
The Technology of Management of Data About Wireless Networks for
Vehicle’s Telematics Map
Mikhail Chuvatov, Vadim Glazunov, Leonid Kurochkin and Serge Popov
Telematics Department, Peter the Great St. Petersburg Polytechnic University, Saint-Petersburg, Russia
Keywords:
Vehicle, Telematic Map, Vehicle, Regular Mesh, Wireless Network, V2C, LTE, 3G, 4G, Wi-fi, Generalization,
DBMS, Terrestial SQL Query.
Abstract:
The article studies temporal characteristics of functioning of the system of registration and data updating
about the wireless networks signal level by the vehicle telematics card. The article presents algorithms of
placement and retrieval of data about the signal level of wireless local area network of a geographical region
into the database of multi-protocol unit of the vehicle; conditions and results of experiments on the study of
functioning time of the system of database management of telematics cards. The experiments showed that
the technology for collecting and updating map data on 2Hz request frequency can be applied. The results
of experiments can be used as a basis for development of a specialized layer of GIS to provide information
services of a moving vehicle to a driver and passengers.
1 INTRODUCTION
In a moving vehicle the problem of uninterruptible
access to informational resources outside of the ve-
hicle occurs (Zheng et al., 2015; Gerla et al., 2014;
Zaborovskiy et al., 2013). The problem relates to lo-
cality of data about available wireless networks at cur-
rent position on the route. The solution is to expand
the scope of available wireless networks for driverand
passengers on the whole route (Jaworski et al., 2011).
In this case, implementing the technology of manage-
ment of the telematics map gives the opportunity to
schedule the provision of telematics resources to the
driver and passengers during the movement of the ve-
hicle.
Continuous supply with actual data about wire-
less networks of the region relies on the telematics
map (Popov et al., 2015), which is a set of geoin-
formational system layers containing data about type,
name and signal level of wireless networks of the
area. In particular, it contains data about Wi-Fi, cellu-
lar, DSRC network (Miller et al., 2010; Dupuis et al.,
2014). For the telematics map to operate correctly,
each vehicle is continuously gathering data about sur-
rounding wireless networks and writing it into the lo-
cal (onboard) database where generalization occurs,
after which these data are ready to be extracted and
used for scheduling the data transmission upon a vehi-
cle movement along the route (Glazunov et al., 2015).
The article covers one of the option of the telem-
atics map implementation, which suggests to store the
signal level of wireless networks in the regular grid of
geographical coordinates. The choice of grid spacing
is defined by the mean coverage area of Wi-Fi net-
works, GPS accuracy, and vehicle’s speed. Different
spacing leads to corresponding among of stored data
about wireless networks signal level in the multipro-
tocol device’s database. The analysis of dependencies
between queries execution time and the grid spacing
values allows to draw a conclusion about applicability
of regular grid technology implementation in produc-
tion samples of multiprotocol devices.
The purpose of the study is to gather and ana-
lyze dependencies of execution times of the queries
which perform generalization and extraction of the
data about telematics resources in the area on the reg-
ular grid spacing using relational database.
2 ALGORITHMS OF
MANAGEMENT OF DATA
ABOUT WIRELESS
NETWORKS SIGNAL LEVEL IN
THE AREA
The process of management of data about wireless
networks signal level within the vehicle consists of
138
Chuvatov, M., Glazunov, V., Kurochkin, L. and Popov, S.
The Technology of Management of Data About Wireless Networks for Vehicle’s Telematics Map.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 138-143
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

two subprocesses: gathering and generalization of
data about surrounding wireless networks signal level
along the vehicle’s route, and extraction of corre-
sponding data at any arbitrary location of the vehicle.
The first subprocess is functioning continuously and
independently, while the second is starting only by
the user applications request. Figure shows the struc-
tural diagram of processes of service and user data
transmission 1.
Figure 1: Structural diagram of wireless networks data man-
agement within the vehicle.
Data write cycle provides updated representation
of wireless networks signal level, while read cycle
is a service for determining the networks availability.
