
Camar
´
on: An Open-source Visualization Tool for the Quality Inspection
of Polygonal and Polyhedral Meshes
Aldo Canepa
1
, Gonzalo Infante
1
, Nancy Hitschfeld
1
and Claudio Lobos
2
1
Departamento de Ciencias de la Computaci
´
on, FCFM, Universidad de Chile, Santiago, Chile
2
Departamento de Inform
´
atica, Universidad T
´
ecnica Federico Santa Mar
´
ıa, Santiago, Chile
Keywords:
Polygonal Meshes, Polyhedral Meshes, Quality Criteria, Data Visualization, GLSL.
Abstract:
The numerical simulation of phenomena requires a good quality discretization (mesh) of the domain. De-
pending on the problem to be simulated, the mesh has to fulfil different quality criteria. Because of geometry
restrictions or point density requirements, several mesh elements might not satisfy the required quality criteria
and sometimes it is also not required that all elements fulfil them. Then, it would be helpful to know where
unwanted elements are located in order to see if they need to be repaired or not. That is why a visualization
tool that allows the user to inspect a mesh before a simulation is performed can be useful to prevent simulation
problems. Moreover, if data from simulations is available, the visualization of geometrical properties together
with simulation data could be also helpful to understand not expected results. These challenges have motivated
us to develop Camar
´
on, a visualization tool for large surface and volume meshes described in this paper. The
surface meshes can be composed any polygonal cell and the 3D meshes can include any convex polyhedral
cell. This tool was implemented in C++ and the OpenGL Shading Language (GLSL). We discuss the design
and implementation issues that make our software portable, extensible and different from other visualization
tools. We also compare the performance between Camar
´
on and GeomView, TetView and MeshLab.
1 INTRODUCTION
The numerical simulation of complex objects requires
a good domain discretization (mesh). In 2D, meshes
are usually composed of triangles and/or quadrilater-
als and, in less frequent cases, of convex polygons.
In 3D, meshes are commonly composed of tetrahedra
and/or hexahedra. In case of mixed element meshes,
pyramids, prisms and other convex polyhedra might
also be included. A good quality mesh depends on
the problem to be solved and the chosen numerical
method. Different quality criteria have been defined
using geometric properties of the mesh elements such
as minimum (dihedral) angle, maximum (dihedral)
angle, and aspect ratio, among others. Quality criteria
are used to control the refinement and improvement
process of a mesh. Because of geometry restrictions
or point density requirements, frequently not all mesh
elements fulfil the quality criteria required by the user.
It would be helpful to know where bad elements are
located in order to try to improve them. That is why
a visualization tool that allows the user to inspect a
mesh before a simulation is performed can be useful
to prevent simulation problems.
Currently, there are several open-source visualiza-
tion tools, some of them only dedicated to visualize
the spatial discretization and others to visualize sci-
entific data together with the mesh. Both types of
visualization tools render meshes composed of only
one element type or a limited type of elements, and
are usually associated to a mesh generator. For ex-
ample, TetView (Si, 2013) is related to the tetrahe-
dral mesh generator TetGen (Si, 2015) and it is able
to visualize tetrahedral meshes. GeomView (Amenta
et al., 1995) was specially designed for the visualiza-
tion of surface meshes composed of any polygonal
cell. A tool that integrates mesh generation and vi-
sualization is MeshLab (Cignoni et al., 2008). It is
oriented to generate, repair and process 3D triangu-
lar meshes. MayaVi (Ramachandran and Varoquaux,
2011), VisIt (Childs et al., 2011; VisIt, 2015) and Par-
aView (Henderson and Ahrens, 2004) are popular vi-
sualization tools oriented to visualize large datasets
by providing techniques to analyze them. These last
tools are implemented on VTK (Vtk, 2015; Hanwell
et al., 2015), a software system that supports a vari-
ety of visualization algorithms including scalar, vec-
tor, tensor, texture, and volumetric methods. None of
130
Canepa, A., Infante, G., Hitschfeld, N. and Lobos, C.
Camarón: An Open-source Visualization Tool for the Quality Inspection of Polygonal and Polyhedral Meshes.
DOI: 10.5220/0005830501280135
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 1: GRAPP, pages 130-137
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

them allow the user interactive evaluation of the geo-
metrical mesh quality and the visualization of meshes
composed of any convex polyhedral cells. Note that
the use of different element types reduces the amount
of edges, faces and elements in the final mesh that is
why the generation of polyhedral meshes is starting to
be considered (Garimella et al., 2013; Contreras and
Hitschfeld-Kahler, 2014).
