
Tracking The Invisible Man
Hidden-object Detection for Complex Visual Scene Understanding
Joanna Isabelle Olszewska
School of Computing and Technology, University of Gloucestershire, The Park, Cheltenham, GL50 2RH, U.K.
Keywords:
Surveillance Application, Visual Scene Analysis, Automated Scene Understanding, Knowledge Representa-
tion, Spatio-temporal Visual Ontology, Symbolic Reasoning, Computer Vision, Pattern Recognition.
Abstract:
Reliable detection of objects of interest in complex visual scenes is of prime importance for video-surveillance
applications. While most vision approaches deal with tracking visible or partially visible objects in single or
multiple video streams, we propose a new approach to automatically detect all objects of interest being part
of an analyzed scene, even those entirely hidden in a camera view whereas being present in the scene. For
that, we have developed an innovative artificial-intelligence framework embedding a computer vision process
fully integrating symbolic knowledge-based reasoning. Our system has been evaluated on standard datasets
consisting of video streams with real-world objects evolving in cluttered, outdoor environment under difficult
lighting conditions. Our proposed approach shows excellent performance both in detection accuracy and
robustness, and outperforms state-of-the-art methods.
1 INTRODUCTION
The growth of video-surveillance in daily life appli-
cations (Albanese et al., 2011) has opened the door to
the development of automatic systems for multiple-
object tracking (Bhat and Olszewska, 2014), suspi-
cious object detection (Ferryman et al., 2013), or un-
usual activity recognition (Chen et al., 2014), in a sin-
gle or multiple views of a recorded scene (Dai and
Payandeh, 2013).
In particular, the efficient detection and tracking
of objects of interest in a multi-camera environment
(Fig. 1) is still a challenging task. Indeed, it implies
the understanding of the camera network in terms of
visual coverage of the cameras (Mavrinac and Chen,
2013), calibration of the cameras (Remagnino et al.,
2004), etc. It also requires the design of computer
vision techniques being robust to varying lighting
conditions, or to objects occlusions of different na-
ture such as object-to-object occlusions and object-
to-scene occlusions (Yilmaz et al., 2006). Moreover,
it usually involves the modelling of the knowledge
about the scene, e.g. the number of the persons evolv-
ing in the scene, their location within the scene, or the
direction of their trajectory.
In the computer-vision literature, works perform-
ing multi-object tracking in multi-camera environ-
ment apply techniques such as synergy map (Evans
Figure 1: Samples of real-world, outdoor views acquired
by static, synchronized cameras in context of multi-camera
video surveillance of a passageway scene.
et al., 2013), probabilistic occupancy maps (Fleuret
et al., 2008), or K-shortest path (Berclaz et al., 2011)
to model such knowledge. Despite being widely used,
these statistical methods are limited in terms of scal-
ability with respect to the number of considered, con-
textual data (Riboni and Bettini, 2011).
On the other hand, symbolic representation has
been used to codify knowledge about visual scenes
in context of video content analysis (Bai et al.,
2007), video summarization (Park and Cho, 2008),
Olszewska, J.
Tracking The Invisible Man - Hidden-object Detection for Complex Visual Scene Understanding.
DOI: 10.5220/0005852302230229
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 2, pages 223-229
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
223

or video annotation (Natarajan and Nevatia, 2005),
(Jeong et al., 2011), especially modelling the video-
surveillance domain (Vrusias et al., 2007). In these
works, ontologies have been developed to describe the
studied visual scenes, but not to deduce new informa-
tion.
Recently, some papers propose to integrate struc-
tured symbolic knowledge into computer-vision sys-
tems for event recognition (Sridhar et al., 2010), event
prediction (Lehmann et al., 2014) or tracking estima-
tion (Gomez-Romero et al., 2011). These approaches
have been proven to be efficient. However, these
context-aware methods are mainly deductive rather
than inductive, and are designed for single camera
views only.
In this paper, we propose to incorporate symbolic
description of the scene together with ontological rea-
soning into a vision system to infer knowledge about
the scene in order to detect and track objects of inter-
est which may be hidden in some/most of the views.
Hence, the designed system features a multi-camera,
knowledge-based, detector and tracker of both visible
and non-visible objects of the scene, and generates a
complete, semantic description of the scene as well as
its visual annotation in all views.
The analysed scene is assumed to be acquired in
outdoor or indoor environment, captured by multiple,
synchronized cameras with overlapping field of views
(FOVs). Our system supports both static or mobile
cameras, and does not require the specific knowledge
of the parameters of the cameras.