Each subprocess is implemented as distributed algo-
rithm which is functioning on both vehicle and server
sides (Popov et al., 2015). In our work we set up
both parts on a single telematics device to eliminate
the impact of delays and bandwidth of communica-
tion channels and to get the accurate data about coop-
erative functioning of telematics map application and
database, GPS and Wi-Fi devices and services.
The algorithms handle the environment which in-
cludes geographical region data defined by the lati-
tude and longitude from upper right corner to lower
left one, current vehicle’s coordinates, and coordi-
nates of the area where the wireless networks avail-
ability data must be obtained.
To represent the geographical area on the telem-
atics map we specify a regular rectangular grid with
fixed spacing. Each node of the grid stores the value
of wireless network signal level. This value is then
updated with the new values from the vehicle’s on-
board telematics unit. To implement the proposed
concept we have developed and examined the al-
gorithms for gathering, generalization, updating and
extraction of relevant data about wireless networks
availability.
The algorithm of adjusting the data about wireless
network signal level in the nodes of regular grid.
The data adjustment algorithm performs a task of
updating the wireless networks data on the telematics
map as far as positioning device and Wi-Fi adapter
feed it with new data.
Input data for the algorithm are geographical re-
gion which is represented by the regular rectangular
grid with spacing of 5, 10, 15, 20, 25, 30 meters, the
latitude and longitude of position where new value of
signal level was measured and this new value itself.
Using the given latitude and longitude values we find
the four-linkedrectangular area on regular grid, inside
of which area the vehicle is located. When the area is
found, we calculate the values of signal level in four
neighboring nodes and update corresponding data in
the database. Listing 1 shows the description of the
algorithm in pseudocode.
The algorithm provides continuously repeatable
calculations with frequency defined by GPS and Wi-
Fi equipment polling rate. Latitude and longitude cal-