In this paper, we present the design and imple-
mentation of an open-source portable and extensible
visualization tool for large polygonal and polyhedral
meshes. The current implementation allows the user
to: (1) open and save a mesh from/to formats such
as OFF, PLY, M3d, Ansys, TRI and Visf. Visf is
an own binary format, designed to handle polyhedral
meshes. It is an extension of the OFF format that
can also store neighboring information, (2) apply to
the mesh several rendering strategies such as flat and
Phong shading, property and data visualization ren-
dering, (3) evaluate the mesh using known quality cri-
teria such as minimum and maximum (dihedral) an-
gle, aspect ratio and volume, (4) select mesh elements
that fulfil specific quality criteria or intersect a prim-
itive such as a sphere, a set of polygons defining a
convex polyhedron, or a set of planes, and (5) gener-
ate statistics to identify if the mesh has the expected
quality or not. The tool was implemented in C++ and
GLSL (Wolf, 2011). We did not implemented this
tool on VTK because we wanted to use as efficient
as possible the computational resources and permit
the visualization of non-manifold meshes. We also
wanted to design an extensible software in selection,
rendering and evaluation strategies. The results of a
performance and memory usage comparison among
Camar
´
on, GeomView, TetView and MeshLab shows
that our tool is faster but uses more memory than the
other tools.
This paper is organized as follows: in Section 2
we introduce the motivation and challenges of our
work. In section 3 we describe the tool architec-
ture, in particular, the methodology we have followed,
and design and implementation issues. In section 4
we compare Camar
´
on with Meshlab, GeomView and
TetView both in performance and memory usage and
in Section 5 we include the conclusions and future
work.
2 MOTIVATION AND
CHALLENGES
We are interested in developing new algorithms for
the generation of polyhedral meshes for different kind
of applications. Each application usually requires that
the mesh fulfills particular quality criteria, but some-
times it is difficult or impossible to generate only
good quality elements. Through the visual inspection
of a mesh it can be detected where bad quality ele-
ments are located and decide if the mesh still needs
improvements or it can be already used. In order to
support this kind of inspection of a mesh, we have de-
cided to develop a new visualization tool where a user
can:
• Handle any element shape (convex polygons and
polyhedra)
• Apply the most known quality criteria
• Generate statistics about the quality of the ele-
ments
• Detect where unwanted elements are
• Apply different rendering strategies
• Select mesh elements through several selection
strategies
• Visualize large meshes
• Open and save meshes stored in the most known
formats
In addition, it is important for us to develop soft-
ware that is portable and easy to extend in quality
criteria, input/output formats, rendering and selection
strategies.
3 TOOL ARCHITECTURE
This section starts with the description of the method-
ology we have used to develop Camar
´
on, then contin-
ues with main aspects of the design and finishes with
implementation details and the user interface.
3.1 Methodology
In this work, we take advantage of our experience
developing extensible object-oriented software for
building families of meshing tools (Bastarrica and
Hitschfeld-Kahler, 2006; Rossel et al., 2014). Our
design considers (1) types and subtyping to model
the objects whose instances can evolve in time (Hal-
bert and O’Brien, 1987), (2) guidelines to write good
classes (Eli
¨
ens, 1995) and (3) the use of design pat-
terns (Gamma et al., 1995) and good software engi-
neering practices (Lethbridge and Lagani
´
ere, 2005).
These three points helped us to build software easy
to understand, maintain and extend. Together with
Singleton and Factory Method, the following design
patterns are used:
Camarón: An Open-source Visualization Tool for the Quality Inspection of Polygonal and Polyhedral Meshes
131

• Strategy: to easy add and interchange different al-
gorithms to solve a similar problem
• Visitor: to separate algorithms/strategies (class
Visitor) from the objects (class Element) to be ap-
plied. The methods of the classes that extends El-
ement use Double Dispatch in order to apply the
right Visitor method during execution time.
Double Dispatch is a technique that helps one to
choose what function to execute, when there exist sev-
eral with the same name, depending on the objects in-
volved in the call during the execution time.