Objects evolving in the scene could present occlu-
sions in one or several views. Occlusions could be
of object-to-object type, when two or more objects of
interest overlap each other in a ratio from 0.1 to 1 (or
full occlusion); or of object-to-scene type, when an
object of interest is partially or totally not visible due
to objects present in the background.
The developed intelligent vision system allows a
computationally efficient and accurate analysis of ob-
jects of interest evolving in one or multiple views of
a scene. It provides both qualitative and quantitative
answers to the following questions: How much ob-
jects are in the scene? Where are the objects in each
view? Is there a hidden object in a view? Which ob-
ject is hidden in that view? Where about it is hidden
in that view?
Hence, the contributions of this paper are twofold:
• the design of an automated vision system to de-
tect both visible and invisible objects of interest
evolving in real-world scenes captured by multi-
ple, synchronized cameras;
• the use of symbolic knowledge representation and
qualitative spatial relations for information induc-
tion rather than deduction, in context of auto-
mated detection and tracking of objects of interest
in multi-view scenes.
The paper is structured as follows. In Section 2,
we describe our system for multi-camera stream anal-
ysis (see Fig. 2) based on both computer vision tech-
niques to compute quantitative data, and on artificial
intelligence methods to process qualitative knowledge
in order to induce information. Our approach per-
formance have been assessed on standard, real-world
video-surveillance dataset as reported and discussed
in Section 3. Conclusions are drawn up in Section 4.
2 PROPOSED APPROACH
The proposed approach consists of seven steps as
summarized in Fig. 2.
At first, frames of the different views of the scene
are extracted from the videos acquired by cameras
which could have the same or different calibration pa-
rameters (see Fig. 4, 1st row).
Secondly, these visual views are processed in or-
der to be synchronized both in time and space. The
temporal synchronization consists in matching the
time stamp of each of the video frame with this of a
frame related to another view. Spatial matching (Fer-
rari et al., 2006) of temporally synchronized views is
performed by matching local descriptors extracted in
both frames of each of the background view. If there
is more than two views, the matching process is re-
peated for each of the pair of views. It is worth to note
that this second step could be done offline or partially
skipped in case of synchronized videos or previously
aligned views.
Thirdly, the visible objects of interest are de-
tected in each of the visual views as described in (Ol-
szewska, 2015) by means of active contours (see Fig.
4, 2nd row). Active contours are initialized based on
blobs obtained by combining both frame difference
and background subtraction techniques. Considering
a color image I(x, y) with M and N, its width and