culation of four neighboring nodes of the grid take
into account the correction factors for parallels and
meridians at the location where the data were ac-
quired. For this purpose, we calculate the distance
corresponding with one degree of latitude and longi-
tude at the given location, thus allowing to consider
correction values for any location.
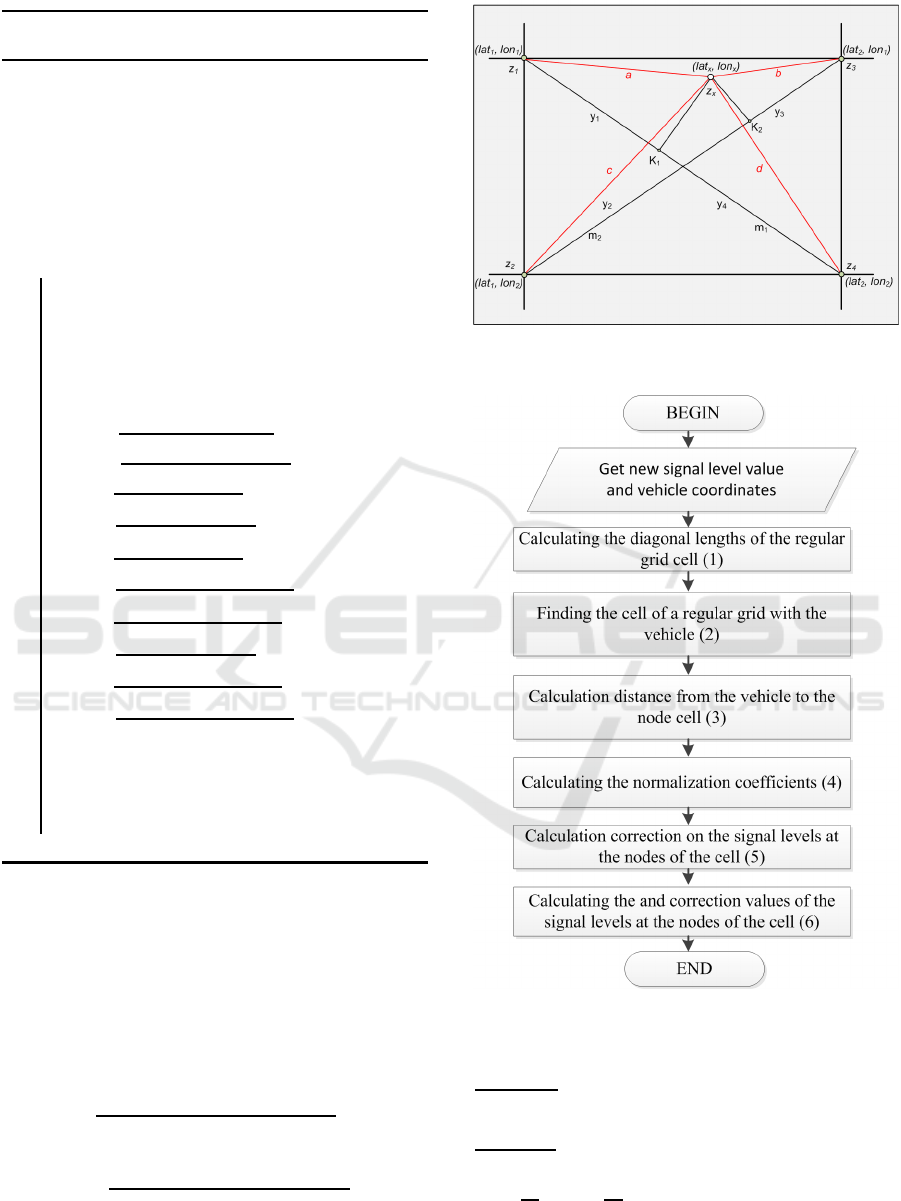
The algorithm of approximation of wireless net-
works signal level in the area.
The algorithm’s purpose is to approximate the sig-
nal level written to the nodes of the grid according to
the signal level values gatheredby the vehicle’s telem-
atics unit during its movement
When a new position with some signal level is de-
termined inside the grid, we calculate the distance
between this location and each of the neighboring
nodes of the grid, then we normalize this distances
and calculate the adjustments that will be applied to
the signal level values already stored in the nodes.
Schematic representation of this routine is shown on
the figure 2.
Let z
x
be the signal level at the point x with
coordinates (lat
x
, lon
x
) and signal level
x
;and let the
four nearest grid points with latitude and longitude
to ((lat
i
, lon
j
), (i, j) = [1. . . 4]); a, b, c, d be the dis-
tances from the point x to nodes of a regular grid
cell;and let K
1
and K
2
be the coefficient of linear-
ity; and let m
1
and m
2
be the length of the diagonals;
and let z
i
, i = [1. . . 4] be the signal levels of nodes of
quadruply-connected areas calculated using the algo-
rithm of data update see bellow.
First compute the distance a, b, c, d from the point
x to the closest nodes of the cell; then calculate and
The Technology of Management of Data About Wireless Networks for Vehicle’s Telematics Map
139
Algorithm 1: The pseudocode of the algorithm of ad-
justing the wireless networks data in the grid nodes
Data: Latitude and longitude (lat
x
, lon
x
) of the
vehicle’s location; p
i
— regular grid
nodes with coordinates (lat
i
, lon
i
), where
i = [1. . . 4]; geographical grid of
rectangular area with corners coordinates
(lat
1
, lon
1
);(lat
2
, lon
2
) and spacing k.
Result: Updates values of signal level at four
neighboring nodes.