3.2 Design
In order to build a visualization tool that can render
point clouds, polygonal and polyhedral meshes, we
have modeled the basic element by the class Element,
from which inherits the classes Point, Polygon and
Polyhedron. From Polygon inherits the class Trian-
gle and Quadrilateral, because this allows us to handle
efficiently triangular and quadrilateral meshes. From
Polyhedron inherits Tetrahedron and Hexahedron in
case of tetrahedral or hexahedral meshes are drawn.
To manage several input/output formats, render-
ing algorithms, selection modes and evaluation strate-
gies we used the Strategy pattern. For example,
we have designed the abstract class EvaluationStrat-
egy to apply any quality criterion to the individual
mesh element types. From EvaluationStrategy in-
herits MinimumAngle and MaximumDihedralAngle,
among others.
The selection strategies can be applied to the
whole mesh or to a subset of elements that was al-
ready selected. We created the class SelectionStrategy
from which inherits SelectById and SelectByProp-
erty, among others. SelectById allows a user to select
elements by using their indices and SelectByProperty
to select the elements that fulfil or not the specified
quality criterion. The Visitor pattern is implemented
between the selection strategies and the mesh ele-
ments so that by using the Double Dispatch technique
the right strategy is applied to a particular mesh ele-
ment.
The rendering strategies are also modeled in a
similar way. There exists a base class called Ren-
dererStrategy and several subclasses that implements
specific rendering algorithms. For example, Normal-
Renderer displays the model with normal vectors at
each face vertex and PropertyRenderer draws each el-
ement with different colors according to the values of
the applied quality criterion. For rendering the part
of a model that intersects 3D convex shapes, we de-
sign the class ConvexGeometryIntersectionRenderer
which inherits from RendererStrategy and Selection-
Strategy. The idea was to use the specified 3D convex
geometry for both to compute and render its intersec-
tion with the mesh and to select elements.
In order to extend the software without modifying
the user interface or already implemented classes we
have implemented dynamic registers. Each registry
class is modeled with the Singleton pattern so that
only one instance of each of them is created. Each
extensible module must have an associated registry
class. So, there exist the ModelLoadingFactory class,
the RendererRegistry class and the SelectionStrate-
gyRegistry class, among others. All these registries
inherit from a RegistryTemplate class, which stores
the different class instances associated to a key and a
priority queue that allows the programmer to organize
the order in which the different strategies will appear
in the user interface.
Finally, a Controller class, contains references to
all registry classes and is in charge of coordinating all
the operations according to the user requests.
3.3 Implementation
3.3.1 General Issues
Meshes are expected to be composed of convex poly-
gons and convex polyhedra. If non convex elements
are included, some rendering errors can appear. Since
in this application all geometrical properties remain
constant while the same model is displayed, we send
the computed values once to the GPU and keep them
in the VRAM until a new model is loaded. We man-
age attributes per triangle vertex in order to store dif-
ferent attributes when the same vertex belongs to sev-
eral triangles. So two triangles that share a vertex can
be rendered, for example, with a different flat color.
The polygons of surface meshes or the polygonal
faces of polyhedra are triangulated first before send-
ing their information to the VRAM, because GPUs
only manage triangles. Each renderer class has a con-
figuration widget, which allows the user to choose
colors and other attributes for the selected and unse-
lected elements. Each renderer has an associated Ver-
tex shader, Fragment shader and Geometry shader if
it is required. Several shaders to render the models
were taken from the book (Wolf, 2011).
In order to develop software independent of the
platform, we decided to use the Glew library (the
OpenGL Extension Wrangler library) (Glew, 2012).
This library provides efficient mechanisms to obtain
which OpenGL functionalities are available on target
GPU hardware. QtCreator was used to build the user
interface.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
132
3.3.2 Geometric Model Renderers
The property renderer was designed for the visual-
ization of the elements that fulfill or not a particu-
lar quality criterion. The user chooses the property
(quality criterion) he or she wants to inspect (mini-
mum angle, aspect ratio, etc) and selects which col-
ors will be used. A new attribute array is created to
store the computed property values for the vertices
and/or triangles. The user defines three different col-
ors: null for the elements where the property does not
apply, C
max
for elements with the maximum value of
the property and C
min
for elements with the minimum
value of the property. For elements where the prop-
erty has a value between the minimum and maximum,
the color is obtained by doing linear interpolation.
