
Unified Cloud Orchestration Framework for Elastic High Performance
Computing in the Cloud
Lukasz Miroslaw, Michael Pantic and Henrik Nordborg
Institute for Energy Technology, HSR Hochschule Rapperswil, Rapperswil, Switzerland
Keywords:
Microsoft Azure, High Performance Computing, Cloud Computing, Cloud Orchestrator, Computational Fluid
Dynamics, Simulations.
Abstract:
The demand for computational power and storage in industry and academia is continuously increasing. One
of the key drivers of this demand is the increased use of numerical simulations, such as Computational Fluid
Dynamics for product development. This type of simulations generates huge amounts of data and demands
massively parallel computing power. Traditionally, this computational power is provided by clusters, which
require large investments in hardware and maintenance. Cloud computing offers more flexibility at signifi-
cantly lower costs but the deployment of numerical applications is time-consuming, error-prone and requires
a high level of expertise. The purpose of this paper is to demonstrate the SimplyHPC framework that au-
tomatizes the deployment of the cluster in the cloud, deploys and executes large scale and parallel numerical
simulations, and finally downloads the results and shuts down the cluster. Using this tool, we have been able
to successfully run the widely accepted solvers, namely PETSc, HPCG and ANSYS CFX, in a performant and
scalable manner on Microsoft Azure. It has been shown that the cloud computing performance is comparable
to on-premises clusters in terms of efficiency and scalability and should be considered as an economically
viable alternative.
1 INTRODUCTION
Numerical simulations have become an essential part
of modern R&D, as they allow companies to develop
smarter products faster. Ideally, computer simulations
can be used to test the performance of a product be-
fore the first prototype has been built, providing valu-
able information very early in the product develop-
ment cycle. Computer simulations also allow compa-
nies to test a large number of design variation and to
use numerical optimization algorithms to improve the
performance of products.
Computational fluid dynamics (or CFD for short)
represents one of the greatest challenges in terms of
computational requirements. The advances in paral-
lel computing facilitated the handling of the immense
amount of data generated during complex simula-
tions. Today, industrial-relevant simulations can only
be efficiently executed on parallel compute clusters
with hundreds of CPU cores connected through a fast
high-performance network such as Infiniband. Un-
fortunately, such a computational infrastructure repre-
sents a significant investment and only makes sense if
the computational cluster is heavily utilized to amor-
tize the costs. This is generally not an issue for uni-
versities and research institutes, but represents a real
problem for profit driven companies, who only occa-
sionally need access to significant computing power.
An underutilized compute cluster is simply too expen-
sive to maintain.
Most modern CFD solvers support parallel pro-
cessing through the Message Passing Interface (MPI).
Recently, support for multi-core processors, GPUs,
and the Intel Xeon Phi have begun to be implemented
(Tomczak et al., 2013) (Che et al., 2015). Generally
speaking, CFD simulations are very well suited for
parallel processing. They can be easily parallelized
using domain decomposition and the computational
performance is mainly limited by memory bandwidth.
Cloud computing has become ubiquitous due to its
flexibility and cost-efficiency. It has clear advan-
tages over traditional on-premises systems for insti-
tutions with limited budgets as no direct investments
are needed and machines can be rented on a daily,
hourly or even minute-by-minute basis. Users bene-
fit from the cloud through the possibility of launching
jobs of different sizes on dynamically sized systems
and the cloud operators achieve economies of scale by
building large data centers where the resources can be
shared between different workloads.
Miroslaw, L., Pantic, M. and Nordborg, H.
Unified Cloud Orchestration Framework for Elastic High Performance Computing in the Cloud.
DOI: 10.5220/0005842402910298
In Proceedings of the International Conference on Internet of Things and Big Data (IoTBD 2016), pages 291-298
ISBN: 978-989-758-183-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
291

An increasing amount of computing power is now
hosted on cloud platforms such as Amazon Elas-
tic Compute (EC2), Google Compute Engine or Mi-
crosoft Azure and more and more software and ser-
vices are being hosted in the cloud. Many indepen-
dent software vendors started to offer cloud services
to scale scientific applications for specific industries.
Companies like Rescale, Ciespace, Ubercloud, Sabal-
core, Univa, Penguin Computing provide cloud ser-
vices for weather research, computational fluid dy-
namics, structural mechanics, quantitative finance,
combustion, electromagnetics and molecular dynam-
ics (Gentzsch, 2012). They offer access to VMs with
pre-installed software or a web portal where the sci-
entific applications, such as ANSYS, Gromacs, Open-
FOAM or Gerris solvers (Popinet, 2003) can be exe-
cuted.
While this may be a satisfying solution for some, the
ability to run custom or third-party software on the
cloud infrastructure requires much more complicated
procedures. A scientific application that needs to be
deployed in the cloud usually consists of a command
line-tool that requires complex deployment steps such
as installation, configuration as well as setting up sys-
tem specific services and network policies, compara-
ble to the effort of administering an on-premises clus-
ter. Access to the deployed applications from a lo-
cal machine is also a tedious procedure and requires a
significant amount of effort. This partly explains why
this scenario is often too cumbersome for a domain
engineer or a scientist.
A simple mechanism is needed to simplify the
whole process and lower the entry barrier for cloud-
based numerical simulations. Such mechanisms exist
for Amazon EC2 or Eucalyptus but the second biggest
public cloud provider, i.e. Microsoft Azure still lacks
an easy-to-use framework to simplify cloud orchestra-
tion, and this is the reason why we targeted this cloud
provider.