1 while Have GPS and Wi-Fi data do
2 GET from GPS (lat
x
, lon
x
); from Wi-Fi
level
3 lat
m
— length of one degree of latitude in
meters
4 lon
m
— length of one degree of longitude
in meters
5 N
lat
=
|(lat
2
∗lat
m
)−(lat
x
∗lat
m
)|
k
6 N
lon
=
|(lon
2
∗lon
m
)−(lon
x
∗lon
m
)|
k
7 z
1
lat
=
((lat
2
∗lat
m
)+N
lat
∗k)
lat
m
8 z
1
lon
=
((lon
2
∗lon
m
)+N
lon
∗k)
lon
m
9 z
2
lat
=
((lat
2
∗lat
m
)+N
lat
∗k)
lat
m
10 z
2
lon
=
((lon
2
∗lon
m
)+[(N
lon
+1)∗k])
lon
m
11 z
3
lat
=
((lat
2
∗lat
m
)+[(N
lat
+1)∗k])
lat
m
12 z
3
lon
=
((lon
2
∗lon
m
)+N
lon
∗k)
lon
m
13 z
4
lat
=
((lat
2
∗lat
m
)+[(N
lat
+1)∗k])
lat
m
14 z
4
lon
=
((lon
2
∗lon
m
)+[(N
lon
+1)∗k])
lon
m
15 database query
16 update(
17 (z
1
lat
, z
1
lon
); (z
2
lat
, z
2
lon
);
18 (z
3
lat
, z
3
lon
); (z
4
lat
, z
4
lon
))
19 end
normalize the given to diagonal distances m
1
, m
2
; and
then on their basis determine corrections to the sig-
nal levels at the nodes. At the last step of the algo-
rithm the corrected values are taken as new nodes in
the mesh. The block diagram of the algorithm is given
in figure 3.
The algorithm performs the following mathemati-
cal operations:
calculation of distances to the grid points a, b, c,
d, for example, on distance a:
|a| =
p
(lat
x
− lat
1
)
2
+ (lon
x
− lon
1
)
2
;
calculation of the lengths of the diagonals m
1
and
m
2
, for example on m
1
:
|m
1
| =
p
(lat
2
− lat
1
)
2
+ (lon
2
− lon
1
)
2
;
calculation of the normalized distances:
to the first diagonal m
1
= y
1
+ y
4
: |y
1
| =
Figure 2: Graphics representation of the algorithm of signal
level approximation.
Figure 3: Flow chart of the algorithm of linear approxima-
tion of the signal level.
(a
2
−d
2
+m
2
1
)
(2m
1
)
; |y
4
| = m
1
− y
1
;
for the second diagonal m
2
= y
2
+ y
3
: |y
2
| =
(c
2
−b
2
+m
2
2
)
2m
2
)
; |y
3
| = m
2
− y
2
;
Calculation of the normalization coefficients:
K
1
=
y
1
m
1
; K
2
=
y
2
m
2
the calculation of the correction of the level sig-
nals is based on the following formula:
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
140
for the first node: ∆z
i
= z
i
+ (z
x
∗ level
x
∗ K
i
2
),
where i ∈ [1. . . 4];
following equations are used to calculate new val-
ues of signal levels of node cells:
for the first node: z
′
i
= ∆z
i
+ |
(∆z
i
−z
i
)
n
i
|,
where i ∈ [1. . . 4] and n
i
is the number of changes
of the signal level in the corresponding unit cell.
The algorithm supports continuousupdating of the
values of the signal levelat the nodes of a regular grid.
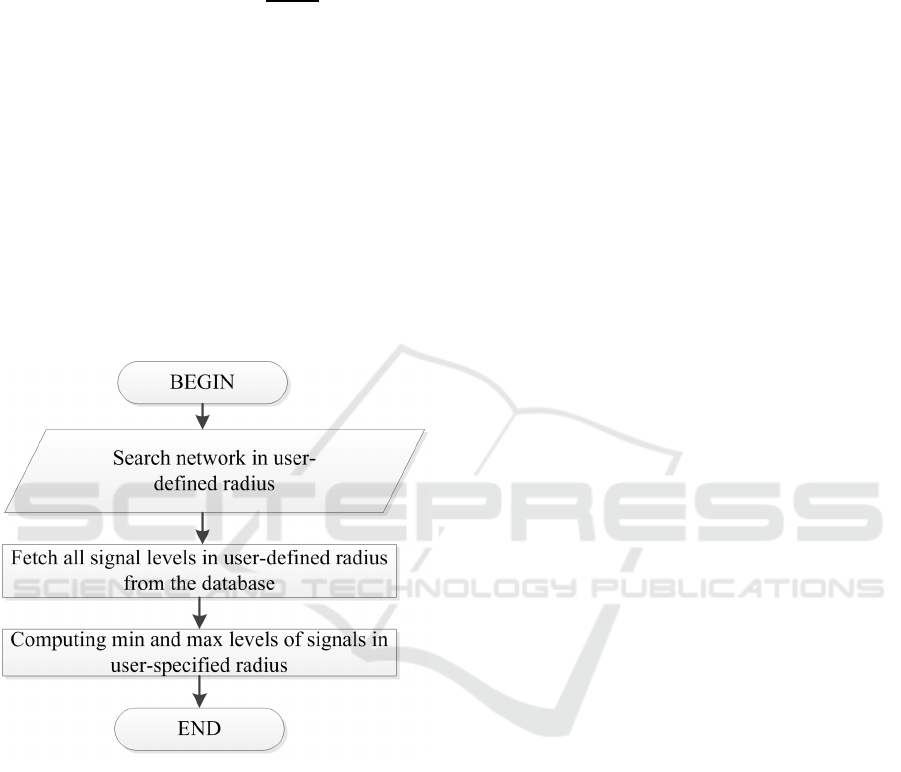
The algorithm of selection of signal level data of
wireless networks available in the area.