height, respectively, and RGB, its color space, blobs
are computed in parallel by, on one hand, the differ-
ence between a current frame I
v
k
(x, y) in the view v and
the precedent one I
v
k−1
(x, y), and by, on the other hand,
the difference between the current frame I
v
k
(x, y) and
a background model of the view v, and afterwards, by
adding both results in order to extract the foreground
in the corresponding view. The background itself is
modeled using the running Gaussian average (RGA),
characterized by the mean µ
v
b
and the variance (σ
v
b
)
2
,
as the RGA method suits well for real-time tracking.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
224
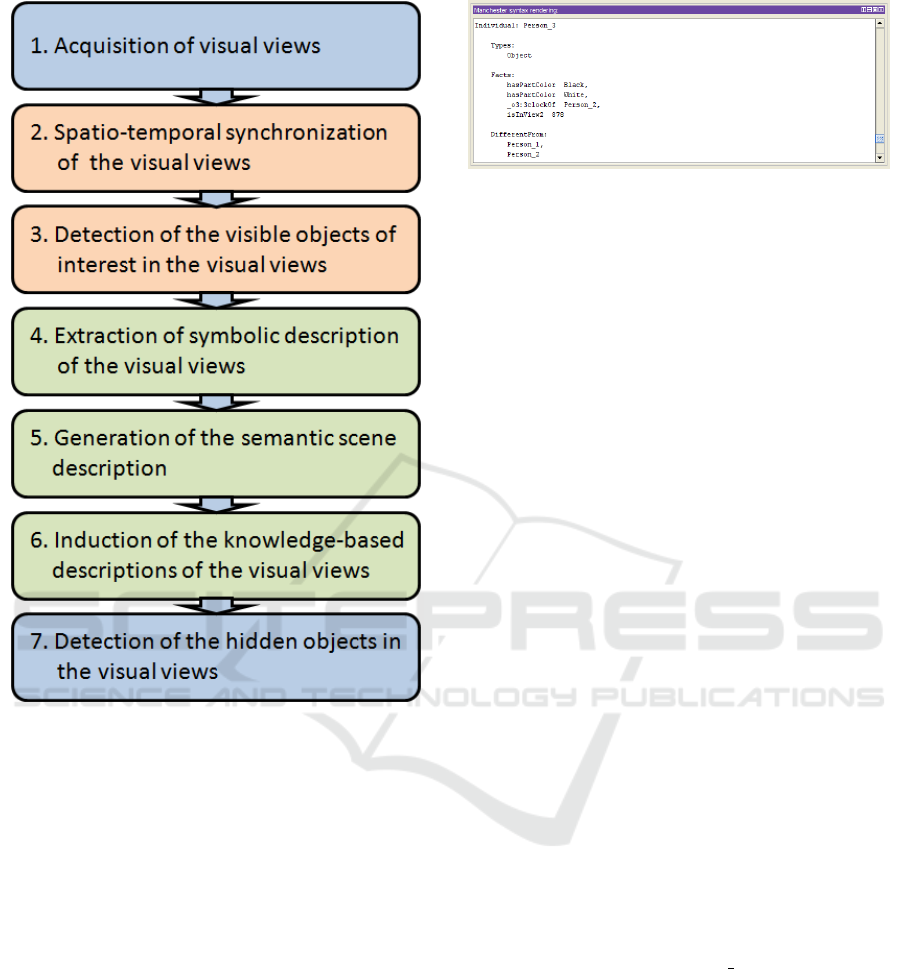
Figure 2: Overview of our symbolic-based approach for
hidden-object detection in a multi-camera environment.
Hence, the foreground is determined by (Ol-
szewska, 2015)
F
v
(x, y) =
(
1 if
F
v
f
(x, y)∪ F
v
b
(x, y)
= 1,
0 otherwise,
(1)
with
F
v
f
(x, y) =
(
1 if
I
v
k
(x, y)− I
v
k−1
(x, y)
> t f ,
0 otherwise,
(2)
and
F
v
b
(x, y) =
(
1 if
I
v
k
(x, y)− µ
v
b
> n · σ
v
b
,
0 otherwise,
(3)
where t f , is the threshold, and n ∈ N
0
.
To compute a final blob defined by labeled con-
nected regions, morphological operations such as
opening and closure are applied to the extracted fore-
ground F
v
, in order to exploit the existing information
Figure 3: Sample of auto-generated scene description in
OWL.
on the neighboring pixels, in a view v,
f
v
(x, y) = Mor ph(F
v
(x, y)). (4)
Then, an active contour is computed for each
frame k in each view v separately, and for each tar-
geted object. In this work, an active contour (Ol-
szewska, 2012) is a parametric curve C
C
C (s) : [0, 1] −→
R
2
, which evolves from its initial position computed
by means of Eq. (4) to its final position, guided by
internal and external forces as follows:
C
C
C
t
(s,t) = α C
C
C
ss
(s,t) − β C
C
C
ssss
(s,t) +Ξ
Ξ
Ξ, (5)
where C
C
C
ss
and C
C
C
ssss
are respectively the second
and the fourth derivative with respect to the curve pa-
rameter s; α is the elasticity; β is the rigidity; and Ξ
Ξ
Ξ is
the multi-feature vector flow (Olszewska, 2013) .
After the detection of the visible objects of interest
in the different views is performed using active con-
tours as explained above, the symbolic description of
the visual views is extracted automatically using the
framework set in (Olszewska and McCluskey, 2011)
and repeated for each of the view.
The generation of the semantic scene description,
as illustrated in Fig. 3 for a snippet of the scene
presented in Fig. 4., followed by the generation of
the views’ knowledge-based descriptions (Fig. 4, 3rd
row), is automatically induced by the reasoner. As
each view is related to another one because of the
overlapping fields of view of the same scene and be-
cause of views’ synchronisation, logic rules have been
defined in DL such as
hasInScene v Scene Property
t hasInView1
t ...
t hasInViewN,
(6)
where N ∈ N is the number of views, and
hasInViewn is set as a sub-property of hasInScene,
with n = 1, ..., N.