In this paper, we present a unified framework,
named ”SimplyHPC”, that greatly simplifies the use
of a distributed application on Microsoft Azure. The
framework combines Azure specific HPC libraries,
deployment tools, machine and MPI configuration
into a common platform. Its functionality is, among
others, exposed through PowerShell commandlets
that ease the submission process while keeping the de-
sired command line environment and flexibility. The
framework provides tools with the ability to elasti-
cally deploy an arbitrary number of virtual machines
dynamically, submit the packed application together
with input and configuration files, execute it as a cloud
service using MPI and, once the results are ready,
download them to the local machine and stop the vir-
tual machines. The results presented here is a fol-
low up research of our recent studies (Miroslaw et al.,
2015)
Our paper focuses on the following aspects. Sec-
tion 3 describes the main components of the proposed
framework as well as the platform architecture. Sec-
tion 4 demonstrates the utility of the tool on two scien-
tific applications, namely PETSc and HPCG. In addi-
tion we present the scalability study of ANSYS CFX,
a commercial fluid dynamics code for realistic, indus-
trial simulations. The paper ends with conclusions
and future plans.
2 BACKGROUND
This section examines the typical impediments in de-
ployment of HPC applications. It also briefly exam-
ines related technologies and introduces the platforms
and technologies used in performance studies in the
cloud and in the on-premises cluster.
Due to the fact that the cloud providers are com-
mercial entities that compete on the market, it is very
difficult to create a single orchestrator that supports
the major cloud platforms. The cloud infrastructure
changes very quickly, the new APIs, services and
tools are released frequently and addressing them in
one consistent software is very difficult. For example
existing libraries such as Apache jclouds or libcloud
do not support HPC functionality based on Microsoft
technologies. This is the reason why we decided to
target the Microsoft Azure platform with our cloud
orchestrator.
Cloud orchestrators, such as the one presented in
this paper, manage the interactions and interconnec-
tions among cloud-based and on-premises units as
well as expose various automated processes and as-
sociated resources such as storage and network. They
have become a desired alternative to standard deploy-
ment procedures because of lower level of expertise
and reduced deployment time. Also their ability to
perform the vertical and horizontal scaling is funda-
mental to the adoption of the framework in HPC sce-
narios.
HPC Pack is a cloud orchestrator developed by Mi-
crosoft for monitoring, executing and running jobs in
both on-premises and in the cloud. It exposes func-
tionality that is typical for cluster management soft-
ware such as deployment of clusters with different
configurations, a scheduler that maximizes an utiliza-
tion of the cluster based on priorities, policies and
usage patterns and a batch system for submission
of multiple jobs with different amount of resources.
The framework also allows for deployment of hy-
IoTBD 2016 - International Conference on Internet of Things and Big Data
292

brid clouds, for example deploying a head node on-
premises and controlling Azure PaaS nodes or de-
ploying the head node as a IaaS VM and controling
PaaS VMs from the local machine. Although it is a
recommended framework to control the cluster in the
Azure cloud, we will show that HPC Pack is not suit-
able for high performance computing by comparing
its deployment time with SimpyHPC.
2.1 Related Work
Although cloud orchestrators play an important role,
still there are only a few easy to use, out-of-the box
platforms that simplify deployment, monitoring and
accessing scientific applications in the cloud. The
best situation is in Amazon EC2 where frameworks
to simplify the process of orchestration of specific
scientific applications exist. Linh Manh Pham et.
al presented a distributed application Roboconf or-
chestrator for multi-cloud platforms and domain spe-
cific language to describe applications and their ex-
ecution environment (Pham et al., 2015). Wong and
Goscinski propose a unified framework composed of
a series of scripts for running gene sequencing anal-
ysis jobs through a web portal (Wong and Goscin-
ski, 2013) on Amazon EC2 (IaaS) infrastructure. For
this purpose they designed a HPC service software
library for accessing high level HPC resources from
the IaaS cloud and demonstrate their framework in
running mpiBLAS . Balgacem et al. measured the
multiphase flow on a hybrid platform combined with
Amazon EC2 and a private cluster (Ben Belgacem
and Chopard, 2015). Marozzo et. al (Marozzo Fab-
rizio, 2013) present a web-based framework for run-
ning pre-defined workflows composed of web ser-
vices in Microsoft Azure. The authors demonstrate
the framework in data mining applications by deploy-
ing an execution workflow running a single classifica-
tion algorithm and measure strong scalability in clas-
sifying different data sets that were previously parti-
tioned. Last but not least, it is important to mention
the recently released Azure Batch service aimed at
running cloud-scale jobs. However, there is a signifi-
cant amount of programming skills needed to deploy
an application.
2.2 Microsoft Azure
Microsoft Azure is a cloud computing platform that
provides, among many other services, virtual ma-
chines (VMs) in both IaaS and Paas models. PaaS
machines, also called Worker roles, are mainly tar-
geted at developers seeking to execute custom soft-
ware in a high-availability or distributed fashion. In
this model, software running on worker roles can be
automatically scaled and copied to many nodes.