The algorithm of selection of wireless networks
signal level allows to schedule the provision of telem-
atics resources to the driver and passengers during the
vehicle’s movement along the route. Schematic dia-
gram of the algorithm is shown on the figure 4. Input
data for the algorithm are: latitude and longitude of
diagonal corners of the rectangular geographical area
where the signal level values must be obtained.
Figure 4: Schematic diagram of the algorithm of selection
of wireless networks signal level.
The algorithm allows to extract the data about
maximum and minimum signal level of wireless net-
works within the selected rectangular area.
3 EXPERIMENTAL CONDITIONS
AND RESULTS
Using the database scheme from (Glazunov et al.,
2015), we had implemented the algorithm of gener-
ation of regular grid with given spacing value, data
generalization algorithm, and algorithm of extraction
of wireless networks data from four-linked area. The
prototype of the telematics device used in experi-
ments is the multiprotocol unit, which was earlier
used as a part of cloud services test bench (Glazunov
et al., 2013).
The algorithm of regular grid management, gen-
eralization algorithm, and wireless data extraction al-
gorithm were all tested using a PC with an Intel Core
i5 processor clocked at 2.4 GHz, and equipped with
8 GB of RAM. The code and services were running
inside a virtual PC environment under Ubuntu Linux
12.04 LTS as a guest operating system. To implement
the algorithms, we used PHP version 5.3.10 program-
ming language. As a data storage we used MySQL
version 5.5.40 relational database management sys-
tem.
For each algorithm we wrote the script which in-
cludes implementation of the algorithm and time reg-
istration routines. As a test area we used the geo-
graphical region of 800× 300 meters size with coor-
dinates of its center at N60
◦
0
′
18.94
′′
E30
◦
22
′
33.32
′′
.
The data updating script generated equidistributed
random coordinates (lat
x
, lon
x
) inside the selected
area and signal level values level
x
at 2 Hz fre-
quency, and registered the time spent on execution
of data updating routines. Data extraction script gen-
erated equidistributed random coordinates of rectan-
gular area (lat
1
, lon
1
);(lat
2
, lon
2
) and registered the
time required to extract the maximum and minimum
signal level within the area. Execution times were
written to file for subsequent processing. Data updat-
ing script and data extraction script executed simulta-
neously.
After conducting a series of experiments, we got
some statistics about operations of data generalization
and selection in cases of different grid spacing.
Experiment shows that number of very slow data
generalization queries is a fraction of a percent. Mini-
mal query execution time equals for any selected grid
spacing, because database updates the first records in
the index of telematics map tables. The number of
records to store updated telematics map data depends
quadratically on grid spacing value. The grid data
took one page of the database table, so the size of the
table is constant.
Figure 5 shows the distribution of execution time
of data generalization routines on the grids with dif-
ferent spacing.