When rendering an intersected model, the 3D con-
vex geometry intersecting a model can stay in a fixed
position or can move with the model. In case the
3D convex geometry moves together with the model,
the intersection is computed only once and the shader
only takes care of rendering the elements by using
other viewing parameters. In case the 3D convex ge-
ometry stays at a fixed position, the associated shader
computes in real time its intersection with the model.
In order to draw the wireframe of the model, the
algorithm described in (Bærentzen et al., 2006) is
used. This algorithm achieves in a single pass to dis-
play the wireframe view of the mesh by handling the
triangles through a geometry shader which calculates
internal triangle distances from each vertex to its cor-
responding opposite edge. The smallest distances are
then filtered in a fragment shader and colored differ-
ent. As result it produces a wireframe view at a fast
rate for large meshes.
3.3.3 Data Visualization Renderers
The isoline renderer uses a geometry shader for
checking if an isoline value is within the bounds of
each assembled triangle primitive. If this is the case,
a new line segment is created by linearly interpolating
the values on the edges of the triangle. The perfor-
mance of the above implementation was poor in prac-
tice and a better solution for processing a large model
is presented in the isosurface renderer description.
The isosurface renderer was implemented using
a processing stage and a render stage. Both stages
are executed on the GPU with their own shaders
programs. The algorithm used to build the isosur-
faces is based on the geometry shader marching cubes
algorithm (Icare3D, 2015). In the first stage, Ca-
mar
´
on subdivides every convex polyhedron into tetra-
hedra in a straightforward way. It then pass them
to a geometry shader as 4-vertex primitives of type
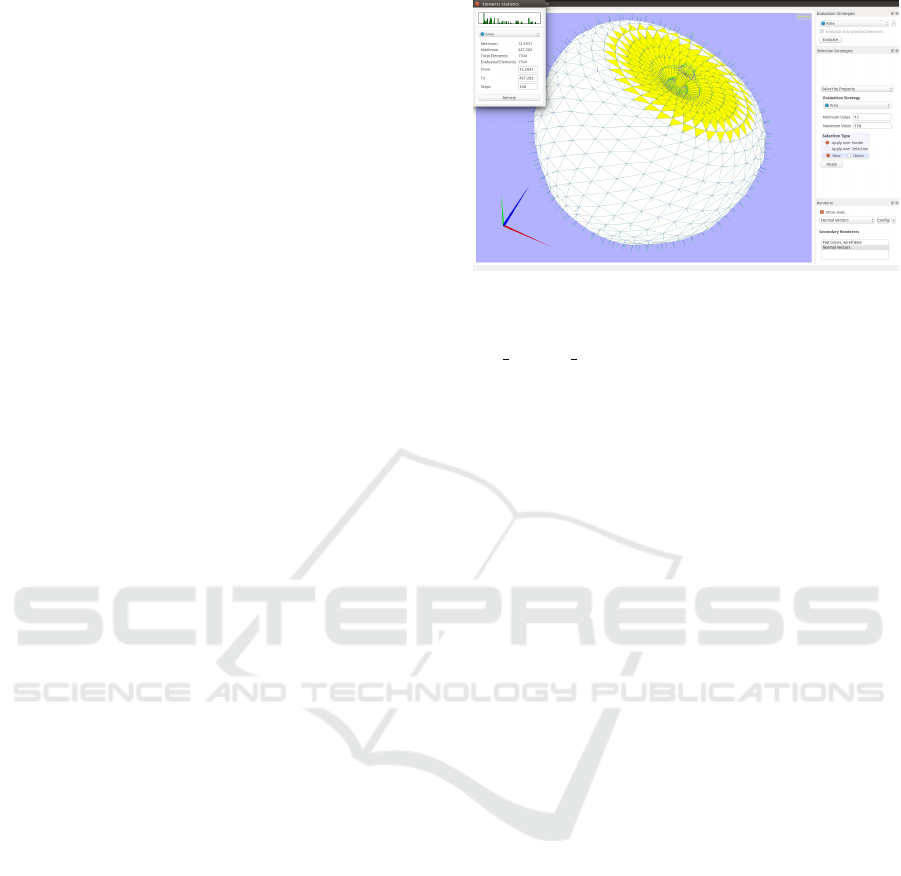
Figure 1: Visualization of an apple model using simultane-
ously three rendering strategies.
GL LINES ADJACENCY. The four vertices are
interpreted as a tetrahedron. Then, up to two triangles
are interpolated per tetrahedron and their vertex po-
sitions are sent to the output of the geometry shader.