A set of worker roles constitutes a Cloud Ser-
vice on Microsoft Azure. Instead of configuring all
VMs manually, the user uploads a packaged applica-
tion together with configuration files for a cloud ser-
vice. This ”deployment package” is then installed on
fresh VMs automatically and in parallel. This pro-
cedure usually takes a few minutes and is attractive
in terms of usage costs, as these non-persistent VMs
can be created when needed and deleted immediately
after usage. Regular VMs (IaaS) are bare machines
deployed with a specific OS that cannot be scaled
manually or programatically within the Azure Cloud
but can also be scaled and managed through external
frameworks such as Ansible, Chef or Puppet.
In our framework we decided to take advantage
of the cloud service (PaaS) to simplify the orchestra-
tion procedure and use Blob and Table storage enti-
ties for data management. Because the storage can be
locally or geo-redundant, a high availability and per-
sistence of the results from the simulations could be
easily guaranteed.
2.3 Numerical Software
Sparse linear algebra inspired the use cases presented
in this study. Large sparse matrices are generated
during the discretization of partial differential equa-
tions and often appear in scientific or engineering ap-
plications. We have selected two scientific software
tools, namely PETSc and High Performance Conju-
gate Gradient (HPCG) Benchmark to demonstrate the
utility of our framework, to measure the performance
on both Microsoft Azure and the local cluster.
In addition to the numerical tools, we have se-
lected ANSYS CFX, a high performance fluid dy-
namic software that is well recognized in CFD com-
munity and has been successfully applied to different
fluid flow problems.
3 ARCHITECTURE
In this section, the three main architectural aspects
of SimplyHPC are presented. Firstly, we show the
system components visible to a single node such
as cluster settings, communication setup and Azure-
specific elements. Secondly, we discuss the struc-
ture of the SimplyHPC framework at the cluster level
and explain how the software automatizes the setup
of nodes and clusters using the given system architec-
ture. Thirdly, we briefly present the software archi-
tecture.
Unified Cloud Orchestration Framework for Elastic High Performance Computing in the Cloud
293
3.1 Node Architecture
As implied in Sec. 2, there are different type of ma-
chines available on Microsoft Azure. Here, Worker
Roles are used, as they have various advantages over
traditional virtual machines, especially in terms of
manageability and scalability. Worker roles are set
up using a Deployment Package. This package con-
tains a full description of the virtual machine, includ-
ing machine-specific configuration such as local stor-
age requirements, network settings, security settings
as well as software specific settings. New Worker
roles are then automatically set-up according to this
deployment package. This is done by the server
management software, subsequently called the Azure
Cloud Controller that exposes these APIs and is pro-
vided by Microsoft as the main interface to the Azure
Cloud.
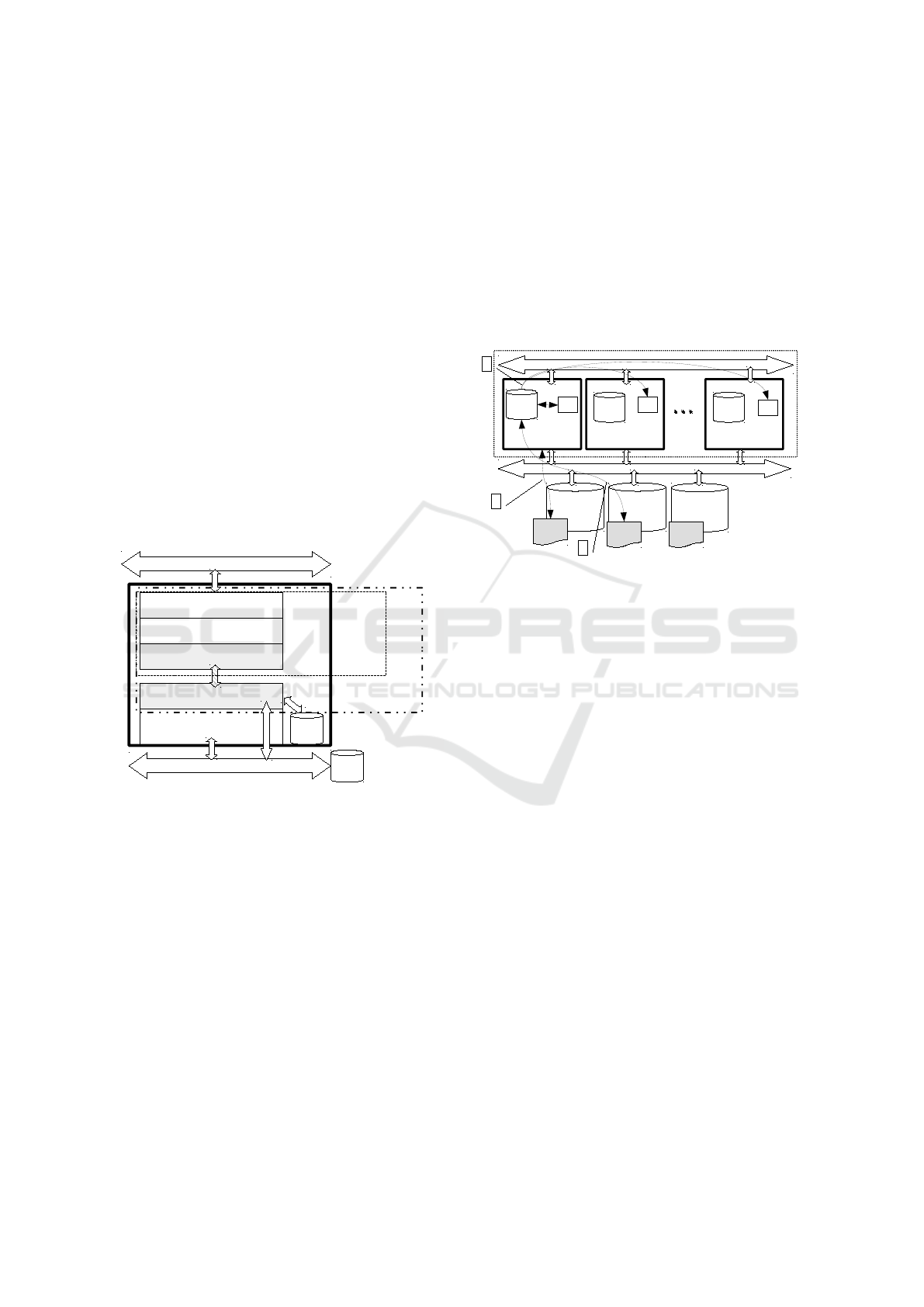
In Fig. 1, the schematic architecture of a single
node is shown (one worker role equals to one node of
a cloud cluster).