Diagram shows that query execution times distri-
bution is a gamma distribution, and that maximum
number of operations for any grid spacing except 5
and 10 meters fall less than 2.50 ms execution time
range. Maximum number of values in the range of
2.50–4.00 ms in case of grid with 5 meters spacing is
explained by the increasing search time of required
The Technology of Management of Data About Wireless Networks for Vehicle’s Telematics Map
141
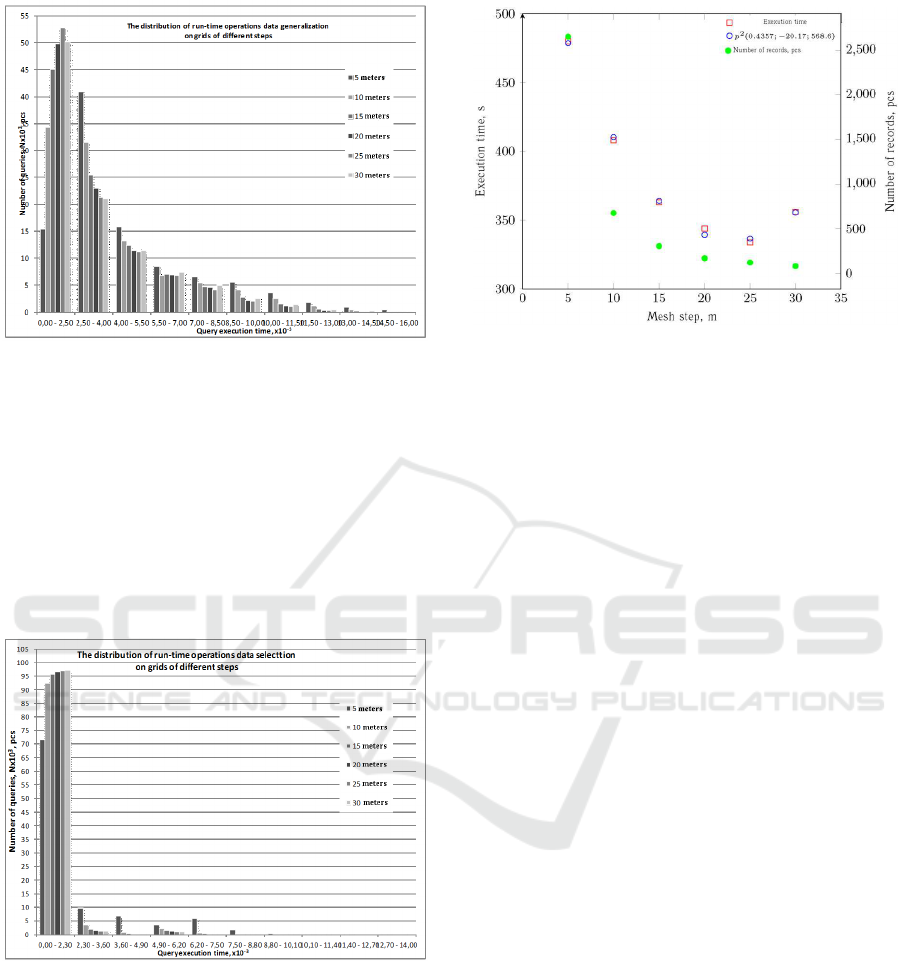
Figure 5: Distribution of execution time of data generaliza-
tion routines on the grids with different spacing.
range in the database table by the reason of large
amount of points.
More than 70% of all queries were executed faster
than 5 ms, thus allowingthese algorithms to operate in
parallel with other applications and processes which
use the telematics map.
The distribution of execution times of data extrac-
tion routines in case of different grid spacing is shown
on the picture 6.
Figure 6: The distribution of execution times of data extrac-
tion routines using different grid spacing.
Diagram shows that 90% of all operations require
less than 2 ms to complete, thereby providing uninter-
ruptible processing of large amount of queries from
the multiple user applications.
Diagram 7 shows the dependencyof the mean exe-
cution time of data updating and extraction algorithms
on the telematics map grid spacing. It is seen that
algorithms execution time quadratically depends on
grid spacing, which relates to quadratic dependency
of number of grid nodes on its spacing and linear de-
Figure 7: Dependency of execution times of the queries on
the number of database records.
pendence of query execution time on the number of
nodes. Irrelational increase in query execution time
in case of 30 meters grid spacing is explained by the
deny of the database query optimizer to use indexes
due to relatively small number of records in the reg-
ular grid table. Data processing time in this case will
noticeably decrease with the larger geographical area.
