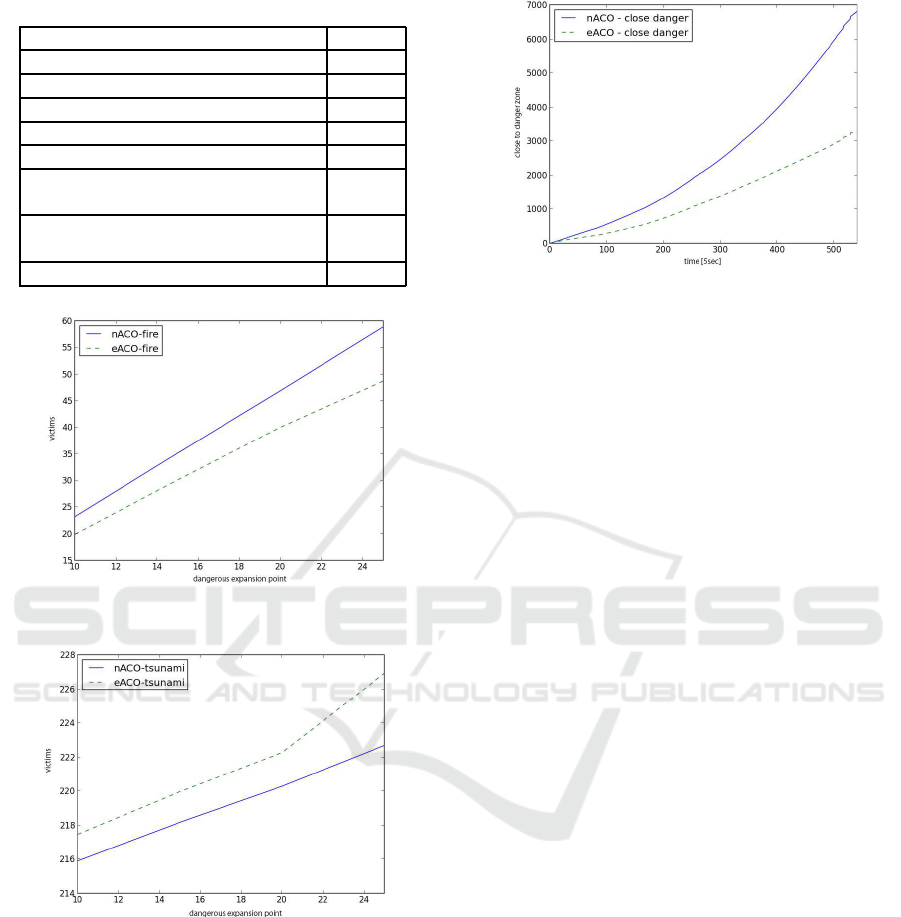
Table 2: Simulation parameters.
Parameter Value
Number of evacuees 1000
Evaporation rate ρ 0.0005
Amount of pheromone adding α 1.0
Upper bound of pheromone τ
max
30.0
Lower bound of pheromone τ
min
1.0
Constant of deodorant pheromone
τ
′
-50.0
Influence range of deodorant
pheromone N
2
Deodorant rate σ 0.5
Figure 5: The number of evacuees caught in danger zones
versus the number of victims.
Figure 6: The number of evacuees involved in the tsunami
versus the number of victims.
5 EXPERIMENTAL RESULTS
This section compares the simulation results of the
cases using nACO and eACO.
The simulation used the settings listed in Table 2,
and randomly located 10 to 25 danger zones (incre-
mented by five). Each experiment was run 500 times,
and the mean values are plotted. In the following fig-
ures, the solid and dashed lines indicate the results of
the cases using nACO and eACO, respectively.
Figure 7: The number of approaches of evacuees to danger
zones, as a function of simulation time.
5.1 Results
Figure 5 shows the relationship between the number
of danger zones and the number of victims encounter-
ing danger zones. We have observed that more evac-
uees are entrapped in the case for nACO than eACO.
Figure 6 shows the relationship between the num-
ber of danger zones and the number of victims en-
countering tsunami. In this case, the number of en-
dangered evacuees is higher in the case for eACO than
nACO.