Azure Framework
SimplyHPC Role DLL
MPIWrapper
SMPD
MSMPI
Deployment
Infiniband/Ethernet
Internet / Azure Network
Loc.
Stor
Azure
Stor.
MPI Context
Figure 1: Schematic view of a single compute node on
Azure.
It is important to note that this node architecture
applies to all nodes in a cloud cluster, and is automat-
ically configured using the aforementioned deploy-
ment package.
3.2 Cluster Architecture
Fig. 2 visualizes all relevant components of a de-
ployed HPC cluster that has been set up using the
SimplyHPC framework. A cloud service (dotted rect-
angle in figure) represents a bundle of multiple nodes
using the same deployment template. Using the logi-
cal entity of a cloud service, nodes can be easily con-
figured in terms of their number, size and the virtual
network they belong to. When using A8/A9 nodes
for scientific computing, the inter-node network (de-
picted as the upper arrow in Fig. 2) is realized with In-
finiband. In this mode all inter-node storage and MPI
requests are transparently redirected to this very low
latency, high bandwidth interconnect. Such configu-
ration is crucial for performance with most scientific
software that take advantage of concurrency.
The availability of fast inter-node connections
strongly influences the choice of storage for different
tasks.
Instance 0
Infiniband/Ethernet
Internet / Azure Network
Local
Storage
Azure Table
Storage
Azure Blob
Storage
Azure
Virtual Drive
Instance 1
Local
Storage
Instance n
Local
Storage
Job Config
Job Data /
Results
Software
Proc
Proc
Proc
Cloud Service
A
B
C
Figure 2: Schematic view of a SimplyHPC Cluster on
Azure.
3.3 Software Architecture
SimplyHPC has been written in .NET and uses Azure
mechanisms that automate the process of setting up
the cluster described before. There are multiple lev-
els at which the SimplyHPC interacts with Microsoft
Azure. It is linked to the Microsoft Azure SDK and
uses parts of it to automatize the compilation of the
deployment packages. On a run-time level, it inter-
acts directly with the management interface of Mi-
crosoft Azure to create cloud services, upload deploy-
ment packages, monitor machine status, etc.
We expose two different front ends to the user,
namely PowerShell commandlets and a high-level
API with a facade that hides all the complexity of or-
chestrating the cloud. PowerShell is a object-oriented
command line environment used to script and autom-
atize common tasks.
PowerShell commandlets are building blocks that
allow administrators to prepare custom scripts. Its
interface provides a number of useful commandlets
needed to deploy a scientific application in the cloud,
execute it, download the results back to the user and
destroy the cluster. The users of the software have
also the possibility to adapt the code to their needs
since the software is freely available at Github (see
the last Section for more details).
IoTBD 2016 - International Conference on Internet of Things and Big Data
294

4 RESULTS
In the following sub-sections we compare the set-up
time of the cluster created with SimplyHPC with HPC
Pack, since this is a standard tool for cluster deploy-
ment that is currently supported and recommended by
Microsoft. We also measure the performance of cloud
clusters on Microsoft Azure and regular on-premises
cluster using test cases relevant for CFD applications.
Although these measurements are not representative
due to different hardware configurations on both sys-
tems, they still provide insights on the performance
of numerical code in the cloud. These examples serve
also as an indication that running different kinds of
simulation with SimplyHPC is feasible.
All tests were performed either on Microsoft
Azure (cloud cluster) or on the on-premises cluster.
On-premises cluster is a privately owned and main-
tained system at Microsoft Innovation Center at the
HSR Hochschule Rapperswil (HSR), Switzerland. It
is composed of 32 nodes with 48GB RAM and two In-
tel Xeon E5645 6 cores each, the nodes are connected
with 40Gbit Infiniband Network. On each node, Win-
dows Server 2012 R2 with HPC Pack 2012 R2 is
installed. On Microsoft Azure two VM types were
used: A8 nodes with 8 core Intel Xeon E5-2670 and
56 GB RAM and A4 nodes with 8 core CPU, 14 GB
RAM and GigE interconnect. High-bandwidth In-
finiband interconnect between the nodes was possible
only for A8 and A9 nodes. For performance studies
of PETSc and HPCG we used A4 and A8 nodes while
for ANSYS performance tests we used A8 nodes only.