4 CONCLUSION AND
SUBSEQUENT WORK
This paper describes the experiments with the proto-
type of the multiprotocol node in part of implemen-
tation of the technology of wireless networks data
management within the telematics map with the use
of relational DBMS and high-level programming lan-
guage. The implemented algorithms of data gather-
ing, updating, and extraction shown the operability of
the prototype as a whole.
Conducted research of execution times has proved
the applicability of technology of telematics map data
updating and extraction at a rate of 2 Hz.
While the total write cycle time averages at 0.5
seconds, the algorithm only requires 3.6 ms average
in case of data updating and 1.45 ms average in case
of data extraction, which does not exceed 12% of to-
tal cycle time. These results allow to confidently talk
about possibility to increase the rate of map data up-
dates or connect multiple additional user applications
to the telematics map.
As a subsequent work we consider to analyze the
operational quality of algorithms of signal level val-
ues approximation in the grid nodes and a research
on synchronous and asynchronous mechanisms of
database replication between the local telematics map
and the cloud service.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
142

ACKNOWLEDGEMENTS
This research was supported by a grant from the Ford
Motor Company.
REFERENCES
Dupuis, Y., Merriaux, P., Subirats, P., Boutteau, R., Sa-
vatier, X., and Vasseur, P. (2014). Gps-based prelim-
inary map estimation for autonomous vehicle mission
preparation. In Intelligent Robots and Systems (IROS
2014), 2014 IEEE/RSJ International Conference on,
pages 4241–4246.
Gerla, M., Lee, E.-K., Pau, G., and Lee, U. (2014). Internet
of vehicles: From intelligent grid to autonomous cars
and vehicular clouds. In Internet of Things (WF-IoT),
2014 IEEE World Forum on, pages 241–246.
Glazunov, V., Kurochkin, L., Kurochkin, M., and Popov, S.
(2013). Instrumental environment of multi-protocol
cloud-oriented vehicular mesh network. In Ferrier, J.-
L., Gusikhin, O. Y., Madani, K., and Sasiadek, J. Z.,
editors, ICINCO (1), pages 568–574. SciTePress.
Glazunov, V., Kurochkin, L., Popov, S., and Chuvatov,
M. (2015). Prototype of the telematics map cloud
service. In Open Innovations Association (FRUCT),
2015 17TH Conference of, pages 50–55.
Jaworski, P., Edwards, T., Moore, J., and Burnham, K.
(2011). Cloud computing concept for intelligent trans-
portation systems. In Intelligent Transportation Sys-
tems (ITSC), 2011 14th International IEEE Confer-
ence on, pages 391–936.
Miller, J., il Kim, S., Ali, M., and Menard, T. (2010). Deter-
mining time to traverse road sections based on map-
ping discrete gps vehicle data to continuous flows.
In Intelligent Vehicles Symposium (IV), 2010 IEEE,
pages 615–620.
Popov, S., Kurochkin, M., Kurochkin, L., and Glazunov,
V. (2015). The implementing of the internet of things
concepts for the continuous provision of informational
services for vehicle drivers and passengers. In Telem-
atics and Future Generation Networks (TAFGEN),
2015 1st International Conference on, pages 1–5.
Zaborovskiy, V., Lukashin, A., Popov, S., and Vostrov, A.
(2013). Adage mobile services for its infrastructure.
In ITS Telecommunications (ITST), 2013 13th Inter-
national Conference on, pages 127–132.
Zheng, K., Zheng, Q., Chatzimisios, P., Xiang, W., and
Zhou, Y. (2015). Heterogeneous vehicular network-
ing: A survey on architecture, challenges, and so-
lutions. Communications Surveys Tutorials, IEEE,
17(4):2377–2396.
The Technology of Management of Data About Wireless Networks for Vehicle’s Telematics Map
143