Next we use the OpenGLs Transform Feedback func-
tionality to save selected output variables into a buffer
in VRAM. Once the isosurfaces are generated the sec-
ond step takes place to render the new geometries.
Note that the surface generation step is executed only
when the isosurface values are changed by the user or
a new model is loaded. In all other cases like rotation,
zooming or panning only the render stage is applied.
3.4 User Interface
Figure 1 shows the interface of our tool by using a
simple apple model of 1,704 triangles. At the right,
the user can interact with the application. For sur-
face meshes, minimum angle, maximum angle, as-
pect ratio, dihedral angle, and area, among others are
available. Specific criteria for volume meshes are
edge-radius ratio, aspect ratio, solid angle, and vol-
ume among others. The criteria for surface meshes
can also be applied to the faces of the polyhedra. His-
tograms are generated automatically for any criterion.
Elements can be visualized using different colors ac-
cording to their property value. In Figure 1, the yel-
low triangles are the one whose area is between 12
and 150. The histogram shows that there are more
smaller than larger triangles. The range of area val-
ues is shown below the histogram. To see interior
mesh elements, the mesh can be cut by several con-
vex shapes: sphere, several planes and several poly-
gons defining polyhedron or selected with the mouse.
Several renderers are implemented: Glass ren-
derer, Phong renderer, Normal Vector, Flat renderer,
Property renderer and Intersection renderer, among
others. More than one renderer can be applied at
the same time. For the apple model three render-
Camarón: An Open-source Visualization Tool for the Quality Inspection of Polygonal and Polyhedral Meshes
133

Figure 2: Visualization of a tetrahedral model using the
Glass and the Intersection renderer.
ers have been applied: (1) the main renderer is al-
ways used when a selection strategy is chosen. In this
case, it draws the yellow triangles, (2) the Flat ren-
derer draws the white triangles and the black edges
and (3) The Normal Vector renderer shows the nor-
mal vectors. Mesh elements can also be selected and
visualized by specifying their vertex, edge, face and
polyhedron indices. This can be appreciated in Fig-
ure 2 that shows a torso model composed of 168,930
points and 1,082,723 tetrahedra. The torso was drawn
by using the Intersection renderer to cut part of its
shoulder and show some interior elements, the Glass
renderer and the renderer to show the indices of some
selected vertices.
In order to illustrate the isoline renderer, we chose
the Dragon mesh from the Standford Repository. The
triangular mesh has 437,645 vertices and 871,414 tri-
angles. The scalar fields for the models were gener-
ated with a simple pseudo-noise generation algorithm
to ensure the visualization of smooth curves. Figure 3
shows the mesh rendered using gray colors at the left
and the isolines corresponding to 20 scalar values at
the right. In a similar way, Figure 4 shows the applica-
tion of the isosurface renderer to the Permanent Mag-
netic DC motor (pmdc) mesh taken form the Tetview
webpage. The pmdc mesh has 109,189 tetrahedron,
237,291 triangle faces and 27,196 vertices. The iso-
surfaces corresponding to 10 scalar values are shown.
We have also defined and added a new format
called Visf for handling any polyhedral mesh. This
Table 1: Hardware used for testing.
Hardware Detail
CPU Intel Core i5-3210M 2.5 Ghz
GPU Nvidia Geforce GT 650M
Mem 8GB, DDR3, 800 MHz
OS Windows 7
format is similar to the OFF format: after the faces,
the number of polyhedra must be specified and then
each polyhedron with its number of faces followed by
the face indices. Camar
´
on can be downloaded from
http://sourceforge.net/p/camaron/code/ci/master/tree
4 EXAMPLES AND EVALUATION
The performance comparison is done by measuring
the number of frames per second each visualization
tool can generate. This value is obtained through
the application Fraps (Fraps, 2012) for MeshLab, Ge-
omView and TetView. The characteristics of the hard-
ware used for testing are shown in Table 1.
4.1 Rendering of Surface Meshes
The surface meshes used for comparison were taken
from free repositories available through the Internet.
The models, number of vertices, number of poly-
gons and formats are shown in Table 2. We chose
these meshes because their vertex number is close to
2
i
, i = 12, ..., 22. Table 3 shows the frames per second
measured for each visualization tool. The highest fps
value Fraps gave us while measuring the frame rate of
GeomView, MeshLab and TetView was 60fps. Then
we also consider 60fps as the performance rate when
Camar
´
on generates frames at a higher rate. We can
observe that Camar
´
on gets the best performance rates
because it does an intensively used of the GPU and
the others not.