For more detailed information about Microsoft Azure
node types see the official specification.
4.1 Set-up time
The deployment time of a cluster in the cloud is cru-
cial when using dynamically allocated systems and
running computationally intensive tasks composed of
a single job or a small series of jobs. In such scenar-
ios the cluster is created to perform the computational
tasks and is destroyed afterwards. We do not consider
the set-up time on on-premises systems and focus on
the cloud-based scenario only.
We compared the time needed for setting up a
cloud cluster consisting of A8 nodes with SimplyHPC
and Microsoft HPC Pack. This time should be of the
same order regardless of the node size, because the
deployment processes are similar. HPC Pack provides
precise statistics on the deployment procedure that in-
cludes also creating a storage account, a virtual net-
work, a cloud service, a domain controller as well as
deployment and configuration time for the head node
and compute nodes. This is also the reason why the
deployment procedure takes more than an hour. Since
in SimplyHPC most of these processes are omitted,
as expected the time needed to deploy the head node
and compute nodes was much shorter, e.g. we mea-
sured the time needed to deploy a new cloud service
with a single job. Since HPC Pack neither provides
automatic job submission nor it retrieves the result
we have not taken these processes into account in our
measurements.
00:00:00
00:30:00
01:00:00
01:30:00
02:00:00
02:30:00
03:00:00
8 16 32 8 16 32
Time [hh:mm:ss]
Number of A8 nodes
Set-up time Cloud Cluster w A8 nodes
Preparation
Deployment
Prepare Cloud Service
Create domain controller
Create nodes
HPCPackSimplyHPC
Figure 3: Deployment time of cluster composed of differ-
ent number of A8 nodes with Microsoft HPC pack (right)
and SimplyHPC framework (left). Time is provided in
hh:mm:ss format.
4.2 Sparse Matrix Solver Performance
The objective of the second experiment was to com-
pare the performance of a cloud cluster on Microsoft
Azure with a traditional on-premises cluster using
common distributed parallel sparse matrix solvers
such as HPCG (High Performance Conjugate Gradi-
ents) Benchmark as a standardized performance test
and PETSc solver being applied to two different real
world problems. On Microsoft Azure, the HPCG re-
sults scale nearly linearly with the number of cores,
with a maximum speed-up of approx. 36 with 64
cores (compared to 1 core) for A8 nodes. With A4
nodes, the scaling is not as desirable, probably also
due to the lack of the low-latency Infiniband intercon-
nect. The dynamic cloud-based cluster easily outper-