Then, the detection of the hidden objects in the vi-
sual views is based on this induced knowledge. More-
over, qualitative spatial relations such as RCC-8 and
the o’clock model applied to objects of each of the
views allow the definition of the potential regions
Tracking The Invisible Man - Hidden-object Detection for Complex Visual Scene Understanding
225
where could appear hidden objects. Finally, the non-
visible objects detected in the last step as well as the
visible objects detected in the third step are all local-
ized in the views by means of bounding boxes (see
Fig. 4, 4th row). The latter ones are computed to
surround the detected objects in order to use standard
metrics for sake of comparison with other methods,
when tracking over the time the target objects, as de-
tailed in Section 3.
3 EXPERIMENTS AND
DISCUSSION
To validate our approach, we have applied our system
on the publicly available CVLAB dataset (Berclaz
et al., 2011) called Passageway. It contains four
video-surveillance sequences, recorded each by one
of the four corresponding DV cameras at a rate of 25
fps, and encoded with Indeo 5. All cameras were
synchronized and located about 2 meters from the
ground. They were filming the same area under dif-
ferent angles, and their fields of view were overlap-
ping (Fig. 1). The resulting four videos are made of
2500 frames each, with a frame resolution of 360x288
pixels. The chosen location for the data acquisition
was an outdoor environment consisting of a dark un-
derground passageway to a train station, where were
evolving objects of interests, i.e. pedestrians.
This database of 10,000 images in total owns chal-
lenges such as handling variations of the persons in
quantity, pose, motion, size, appearance, and scale.
In particular, the area covered by the system is wide,
and people get very small on the far end of the scene,
making their precise localization challenging.
This series of multi-camera video sequences in-
volving several people passing through a public un-
derground passageway also presents large lighting
variations, which is typical in real-world surveillance
situations. Indeed, scene’s lighting conditions are
very poor, since a large portion of the images is ei-
ther underexposed or saturated.
Most importantly, this dataset requires the pro-
cessing of multi-view video streams where many
parts of the scenario were filmed by only two or even a
single camera, with some people partially occluded or
not visible over significant numbers of frames in the
related views. All these difficulties make the dataset
challenging and interesting to test our approach.
All the experiments have been run on a computer
with Intel Core 2 Duo Pentium T9300, 2.5 GHz, 2Gb
RAM, using MatLab and OWL languages as well as
HermiT reasoner.
To evaluate the performance of our system, we
Table 1: Multiple Object Detection Accuracy (MODA)
and Multiple Object Detection Precision (MODP) in
CVLAB Passageway video frames, using approaches such
as (Fleuret et al., 2008), (Berclaz et al., 2011), and our.
3 2 our
MODA 63% 72% 96%
MODP 66% 70% 94%
Table 2: Multiple Object Tracking Accuracy (MOTA) and
Multiple Object Tracking Precision (MOTP) in CVLAB
Passageway video streams, using approaches such as
(Berclaz et al., 2011) and our.
2 our
MOTA 73% 95%
MOTP 68% 94%
adopt the standard CLEAR metrics, i.e. Multiple Ob-
ject Detection Accuracy (MODA) and Multiple Ob-
ject Detection Precision (MODP), as well as Multiple
Object Tracking Accuracy (MOTA) and Multiple Ob-
ject Tracking Precision (MOTP). These metrics have
become standard for the evaluation of detection and
tracking algorithms, and are convenient to compare
our approach with other works such as (Berclaz et al.,
2011). The detection precision metric (MODP) as-
sesses the quality of the bounding box alignment in
case of correct detection, while its accuracy counter-
part (MODA) evaluates the relative number of false
positives and missed detections (Kasturi et al., 2009).
The tracking precision metric (MOTP) measures the
alignment of tracks compared against ground truth,
while the tracking accuracy metric (MOTA) pro-
duces a score based on the amount of false positives,
missed detections, and identity switches (Bernardin
and Stiefelhagen, 2008).
Our approach has been tested for detection and
tracking of both visible and hidden objects of inter-
est on the four multi-camera video streams of the
CVLAB dataset.
Samples of our results are presented in Fig. 4.
This scene presents difficult situations such as strong
patterns, e.g. the yellow line on the floor in views 2
and 3 or the staircases in views 3 and 4, poor fore-
ground/background contrast, light reflections, or il-
lumination changes. Moreover, some target objects
could only be seen in one of the views as per config-
uration illustrated in Fig. 1. Hence, in Fig. 4, the
three persons present in the scene are only visible in
one of the four views (view 2). Views 1 and 4 only
show two of the three persons, whereas only one of
them appears in the view 3. Our system copes well
with these situations as discussed below.