Table 4 shows the amount of RAM used for the
three largest models. Camar
´
on needs more RAM
space than the other tools because it stores the ge-
ometric properties associated to each quality criteria
and several neighbor relationships between mesh el-
ements in order to compute the properties fast. We
also observe as expected that the amount of memory
increases linearly with the amount of vertices.
4.2 Visualization of Volume Meshes
We generated tetrahedral meshes of size 2
i
, i =
14, ..., 19 to compare the performance of Camar
´
on
and TetView. Figure 5 shows the number of vertices,
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
134

Figure 3: Isoline Renderer.
Figure 4: Isosurface Renderer.
Table 2: Geometrical information of the surface meshes.
Object Torus Cow Bunny Lucy Ramses Neptuno Thai
Points 4,800 16,612 35,947 262,999 826,266 2,003,932 4,999,996
Polygons 9,600 33,244 69,451 525,814 1,652,528 4,007,872 9,999,754
Format TRI OFF PLY TRI OFF OFF PLY binary
Table 3: Number of frames per second (fps).
TView GView MLab Camar
´
on
Torus 60 40 60 60
Cow 60 13 60 60
Bunny 57 6 47 60
Lucy 10 1 7 60
Ramses 5 <1 2 60
Neptuno - <1 1 21
Thai - <1 <1 6.5
triangles and tetrahedra of each sphere. The compari-
son is only between Camar
´
on and TetView because
Table 4: Use of RAM(MB).
TView GView MLab Camar
´
on
Ramses 437 137 281 913
Neptuno - 326 465 2,086
Thai - 806 970 4,645
MeshLab and GeomView were designed to handle
surface meshes.
Figure 5 shows two views of a tetrahedral mesh:
at the left side, the sphere was cut by a plane and the
intersection is shown, and at the right its surface is
displayed. Table 6 shows at the left the frames per
Camarón: An Open-source Visualization Tool for the Quality Inspection of Polygonal and Polyhedral Meshes
135
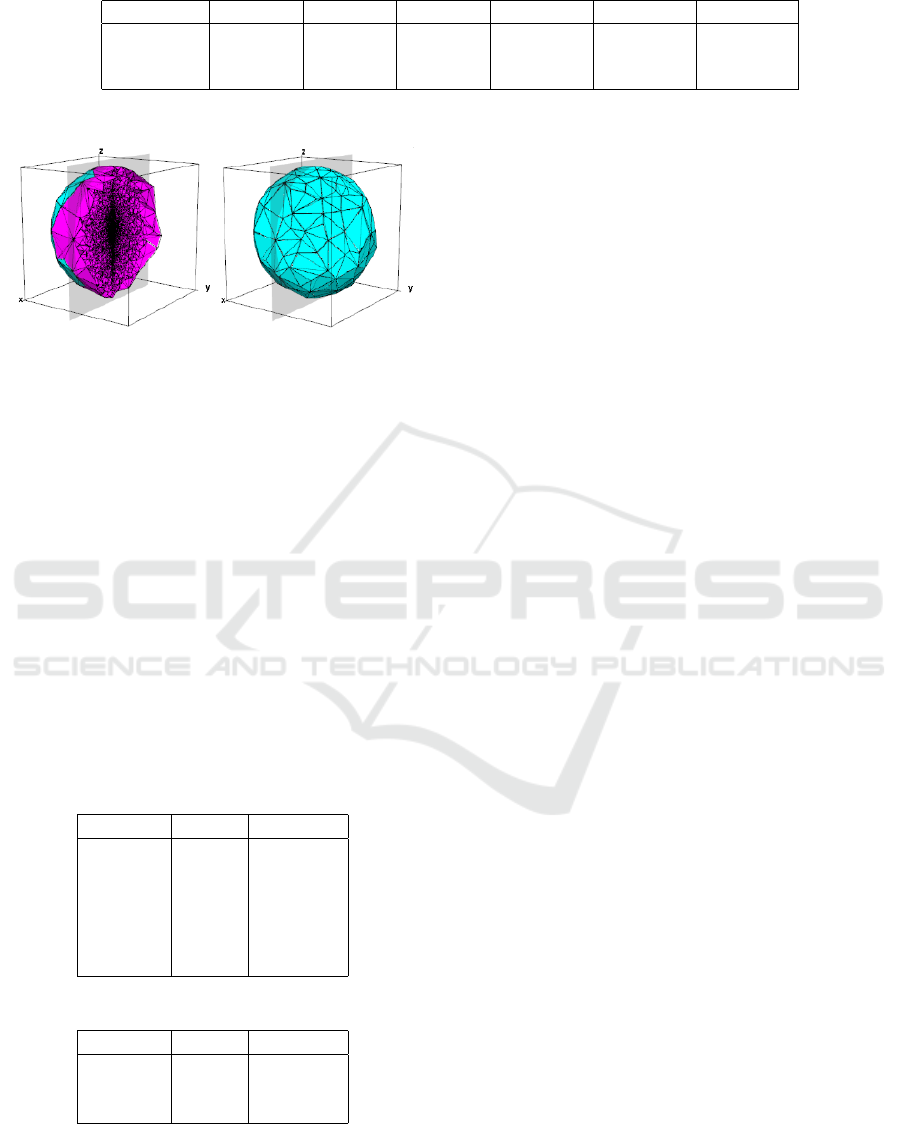
Table 5: Volume meshes.