formed the on-premises cluster (see Fig. 4).
PETSc was run with two different matrices: ruep
and nord. The ruep matrix is a 1162315 × 1162315
sparse real symmetric matrix with a total of 34.28 ∗
10
6
non-zero values. The second matrix, nord, was
generated from a thermal transient heat conduction
simulation on a 3-dimensional Cartesian mesh of
moderate size. It is a 398718 × 398718 sparse real
symmetric matrix with a total of 1.1 ∗ 10
6
non-zero
values.
In Fig. 4 the measurements for the PETSc trials
are shown. From the diagram it is clear that the per-
Unified Cloud Orchestration Framework for Elastic High Performance Computing in the Cloud
295
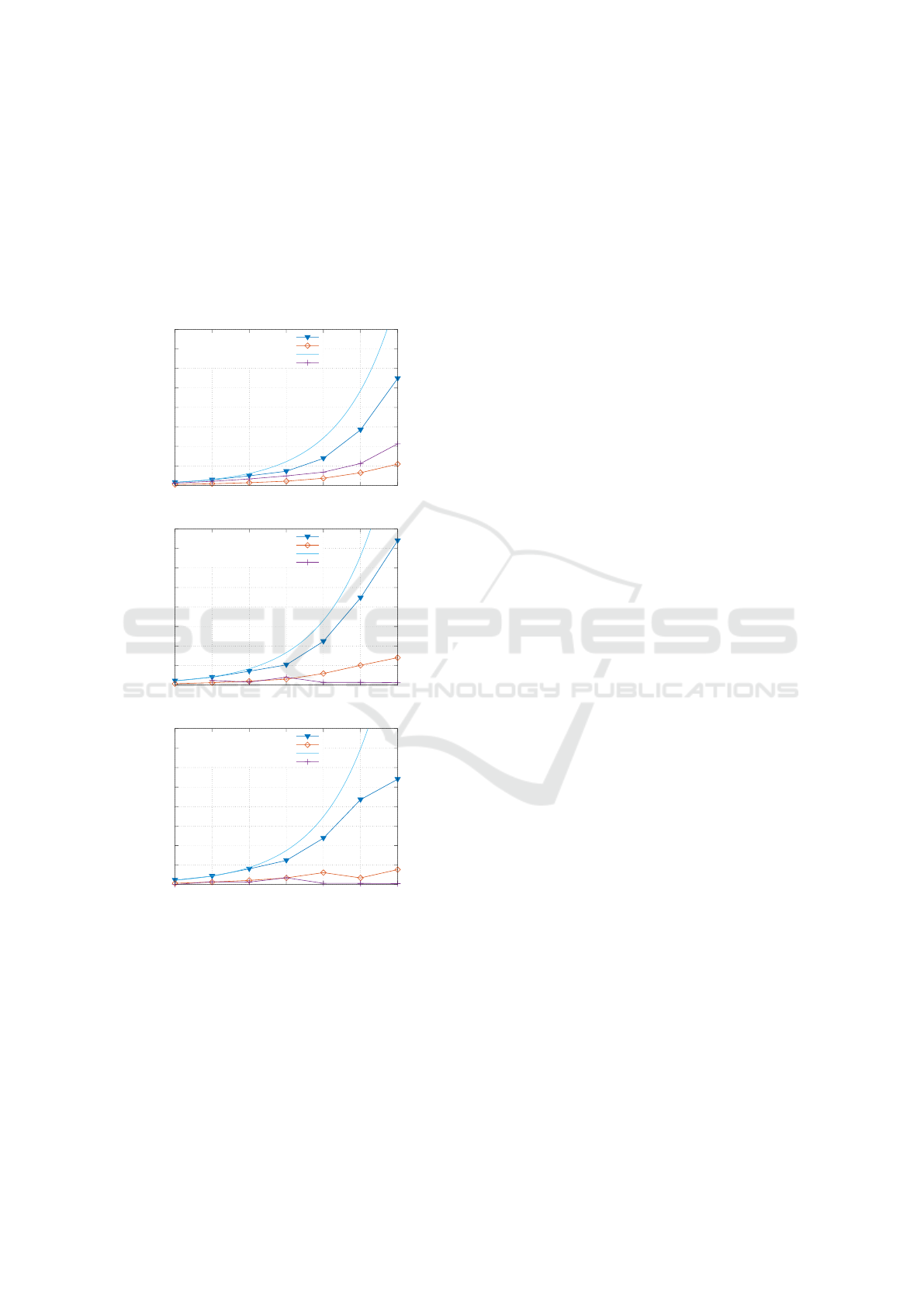
formance on Azure nodes is close to ideal, while on
the on-premises cluster is much worse, mostly be-
cause the memory bandwidth is insufficient for this
core configuration and code. Because of the huge dif-
ference in the performance between A8 and A4 nodes,
only cloud clusters with A8 nodes were taken into ac-
count for subsequent tests with ANSYS CFX on Mi-
crosoft Azure.
0
5
10
15
20
25
30
35
40
1 2 4 8 16 32 64
HPCG Result [GFLOPs]
Total number of cores
GFLOPs HPCG
Azure A8
Azure A4
Azure A8 (ideal scaling)
On-Premises Cluster
0
5
10
15
20
25
30
35
40
1 2 4 8 16 32 64
Throughput PETSc solver [GFLOPs]
Total number of cores
GFLOPs PETSc Solver Matrix 'ruep'
Azure A8
Azure A4
Azure A8 (ideal scaling)
On-Premises Cluster
0
5
10
15
20
25
30
35
40
1 2 4 8 16 32 64
Throughput PETSc solver [GFLOPs]
Total number of cores
GFLOPs PETSc Solver Matrix 'nord'
Azure A8
Azure A4
Azure A8 (ideal scaling)
On-Premises Cluster
Figure 4: Performance in GFLOPs of HPCG (up) and
PETSc (middle and bottom) solvers with different node
sizes on Microsoft Azure and on the on-premises cluster.
4.3 ANSYS CFX Performance Study
We used ANSYS CFX as an example of a widely used
tool for large-scale physical simulations. A set of in-
dependent simulations of a heat transfer simulation in
a heat exchange system (subsequently called the pipe
case).
In all the cases we modeled the steady state flows
with residual targets of 1e − 06 and maximal number
of iterations of 200.
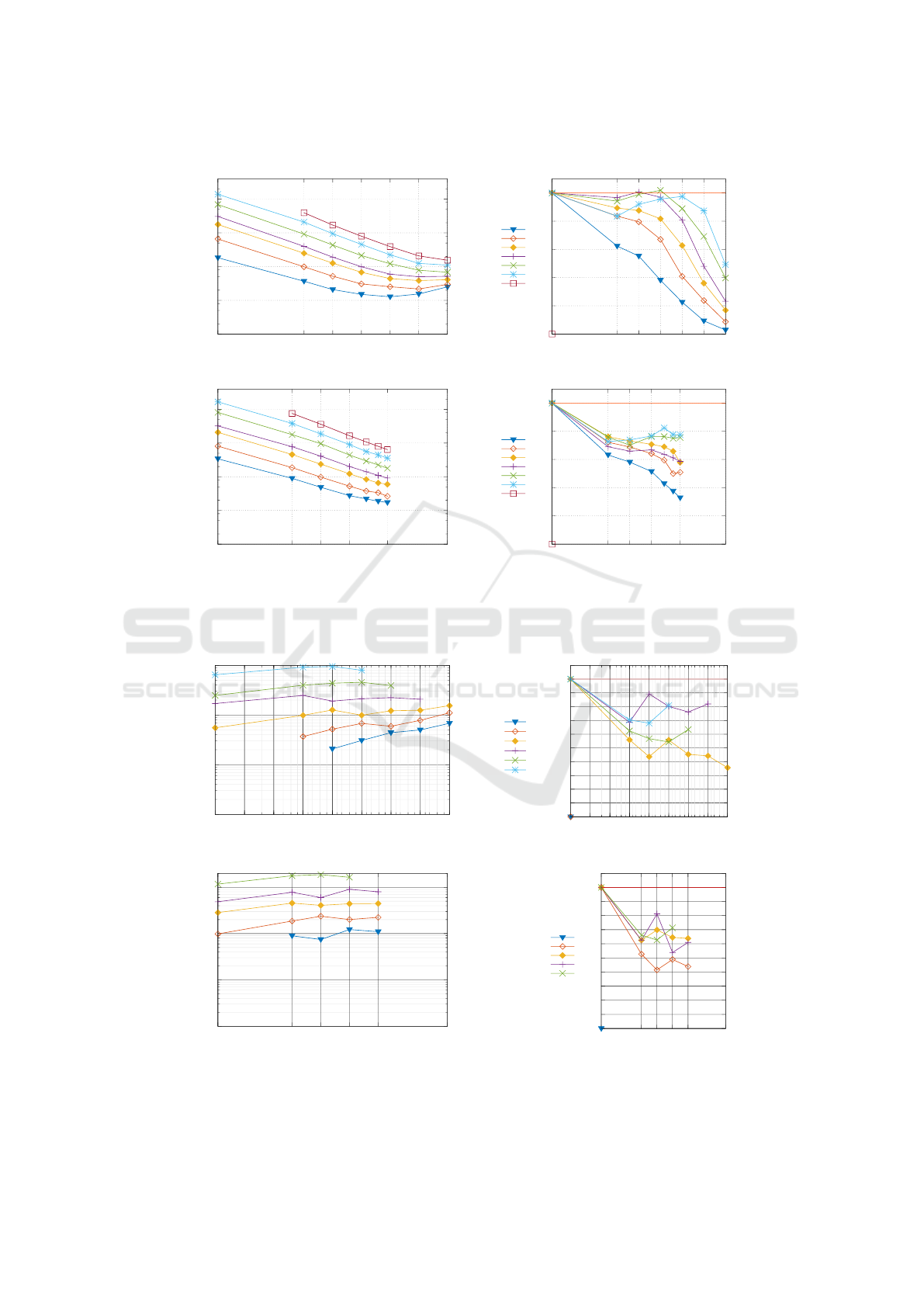
4.3.1 Strong and Weak Scaling of the Heat
Exchange Simulation
For the strong scaling tests, the pipe01–pipe08 prob-
lems were solved on different cluster configurations.
The size of each pipe case was doubled and ranged
from ca. 200 thousands elements to ca. 16 million
elements. Note that the largest problem, pipe08, pro-
duced a memory overflow in a one core configura-
tion and therefore the pipe08 strong scaling efficiency
could not be computed. For the other cases, the strong