In Table 1, we have reported the Multiple Ob-
ject Detection Accuracy (MODA) and Multiple Ob-
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
226

Figure 4: Examples of results obtained with our approach for a scene captured by four synchronized cameras with overlapping
field of views. First column: view 1; Second column: view 2; Third column: view 3; Fourth column: view 4. First row: step
1 - raw data images. Second row: step 3 - visible persons detected in each of the camera views (e.g. Person 1 by yellow active
contour; Person 2 by blue active contour; Person 3 by red active contour). Third row: step 6 - snippet of the automatically
generated description for each view (extracted knowledge in blue, inducted knowledge in yellow). Fourth row: step 7 -
detected persons in all views (bounding boxes), including the hidden persons (dotted bounding boxes). Best viewed in color.
ject Detection Precision (MODP) rates of our method
against the rates achieved by (Fleuret et al., 2008)
and (Berclaz et al., 2011), while in Table 2, we
have displayed the Multiple Object Tracking Accu-
racy (MOTA) and Multiple Object Tracking Preci-
sion (MOTP) scores of our method against the rate
obtained by (Berclaz et al., 2011).
From Tables 1-2, we can observe that our sys-
tem provides reliable detection of objects of interest
in multi-camera environment, and that our multiple-
object tracking method is also very accurate, outper-
forming state-of-the-art techniques. Indeed, methods
relying, e.g. on detection maps which can get very
noisy due to the difficult real-world, outdoor environ-
ment conditions, have thus their performance greatly
affected (Fleuret et al., 2008), (Berclaz et al., 2011),
unlike our approach.
Furthermore, state-of-the-art methods only deal
with partial occlusions of the objects, whereas our
system allows the detection of hidden objects, i.e. ob-
jects of interest fully occluded by either other fore-
ground objects or by background objects. Our sys-
tem performs the invisible object detection and track-
ing by means of the conjunction of effective vision
techniques with knowledge induction and integration
of qualitative spatial relations. It is worth noting
that strong occlusions are an additional difficulty for
tracking systems to keep the tracks of the objects of
interest.
For all the dataset, the average computational
speed of our approach is in the range of milliseconds,
thus our developed system could be used in context of
real-world, video surveillance.
4 CONCLUSIONS
Detecting and tracking both visible and invisible ob-
jects in multi-camera environment is a challenging
task in video surveillance. For this purpose, we have
developed a system incorporating symbolic knowl-
edge, including spatial relations, into a computer-
vision framework. Our approach outperforms the
ones found in the literature for both object detection
Tracking The Invisible Man - Hidden-object Detection for Complex Visual Scene Understanding
227

and tracking as demonstrated on outdoor real-world
scenes, while the proposed conceptual reasoning con-
tribute to the visual processing, allowing the location
of hidden objects through knowledge induction.
REFERENCES
Albanese, M., Molinaro, C., Persia, F., Picariello, A., and
Subrahmanian, V. S. (2011). Finding unexplained ac-
tivities in video. In Proceedings of the AAAI Inter-
national Joint Conference on Artificial Intelligence,
pages 1628–1634.
Bai, L., Lao, S., Jones, G. J. F., and Smeaton, A. F. (2007).
Video semantic content analysis based on ontology.
In Proceedings of the IEEE International Machine Vi-
sion and Image Processing Conference, pages 117–
124.
Berclaz, J., Fleuret, F., Tueretken, E., and Fua, P. (2011).
Multiple object tracking using K-shortest paths opti-
mization. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 33(9):1806–1819.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: The CLEAR MOT
metrics. EURASIP Journal on Image and Video Pro-
cessing, 2008:1–10.
Bhat, M. and Olszewska, J. I. (2014). DALES: Automated
Tool for Detection, Annotation, Labelling and Seg-
mentation of Multiple Objects in Multi-Camera Video
Streams. In Proceedings of the ACL International
Conference on Computational Linguistics Workshop,
pages 87–94.
Chen, L., Wei, H., and Ferryman, J. (2014). Readin-
gAct RGB-D action dataset and human action recog-
nition from local features. Pattern Recognition Let-
ters, 50:159–169.
Dai, X. and Payandeh, S. (2013). Geometry-based object
association and consistent labeling in multi-camera
surveillance. IEEE Journal on Emerging and Selected
Topics in Circuits and Systems, 3(2):175–184.
Evans, M., Osborne, C. J., and Ferryman, J. (2013). Mul-
ticamera object detection and tracking with object
size estimation. In Proceedings of the IEEE Inter-
national Conference on Advanced Video and Signal
Based Surveillance, pages 177–182.