Object Sphere 1 Sphere 2 Sphere 3 Sphere 4 Sphere 5 Sphere 6
Points 16,384 32,768 65,536 131,072 262,144 524,288
Polygons 219,642 439,898 882,974 1,768,357 3,540,332 7,085,413
Tetrahedra 109,776 219,890 441,409 884,080 1,770,053 3,542,559
Figure 5: TetView visualization of the Sphere 3 cut by a
plane (left) and its surface (right).
second each visualization tool took to visualize the
cut sphere and at the right the whole sphere. We ob-
serve that TetView shows a good performance while
drawing the whole sphere because in this case does
not process all tetrahedra; it only draws the triangles
at the surface and these are few. Our tool instead al-
ways processes all tetrahedra in parallel and in this
case only draws the ones located at the surface. After
cutting the model, the number of interior triangles to
be rendered increases with the size of the tetrahedral
mesh. That is why our tool shows a better perfor-
mance than TetView. Note that TetView is quite slow
if surface meshes have more than 200,000 points as
shown in Table 3. Then it would be a larger perfor-
mance difference between both visualization tools if
larger surface meshes are drawn.
Table 6: Number of frames per second.
TView Camar
´
on
Sphere 1 60:60 60:60
Sphere 2 58:60 60:60
Sphere 3 47:60 60:60
Sphere 4 33.60 60:60
Sphere 5 24:60 22:60
Sphere 6 14:60 9:21
Table 7: RAM usage (MB).
TView Camar
´
on
Sphere 4 110 1,346
Sphere 5 170 2,478
Sphere 6 296 4,010
Table 7 shows the amount of RAM used for the
three largest models. With volume meshes, our tool
also requires more RAM than TetView because of the
same reasons given for surface meshes.
5 CONCLUSIONS AND FUTURE
WORK
We have presented the main characteristics of a new
visualization tool designed for the quality inspection
of surface and volume meshes composed of any con-
vex polygons and polyhedra, respectively. This tool
can also render non-manifold meshes and this is use-
ful when partial meshes are built from images. The
software design guarantees that the tool can easy
evolve in new quality criteria, selection and render
strategies, and new input/output formats.
The performance evaluation is still not complete.
Since we have recently added the visualization of
datasets, we also want to do a comparison with some
of the mentioned data visualization tools (ParaView,
VisIt). Until now, we have only compared its perfor-
mance with MeshLab, TetView and GeomView and
shown that our tool can render in real time large sur-
face and volume meshes on standard desktop comput-
ers.
In the near future we plan to visualize data com-
ing from simulations not necessarily associated to the
mesh vertices. The idea is that a user can interactively
detect and analyze how much not so good quality el-
ements affect the simulation results. We also want to
optimize the memory usage as far as possible.
ACKNOWLEDGEMENTS
This work was partially supported by Fonde-
cyt Project N
o
1120495 and Enlace-Fondecyt
N
o
ENL009/15 (VID, University of Chile).
REFERENCES
Amenta, N., Levy, S., Munzner, T., and Phillips, M. (1995).
Geomview: A system for geometric visualization. In
Proceedings of the Eleventh Annual Symposium on
Computational Geometry, SCG ’95, pages 412–413,
http://www.geomview.org. ACM.