scaling efficiency has been calculated according to
formulas proposed by (Kaminsky, 2015). For the sec-
ond largest problem, pipe07, the sequential run-time
has been extrapolated, as 180 of 200 iterations could
be calculated before the memory overflow and the in-
crease of calculation time per iteration was approxi-
mately a constant fraction.
We could observe a good scaling for ANSYS CFX
(see Fig. 5). The run-time is comparable, although
the strong scaling efficiency on the cloud cluster is
much better - this might be due to memory bandwidth
limitations on the on-premises cluster (scaling from 1
to 6 cores greatly decreased efficiency). In the case
of large cloud clusters (e.g. 128 cores on 32 nodes)
much larger problems are needed to fully utilize their
capabilities. As it can be seen from the figure the
strong scaling efficiency for small problems rapidly
decays. Even for larger problems the efficiency is
worse with 256 cores, partly due to communication
overhead.
A test with 64 with a total of 512 cores resulted in
a MPI Broadcast timeout which might be due to the
inefficient use of MPI collective operations or subop-
timal broadcast algorithms (also reflected in the mea-
sured communication overhead). A hybrid approach
(multi-threading together with MPI) and/or MPI tun-
ing could circumvent such problems.
In order to measure weak scaling and weak scal-
ing efficiency the problem size per processor core is
kept constant while increasing the number of proces-
sor cores. The weak scaling efficiency is calculated
according to formulas described in (Kaminsky, 2015).
In Fig. 6 the weak scaling measured on cloud clus-
ters and the on-premises cluster is visualized. For
ideal weak scaling a horizontal curve is observed, as
the increase of problem data is proportional to the in-
crease of cores. Here it is also evident that for large
problems both clusters scale well.
IoTBD 2016 - International Conference on Internet of Things and Big Data
296
Strong Scaling of Ansys CFX on Azure A8 nodes
1E1
1E2
1E3
1E4
1E5
1 8 16 32 64 128 256
Calculation time [s]
Total number of cores
Runtime
0.0
0.2
0.4
0.6
0.8
1.0
1 8 16 32 64 128 256
Efficiency
Total number of cores
Efficiency
pipe01
pipe02
pipe06
pipe04
pipe05
pipe07
pipe08
Strong Scaling of Ansys CFX on On-Premises Cluster nodes
1E1
1E2
1E3
1E4
1E5
1 6 12 24 60 256
Calculation time [s]
Total number of cores
Runtime
0.0
0.2
0.4
0.6
0.8
1.0
1 6 12 24 60 256
Efficiency
Total number of cores
Efficiency
pipe01
pipe02
pipe06
pipe04
pipe05
pipe07
pipe08
Figure 5: Run-time and strong scaling efficiency of ANSYS CFX for pipe01–pipe08 in the cloud (up) and on-premises cluster
(bottom).