Figure 7 plots the cumulativenumber of times that
evacuees approach the danger zones. Overall, us-
ing the eACO decreases the number of evacuees ap-
proaching the danger zones.
5.2 Discussion
Although the number of at-risk evacuees increases as
the number of danger zones increases in both algo-
rithms, we can observe that the number of those in the
case for eACO smaller than nACO. This reflects the
effect of the deodorant pheromone that repels agents
from danger zones and their vicinities. However, this
benefit was partially offset by the increased number
of evacuees affected by the tsunami (Figure 6). The
deodorant pheromone in eACO enforces a detour-like
evacuation activity on evacuees and have them expo-
sure to the tsunami risk.
We therefore investigate how much duration time
the evacuees need to escape the tsunami through safe
routes while avoiding dangerous area by using eACO
in the next experiment.
6 ADDITIONAL SCENARIO
We have already experienced another devastating
tsunami in 2004 that followed an earthquake off the
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
266
coast of Sumatra, which was recorded as magnitude
9.1. In this disaster, there was a relatively long lapse
of time between the outbreak of the earthquake and
the arrival of the tsunami. Given the pattern of the
earthquake, we can vary the timing of the tsunami at-
tack. In this experiment, we have changed the lapses
of time between the outbreak of the earthquake and
arrivals of the tsunami whereas the other parameters
is left unchanged.
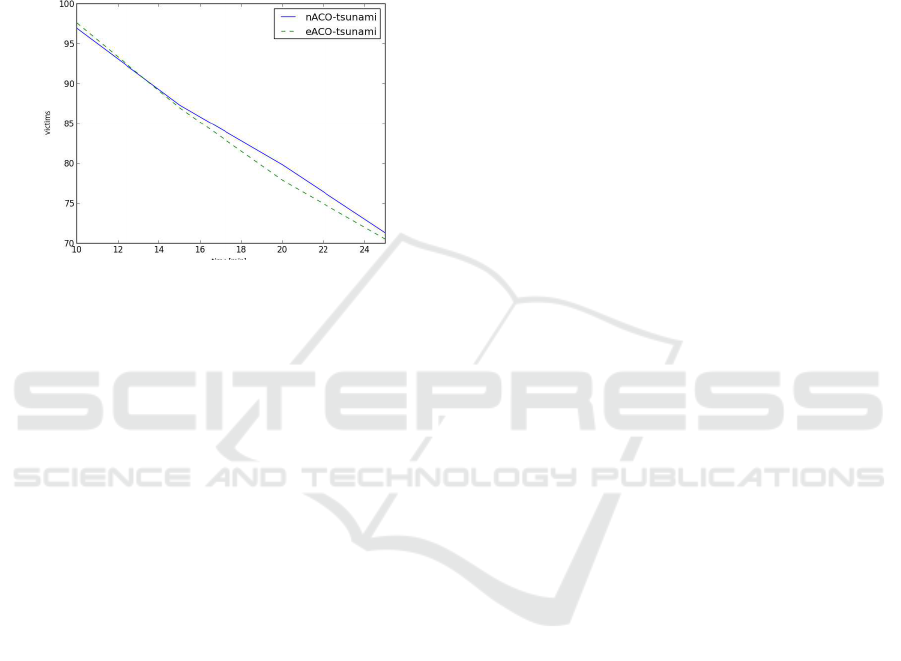
Figure 8: The number of evacuees involved in the tsunami,
versus delay time of the tsunami.
6.1 Results
Figure 8 plots the number of evacuees involved in the
tsunami, versus the delay time of the tsunami. If there
is a time lapse of approximately 20 minutes, the num-
ber of tsunami victims became smaller in the case for
eACO than nACO.
6.2 Discussion
Our eACO algorithm is beneficial when there is suf-
ficient duration time for escape between the outbreak
of an earthquake and the following tsunami. How-
ever, neither ACO is effective in a case that immedi-
ate evacuation is needed, because considerable time
is required to construct safe evacuation routes. On
the other hand, the eACO is applicable to many real
scenarios in which evacuees can flee dangerous situ-
ations, such as building collapses and fire, before a
tsunami strikes.