Ferrari, V., Tuytelaars, T., and Gool, L. V. (2006). Simulta-
neous object recognition and segmentation from sin-
gle or multiple model views. International Journal of
Computer Vision, 67(2):159–188.
Ferryman, J., Hogg, D., Sochman, J., Behera, A.,
Rodriguez-Serrano, J. A., Worgan, S., Li, L., Leung,
V., Evans, M., Cornic, P., Herbin, S., Schlenger, S.,
and Dose, M. (2013). Robust abandoned object detec-
tion integrating wide area visual surveillance and so-
cial context. Pattern Recognition Letters, 34(7):789–
798.
Fleuret, F., Berclaz, J., Lengagne, R., and Fua, P. (2008).
Multicamera people tracking with a probabilistic oc-
cupancy map. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 30(2):267–282.
Gomez-Romero, J., Patricio, M. A., Garcia, J., and Molina,
J. M. (2011). Ontology-based context representation
and reasoning for object tracking and scene interpre-
tation in video. Expert Systems with Applications,
38(6):7494–7510.
Jeong, J.-W., Hong, H.-K., and Lee, D.-H. (2011).
Ontology-based automatic video annotation technique
in smart TV environment. IEEE Transactions on Con-
sumer Electronics, 57(4):1830–1836.
Kasturi, R., Goldgof, D., Soundararajan, P., Manohar, V.,
Garofolo, J., Boonstra, M., Korzhova, V., and Zhang,
J. (2009). Framework for performance evaluation
of face, text, and vehicle detection and tracking in
video: Data, metrics, and protocol. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
31(2):319–336.
Lehmann, J., Neumann, B., Bohlken, W., and Hotz, L.
(2014). A robot waiter that predicts events by high-
level scene interpretation. In Proceedings of the In-
ternational Conference on Agents and Artificial Intel-
ligence, pages I.469–I.476.
Mavrinac, A. and Chen, X. (2013). Modeling coverage in
camera networks: A survey. International Journal of
Computer Vision, 101(1):205–226.
Natarajan, P. and Nevatia, R. (2005). EDF: A framework for
semantic annotation of video. In Proceedings of the
IEEE International Conference on Computer Vision
Workshops, page 1876.
Olszewska, J. I. (2012). Multi-target parametric active con-
tours to support ontological domain representation. In
Proceedings of the RFIA Conference, pages 779–784.
Olszewska, J. I. (2013). Multi-scale, multi-feature vector
flow active contours for automatic multiple-face de-
tection. In Proceedings of the International Confer-
ence on Bio-Inspired Systems and Signal Processing.
Olszewska, J. I. (2015). Multi-camera video object recog-
nition using active contours. In Proceedings of the In-
ternational Conference on Bio-Inspired Systems and
Signal Processing, pages 379–384.
Olszewska, J. I. and McCluskey, T. L. (2011). Ontology-
coupled active contours for dynamic video scene un-
derstanding. In Proceedings of the IEEE International
Conference on Intelligent Engineering Systems, pages
369–374.
Park, H.-S. and Cho, S.-B. (2008). A fuzzy rule-based sys-
tem with ontology for summarization of multi-camera
event sequences. In Proceedings of the International
Conference on Artificial Intelligence and Soft Com-
puting. LNCS 5097., pages 850–860.
Remagnino, P., Shihab, A. I., and Jones, G. A. (2004). Dis-
tributed intelligence for multi-camera visual surveil-
lance. Pattern Recognition, 37(4):675–689.
Riboni, D. and Bettini, C. (2011). COSAR: Hybrid reason-
ing for context-aware activity recognition. Personal
and Ubiquitous Computing, 15(3):271–289.
Sridhar, M., Cohn, A. G., and Hogg, D. C. (2010). Un-
supervised learning of event classes from video. In
Proceedings of the AAAI International Conference on
Artificial Intelligence, pages 1631–1638.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
228

Vrusias, B., Makris, D., Renno, J.-P., Newbold, N., Ahmad,
K., and Jones, G. (2007). A framework for ontol-
ogy enriched semantic annotation of CCTV video. In
Proceedings of the IEEE International Workshop on
Image Analysis for Multimedia Interactive Services,
page 5.
Yilmaz, A., Javed, O., and Shah, M. (2006). Object Track-
ing: A Survey. ACM Computing Surveys, 38(4):13.
Tracking The Invisible Man - Hidden-object Detection for Complex Visual Scene Understanding
229