Weak Scaling of Ansys CFX on Azure A8 nodes
1E1
1E2
1E3
1E4
1 2 4 8 16 32 64 128 256
Calculation time [s]
Total number of cores
Runtime
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1 2 4 8 16 32 64 128 256
Efficiency
Total number of cores
Efficiency
Elements per Processor
1.48E+04
2.98E+04
6.13E+04
1.26E+05
2.50E+05
5.01E+05
Weak Scaling of Ansys CFX on On-Premises Cluster nodes
1E1
1E2
1E3
1E4
1 6 12 24 48 256
Calculation time [s]
Total number of cores
Runtime
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1 6 12 24 48 256
Efficiency
Total number of cores
Efficiency
Elements per Processor
3.72E+04
7.95E+04
1.68E+05
3.35E+05
6.65E+05
Figure 6: Run-time and weak scaling efficiency of ANSYS CFX in the cloud (up) and on-premises cluster (bottom).
Unified Cloud Orchestration Framework for Elastic High Performance Computing in the Cloud
297

5 CONCLUSION
We presented the SimplyHPC framework, a novel dis-
tributed framework for Microsoft Azure. The frame-
work is composed of a light–weight API and a set
of commandlets on top of that. The modules auto-
mate the complex deployment procedure that is nec-
essary to run third-party applications from the local
machine. Specially designed mechanism keeps track
of running jobs in the cluster and a special service
in the head node regularly checks the job status and
uploads the results to the blob storage as soon as the
job finished successfully. Since table and blob storage
are distributed and mirrored, a high-availability and
persistence of the job data is guaranteed. In contrary
to HPC Pack from Microsoft, all unnecessary system
components and services have been omitted and as a
result the time needed to deploy the cluster has been
reduced from more than an hour to a few minutes. We
have demonstrated that the framework supports the
deployment of both commercial and the open–source
applications. Although we focused on fluid flow and
numerical simulations the software is well suited to
any research domain that uses software with a com-
mand line interface and supports MPI–based paral-
lelization. We demonstrated that SimplyHPC can be
used also in a scenario where both input and output
data are usually massive. We also showed that for
extreme scaling fine–tuning of the hardware configu-
ration and MPI settings may be still necessary.
The paper clearly shows that scientists and engi-
neers applications can benefit from the cloud if the
calculations are too time–consuming for a local ma-
chine or a private cluster and that they can advan-
tage of the competitive prices and the most recent
hardware. Today, it is possible to deploy a 64–cores
cluster for less than $30 and this price is likely to
be lower when the reader reads this paper. Further,
our scalability tests provide insights into the expected
performance on Microsoft Azure up to 256 cores.
SimplyHPC software is freely available at GitHub at
https://github.com/vbaros/SimplyHPC.
ACKNOWLEDGEMENTS
The framework has been developed in Microsoft In-
novation Center Rapperswil at HSR Hochschule Rap-
perswil, Switzerland. The scalability tests have been
performed in Microsoft Azure as a part of Microsoft
Research Grant No. Azdem187T 64934Y . We would
like also express our gratitude to Adrian Rohner, Ro-
man Fuchs, Rita Rueppel and Vladimir Baros from
HSR Hochschule Rapperswil for support and fruitful
discussions.
REFERENCES
Ben Belgacem, M. and Chopard, B. (2015). A hybrid
HPC/cloud distributed infrastructure: Coupling EC2
cloud resources with HPC clusters to run large tightly
coupled multiscale applications. Future Generation
Computer Systems, 42:11–21.
Che, Y., Xu, C., Fang, J., Wang, Y., and Wang, Z. (2015).
Realistic performance characterization of cfd applica-
tions on intel many integrated core architecture. The
Computer Journal.
Gentzsch, W. (2012). How cost efficient is hpc in the cloud?
Technical report, Ubercloud.
Kaminsky, A. (2015). Solving the World’s Toughest Compu-
tational Problems with Parallel Computing. Creative
Commons Attribution.
Marozzo Fabrizio, Talia Dominico, T. P. (2013). A cloud
framework for big data analytics Workflows on Azure.
Advances in Parallel Computing. IOS Press.
Miroslaw, L., Baros, V., Pantic, M., and Nordborg, H.
(2015). Unified cloud orchestration framework for
elastic high performance computing on microsoft
azure. In Summary of Proceedings, NAFEMS World
Congress, page 216. NAFEMS Ltd.
Pham, L. M., Tchana, A., Donsez, D., de Palma, N., Zur-
czak, V., and Gibello, P.-Y. (2015). Roboconf: A
hybrid cloud orchestrator to deploy complex applica-
tions. In Cloud Computing (CLOUD), 2015 IEEE 8th
International Conference on, pages 365–372.
Popinet, S. (2003). Gerris: a tree-based adaptive solver
for the incompressible Euler equations in complex
geometries. Journal of Computational Physics,
190(2):572–600.
Tomczak, T., Zadarnowska, K., Koza, Z., Matyka, M., and
Miroslaw, L. (2013). Acceleration of iterative navier-
stokes solvers on graphics processing units. Inter-
national Journal of Computational Fluid Dynamics,
27(4-5):201–209.
Wong, A. K. and Goscinski, A. M. (2013). A unified frame-
work for the deployment, exposure and access of HPC
applications as services in clouds. Future Generation
Computer Systems, 29(6):1333–1344.
IoTBD 2016 - International Conference on Internet of Things and Big Data
298