7 CONCLUSIONS
This paper proposes an evacuation support system and
analyzes its effectiveness by simulation experiments
of a case of the wide-scale disaster area in the city of
Rikuzentakata. The city was extensively damaged by
the 2011 tsunami.
The proposed evacuation system that implements
our approach extends the ant colony optimization
method (ACO), which allows agents to share their
routing information after reaching safe areas. In the
model, evacuees take the routes traveled in previous
evacuation activities while they avoid dangerous area
by using the information given by preceding evac-
uees.
Comparing with the normal ACO, our ACO model
decreases the numbers of evacuees caught in danger
zones. The result indicates that our approach assists
to construct safe evacuation routes that bypass dan-
gerous zones. However, it increases the number of
evacuees who were caught in the tsunami. We can ob-
serve that our method is beneficial when there is suf-
ficient time lapse between the outbreak of the earth-
quake and the arrival of the tsunami. In that case, the
additional deodorantpheromonerepels evacueesfrom
danger zones, while guiding them away from the in-
undation of the tsunami.
As a future work, we plan to evaluate and gener-
alize the various experimental parameters. We also
need to investigate how to disperse the escape routes
for mitigating the traffic congestion of the evacuees. It
is necessary because in actual evacuation scenes peo-
ple may concentrate on a particular path toward safe
areas and hinder the evacuationactivities. The present
evacuation guidance system focuses on the direction
of movement. To simulate precise evacuation behav-
ior, the agents must undertake more human-like intel-
ligent actions.
ACKNOWLEDGEMENTS
This work is supported in part by Japan Society for
Promotion of Science (JSPS), with the basic research
program (C) (No. 25330089 and 26350456), Grant-
in-Aid for Scientific Research.
REFERENCES
Asakura, K., Fukaya, K., and Watanabe, T. (2013a). Con-
struction of navigational maps for evacuees in disaster
areas based on ant colony systems. International Jour-
nal of Knowledge and Web Intelligence, 4:300–313.
Asakura, K., Fukaya, K., and Watanabe, T. (2013b). A map
construction system for disaster areas based on ant
colony systems. Procedia Computer Science, 22:494–
501. 17th International Conference in Knowledge
Based and Intelligent Information and Engineering
Systems.
Avil´es, A., Takimoto, M., and Kambayashi, Y. (2014).
Distributed evacuation route planning using mobile
A Guidance System for Wide-area Complex Disaster Evacuation based on Ant Colony Optimization
267

agents. In Transactions on Computational Collective
Intelligence XVII, volume 8790, pages 128–144.
Dorigo, M., Maniezzo, V., and Colorni, A. (1996). Ant sys-
tem: optimization by a colony of cooperating agents.
IEEE Transactions on Systems, 26(1):29–41.
Mas, E., Suppasri, A., Imamura, F., and Koshimura, S.
(2012). Agent-based simulation of the 2011 great east
japan earthquake/tsunami evacuation: An integrated
model of tsunami inundation and evacuation. Journal
of Natural Disaster Science, 34(1):41–57.
Ohta, A., Goto, H., Matsuzawa, T., Takimoto, M., Kam-
bayashi, Y., and Takeda, M. (2016). An improved
evacuation guidance system based on ant colony op-
timization. In Intelligent and Evolutionary Systems,
volume 5 of Proceedings in Adaptation, Learning and
Optimization, pages 15–27.
Rikuzentakata (2014). The city of rikuzentakata the great
east japan earthquake verification report: Rikuzen-
takatashi higashi nihon daishinsai kenshou houkoku
sho (in japanese).
Sttzle, T. and Hoos, H. H. (2000). Maxmin ant system. Fu-
ture Generation Computer Systems, 16(8):889–914.
Ushiyama, M. and Yokomaku, S. (2012). Estimation of sit-
uation in rikuzentakata city just before tsunami atack
based on time stamp data. Japan Society for natural
disaster science, 31(1):47–58.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
268