Bærentzen, A., Nielsen, S. L., Gjøl, M., Larsen, B. D.,
and Christensen, N. J. (2006). Single-pass wireframe
rendering. In ACM SIGGRAPH 2006 Sketches, SIG-
GRAPH ’06, New York, NY, USA. ACM.
GRAPP 2016 - International Conference on Computer Graphics Theory and Applications
136

Bastarrica, M. C. and Hitschfeld-Kahler, N. (2006). De-
signing a product family of meshing tools. Advances
in Engineering Software, 37(1):1–10.
Childs, H., Brugger, E., Whitlock, B., Meredith, J., Ah-
ern, S., Bonnell, K., Miller, M., Weber, G. H.,
Harrison, C., Pugmire, D., Fogal, T., Garth, C.,
Sanderson, A., Bethel, E. W., Durant, M., Camp,
D., Favre, J. M., R
¨
ubel, O., Navr
´
atil, P., Wheeler,
M., Selby, P., and Vivodtzev, F. (2011). VisIt:
An End-User Tool For Visualizing and Analyzing
Very Large Data. In Proceedings of SciDAC 2011.
http://press.mcs.anl.gov/scidac2011.
Cignoni, P., Callieri, M., Corsini, M., Dellepiane, M.,
Ganovelli, F., and Ranzuglia, G. (2008). MeshLab:
an Open-Source Mesh Processing Tool. In Scarano,
V., Chiara, R. D., and Erra, U., editors, Eurographics
Italian Chapter Conference. The Eurographics Asso-
ciation.
Contreras, D. and Hitschfeld-Kahler, N. (2014). Genera-
tion of polyhedral delaunay meshes. Procedia Engi-
neering, 82:291 – 300. 23rd International Meshing
Roundtable (IMR23).
Eli
¨
ens, A. (1995). Principles of object-oriented software
development. Addison-Wesley.
Fraps (2012). Realtime Video Capture Software. Beepa, Pty
Lt. http://www.fraps.com.
Gamma, E., Helm, R., Johnson, R., and Vlissides, J. (1995).
Design Patterns: Element of Reusable Object Ori-
ented Software. Addison-Wesley.
Garimella, R. V., Kim, J., and Berndt, M. (2013). Poly-
hedral mesh generation and optimization for non-
manifold domains. In IMR, pages 313–330.
Glew (2012). The OpenGL Extension Wrangler Li-
brary. BSD License, MIT License. http://www.glew.
sourceforge.net.
Halbert, D. and O’Brien, P. (1987). Using types and in-
heritance in object-oriented programming. IEEE Soft-
ware, 4(5):71–79.
Hanwell, M. D., Martin, K. M., Chaudhary, A., and Avila,
L. S. (2015). The visualization toolkit (vtk): Rewrit-
ing the rendering code for modern graphics cards.
SoftwareX, 12:9 – 12.
Henderson, A. and Ahrens, J. (2004). The Paraview guide
: a parallel visualization application. Kitware, Inc.,
New York.
Lethbridge, T. C. and Lagani
´
ere, R. (2005). Object-oriented
software engineering : practical software develop-
ment using UML and Java. Mc Graw Hill Education.
Ramachandran, P. and Varoquaux, G. (2011). Mayavi: 3D
Visualization of Scientific Data. Computing in Science
& Engineering, 13(2):40–51.
Rossel, P. O., Bastarrica, M. C., Hitschfeld-Kahler, N.,
D
´
ıaz, V., and Medina, M. (2014). Domain modeling
as a basis for building a meshing tool software product
line. Advances in Engineering Software, 70:77–89.
Si, H. (2013). TetGen and TetView software. http://tetgen.
berlios.de.
Si, H. (2015). Tetgen, a delaunay-based quality tetra-
hedral mesh generator. ACM Trans. Math. Softw.,
41(2):11:1–11:36.
VisIt (2015). Open Source, interactive, scalable, visu-
alization, animation and analysis tool. Lawrence
Livermore National Laboratory. https://wci.llnl.gov/
simulation/computer-codes/visit.
Vtk (2015). The visualization toolkit. http://www.vtk.org/.
Wolf, D. (2011). Open Gl 4.0. Shading Language Cook-
book. Birminghang. UK. Pack Publishing ltd.
Camarón: An Open-source Visualization Tool for the Quality Inspection of Polygonal and Polyhedral Meshes
137
